基于UKF方法的鋰離子電池荷電狀態(tài)估計(jì)研究
2019-09-10 07:22:44李澤洋李振強(qiáng)呂豐
廣西科技大學(xué)學(xué)報(bào) 2019年3期
李澤洋 李振強(qiáng) 呂豐

摘 ? ?要:選用二階RC回路的電池模型,以單體的磷酸鐵鋰動力電池為研究對象,通過充電/放電電流脈沖實(shí)驗(yàn)獲得電池模型中的各個(gè)參數(shù)變化范圍,研究其荷電狀態(tài)(SOC)的估算方法.根據(jù)電池模型的狀態(tài)方程和輸出方程,運(yùn)用MATLAB軟件,利用無跡卡爾曼濾波(UKF)方法來估算鋰離子電池的SOC,并將其估算結(jié)果與擴(kuò)展卡爾曼濾波(EKF)方法的估算結(jié)果進(jìn)行比較.實(shí)驗(yàn)結(jié)果表明UKF方法能夠更精確地估計(jì)出動力電池的SOC.
關(guān)鍵詞:鋰離子電池;無跡卡爾曼濾波;擴(kuò)展卡爾曼濾波;SOC估計(jì)
中圖分類號:TM912 ? ? ? ?DOI:10.16375/j.cnki.cn45-1395/t.2019.03.007
引言
電池的荷電狀態(tài)(SOC)[1]通常為衡量電池剩余容量的重要指標(biāo),由于無法直接通過儀表測量,只能利用測量的電池工作電壓、電流等外部特性參數(shù),選用適當(dāng)?shù)墓烙?jì)算法進(jìn)行估算.因此,準(zhǔn)確估算動力電池的SOC在電動汽車應(yīng)用方面是研究的重點(diǎn).
目前有許多種研究電池SOC的估計(jì)方法.安時(shí)法[2]為一種常見的估算方法,當(dāng)電流恒定時(shí),利用安時(shí)法能夠準(zhǔn)確估計(jì)出動力電池的SOC;當(dāng)電流波動較大時(shí),由于存在誤差累積效應(yīng),估算電池SOC的準(zhǔn)確度降低.開路電壓法[3]是利用測量電池的開路電壓來估計(jì)電池的SOC,但是該方法不能在線估計(jì)動態(tài)電池的SOC.神經(jīng)網(wǎng)絡(luò)法[4]具有較好的自學(xué)習(xí)能力,但是受到訓(xùn)練方法和培訓(xùn)數(shù)據(jù)的影響,估計(jì)電池SOC的誤差較大.卡爾曼濾波(KF)方法[5]能夠?qū)€性系統(tǒng)進(jìn)行建模,常用于估計(jì)模型的參數(shù),但是,鋰離子電池由于充/放電的原因,電池內(nèi)部有極化效應(yīng)和擴(kuò)散效應(yīng),電池的動態(tài)模型為時(shí)變的非線性系統(tǒng).EKF方法[6-7]能夠估計(jì)動力電池的SOC,要對非線性系統(tǒng)進(jìn)行線性化,只能保留其一階導(dǎo)數(shù)項(xiàng)與常數(shù)項(xiàng),忽略非線性函數(shù)的高階導(dǎo)數(shù)項(xiàng),因此,估計(jì)電池的SOC有很大的誤差.UKF方法[8-9]是利用無跡變換(UT)[10]來處理數(shù)據(jù),擴(kuò)展數(shù)據(jù)長度,將原數(shù)據(jù)加權(quán)重構(gòu),保持?jǐn)?shù)據(jù)的均值與方差不變,運(yùn)用擴(kuò)展的數(shù)據(jù)對非線性系統(tǒng)的參數(shù)進(jìn)行估計(jì),參數(shù)估計(jì)的誤差與EKF方法相比較小.本文創(chuàng)新之處在于應(yīng)用實(shí)測的動力電池的充/放電數(shù)據(jù),建立其數(shù)學(xué)模型,針對此模型中時(shí)變參數(shù),通過大量實(shí)驗(yàn),獲得了時(shí)變參數(shù)的變化范圍,再運(yùn)用UKF方法估算出動力電池的SOC,估計(jì)的SOC更加準(zhǔn)確.
1 ? ?動力電池建模及參數(shù)估算
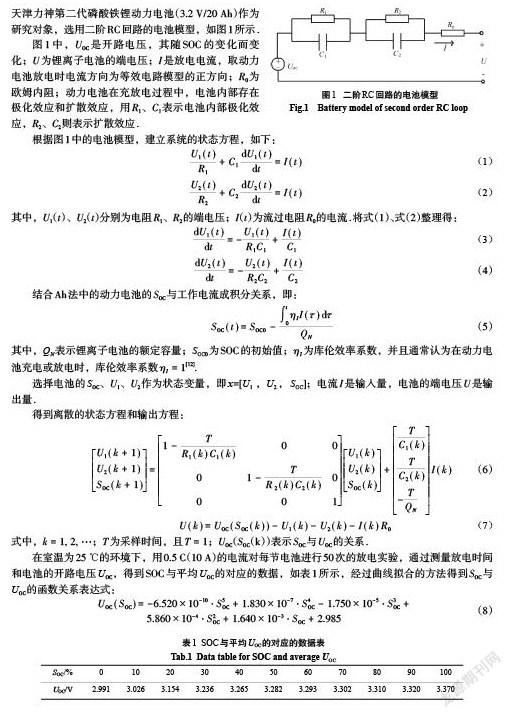
在動力電池的特性研究中,精確的電池模型有助于準(zhǔn)確地描述電池的內(nèi)部特性.等效電路模型[11]可以通過改變輸入電流信號來模擬鋰離子電池的不同工作狀況,并可以有效地模擬電池的動態(tài)特性,廣泛應(yīng)用于鋰離子電池建模.等效電路模型不僅能與其他方法互相結(jié)合,而且計(jì)算簡便,使模型更準(zhǔn)確.因?yàn)閯恿﹄姵鼐哂袕?qiáng)非線性特點(diǎn),選用多階RC等效電路模型,得到的準(zhǔn)確度會更高.但是,當(dāng)RC回路的數(shù)量增加時(shí),電池模型復(fù)雜程度和數(shù)據(jù)計(jì)算量也會隨之增加.為了便于工程應(yīng)用,本文選用同一批次的多塊單節(jié)天津力神第二代磷酸鐵鋰動力電池(3.2 V/20 Ah)作為研究對象,選用二階RC回路的電池模型,如圖1所示.
圖1中,UOC是開路電壓,其隨SOC的變化而變化;U為鋰離子電池的端電壓;I是放電電流,取動力電池放電時(shí)電流方向?yàn)榈刃щ娐纺P偷恼较?R0為歐姆內(nèi)阻;動力電池在充放電過程中,電池內(nèi)部存在極化效應(yīng)和擴(kuò)散效應(yīng),用R1、C1表示電池內(nèi)部極化效應(yīng),R2、C2則表示擴(kuò)散效應(yīng).
2 ? ?卡爾曼濾波法估計(jì)SOC
將電池模型設(shè)為非線性系統(tǒng),并使用非線性函數(shù)描述為:
式中,[f(?)]和[g(?)]分別為系統(tǒng)的狀態(tài)函數(shù)和觀測函數(shù);x(k)為系統(tǒng)的n維狀態(tài)變量;u(k)為系統(tǒng)輸入變量;W(k)是n維系統(tǒng)過程噪聲,其均值為零列向量[01×n],方差矩陣為[Qn×n];[V(k)]為[m]維系統(tǒng)觀測噪聲,其均值為零列向量[01×m],方差矩陣為[Rm×m].下面分別介紹EKF方法和UKF方法估計(jì)SOC.
2.1 ? EKF方法估計(jì)SOC
EKF方法是基于線性KF的方法之上,將非線性函數(shù)[f(?)]和[g(?)]展開成泰勒級數(shù)并略去二階以上項(xiàng),獲得近似線性模型,然后使用KF完成目標(biāo)的估計(jì).具體步驟如下:
3 ? ?實(shí)驗(yàn)仿真
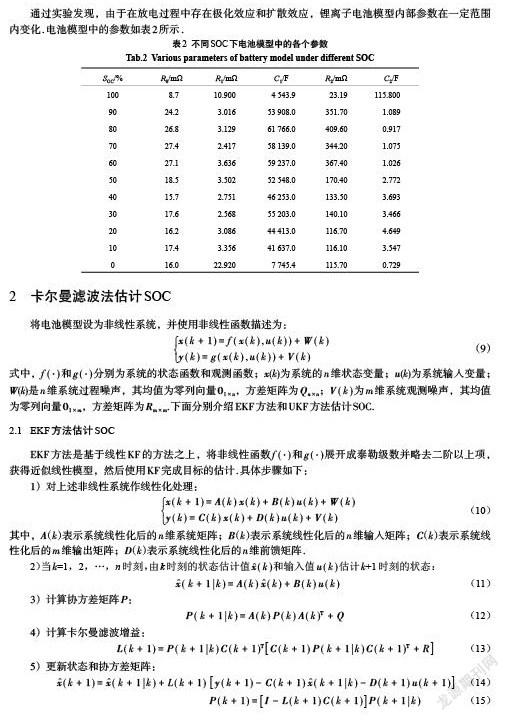
通過大量的充放電實(shí)驗(yàn),確定電池的初始容量為16 Ah,用0.5 C(10 A)的電流對電池進(jìn)行了連續(xù)放電實(shí)驗(yàn),測量得到電池的端電壓和放電消耗的電池容量(安時(shí)值).利用MATLAB仿真工具,基于UKF方法和標(biāo)準(zhǔn)EKF方法對鋰離子電池SOC進(jìn)行估算,估算結(jié)果與實(shí)際測量的電池容量進(jìn)行比較,判斷兩種估算方法的有效性.
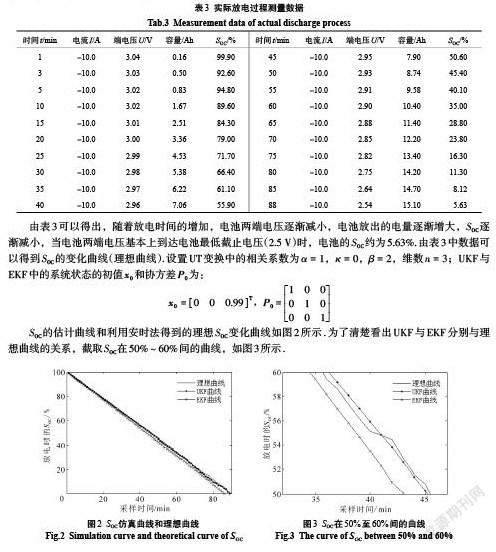
通過實(shí)驗(yàn)室中的電池測試系統(tǒng)對電池進(jìn)行放電實(shí)驗(yàn),每1 min采集一次數(shù)據(jù).由于篇幅要求,將實(shí)驗(yàn)數(shù)據(jù)進(jìn)行簡化,得到實(shí)際測量數(shù)據(jù)如表3所示.
由表3可以得出,隨著放電時(shí)間的增加,電池兩端電壓逐漸減小,電池放出的電量逐漸增大,SOC逐漸減小,當(dāng)電池兩端電壓基本上到達(dá)電池最低截止電壓(2.5 V)時(shí),電池的SOC約為5.63%.由表3中數(shù)據(jù)可以得到SOC的變化曲線(理想曲線).設(shè)置UT變換中的相關(guān)系數(shù)為[α=1],[κ=0],[β=2],維數(shù)[n=3];UKF與EKF中的系統(tǒng)狀態(tài)的初值[x0]和協(xié)方差[P0]為:
SOC的估計(jì)曲線和利用安時(shí)法得到的理想SOC變化曲線如圖2所示.為了清楚看出UKF與EKF分別與理想曲線的關(guān)系,截取SOC在50%~60%間的曲線,如圖3所示.
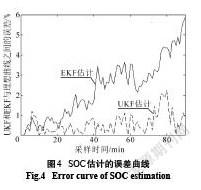
從圖2和圖3中可以看出,由于標(biāo)準(zhǔn)EKF將非線性方程進(jìn)行線性化處理,與理想SOC曲線之間的誤差較大;而UKF不對非線性方程在估計(jì)點(diǎn)處做線性化處理,估計(jì)SOC更加接近于理想的SOC曲線,在估計(jì)過程中的收斂性更好.圖4是利用標(biāo)準(zhǔn)EKF方法與UKF方法預(yù)估SOC的誤差比較曲線.
從圖4中可以看出,標(biāo)準(zhǔn)EKF的估計(jì)誤差逐漸增大,最大估計(jì)誤差達(dá)到6%,而UKF估計(jì)SOC的誤差變化比較平緩,最大誤差在2%.由此可知,UKF估計(jì)SOC的精度高于標(biāo)準(zhǔn)EKF的估計(jì)精度.所以,對于鋰離子電池這種強(qiáng)非線性系統(tǒng),UKF相對于標(biāo)準(zhǔn)EKF而言,在估計(jì)過程中避免了由于線性化過程忽略高階項(xiàng)帶來的誤差,具有更高的預(yù)估精度,更適用于預(yù)估動力電池SOC的研究.
4 ? ?結(jié)論
通過對磷酸鐵鋰動力電池進(jìn)行大量的充放電實(shí)驗(yàn),獲得了大量測量數(shù)據(jù);利用MATLAB軟件將這些數(shù)據(jù)進(jìn)行曲線擬合,得到電池模型中各個(gè)參數(shù)后建立電池模型的狀態(tài)方程和觀測方程,分別利用UKF與EKF方法對電池的SOC進(jìn)行預(yù)估.因?yàn)镋KF方法對非線性函數(shù)進(jìn)行泰勒級數(shù)展開并保留二階以下的項(xiàng),所以由于函數(shù)的線性化造成較大誤差;而利用UKF方法來估計(jì)SOC,通過分布式采樣的UT變換來計(jì)算非線性系統(tǒng)的統(tǒng)計(jì)特性,避免了由于線性化帶來的誤差.通過大量仿真實(shí)驗(yàn),驗(yàn)證了UKF預(yù)估SOC的精確度高于標(biāo)準(zhǔn)EKF估計(jì)的精確度.
參考文獻(xiàn)
[1] ? ? 左紅明,張彥會,陸文祺,等. 移動充電系統(tǒng)的鋰電池SOC的估算及檢測設(shè)計(jì)[J]. 廣西科技大學(xué)學(xué)報(bào),2019,30(1):71-78.
[2] ? ? ZHANG Y H,SONG W J,LIN S L,et al. A novel model of the initial state of charge estimation for LiFePO4 batteries[J]. Journal of Power Sources,2014,248:1028-1033.
[3] ? ? XU L,WANG J P,CHEN Q S. Kalman filtering state of charge estimation for battery management system based on a stochastic fuzzy neural network battery model[J]. Energy Conversion and Management,2012,53(1):33-39.
[4] ? ? HU X S,SUN F C,ZOU Y. Comparison between two model-based algorithms for Li-ion battery SOC estimation in electric vehicles[J]. Simulation Modelling Practice and Theory,2013,34:1-11.
[5] ? ? 黃世回,蔡啟仲,王汝鋼. 儲能電站蓄電池SOC在線最優(yōu)估計(jì)[J]. 廣西工學(xué)院學(xué)報(bào),2013,24(2):40-45.
[6] ? ? RAMADAN H S,BECHERIF M,CLAUDE F. ?Extended kalman filter for accurate state of charge estimation of lithium-based batteries:a comparative analysis[J]. International Journal of Hydrogen Energy,2017,290:33-46.
[7] ? ? 陳峭巖. 電動汽車電池狀態(tài)估計(jì)及均衡管理研究[D]. 天津:天津大學(xué),2014.
[8] ? ? HE W,WILLIARD N,CHEN C C,et al. State of charge estimation for electric vehicle batteries using unscented kalman filtering[J]. Microelectronics Reliability,2013,53(6):840-847.
[9] ? ? CHEN Z W,YANG L W,ZHAO X B,et al. Online state of charge estimation of Li-ion battery based on an improved unscented kalman filter approach[J]. Applied Mathematical Modelling,2019,70:532-544.
[10] ? DONG G Z,WEI J W,CHEN Z H,et al. Remaining dischargeable time prediction for lithium-ion batteries using unscented kalman filter[J]. Journal of Power Sources,2017,364:316-327.
[11] ? 張彥會,李鑫,左紅明. 磷酸鐵鋰電池滯回特性的修正算法研究[J]. 廣西科技大學(xué)學(xué)報(bào),2018,29(1):31-36.
[12] ? 李振強(qiáng),鄒麗蓉,黃杰. 鋰電池的模型參數(shù)與荷電狀態(tài)估計(jì)的研究[J]. 通信電源技術(shù),2016,33(1):18-21.
[13] ? GREWAL M S,ANDREWS A P. 卡爾曼濾波理論與實(shí)踐(MATLAB版)[M].4版. 劉郁林,陳紹榮,徐舜,譯. 北京:電子工業(yè)出版社,2017.
[14] ? KANDEPU R,F(xiàn)OSS B,IMSLAND L. Applying the unscented kalman filter for nonlinear state estimation[J]. Journal of Process Control,2008,18(7-8):753-768.
Abstract: The estimation method of the state of charge (SOC) of single lithium-ion phosphate power battery is studied. The battery model is given by the second-order RC equivalent circuit, and the range of the parameters of the equivalent circuit model is obtained by the charging/discharging current pulse experiment. According to the state equation of the battery model, the unscented Kalman filter (UKF) method is used to estimate the SOC of lithium-ion batteries by using MATLAB software. The results of SOC estimation are compared with that of the extended Kalman filter (EKF) method. The experimental results show that UKF method can estimate the SOC of lithium-ion batteries more accurately.
Key words: lithium-ion battery; unscented Kalman filter; extended Kalman filter; SOC estimation
(責(zé)任編輯:黎 ?婭)
