基于人體外骨骼便攜按摩助力裝備
2019-09-10 01:55:46陳新全應捷
科學導報·科學工程與電力 2019年40期
陳新全 應捷


【摘? 要】隨著社會的發展,越來越多的子女選擇離開家鄉和父母。導致了社會上越來越多的空巢老人問題,而隨著年齡增加,這些老人行動時愈發困難。為了解決老人們由于行動不便帶來的種種問題,本項目根據人體基本構造原理,設計了幫助老人更好地走路、運動的“外骨骼按摩助力裝置”。在為老年人助力行走的同時起到輔助按摩的效果。本作品根據單片機自動控制技術和機械設計原理,設計基于人體外骨骼便攜助力按摩裝備。該裝置是針對在當前社會背景中暴露出的問題設計的一款輔助行動不便老年人行走,緩解其身體壓力的按摩助力儀器。
主要功能:①輔助老年人正常行走,上坡、爬樓等日常活動。②對老年人背部按摩,緩解身體疲勞。
【關鍵詞】外骨骼;髖關節助力;按摩
一、引言
自2020年起,中國進入了小康時代,但與此而來的是越來越多的老齡化人口。根據《2019-2025中國人口老齡化市場研究及發展趨勢研究報告》的調查,目前我國已進入老齡化階段,2020年我國65歲及以上老年人口比例達11.70%,即將步入深度老齡化,預計2040年我國65歲及以上老年人口比例超過20%,進入超老齡化社會。同時也伴隨著一系列的社會問題,其中老年人的行動困難,無人幫助就是其中之一。
調查目前市場上現存的助力方式,可以發現外骨骼技術是融合傳感、控制、信息、融合、移動計算,為作為操作者的人提供一種可穿戴的機械機構的綜合技術。目前,全球有不少研發生產外骨骼機器人的企業。但當下直接讀取操作者意圖的傳感器還不夠成熟,比如EMG的數據噪音、建模口校準的難度都很大,比如說Hybrid Assistive Limb(HAL5)這款外骨骼采用了EMG信號控制機器人,但是需要2個月的時間來標定肌電信號。而且在動態環境中保持傳感器的精確度是個很大的挑戰,同樣在使用交互力來控制外骨骼也有類似的問題。
目前,全球有不少研發生產外骨骼機器人的企業,其中歐美等發達國家康復機器人產業起步較早。目前,包括美國和以色列的產品在內,平均一臺外骨骼機器人的價格在60-100萬人民幣之間。國外外骨骼機器人公司主要包括B-Temia、Lockheed Martin、Bionic Power等,其中做得比較出色的以色列的Rewalk、美國的EKSO都已經拿到了美國FDA的認證,日本的Cyberdyne也取得了CE認證,進入上市銷售階段。中國也有多家企業進入外骨骼機器人領域,并研發出了新產品。這些企業設計機器人大多投入軍事使用,民用較少,且普及度較低。
此外,當下直接讀取操作者意圖的傳感器還不夠成熟,如EMG的數據噪音、建模口校準的難度都很大,如Hybrid Assistive Limb(HAL5)這款外骨骼采用了EMG信號控制機器人,但是需要2個月的時間來標定肌電信號。而且在動態環境中保持傳感器的精確度是個很大的挑戰,同樣在使用交互力來控制外骨骼也有類似的問題。隨著經濟的不斷發展以及人們生活節奏的不斷加快,人們越來越重視老年群體的身心健康。而用推拿按摩進行保健,是我國中華醫學的傳統項目,特別當客戶為老年群體時,應用范圍會更加廣泛。
二、機械設計
2.1整體結構設計
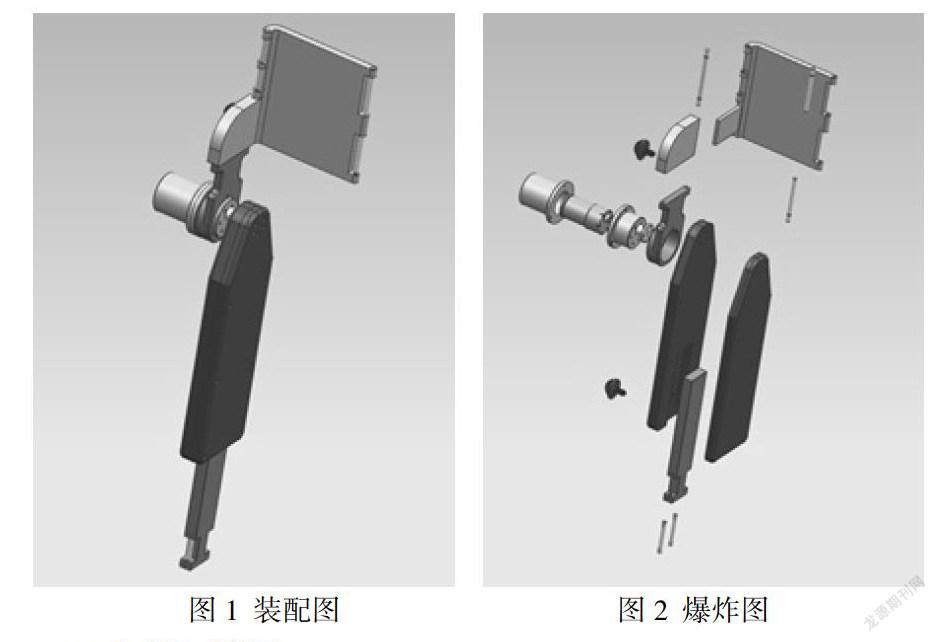
本機構結構基礎為人體外骨骼裝置,遵循基本的人體外骨骼設計,同時由于用途的特殊性,該人體外骨骼只作用于人體髖關節處,為行走時髖關節助力,因此整體結構集中在腰部及髖關節。整個機構有三處固定點,主要固定點為腰部,其次在兩大腿處也有固定點,固定方式采用魔術貼帶的方式連接,既可以調節長度,也保證了穿戴在身上時的舒適度。其整體的設計結構及裝配爆炸圖如圖1圖2所示:
2.2長度調節模塊
介于不同人的身高及身材等各不相同,因此該外骨骼助力裝備還設計有長度調節機構。考慮到機構整體質量不易過大,在長度調節機構的設計上采取盡可能輕量化設計原則,采用了M8螺紋緊固連桿長度調節的設計方法,在螺釘的端部安裝橡膠墊片,起到了保護零件不被過度損壞,同時防止螺紋松動的作用。其結構設計如圖3所示:
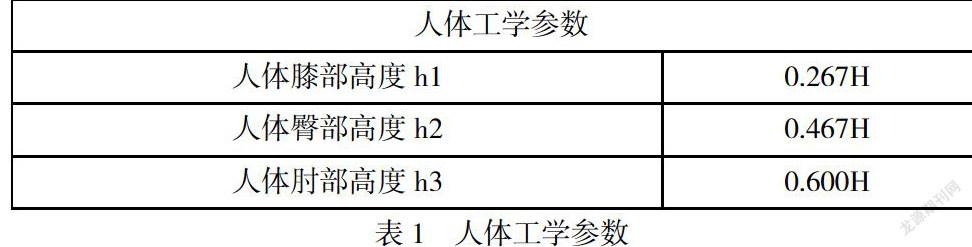
2.3各構件長度設計
各構件的長度尺寸結合人體工學進行設計,并且在功能上實現長度可調節的附加功能,使得該外骨骼機構在保證舒適性的基礎上盡可能滿足更多的人群。該機構所需要的人體工學殘數如表1所示(設人體總高度為H)。取較多數老年人的身高區間在155-165cm的范圍,則從髖關節位置到大腿底部的長度L的取值范圍近似為(h3-h2)*0.5*(1550~1650)+(h2-h1)*(1550~1650)。由上述公式計算可得最終連接器和驅動連桿的總有效長度為413.075~439.725mm之間。因此取連接器的長度為300mm,驅動連桿長度為200mm,由于該機構需要具備長度可調性質,因此設計驅動連桿有效長度為100~150mm。經過以上設計計算可得最終該助力外骨骼驅動裝置有效長度為400~450mm,可以滿足設計的基本要求。
三、硬件及軟件設計
3.1硬件整體設計
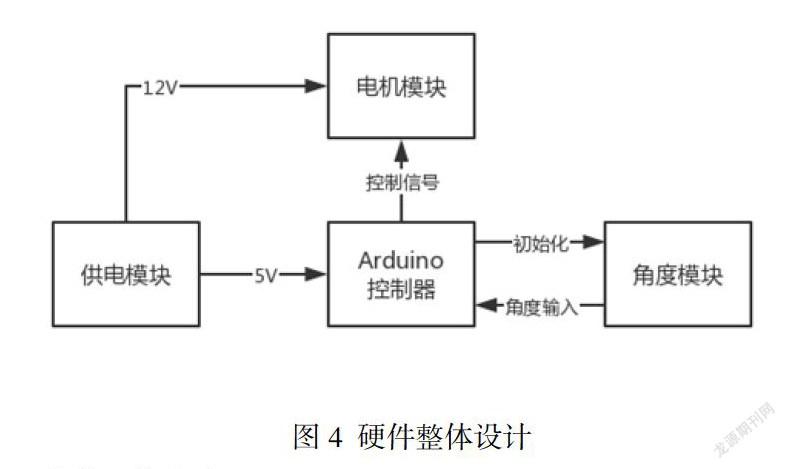
Arduino是目前較為流行的電子互動平臺,基于單片機系統開發,具有使用簡單、功能多樣、價格低廉等優點,廣泛應用于電子系統設計和互動產品開發方面。[1]因此本文介紹的“基于人體外骨骼便攜按摩助力裝備”的控制系統選用arduino控制器進行控制,由供電模塊進行供電,陀螺儀負責讀取角度輸入值,電機則為機構運動提供動力。硬件整體設計如圖4所示。
Arduino 系列單片機是一種基于開源代碼控制板,其系列第一塊主控板誕生于2005年,由意大利兩名大學教師David Cuartielles和Massimo Banzi和他們的學生共同開發完成。本設計選用的Arduino UNO R3主控板,基于ATmega328微控制器,硬件資源主要包括14個數字I/0引腳,6個模擬輸入引腳,1個DC接口,1個USB接口,1個復位按鍵等,足夠支撐設計完成控制過程。
供電模塊選用雙L298n電機驅動模塊,其外接電源后,能分別為arduino控制器和電機模塊提供穩定的12V和5V的電壓,保證兩者正常工作;電機模塊選用了MG540大扭矩編碼減速電機和370型雙頭扇型震動電機。前者通過速度調節,其最大能提供2kg.cm的扭矩,足夠帶動機構負載正常運轉。后者設置不同的轉速,帶動扇形頭運動,達到多檔調節按摩的目的;角度模塊選用MPU6050,集成了3軸 MEMS 陀螺儀和3軸 MEMS 加速度計,其高分辨率(3.9 mg/LSB)能夠測量不到1.0°的傾斜角度變化。[2]能夠測量機構當前運行位置,并通過串口實時反饋給單片機。
3.2軟件整體設計
程序主要實現功能過程是:開機后,單片機將此時機構運行位置記為0并設置震動電機輸出模式,即初始化,運行過程中單片機根據角度模塊測得的角度反饋給單片機,單片機對其角度進行處理,再根據讀取用戶是否切換震動電機模式,得到輸出速度,通過PWM輸出給電機。
程序流程圖如圖5所示:
四、材料強度及需求分析
4.1材料強度分析
該裝置主要受力部件為電機與腿部桿件的連接件,其整體材料采用ABS樹脂材質,加工方法采用SLA立體光固化成型,其具有精度高、速度快、表面光滑細膩的特點。同時ABS材料耐溫47℃,抗拉強度(拉伸)為47MPa,延展率可達3%,彎曲強度為67MPa,彈性模量為2370-2650MPa。同時ABS材料密度為1.3g/cm3,強度高,并具有良好的機械性,適用于強度高可靠性高的場合,同時密度較鋼材料小得多,適合于應用于外骨骼裝置。各項材料性能均滿足人體外骨骼的使用力學性能。
4.2需求分析
(1)腿腳不便的老年人口
本產品服務的對象是當前存在社會上的老齡人口。由于老年人身體素質較低,活動范圍有限。有時想出遠門時會依賴于代步器,如電動車、電動輪椅等,但這些代步器械在馬路上行駛時很容易引發交通化工事故,帶來不必要的隱患。
而如果老年人選擇一直待在家中,就會很容易換上其他疾病,如糖尿病、肥胖癥、產生心理問題,如抑郁癥,對他們的身心造成極大的損害。所以,為老年群體的身心著想,他們需要一個輔助行走的工具,去創造出更好地生活空間。
(2)自身身體素質較差的老年人口
目前,我國存在大量的六層樓以下且沒有電梯的老式居民樓,這直接導致部分老人由于自身身體素質差,上下樓梯異常困難,從而不想出門運動的問題。所以他們就更加需要一種輕巧、便攜的借力工具幫助他們更輕松的上下樓梯,給他們更多的機會出門運動,以增強體魄。
久坐或擁有腰部疾病的老年人口本產品會通過繃帶系在腰部,解決了老人行動時的腿腳不便;對于行走不便、只能久坐的老人,本產品通過腰部連接按摩裝置,增加按摩功能,有效地預防和解決老年人腰部疾病,提高產品對用戶的舒適度。通過促進功能多樣化,擴大用戶群體。
(3)子女外出務工的空巢老人
由于發達城市有更多的工作機會,很多年輕人離開了家鄉父母、在外獨自打拼。雖然會帶給他們一部分可觀的經濟收入,但由于這一類群體常年在外,家中老人大多缺乏必要的關懷和照料,直接導致老人日常起居安全性無法保證。老人獨自生活極易發生意外,有時細微的跌打損傷就容易引起嚴重的疾病。雖然富裕的家庭會通過聘請保姆的方式照料老人起居,但對于更多的普通家庭,他們難以承擔保姆的費用,所以就需要一款在助力行走的同時能有效防止老人意外跌倒的便攜式器械,以幫助家中老人們完成日常起居。
參考文獻:
[1]蔡睿妍.Arduino的原理及應用[J].電子設計工程,2012,20(16):155-157.DOI:10.3969/j.issn.1674-6236.2012.16.048.
[2]賴義漢.基于MPU6050的雙輪平衡車控制系統設計[j].河南工程學院學報(自然科學版),2014,01,53-57
[3]李銀波,湯子漢,季林紅,蒙奎霖,李質斌,關鑫宇.下肢外骨骼人機互連裝置對關節內力的影響[J/OL].清華大學學報(自然科學版):1-7[2019-04-10].https://doi.org/10.16511/j.cnki.qhdxxb.2019.21.019.
[4]陳寧寧,曹吉文,王鈺.外骨骼下肢運動步態的仿真研究[J].青島大學學報(工程技術版),2019,34(01):101-104.
[5]李德英.基于AT89C52單片機的智能按摩器設計[J].吉首大學學報(自然科學版),2019,40(01):30-33.
[6]李劍鋒,李國通,張雷雨,楊東升,王海東.穿戴式柔性下肢助力機器人發展現狀及關鍵技術分析[J/OL].自動化學報:1-12[2019-04-10].https://doi.org/10.16383/j.aas.c180286.
(作者單位:江蘇大學)
