永磁同步直流電動機的直接轉矩系統(tǒng)設計
2019-09-23 08:09:46李博張靖典
電子制作 2019年17期
李博,張靖典
(西安工業(yè)大學北方信息工程學院, 陜西西安,710032)
0 引言
1823 年出現(xiàn)了世界上第一臺電動機,它的定子由永磁材料所制造,也就是永磁體,所以它的定子可以自身產(chǎn)生勵磁磁場,這就是永磁同步電動機。我國是盛產(chǎn)稀土鈷永磁和釹鐵硼永磁的國家,永磁礦物材料的儲備量非常高。因此,對于我國來說,永磁電動機的發(fā)展有很好的應用前景。
直接轉矩調(diào)速系統(tǒng)直接摒棄了解耦的思想。簡單明了的對電動機的磁鏈進行分析,對轉矩進行控制,并且用定子的磁鏈的定向作為最基本的準則,避開了電機中不易確定與測量的參數(shù)。所以直接轉矩調(diào)速系統(tǒng)的控制更加簡單直接,計算過程也更加方便。
本論文主要是探究直接轉矩控制系統(tǒng)對于永磁同步直流電動機來說,是否可以提升其效率;以及直接轉矩控制對其的影響和利弊陳述,并且基于此對這一過程進行理論分析。
1 永磁同步直流電動機的數(shù)學模型
永磁同步直流電動運行起來比較復雜。以下將分別介紹磁鏈方程、電壓方程、轉矩方程和運動方程。因為這四個方程式構成永磁同步直流電動機的數(shù)學模型的基礎。
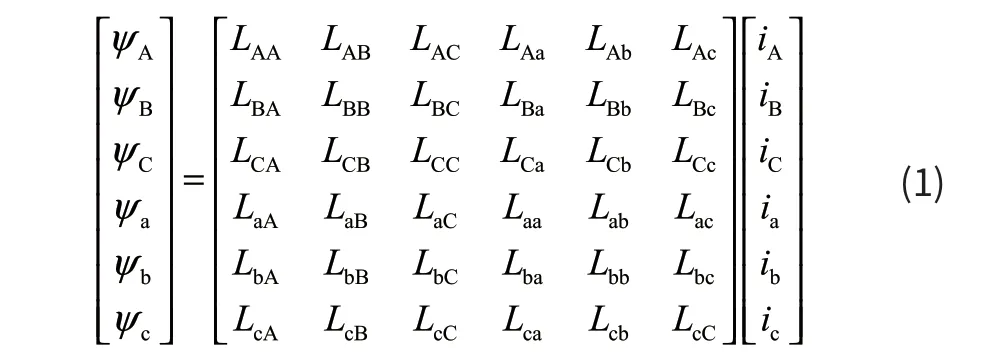
1.1 磁鏈方程
每個繞組的磁鏈自感磁鏈加上互感磁鏈就等于每個繞組的自身磁鏈,而互感磁鏈是其它的繞組對這個自身繞組所產(chǎn)生的。永磁同步直流電動機有六個繞組,所以就有六個磁鏈方程,這六個方程(1)如示。
或寫成:

1.2 電壓方程
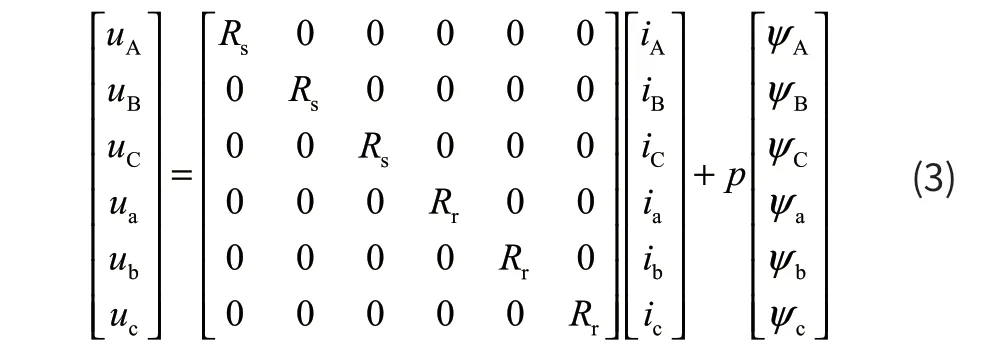
或寫成:

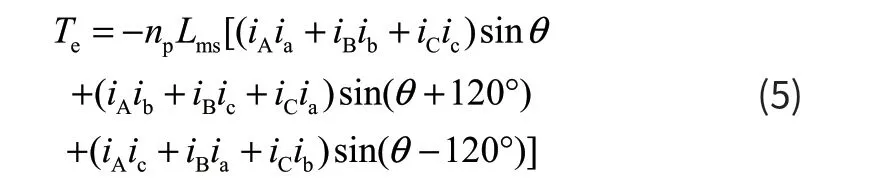
1.3 轉矩方程
1.4 運動方程

其中 TL —負載阻轉矩;J —機組的轉動慣量。
轉角方程為:

2 直接轉矩控制系統(tǒng)
2.1 直接轉矩控制系統(tǒng)的基本原理
圖1 為永磁同步直流電動機的直接轉矩調(diào)速系統(tǒng)的整個原理框圖,此系統(tǒng)主要是通過控制電動機的磁鏈和轉矩,以此達到控制整個電動機的目的。如圖所示,*T 是由電磁轉矩所產(chǎn)生的一個信號,而這個信號是由轉速調(diào)節(jié)器(ASR)所輸出而來的,而要想實現(xiàn)不被干擾的轉矩控制,還需要其內(nèi)環(huán),因為它可以壓制磁鏈的變化,使整個系統(tǒng)都實現(xiàn)解耦,所以只能把內(nèi)環(huán)放在*T 后面。至于 sψ,它是轉子磁鏈,而直接轉矩控制系統(tǒng)就是要使它的幅值保持不變,然后改變定子磁鏈的運動速度,當其運動速度改變了,那么磁通角的大小也將改變,這就是直接轉矩調(diào)速系統(tǒng)的控制方式。
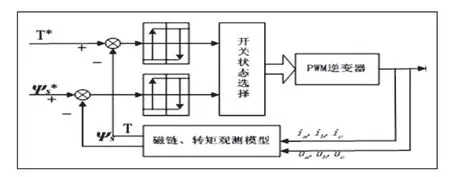
圖1 直接轉矩控制系統(tǒng)圖
2.2 直接轉矩控制系統(tǒng)的特點
直接轉矩控制系統(tǒng)主要有四大特點:
(1)簡單直接。
(2)幾乎不受參數(shù)的影響。
(3)誤差非常小。
(4)性能優(yōu)良。
以上特點,使得直接轉矩控制系統(tǒng)一經(jīng)推出,就立馬被大眾所接受,并且迅速得到了廣泛的使用和傳播。
3 直接轉矩控制系統(tǒng)的建模與仿真
3.1 建立直接轉矩控制系統(tǒng)仿真模型
如圖3 所示,此圖為直接轉矩控制系統(tǒng)的仿真模型,在此仿真模型中,使用的是PI 調(diào)節(jié)器,此調(diào)節(jié)器的轉速是積分制的,其輸出是限幅的。而永磁同步直流電動機將采用基于α-β 坐標系的數(shù)學模型,定子的磁鏈采用帶有滯環(huán)的雙位式控制器,轉矩調(diào)節(jié)器也和定子磁鏈一樣。simulink中的s 函數(shù)編寫編寫電壓矢量。
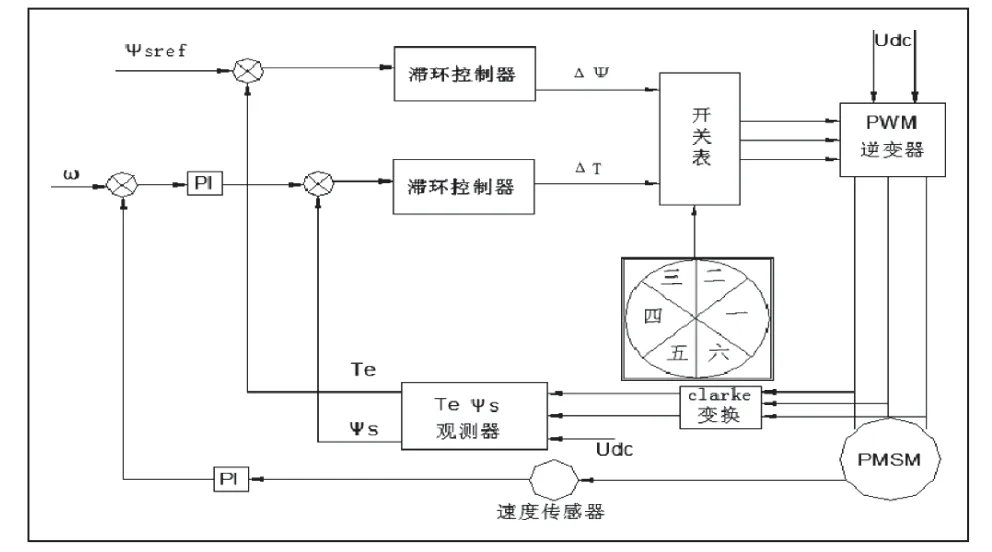
圖2 永磁同步電動機直接轉矩控制原理框圖
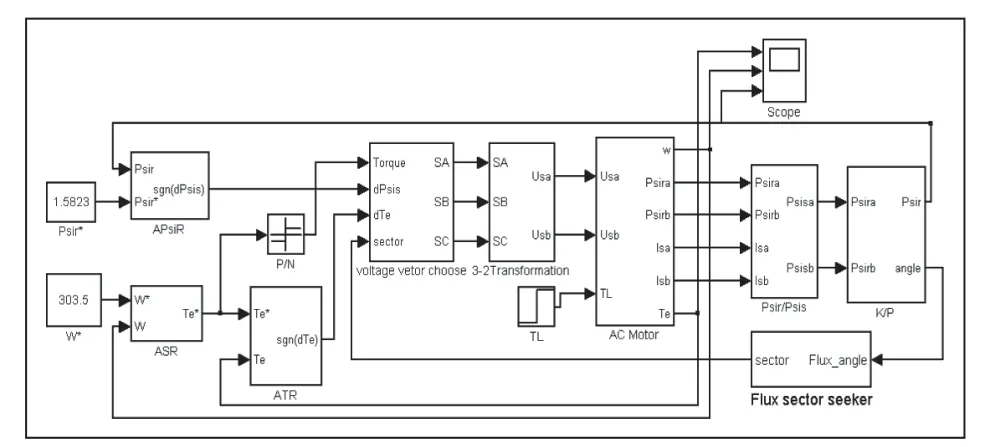
圖3 直接轉矩控制系統(tǒng)仿真模型
3.2 仿真的結果與分析
在仿真的時候,永磁同步直流電機的參數(shù)為:直軸電感Ld=0.00851H,定子電阻Rs=2.8751Ω,永磁材料制成的轉子的磁鏈ψf=0.1751Wb,交軸的電感Lq=0.00851H;極對數(shù)p=4;轉動的慣量J=0.000851Kg·m2,滯系數(shù)B=O,磁鏈給定為ψs=1.2Wb,逆變器直流電壓U=380V,考慮電機的理想狀態(tài),電機摩擦系數(shù)為零。速度環(huán)PI 調(diào)節(jié)器參數(shù)為kp=0.31,ki=23,系統(tǒng)仿真時間設為0.51s,此參數(shù)是經(jīng)過反復調(diào)試而得到的。
①當空載啟動時
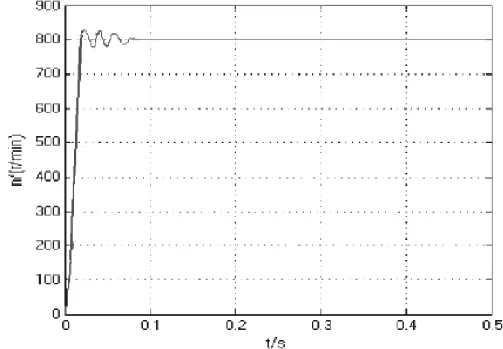
圖4 (b) 轉速響應曲線
②當帶負載啟動時
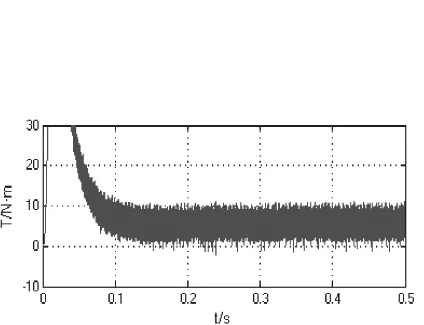
圖4 (c) 轉矩響應曲線
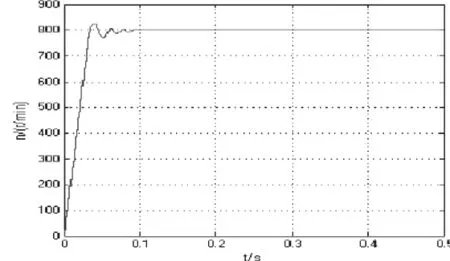
圖4 (d) 轉速響應曲線
③當系統(tǒng)穩(wěn)定時
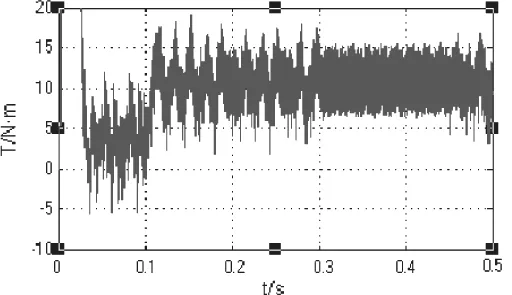
圖4 (e) 轉矩響應曲線
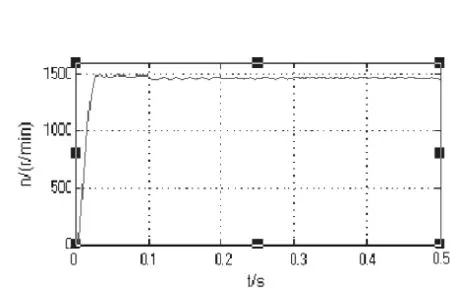
圖4 (f) 轉速響應曲線
由上圖可知在轉速突變時,轉矩波動較大,但能在12ms 左右便進入穩(wěn)定,恢復原值。但是在直接轉矩控制系統(tǒng)附加在永磁同步直流電動機的過程中,定子和轉子的磁鏈以及電動機轉矩的脈動都將立馬上升,仍有很大的改進空間,對于產(chǎn)生磁鏈和轉矩脈動的主要原因分析如下:
(1)滯環(huán)控制器不能及時控制誤差,因此,穩(wěn)態(tài)精度仍有待提高。
(2)在電機低速運行時,由于溫度的變化,定子電阻阻值也會隨之變化,從而影響永磁同步直流電動機的參數(shù),從而使其低速性能變差。
(3)電壓空間矢量的選擇是通過滯環(huán)控制器的輸出來控制的,因此只可能比較兩個滯環(huán)控制器的輸出,這樣一來,電壓空間矢量就是突變的,并且使得磁鏈和轉矩也就發(fā)生突變,磁鏈和轉矩脈動也就不可避免了。
4 結論
整篇論文的主要內(nèi)容到此已經(jīng)基本介紹完畢,現(xiàn)在對以上研究做一個歸納和總結,通過對研究內(nèi)容的總結,不但為今后的研究工作打下一定的基礎,還可以通過總結看出研究內(nèi)容的一些不足之處,使之成為日后改進此項研究可以進一步進行的工作。
(1)通過簡要介紹各個坐標以及各個坐標相互轉換的原理和具體算法,在不同坐標系下,我們也分析并建立了各個情況下的數(shù)學模型。
(2)分析了PMSM 下DTC 系統(tǒng)的基本原理,其根本思想就是直接對轉矩進行控制,在改變轉矩角的同時是定子的磁鏈的幅值為一定的常數(shù),以此來直接控制同次同步直流電動機的轉矩,從而減少了大量而復雜的計算。
(3)用Matlab 軟件中的Simulink 作為仿真工具,永磁同步直流電動機的直接轉矩控制系統(tǒng)進行了仿真,并且得到了其模型,而且在此基礎上,對其結果也進行了研究與分析。分析仿真結果,定子磁鏈波形基本符合圓形定子磁鏈的要求,且轉矩和轉速響應也基本符合預先的設想。但由于直接轉矩的自身缺陷,使得定子磁鏈脈動仍然較大,并通過對仿真結果分析,討論了該方法存在的問題,指出傳統(tǒng)直接轉矩控制系統(tǒng)磁鏈、轉矩脈動大的根本原因是一個周期內(nèi)只能選擇一個基本電壓矢量,且轉矩和磁鏈誤差不能被所施加的電壓完全補償。
