多星博弈攔截Nash和Pareto策略研究*
2019-09-19 10:05:10徐東宇王淳寶
航天控制 2019年4期
徐東宇 王淳寶 趙 碩 葉 東
1.哈爾濱工業大學航天學院,哈爾濱150001 2.中國空間技術研究院,北京100094 3.航天東方紅衛星有限公司,北京100094
隨著科技的發展,未來戰場態勢必將越來越復雜,而衛星作為空間力量的重要組成部分,在提供戰場信息時具有傳送信息量大、不受地形限制等優點[1],為了奪取空間信息主動權,對敵方衛星實施攔截打擊有著重要意義。
針對攔截問題,文獻[2]基于滑模面進行了導彈的制導與控制一體化設計,仿真表明了采用所設計的控制方法能夠滿足攔截要求。馮[3]分析了視線角和視線角速度對動能攔截器末制導的影響,通過劃分參數域,給出了攔截域和突防域的分布,分析了參數對其影響。賴[4]考慮目標進行程序機動時的攔截策略,基于動態面和擴張狀態觀測器對制導與控制進行了設計,仿真分析了目標在進行正弦機動時,采用相應的控制策略能夠實現對目標的精確攔截。李[5]分別研究了攔截衛星的中制導和末制導方法,基于Lambert軌道轉移設計了中制導策略以接近衛星,完成交班后進入末制導過程,采用滑模控制策略實現精確攔截。雖然上述文獻對目標攔截問題均進行了研究,但并未考慮目標的機動性,且僅考慮單個攔截器。而隨著科技的發展,目標可以進行自主決策,采取相應的策略以應對不同的戰場態勢,此時攔截策略的設計需要考慮目標的最優機動性,傳統的單邊攔截策略已不再適用,此時為了實現可靠攔截,通常需要多顆攔截器,因此研究多攔截器的合作攔截策略有著重要的意義。
針對博弈攔截問題,學者們已經進行了充分的研究。文獻[6]中作者以小車模擬導彈攔截態勢,基于深度確定性策略梯度算法設計了追逃策略,該方法能夠實現對目標的有效攔截,具有較強的自適應性。Horie[7]等基于飛機三維動力學模型,通過微分對策理論將優化攔截問題轉化為兩點邊值問題,通過仿真得出,最優飛行軌跡分為偏離垂直平面以及垂直面內運動2個階段。當攔截器距離目標較近時,攔截過程進入末端攔截,針對航天器末端攔截問題,Prussing[8-9]等應用主矢量理論分別研究了多脈沖逃逸策略以及攔截策略。文獻[10]考慮航天器攔截目標后返回原軌道的情況,通過在目標函數中引入一個參數k對路徑進行約束。Gutman S[11]在雙積分動力學模型的基礎上,以終端相對距離為指標建立了攔截器與目標的控制策略,分別給出了在極坐標、球坐標下的策略形式。文獻[12-13]在給出攔截器與目標控制策略的基礎上,建立了關于攔截剩余時間的一元四次方程,以求解終端攔截時間,并討論了方程的分叉現象。文獻[14]考慮攔截過程中視線角測量存在噪聲的情況,通過狀態觀測器對其進行估計,再將其應用于控制策略。對于多星合作博弈問題,LIU[15]考慮2枚導彈攔截同一目標,在簡化的導彈動力學模型基礎上,通過Nash均衡集設計最優加速度方向,即最優制導率。文獻[16-17]中均以平面雙積分系統為模型,通過可達集設計合作攔截時的最優策略。文獻[18]中假設攔截器與目標速度不變,基于阿波羅尼圓設計初始速度方向角以實現最優攔截。
對于航天器末端攔截問題,雖然已經存在較多的研究,但大多局限于雙星博弈或簡化模型的多星博弈,與實際情況相差較大。針對多星博弈攔截問題進行研究,分別推導了各攔截器非合作的Nash反饋策略,以及合作的Pareto反饋策略。
文章安排如下:1)建立末端攔截動力學模型;2)以終端零控脫靶量為指標推導了各攔截器非合作態勢的Nash均衡解;3)推導了各攔截器以合作方式態勢進行攔截的Pareto均衡解;4)將博弈策略應用于多星博弈攔截,并進行了仿真分析。
1 末端攔截動力學模型
末端攔截過程中,攔截器與目標距離較近,因此在攔截器附近建立參考衛星,如圖1,其中O為地心;O1為參考衛星;P為攔截器。設參考衛星運行在圓軌道,則在軌道坐標系下,攔截器相對參考衛星的動力學方程可簡化為CW方程

(1)
式中:x,y和z為攔截器相對參考衛星的位置;ω為參考衛星的軌道角速度;ux,uy,uz分別為攔截器的控制輸入。
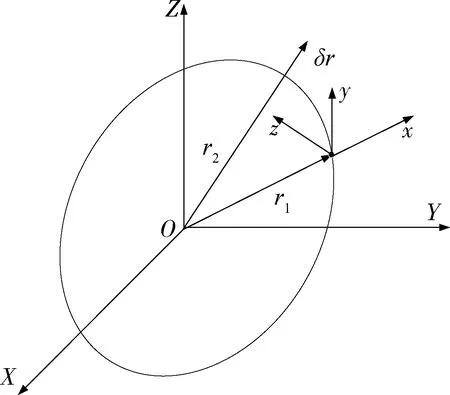
圖1 攔截器與參考衛星

(2)

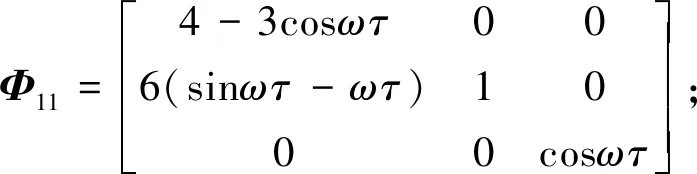
由線性系統理論可得狀態轉移矩陣為
(3)
其中,子矩陣分別為[19]

設末端攔截段存在N個攔截器P1,…,PN與目標,其動力學均滿足CW方程,即

(4)

分別定義攔截器P1,…,PN與目標的相對狀態
XPiE=XPi-XEi=1,…,N
對其求導并將式(4)代入,可得相對狀態方程

(5)
在多星攔截過程中,攔截器與目標圍繞攔截終端距離展開爭奪,因此僅需考慮星間的位置矢量[20]。分別定義攔截器P1, …, 攔截器PN與目標的零控脫靶量,對系統進行降維
ZPiE(t)=DΦ(tfi,t)XPiE其中,i=1,…,N
(6)

對式(6)求導,并結合可得

(7)
式中:BPi=DΦ(tfi,t)B=Φ12(tfi,t);CEi=-DΦ(tfi,t)C=-Φ12(tfi,t)。
對于多星博弈問題,根據各航天器是否合作攔截,將其分為Nash均衡策略和Pareto均衡策略。
2Nash博弈策略設計


(8)

對于航天器攔截問題,要求在有限時間內使目標進入某一攔截器的攔截范圍,因此各攔截器的指標函數定義為其與目標的終端零控脫靶量范數。
根據Nash均衡定義,分別定義攔截器Pi(i=1,…,N)和目標的指標函數如下
(9)
(10)

(11)

(12)

(13)
其中:ki(i=1,…,N)代表了目標對各攔截器的博弈程度:
若ki>kj(j={1,…,N}i), 則目標主要與攔截器Pi進行博弈,即主要躲避Pi;
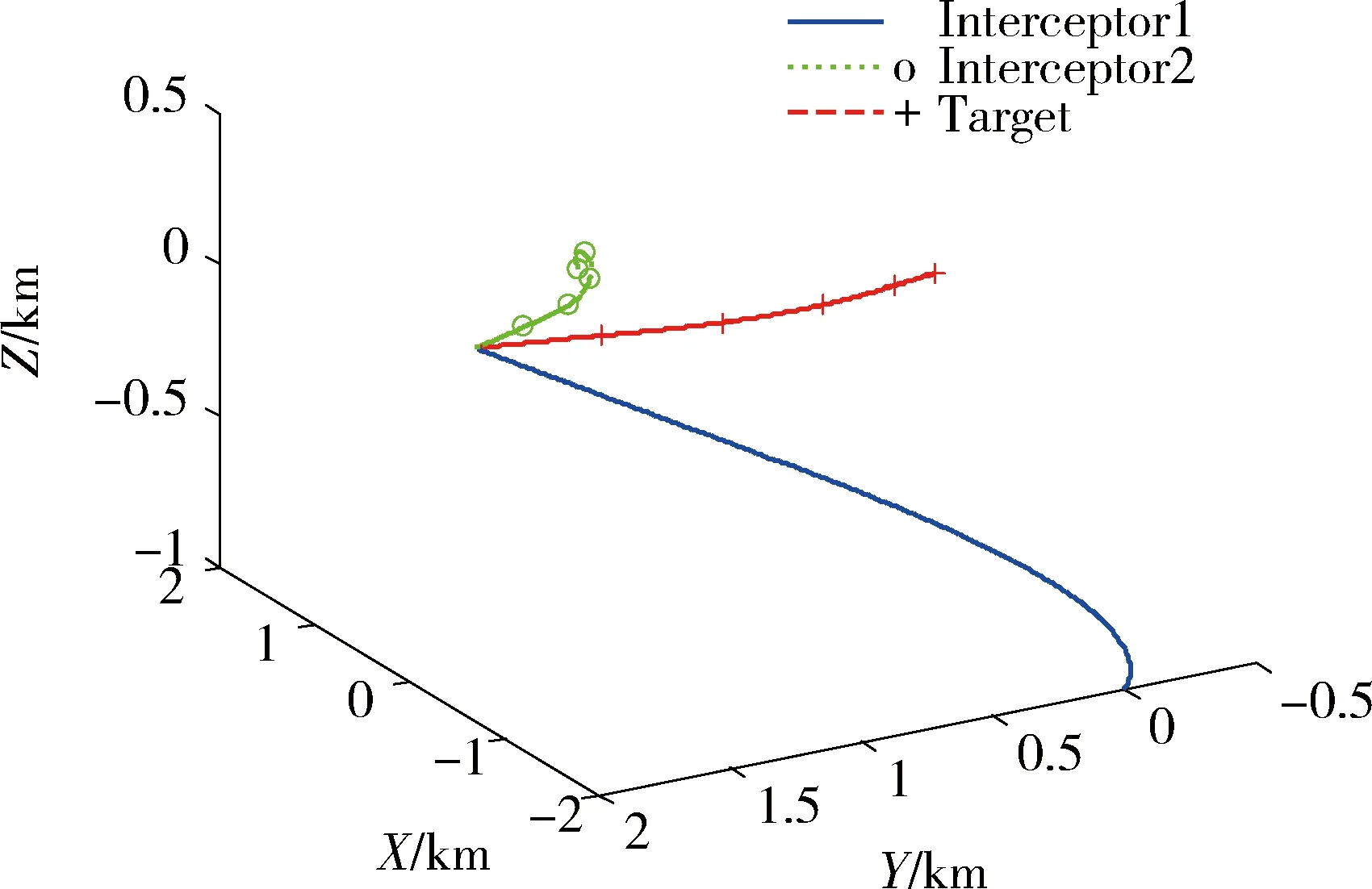
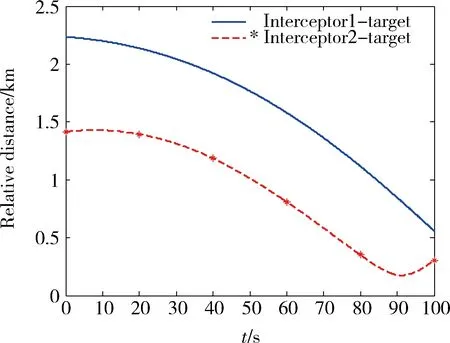
若ki 若ki=kj(j={1,…,N}i), 則目標進行無差博弈,即同等程度躲避攔截器Pi和Pj。 通過Nash反饋策略,各航天器雖然可以達到均衡態,但由于并非合作關系,攔截系統可能并未達到最優狀態,因此對于多星博弈問題,設各攔截器采取合作策略,使系統達到Pareto均衡。 (14) 對于Pareto均衡,攔截器的優化指標為式(9)的凸組合,即 (15) (16) 其中,ki(i=1,…,N)定義與第2節相同 (17) (18) 類似地,目標的控制策略UE仍為 (19) 通過比較Nash反饋策略式(12-13)和Pareto反饋策略式(18-19)可知,攔截器無論采取合作或非合作攔截方式,其博弈策略均相同,即各攔截器采取非合作方式,即可達到合作攔截的目的。 由于合作與非合作策略相同,因此只對合作態勢下的多星博弈攔截問題進行仿真。 考慮2顆攔截器進行仿真,初始條件如下:假設攔截器P1和P2及目標均在地球同步軌道附近運動,則將參考衛星選為GEO軌道上與其相近的衛星,軌道角速度為ω=7.2722×10-5rad/s。攔截器P1初始位置為[-2;0;1]km,初始速度為[0;-0.005;0.005]km/s;攔截器P2的初始位置為[1;1;0]km,初始速度為[0.01;0;0.005]km/s;目標的初始位置為[0;0;0]km,初始速度為[0;0.005;0]km/s。設攔截器P1的推力幅值為ρP1=0.686m/s2,攔截器P2的推力幅值為ρP2=3/2ρP1m/s2,目標的推力幅值為ρE=1/2ρP1m/s2。此外,設攔截器的攔截半徑l=0.01km。 1) 合作博弈態勢。設終端攔截時間tf=100s,且目標的綜合權重為k1=0.5,k2=0.5。 圖 2給出了各航天器的運動軌跡,圖3繪制了博弈過程中各攔截器與目標之間相對距離的變化情況。可以看出,在100s時,攔截器P1和P2與目標的相對距離均達到了0,滿足攔截要求,即實現了對目標的攔截。 圖2 多星博弈的三維運動軌跡 圖3 多星博弈的相對距離變化 2)目標綜合權重對攔截的影響。設終端攔截時間tf=100s,目標綜合權重為k1=0.8,k2=0.2,此時目標主要躲避攔截器P1。 圖4和5分別給出了三星的運動軌跡,以及相對距離的變化情況。可以看出,由于目標主要對推力幅值較大的攔截器P1進行躲避,導致在100s的終端時間條件下,攔截任務失敗,此時只能通過延長攔截時間實現對目標的攔截。 圖4 多星博弈的三維運動軌跡 圖5 多星博弈的相對距離變化 針對多星博弈末端攔截問題,分別考慮了多攔截器非合作與合作態勢下的攔截策略,基于Nash均衡建立了非合作博弈策略,基于Pareto均衡建立了合作博弈策略。通過比較,2種態勢下各攔截器策略相同。最后,仿真驗證了采用提出的博弈策略,攔截器可以實現對目標的攔截,且不同的綜合權重將導致不同的攔截結果。3Pareto博弈策略設計




4 仿真結果及分析


5 結論
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
山東冶金(2019年3期)2019-07-10 00:54:04
藝術啟蒙(2018年7期)2018-08-23 09:14:18
消費導刊(2018年10期)2018-08-20 02:57:02
數學大世界(2018年1期)2018-04-12 05:39:14
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
通信電源技術(2016年1期)2016-04-16 04:57:26
