基于K鄰近算法的轉向架構架狀態識別研究
2019-09-12 09:06:52
測控技術 2019年8期
(1.華東交通大學 機電與車輛工程學院,江西 南昌 330013;2.常州信息職業技術學院 機電工程學院,江蘇 常州 213164)
機車在運行過程中,由于頻繁地隨機交變載荷帶來的影響,列車轉向架結構件可能會出現故障,進而導致運行品質下降,甚至會導致脫軌翻車等嚴重安全事故的發生。轉向架構架故障的準確診斷可以減少或杜絕事故的發生,有利于運維人員對轉向架構架的實時監測與狀態把握,針對不同狀態施行相應舉措,最大限度延長轉向架的使用壽命,對機車的安全運行具有很重要的意義。
迄今為止,轉向架構架的故障診斷方向研究較少,而轉向架整體的故障診斷與轉向架軸承的故障診斷已經有比較成熟的分析方法。目前應用較為廣泛的轉向架整體的故障診斷方法包括支持向量機、故障識別搜索、BP 神經網絡、專家系統、隱馬爾可夫模型、Adaboost 等算法[1]。轉向架軸承故障診斷的方法應用最為廣泛的是采用振動信號進行診斷,振動信號的分析方法主要有兩種:時域法和頻域法[2]。文獻[3]采用沖擊脈沖方法和共振解調法進行軸承的故障檢測。文獻[4]提出一種采用支持向量機進行轉向架故障狀態的分類識別的方法。文獻[5]采用故障樹分析法對轉向架軸承常見的故障類型及產生原因進行分析。文獻[6]則將小波包分解和集合經驗模態分解結合在一起進行軸承故障診斷。文獻[7]利用極限學習機訓練速度快且泛化能力強的特點,提出了一種基于半監督極限學習機的滾動軸承故障診斷方法。文獻[8]提出了一種基于小波包與自適應遺傳算法優化最小二乘支持向量機相結合的故障診斷模型,解決滾動軸承故障特征提取和故障類型識別問題,提高診斷準確率。文獻[9]提出一種基于振動特征的軌道車輛轉向架牽引電機滾動軸承可靠性評估方法,從而對電機軸承運行可靠性提供了有效的評估。文獻[10]依據深度學習的降噪自動編解碼過程對故障的頻域信號進行特征學習,并以此特征作為BP神經網絡的輸入實現轉向架故障信號的識別。文獻[11]通過對監測數據特征提取的分析,建立特征提取知識庫,構建了故障診斷決策模型,并通過改進的粒子群優化算法優化支持向量機參數。文獻[12]深入地研究了基于小波變換的微弱信號探測理論、算法仿真及算法在DSP中的實現,并通過不斷地優化改進了信號處理過程。文獻[13]利用高斯混合模型GMM將訓練樣本數據分為K類得到樣本的K鄰近樣本馬氏距離和,將其作為故障檢測的指標。文獻[14]提出一種基于K鄰近 (KNN)的多標簽分類去噪方法。
上述文獻均為基于轉向架整體或者轉向架軸承的故障診斷與識別方法,或是利用KNN算法對其他對象的識別方法,但對于轉向架構架的狀態識別還有待進一步研究。本文提出了一種計算量小、簡便的轉向架構架狀態識別方法。選取對機車轉向架起決定性影響的關鍵部件——構架為研究對象,通過噪聲與加速度傳感器獲取激振器運行時與轉向架構架接觸產生的各種重要信號,并對采集到的激振數據信號進行分析和處理,提取轉向架構架的關鍵特征,進而構建K鄰近算法識別模型,利用模式識別方法,對轉向架構架的三種不同狀態(正常、小裂紋、大裂紋)進行識別,對轉向架構架狀態進行預測及可靠性評估,對保障高速列車安全可靠運行和及時維修養護具有十分重要的意義。
1 狀態識別算法
1.1 基本原理
K鄰近算法簡稱KNN算法,其思路非常簡單直觀,易于快速實現,具有失誤率低的優點。所謂KNN,就是K個最近的鄰居的意思,說的是每個樣本都可以用它最接近的K個鄰居來代表。
KNN是通過測量不同特征值之間的距離進行分類。它的思路是:如果一個樣本在特征空間中的K個最相似(特征空間中最鄰近)的樣本中的大多數屬于某一個類別,則該樣本也屬于這個類別[15]。該方法在確定分類決策上只依據最鄰近的一個或者幾個樣本的類別來決定待分樣本所屬的類別,只與極少量的相鄰樣本有關,而不是靠判別類域的方法來確定所屬類別的,因此對于類域的交叉或重疊較多的待分樣本集來說,KNN方法較其他方法更為適合。
1.2 算法步驟
KNN算法的算法步驟如下:
① 計算測試數據與各個訓練數據之間的距離并按照距離的遞增關系進行排序;
② 取距離最小的K個點并確定所在類別的出現頻率;
③ 返回前K個點中出現頻率最高的類別作為測試數據的預測分類。
1.3 相似性度量
用空間內兩個點的距離來度量。距離越大,表示兩個點越不相似。距離的選擇有很多,通常用比較簡單的歐式距離deuc(a,b),計算公式如下:
(1)
式中,d表示d維空間;aj表示a在第j維下的坐標;bj表示b在第j維下的坐標。
1.4 K值的設定
K值一般是根據經驗規則進行設定的。
經驗規則:K一般低于訓練樣本數的平方根。K值選擇過小,得到的近鄰數過少,會降低分類精度,同時也會放大噪聲數據的干擾;而如果K值選擇過大,并且待分類樣本屬于訓練集中包含數據數較少的類,那么在選擇K個近鄰的時候,實際上并不相似的數據亦被包含進來,造成噪聲增加而導致分類效果的降低。
2 實驗方案設計
為了驗證K鄰近算法對轉向架構架識別的有效性,搭建了轉向架構架試驗平臺。依據文獻,曾琦[16]發現對轉向架運行狀態進行故障診斷時,其振動信號與噪聲信號有著特征明顯、易于檢測等顯著優勢,故選擇加速度數據與噪聲數據作為診斷數據。采用多傳感器獲取這些運行參數,并由數據采集卡輸入PC機中進行信號分析和處理,進而提取狀態特征,由模式識別方法進行狀態識別。在此基礎上,搭建實驗平臺。設計方案如圖1所示。整體實驗裝置包括信號發生器、功率放大器、激振器、加速度傳感器、噪聲傳感器、數據采集卡和PC機。模擬實驗平臺如圖2所示。掃頻信號發生器輸出端接功率放大器AC口,功率放大器Output口接激振器,加速度傳感器接到采集卡2、3口(IEPE),噪聲傳感器接到1口(IEPE),采集卡接到PC機。
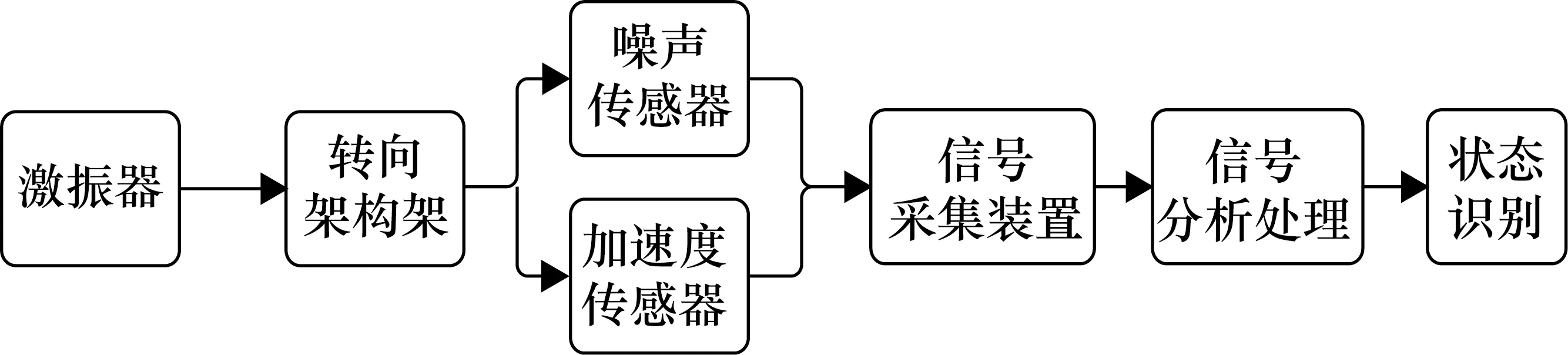
圖1 設計方案示意圖

圖2 轉向架構架運行狀態監測模擬實驗平臺
實驗中所用轉向架構架尺寸如下:頂板與底板長30 cm,寬20 cm;頂板與底板之間高度20 cm;中間支撐板為梯形板,上底長21.5 cm,下底長25.5 cm,兩支撐板之間距離為15 cm。板材厚度均為1.3 cm。根據動車組轉向架三級檢修標準,原則上構架表面存在寬度小于或等于鋼板厚度10%的裂紋時,須對裂紋部位進行打磨消除、圓滑過渡;當裂紋寬度大于鋼板厚度10%時須焊修。構架表面關鍵焊縫(新造時要求探傷的焊縫)須進行外觀狀態檢查,目視發現裂紋等缺陷時須焊修,焊修后須探傷檢查[17]。即小裂紋狀態時僅需打磨消除裂紋,而大裂紋狀態時必須焊修才可消除裂紋保證其正常工作。因本文采用轉向架構架板材厚度為1.3 cm,故本文定義小裂紋寬度為1 mm,大裂紋寬度為2 mm。
進行實驗操作時,先采用掃頻儀產生振動信號,再經功率放大器將信號放大,傳入到激振器中,激振器產生振動,其頂桿與結構件側板接觸,從而激起模型的振動,分別在底板和頂板放置加速度傳感器,其旁放置噪聲傳感器,最后接入數據采集卡,從而將調理后的振動與噪聲模擬信號轉換成數字信號,最后在PC機中采集。
數據采集時設置采樣率為12 kHz,采樣時間為10 s。圖2中實驗構架狀態分為3種:正常、小裂紋、大裂紋。實驗中所用正常狀態構架細節如圖3所示,小裂紋狀態構架細節如圖4所示,大裂紋狀態構架細節如圖5所示。
為保證隨機性,在不同時間段采集數據,共采集到5個不同時間段的數據。激振器激振頻率范圍設置為100~2500 Hz,間隔100 Hz,共25種激振頻率。故轉向架構架每種狀態不同激振頻率下共采集125組數據,3種狀態共采集375組數據。將數據進行分組后用于后續數據處理與狀態識別,分組情況如表1所示。

圖4 小裂紋狀態構架細節圖

圖5 大裂紋狀態構架細節圖

訓練(組)測試(組)正常7550大裂紋7550小裂紋7550
3 特征提取與狀態識別
3.1 特征提取
根據傳感器提取到的噪聲數據與加速度數據,隨機選取一組頻率(激振頻率為500 Hz)時采集到的正常、小裂紋、大裂紋3種狀態下的噪聲數據與加速度數據分別做出其時域分析圖如圖6、圖7所示。

圖6 激振頻率500 Hz下不同狀態噪聲數據時域圖

圖7 激振頻率500 Hz下不同狀態加速度數據時域圖
圖6顯示,正常狀態下噪聲波形幅值較小,且有較多毛刺;當構架上出現小裂紋時,噪聲波形幅值增大,毛刺減少;當構架上出現大裂紋時,噪聲波形幅值介于正常狀態與小裂紋狀態之間,波形平穩。圖7顯示,正常狀態下,波形較為規律,呈現出較明顯的波動;當構架上出現小裂紋時,數據波形幅值變化不大,但波形上無明顯波動;當構架上出現大裂紋時,數據波形幅值明顯減小,出現較多毛刺,波形不平穩。為了更明顯地區別三種狀態,對轉向架構架進行狀態識別,對采集到的噪聲信號數據與加速度信號數據進行時域分析,提取出包括最大值、最小值、峰峰值、平均值、方差、標準差、峭度、均方根8種時域特征。從中選取出較為敏感的特征:峰峰值、方差與峭度作為狀態識別時的時域特征,將噪聲數據下的時域特征記為:Ipk1,Ivr1,Iku1,將加速度數據下的時域特征記為:Ipk2,Ivr2,Iku2。峰峰值是指信號最高值和最低值之間差的值,就是最大和最小之間的范圍,它描述了信號值的變化范圍的大小;方差描述的是信號的波動范圍;峭度是無量綱參數,由于它與軸承轉速、尺寸、載荷等無關,對沖擊信號特別敏感,特別適用于表面損傷類故障、尤其是早期故障的診斷。
隨機選取一組頻率(激振頻率為500 Hz)時采集到的正常、小裂紋、大裂紋3種狀態下的噪聲數據與加速度數據分別進行三層小波包分解,做出其時頻域能量譜圖如圖8、圖9所示。
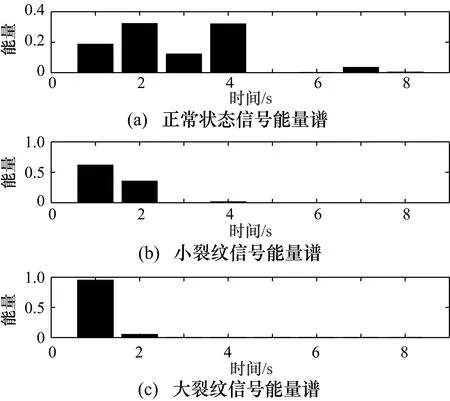
圖8 激振頻率500 Hz下不同狀態噪聲數據時頻域能量譜圖

圖9 激振頻率500 Hz下不同狀態加速度數據時頻域能量譜圖
圖8顯示,3種狀態下噪聲數據經時頻域處理后其信號能量均在低頻段時比較大,正常狀態下前4個頻段均有明顯的小波包能量值,小裂紋狀態下僅在前兩個頻段其小波包能量比較明顯,而當構架出現大裂紋時,其小波包能量譜與正常狀態、小裂紋狀態均有較大差別,僅在最低頻段下有明顯且較大的小波包能量。圖9顯示,3種狀態下的加速度數據經時頻域處狀態下前4個頻段與第7個頻段、小裂紋狀態下前兩個頻段、大裂紋狀態下第一個頻段的小波包能量值較大。兩圖均顯示3種狀態下噪聲數據、加速度數據時頻域能量譜圖有較大差別,將噪聲數據下的時頻域特征記為:Isp11,Isp12,Isp13,Isp14,Isp15,Isp16,Isp17,Isp18,將加速度數據下的時頻域特征記為:Isp21,Isp22,Isp23,Isp24,Isp25,Isp26,Isp27,Isp28。為對3種不同狀態進行識別,選取噪聲數據與加速度數據下前4個頻段的小波包能量作為狀態識別時的時頻域特征,即Isp11,Isp12,Isp13,Isp14,Isp21,Isp22,Isp23,Isp24。
最終組合敏感特征為:I=[Ipk1,Ivr1,Iku1,Ipk2,Ivr2,Iku2,Isp11,Isp12,Isp13,Isp14,Isp21,Isp22,Isp23,Isp24]作為狀態識別特征。各敏感特征對應物理意義如表2所示。

表2 敏感特征矩陣對應物理意義
3.2 狀態識別
提取激振頻率為100~2500 Hz內(頻率間隔為100 Hz)的25個頻率下的數據,每種激振頻率下不同時間段共采集5組數據,將采集到的數據分為兩部分,每種頻率下的前3組數據作為訓練樣本,正常狀態、小裂紋狀態、大裂紋狀態分別有75組數據,共225組數據,后2組作為測試樣本,正常狀態、小裂紋狀態、大裂紋狀態分別有50組數據,共150組數據。提取訓練樣本中2種不同傳感器下的3種不同時域特征值:峰峰值、方差與峭度與時頻域特征值:4個小波包能量敏感特征,組成維度為225×14的矩陣作為訓練集;提取測試樣本中兩種不同傳感器下的3種不同特征值(峰峰值、方差與峭度)與時頻域特征值(小波包能量),組成維度為150×14的矩陣作為測試集。規定轉向架構架正常狀態、小裂紋狀態,大裂紋狀態對應標簽分別為00,01,10,建立訓練標簽集[00,…,00,01,…,01,10,…,10]與測試標簽集[00,…,00,01,…,01,10,…,10]。設置相似性度量為歐氏距離。將每種狀態下的訓練集通過KNN算法進行訓練優化,再對測試集進行狀態識別,識別結果數字分別對應轉向架構架的三種不同狀態。
對于K值的選取,由于K一般低于訓練樣本數的平方根,本實驗中即為K不大于15,通過交叉檢驗的方式,將K不同取值下識別率進行對比,識別率結果如表3所示。

表3 不同K值下識別率結果
根據表3中K不同取值下的不同識別率結果,發現K=1時識別率最高,但由于K取1時僅取距離最近的一個鄰居的類別作為識別結果,此方式隨機性太高,綜合考慮識別率及隨機性問題,選擇識別率次之的K=3作為最終識別時的取值。最終識別結果如表4所示。

表4 各狀態識別結果
表4中,加粗的數字表示錯誤識別后的結果,未加粗的數字表示識別結果正確。表4顯示所有150個識別結果中,僅有11個錯誤識別的結果,最終識別率為93.33%。由于轉向架構架正常、小裂紋及大裂紋狀態下特征具有一定的相似度,該識別結果會出現一定的錯誤。在正常狀態下的識別出現失誤較多,識別為小裂紋、大裂紋狀態均有出現;小裂紋狀態下僅會錯誤識別為大裂紋狀態;大裂紋狀態下僅會錯誤識別為小裂紋狀態。
為體現KNN算法對轉向架構架狀態識別的優勢與先進性,針對同樣的測試集和訓練集,利用最小二乘支持向量機(LSSVM)方法對轉向架構架三種不同狀態進行識別,識別結果如表5所示。

表5 利用LSSVM方法的識別結果
表5中,加粗的數字表示錯誤識別后的結果,未加粗的數字表示識別結果正確,-Inf代表未識別出結果。表5顯示所有150個識別結果中,有28個錯誤識別結果,最終識別率為81.33%。
經過兩種方法識別結果的對比,可以看出,KNN算法得到的最終識別結果優于LSSVM方法,可以得到更為準確的識別率。LSSVM方法適用于特征量較少的樣本進行識別,本文中所需進行識別的樣本集最終提取出了14個特征,故利用LSSVM方法對本文3種狀態進行識別不能得到很好的識別效果。最終結果表明,利用KNN算法進行轉向架構架的狀態識別可以得到較為準確的識別結果,相比LSSVM方法具有一定的優勢。
4 結束語
為了對轉向架構架裂紋進行狀態識別,本文以不同狀態轉向架構架裂紋為研究對象,提出了一種利用KNN算法對轉向架構架狀態進行識別的方法,設計了轉向架構架運行狀態參數測量實驗裝置,通過多個傳感器獲取了轉向架構架的各種重要信號:噪聲信號與加速度信號,并對采集到的信號進行了分析和處理,提取了轉向架構架的噪聲與加速度敏感特征,進而構建了K鄰近算法識別模型,利用模式識別方法,對轉向架構架的3種不同狀態(正常、大裂紋、小裂紋)進行了識別,識別較好。識別結果表明,利用KNN算法進行轉向架構架狀態識別是可行的。KNN算法簡單,易于實現,無需估計參數,適合于多分類問題,但在對測試樣本分類時要掃描全部訓練樣本并計算距離,導致系統內存占用量大;在樣本數過大的情況下識別準確性可能降低,因此改進的K鄰近算法有待進一步研究,如增加頻域特征或采用模態區間方法等。
猜你喜歡
艦船科學技術(2022年13期)2022-08-11 09:29:16
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
哈爾濱鐵道科技(2020年4期)2020-07-22 02:22:28
制造技術與機床(2019年12期)2020-01-06 03:17:46
World Journal of Diabetes(2019年7期)2019-07-23 11:52:08
西南交通大學學報(2018年5期)2018-11-08 10:58:26
電子制作(2018年11期)2018-08-04 03:25:42
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
鐵道運營技術(2015年3期)2015-12-23 09:27:14
