無信號公路交叉口事故預警防撞系統
2019-09-18 06:50:32崔梓鈺
城市道橋與防洪 2019年9期
崔梓鈺
(山東建筑大學,山東 濟南 250101)
0 引言
近年來,隨著機動車保有量逐年攀升,交通事故的發生率也逐年升高。由于無信號交叉口沒有信號燈,在交叉口會車時,駕駛員必須憑借自身的經驗來判斷是否通過交叉口,而當駕駛員的主觀判斷出現錯誤或違反了交通安全法規時,相比有信號控制交叉口的情況下,無信號交叉口的事故發生概率急劇增大。據資料[1]顯示,美國城市車輛交通事故的55%發生在交叉口,鄉村車輛交通事故的32%發生在交叉口;中國城市的交通事故大約30%發生在平面交叉口。
因此很有必要研發一種無信號燈公路交叉口事故預警防撞系統,在車輛發生事故前發送預警信息進行有效的碰撞危險規避,保障車輛在無信號燈公路交叉口行駛的安全性。
1 系統簡介
“無信號燈公路交叉口事故預警防撞系統”旨在為行至無信號燈公路交叉口的車輛提供安全的行駛方案,達到所有車輛安全通過路口,避免車輛碰撞的效果。系統主要分為微波車輛檢測雷達、中央信息處理系統、結合ZigBee無線通訊技術和語音播報技術的車內飾件三部分(見圖1)。微波車輛檢測雷達設置在駛進路口方向的路旁,來檢測車輛速度;中央處理系統作用為接收兩沖突方向車輛速度信息,經過編入的沖突消解優化算法,得出雙方車輛安全通行方案;車內飾件系統作用為通過ZigBee無線通訊接收中央處理系統得出的通行方案,并反饋至車輛,通過語音播報告知駕駛員,播報結果分為以下兩種“請保持勻速行駛”、“請減速慢行”,以最直觀,最簡潔的告知方式使駕駛員準確地、安全地順利通過交叉口而不發生交通事故。
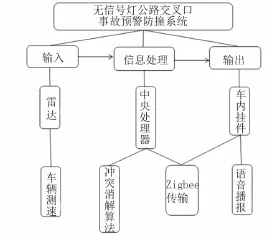
圖1 無信號燈公路交叉口事故預警防撞系統系統組成
2 設計思路
本作品主要研究在公路存在的無信號燈交叉口,將交叉方向分為主路和支路,由于主路車流量大車速快,支路車流量小車速慢的特點,為提高道路通行效率和安全指數,確定以“支路服從主路”的原則,通過在主路道路一側設置微波車輛檢測雷達,檢測主路方向來車速度,經過車輛沖突消解速度優化方法得出最佳通行方案,即最終雙方車輛能夠安全通過不發生事故的小路車輛做出的減速變化,將此方案信息傳遞至小路車內掛件接收器進行預警,從而達到司機主動規避危險、減低事故率的效果。
3 系統工作流程
車輛進入雷達區域:當車輛進入雷達探測區域即進入紅色圓邊界時,雷達開始檢測車速;雷達探測的信息通過ZigBee通訊技術實時傳遞給中央處理器,中央處理器經過沖突消解算法程序的運行得出最佳通行方案;利用ZigBee通訊技術將方案信息傳遞至車內掛件,進行語音播報,播報結果為:“請保持勻速行駛”、“請減速慢行”。
4 區域及設備布置
“無信號燈公路交叉口事故預警防撞系統”的實現可由圖2進行區域及設備設置說明。
4.1 區域設置說明
(1)小圓區域:交叉口沖突分為合流沖突和交叉沖突,兩車道十字交叉口存在12個合流沖突點與16個交叉沖突點。由于支路寬度較小,而沖突點較多,特設置綠色圓區域作為沖突點的集中區域,將所有沖突點看為一個沖突點,此處不再分合流沖突與交叉沖突。
(2)大圓區域:為給整個系統運行留出充足時間,以及駕駛員接收信息后,能夠穩定安全的做出減速反應,特設置紅色圓緩沖區域。同時為減小綠色圓半徑帶來的誤差,特將紅色圓域半徑設置為150 m。
4.2 設備布置說明
(1)中央處理器:設置于路口中心位置,便于接收、反饋各方向信息。
(2)雷達:設置于圖中紅色圓與道路交叉點,以探測速度后進行后續系統的工作實施,為車輛做出減速反應留出適當的緩沖時間。
(3)車內掛件:以車輛為載體,以普通車內飾件外觀包裝,設置于車內,作為接收方案和反饋方案系統,有效地將結果傳遞給駕駛員,為其提供判斷依據。
5 沖突消解方案設計
5.1 系統設計原則
為提高無信號燈公路交叉口道路通行效率和安全指數,確定以“支路服從主路”的思想。下文設計的沖突消解方案以此思想為前提,全部使小路車輛做出減速反應,而使主路車輛保持勻速。由于車內飾件置于每輛車內,中央處理系統根據車輛所在位置(主路或小路),判斷發送信號。
由于支路道路狹窄且,車流量小,通過對身邊駕駛員的走訪調查,得知由于無信號燈控制加上支路路標設置不嚴謹,駕駛員可能會在多車道出現亂道現象,因此這里將支路當做一車道(單向)處理;主路為多車道,本作品研究以主路路面存在一車和兩車情況進行研究,多車情況類似。
5.2 方案設計
5.2.1 兩個方向的車同時到達雷達接受信號范圍邊界(見圖3)
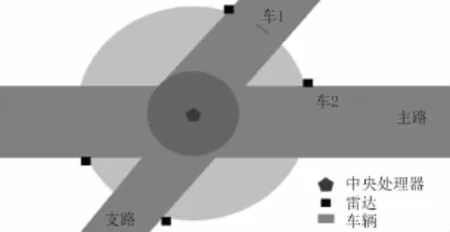
圖3 兩個方向的車同時到達雷達接受信號范圍邊界
(1)支路一車主路一車(設主路車速為v1,設支路車的速度為v2)(見圖4)
a.v1=v2:支路服從主路,讓支路上的車v2減速,主路上的車以v1保持原速度通過。
b.v1≠v2:兩車不會發生沖突,均保持原速度通過即可。
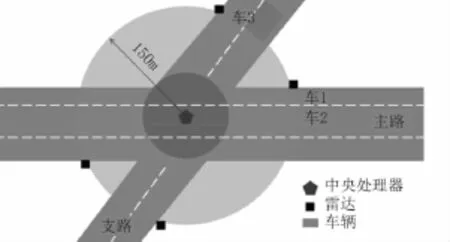
圖4 支路一車主路一車
(2)支路一車,主路兩車(多車同理)(主路車速為 v1、v2,支路車速為 v3)
a.v1=v3:
v2=v3時,令支路v3減速,v1、v2保持原速度通過。
v2>v3時,令支路v3減速,v1、v2保持原速度通過。
v2<v3時,令支路v3減速但不減至v2,v1、v2保持原速度通過。
b.v1>v3:
v2=v3時,令v3減速,v1、v2保持原速度通過。
v2>v3時,各路車輛v1、v2、v3均不用改變速度。
v2<v3時,各路車輛v1、v2、v3均不用改變速度。
c.v1<v3:
v2=v3時,令支路v3減速但不減至v1,v1、v2保持原速度通過。
v2>v3時,各路車輛v1、v2、v3均不用改變速度。
v2<v3時,各路車輛v1、v2、v3均不用改變速度。
5.2.2 兩個方向的車不同時到達雷達接受信號范圍邊界
(1)車1先進入雷達接受信號范圍邊界
a.v2≤v1時,各路車輛v1、v2均不用改變速度。
b.v2>v1時,令支路v2減速至v1,v1保持原速度通過。
(2)車2先進入雷達接受信號范圍邊界
a.v1>v2時,令主路v1減速,v2保持原速度通過。(為確保安全,此處使主路車輛減速,是唯一不服從“支路服從主路”思想的一種情況)
b.v1≤v2時,各路車輛v1、v2均不用改變速度。
6 可行性分析
對于較城市中心偏遠的不繁華的國道、省道以及城鎮公路,大量投入高科技信息設備經濟效益不高,在這種情況運用一些小型信息科技產品便能發揮其作用。目前我國有640多個城市,每個城市平均有40~50個路口需要監控,市場空間廣闊。
測速以及計算系統技術成熟,主要應用雷達測速系統,利用多普勒效應原理,對運動車輛產生的多普勒頻率進行頻譜分析,并計算出其行駛速度。現在的雷達測速技術比較成熟,國內外均有較精確的雷達測速系統。
司機接收信號系統(反饋機制)簡易美觀:信號接收裝置設計為一個小型吊墜,語音播報從雷達接收的信號,司機根據提示進行降速或正常行駛。
7 結 語
本系統檢測裝置主要采用較為常見且價格較實惠的雷達系統,計算機上的算法處理系統,以及位于車內的信息反饋系統,整個系統成本較低,適用于在較為偏僻的公路路口安裝。并且能較準確的完成主路車流量狀況、次路車流量狀況、次路車輛參數(距離、速度、加速度等)等信息的采集。信息的處理過程盡可能優化:在中央處理系統,將信息采集子系統采集到的人、車、路的信息加以篩選、分析。通過具體算法的計算,得出詳盡的引導策略,信息的表達途徑清晰明確。
減少無信號燈公路交叉口會車的車輛之間的沖突,在一定程度上減少了因為沒有信號燈控制而引起的交通事故,達到駕駛員能夠主動準確規避事故危險的目的,保障車輛在無信號燈公路交叉口行駛的安全性。有利于保障民眾的出行安全,降低無信號公路的事故率,提升道路運輸的安全性,又能有效改善道路環境,對推動當地交通現代化、夯實其經濟發展基礎具有重大意義。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
商品與質量(2021年43期)2022-01-18 05:31:32
石油瀝青(2021年4期)2021-10-14 08:50:40
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
人民交通(2019年16期)2019-12-20 07:04:10
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45