關(guān)于堆芯測量系統(tǒng)中子探測器運(yùn)行位置偏差的分析與控制
2019-09-10 07:22:44李斌李小波
科學(xué)導(dǎo)報·科學(xué)工程與電力 2019年43期
李斌 李小波
【摘 ?要】本文詳細(xì)描述了中子探測器位置控制原理,對調(diào)試中出現(xiàn)的中子探測器位置控制偏差進(jìn)行了詳細(xì)分析,提出的技術(shù)方案使探測器能被傳動裝置精確地送達(dá)指定位置,解決了探測器運(yùn)行過程中出現(xiàn)的大量位置報警故障,為系統(tǒng)投用及后續(xù)準(zhǔn)確可靠運(yùn)行提供了運(yùn)行保障。
【關(guān)鍵詞】中子探測器;位置偏差;位置開關(guān)
1.堆芯中子通量測量系統(tǒng)簡介
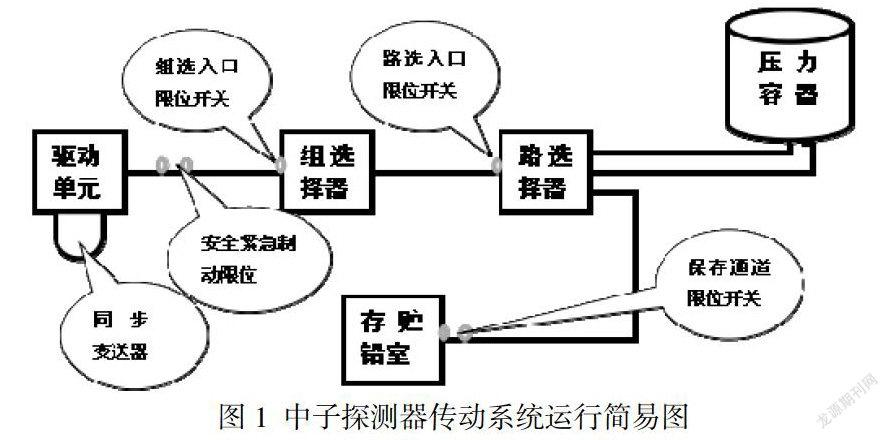
堆芯中子通量測量系統(tǒng)(FLUX)主要用于測量反應(yīng)堆堆芯的中子注量率分布,在運(yùn)行期間監(jiān)測堆芯功率畸變,積累燃耗數(shù)據(jù),對反應(yīng)堆的安全運(yùn)行、燃料料管理、最大允許功率的確定、各項實(shí)驗的進(jìn)行以及樣品的輻照都有極其重要的意義。該系統(tǒng)設(shè)備由法國AREVA供貨,主要組成包括:一個讀出控制柜和分配柜,機(jī)電控制設(shè)備4套(傳動裝置包括驅(qū)動單元、組選擇器、路選擇器、探測器、位置開關(guān)),測量通道38路(電動閥、密封組件、手動閥、指套管、導(dǎo)向管)及存貯鉛室。如圖1所示。

2.中子探測器運(yùn)行位置偏差的分析與控制
設(shè)備安裝完成后,利用模擬探頭對傳動裝置的控制精度進(jìn)行全面的檢驗與功能調(diào)試。根據(jù)現(xiàn)場調(diào)試中出現(xiàn)故障分析總結(jié)如下:
2.1 ?傳動裝置中影響探測器位置精確控制的因素分析
探測器位置精確控制受以下幾個主要因素影響:
(1)現(xiàn)場安裝位置的偏差,受安裝技術(shù)和現(xiàn)場物理位置及水平度等客觀因素的制約,使傳動裝置安裝位置與理論實(shí)際會存在一定的偏差,需要在安裝初期嚴(yán)格控制,控制傳動裝置的物理位置和水平度,使其偏差降低到最小。。
(2)探測器實(shí)際位置與顯示位置的偏差,主要由中子探測器螺旋電纜與驅(qū)動單元齒輪盤不同步以及螺旋電纜的制造精度引起,從而造成探測器實(shí)際位置與同步變送器反饋位置偏差,該問題需要通過調(diào)整驅(qū)動單元力矩以及驅(qū)動電纜轉(zhuǎn)盤松緊度解決。
(3)軟件參數(shù)設(shè)定值與位置開關(guān)(如圖1)反饋不一致導(dǎo)致的控制偏差,根據(jù)現(xiàn)場安裝實(shí)際情況來調(diào)試參數(shù),使其偏差達(dá)到允許范圍內(nèi)。
前兩種由安裝質(zhì)量決定,安裝調(diào)試完成后基本確定,根據(jù)前2項固有偏差大小及偏差方向,主要通過調(diào)試軟件設(shè)定參數(shù)來消除前2項固有偏差的方法,達(dá)到精確定位探測器的運(yùn)行位置。
2.2 ?調(diào)試過程中出現(xiàn)的位置錯誤報警分析
調(diào)試過程中出現(xiàn)限位開關(guān)和位置錯誤報警如下:
(1)1-4號探頭回抽到GS入口的過程中,探測器1、3動作,2、4不動作并出現(xiàn)Take up reel jam的報警,而1、3號探測器抽出到組選擇器(GS)入口后再插回到保存通道,結(jié)果無法動作,都出現(xiàn)保存限位開關(guān)錯誤報警storage switch fault。
(2)在探測器都抽出保存通道后卻無法將其送至指定位置,存在多種故障現(xiàn)象,如1、2、4號探測器都可以送至路選擇器(PS)入口,但再往前送9000步時就出現(xiàn)PS inlet switch fault故障;3號探測器根本不動作,無法控制,出現(xiàn)Take up reel jam報警;復(fù)位報警后再嘗試將其送至保存通道也無法實(shí)現(xiàn),并出現(xiàn)storage switch fault報警,同時出現(xiàn)Flux detector position fault Chanel X報警。
2.3 ?探測器位置偏差的調(diào)整與控制
(1)對于2、4號探測器,根據(jù)故障報警提示Take up reel jam,調(diào)試組分析可能的原因為:①驅(qū)動電機(jī)驅(qū)動力不足;②探測器與驅(qū)動齒輪卡塞,③供電系統(tǒng)斷路導(dǎo)致的自動制動保護(hù);④限位開關(guān)故障導(dǎo)致位置報錯。通過對每一種可能因素及故障排查,從檢查380V電源,再檢查驅(qū)動離合器的力矩,調(diào)節(jié)驅(qū)動輪與驅(qū)動電纜松緊度并嘗試手動抽出探測器,確認(rèn)驅(qū)動單元控制功能正常;再結(jié)合1、3號探測器出現(xiàn)的storage switch fault報警,將問題重點(diǎn)轉(zhuǎn)到保存通道限位開關(guān),經(jīng)檢查儲存通道限位開關(guān)發(fā)現(xiàn)裝反且接線方式有錯誤,根據(jù)技術(shù)規(guī)范,應(yīng)該將兩副常開觸點(diǎn)并聯(lián)才能實(shí)現(xiàn)雙重保護(hù)功能,將其改正后探測器都能抽出保存通道,此問題解決。
(2)對于探測器無法送達(dá)指定位置故障,根據(jù)報警提示PS inlet switch fault和Flux detector position fault Chanel X,調(diào)試組決定將所有的限位開關(guān)都校驗一遍,包括組選入口、路選入口、保存通道、以及各通道位置開關(guān),但都未發(fā)現(xiàn)問題。最后通過反復(fù)動作探測器觀察,探測器在從初始位置送至保存通道時雖然出現(xiàn)報警,但都是送到組選出口不遠(yuǎn)處就停止,且探測器先高速再低速最后停止,4個探測器現(xiàn)象相同,說明軟件控制命令能正常發(fā)出并接受,只是命令無法使探測器運(yùn)行到指定位置。根據(jù)探測器的運(yùn)行特點(diǎn),分析很有可能是命令中指定的位置與實(shí)際位置不符,以致在其運(yùn)行很短一段距離后軟件認(rèn)為其已到達(dá)所指定位置,從而自動停止,導(dǎo)致出現(xiàn)錯誤報警。通過測量其實(shí)際運(yùn)行的距離為1.8m,比對軟件初始參數(shù)發(fā)現(xiàn)保存通道位置參數(shù)都是設(shè)置在1800步,剛好與實(shí)際運(yùn)行距離1.8m相符,而保存通道的實(shí)際位置在17000左右,修改軟件位置參數(shù)到17000左右,探測器順利回插到保存通道。以此類推,同樣其他特定位置的設(shè)置參數(shù)也需要相應(yīng)的調(diào)整。初步設(shè)定參數(shù)后再通過軟件對比反饋的位置偏差信息反復(fù)調(diào)整,慢慢將誤差調(diào)整到可接受范圍內(nèi),從而消除偏差報警。
3.經(jīng)驗總結(jié)
控制系統(tǒng)發(fā)出位置控制命令后,探測器先快速移動到指定位置附近再轉(zhuǎn)換成慢速運(yùn)行,有150步低速調(diào)整,此時同步發(fā)送器將探測器實(shí)時位置數(shù)據(jù)反饋給控制系統(tǒng),系統(tǒng)將根據(jù)實(shí)時位置與軟件參數(shù)設(shè)置值比對,從而確定其是否到達(dá)指定目標(biāo)位置并制動停運(yùn)探測器。當(dāng)探測器停運(yùn)后實(shí)際卻又沒到達(dá)指定目標(biāo)位置,指定位置限位開關(guān)未觸發(fā)動作,控制系統(tǒng)將檢測出不匹配現(xiàn)象,發(fā)出相應(yīng)位置的限位開關(guān)錯誤報警。這也驗證了之前分析出的探測器運(yùn)行位置控制原理,軟、硬件協(xié)同控制,相互驗證達(dá)到精確控制的目的。通過分析順利解決了位置偏差問題,保障了系統(tǒng)安全穩(wěn)定投于運(yùn)行。
作者簡介:
李斌(1987-),男,湖南邵陽,中級工程師,本科,從事核電廠常規(guī)島控制系統(tǒng)、全廠數(shù)字化控制系統(tǒng)等設(shè)備管理工作。
李小波,高級工程師,維修處,現(xiàn)從事核電廠全廠數(shù)字化控制系統(tǒng)等儀控運(yùn)維工作。
(作者單位:海南核電有限公司)
