高速取紙機構主凸輪廓線設計及運動分析
2019-09-23 12:40:26楊奔奔曹巨江劉言松
食品與機械 2019年8期
楊奔奔 曹巨江 劉言松 楊 坤
(陜西科技大學機電工程學院,陜西 西安 710021)
在中國傳統文化中,食品作為一種走親訪友的禮物已流傳千年之久,如茶、酒、點心等。作為禮物其精美的包裝是必不可少的。因此,食品包裝工業已成為現代食品生產工業體系中最重要的一部分,其中紙質包裝應用最為廣泛[1]。中國食品包裝機械的發展可追溯至20世紀,如香煙的包裝設備[2]。高速取紙機構可用于食品包裝過程中將食品外包裝(包裝紙、紙盒等)從整摞堆積的狀態轉為單個排列的狀態。中國學者對取紙機構的研究經歷了早期的擺動式[3]到現在回轉式的過程。擺動式在高速運轉下會產生較大的震動,影響整個機器的穩定性;回轉式能較好地平衡慣性力,在高速取紙機構的研究中被廣泛關注。
李龍等[4-5]在分析了取盒機構的運動軌跡后,提出了一種四頭凸輪—連桿的串聯機構,可達到很好的取盒目的。王宏祥等[6]通過研究四頭行星輪系取盒機構的運動規律建立數學模型,確定了影響其運動的關鍵參數,完成了對機構的優化設計。童俊華等[7]設計了一種以橢圓—圓齒輪為傳動機構的行星輪系取盒機構,該機構與圓齒輪行星系取盒機構相比,其運動特性進一步得到了優化。但目前研究或是因為機構自身特點或是剛性較差等原因,只能在較低轉速下平穩運行。
在前人研究的基礎上,研究提出了一種凸輪—平行四邊形串聯的組合機構,并通過對凸輪廓線進行設計和分析,分析基圓半徑和升程與回程的運動角對運動特性的影響,以期為后續高速取紙機構的優化設計提供理論指導。
1 雙凸輪—平行四邊形機構
為實現吸頭較為復雜的運動軌跡,采用雙凸輪和平行四邊形機構(吸頭裝在一個連桿上)的組合機構,如圖1所示。

1. 吸頭 2. 從動擺桿 3. 平行四邊形機構機架 4. 鉸鏈A 5. 鉸鏈B 6. 主動擺桿 7. 副凸輪 8. 轉盤 9. 主凸輪 10. 紙倉
圖1 機構原理簡圖
Figure 1 Schematic diagram of the mechanism
在上述機構中,雙凸輪與機架固連,平行四邊形機構機架3的鉸接端A的運動軌跡由主凸輪9的廓線確定,另一端B鉸接在轉盤上,由轉盤帶動桿機構繞凸輪回轉中心O轉動,吸紙過程中通過主凸輪調整桿機構機架3姿態使得吸頭1在取紙時與紙架保持平行,通過副凸輪7控制擺桿轉動使吸頭1在取紙過程切向絕對速度為0,在法向實現伸出、縮回保證能順利取紙并退出。取紙過程可分為3個階段:升程階段、取紙階段、回程階段,如圖2所示。
(1) 升程階段:將鉸鏈A 4送到指定位置,使其在下一階段能更好地實現吸頭的平行狀態,該階段通過主凸輪9廓線調整平行四邊形機構機架3的姿態使吸頭1與紙倉10平行。
(2) 取紙階段:當吸頭1轉到取紙位置時,通過副凸輪7使主動擺桿6逆時針擺動,調整吸頭1的位置使其到達紙倉,并停留一定時間,以保證成功取到紙。

圖2 取紙過程Figure 2 Process of paper picking
(3) 回程階段:吸頭1取紙后,主動擺桿6在這一階段法向的前伸動作已由最遠處開始縮回,但仍與紙倉10平行退出一段距離后再轉動退出取紙區域。
2 主凸輪廓線設計
主凸輪用以調整四桿機構中吸頭1的姿態,以避免吸紙時吸頭與紙盒間出現縫隙從而產生漏氣、不能取紙的現象。
2.1 取紙過程吸頭姿態分析
從圖2可以看出,吸頭的平行狀態是從吸紙前吸頭前伸開始,到取紙、吸頭退回,且一直持續到退出了一定距離后結束。因此要求通過主凸輪廓線變化使得平行四邊形機構的機架能在某個位置進入與料倉平行狀態,且保持一定時間。
2.2 凸輪廓線設計
凸輪廓線設計的初始參數如表1所示。

表1 初始設計參數Table 1 Initial design parameters
為保證在吸紙階段吸頭保持與紙倉平行,鉸接點A運動的軌跡與鉸接點B軌跡半徑相同,為平移一個連桿長度的圓弧。如圖3所示,轉盤半徑R,平行四邊形機構的機架長度L,β所對應圓弧為鉸鏈B走過軌跡,α所對應圓弧為鉸鏈A走過軌跡,該段方程為:
(1)
2.2.1 升程段凸輪廓線設計 高速運動下,為實現機構平穩運動,必須保證加速度曲線光滑[8]。高階多項式運動規律通用性強,并能滿足條件[9-11],因此本文采用七次多項式對凸輪廓線的升程段和回程段進行設計。
升程段四桿機構機架擺動角度變化如圖4所示,該段擺動角度隨凸輪轉角變化方程為:
θ=c7φ7+c6φ6+c5φ5+c4φ4+c3φ3+c2φ2+c1φ+c0。
(2)

圖3 平行段凸輪廓線Figure 3 Cam profile in parallel stage
代入邊界條件:
(3)
φt=φt1-φt0+δt,
(4)
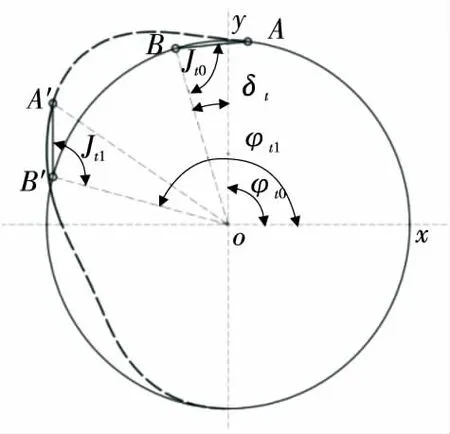
圖4 升程段平行四邊形機構機架擺動變化Figure 4 Variation of the frame swing of the paralle- logram mechanism of the lift section
式中:
δt——升程期凸輪轉動角修正量,(°)。
當B在y軸右側時,δt取正;當B在y軸左側時,δt取負;當B在y軸上時,δt=0。
可得出升程段擺角變化規律為:
θ=c7φt7+c6φt6+c5φt5+c4φt4,
(5)
式中:
φt——升程段的推程角,(°)。
升程段運動過程中,鉸鏈B軌跡方程為:
(6)
升程段凸輪廓線方程即為鉸鏈A軌跡方程:
(7)
式中:
γt——平行四邊形機架(AB)與x軸正向夾角,(°)。
γt=Jt0+θt+φt-π/2-δt。
(8)
2.2.2 回程段凸輪廓線設計 為計算方便,回程段采用反向求凸輪廓線方法。如圖5所示,凸輪轉角起點B'終點B,由B'向B反向計算。
回程邊界條件:
(9)
φh=|φh1|-|φh0|+δh。
(10)

圖5 回程段軌跡Figure 5 Return path track
將式(9)代入式(2)可得回程段平行四邊形機構機架擺動角度隨凸輪轉角變化規律方程為:
θh=ch7φ7+ch6φ6+ch5φ5+ch4φ4,
(11)
式中:
δh——回程期凸輪轉動角修正量,(°)。
當B'在y軸右側時,δh取正;當B'在y軸左側時,δh取負;當B'在y軸上時,δh=0。
回程段鉸鏈B軌跡方程為:
(12)
回程段凸輪廓線方程為:
(13)
式中:
γh——平行四邊形機架(AB)與x軸正向夾角,(°)。
γh=Jh0+θh+φh-π/2-δh。
(14)
2.3 壓力角驗算及分析
凸輪機構的壓力角可按式(15)計算。
(15)
式中:
KQt/h——升/回程在該點凸輪廓線切線的斜率;
KLt/h——升/回程在該點平行四邊形機架AB的斜率;
α'——該點處從動件壓力角大小。
將式(6)、(7)、(12)、(13)代入式(15)即可得凸輪上某一點壓力角的值,對式(5)、(11)分別求二階導即可得升程段和回程段角加速度變化方程。通過對方程進行分析可知:機架AB的長度L和轉盤的半徑R一定時,基圓半徑Rj變化范圍為R-L~R+L。隨著基圓半徑的增加,升程段角加速度最大值會降低,但回程段角加速度最大值會增加;隨著凸輪轉動角的增加,升程段和回程段角加速度最大值會減小;隨著基圓半徑的增加,升程段壓力角會增加,但并不明顯,而回程段壓力角增加較為明顯,但其壓力角最大值始終小于升程段的;隨著凸輪轉動角增加,升程段壓力角會增加,而回程段會減小。
3 實例計算
3.1 理論分析
高速取紙機構中轉盤半徑R=200 mm,吸頭安裝所需長度L=80 mm,平行姿態保持區間β=30°,β0=170°,其他參數見表2。
初選Rj=200 mm、δt=0、δh=0,通過已知條件和計算公式,運用Matlab編寫計算程序運行計算[12-13],得出理論凸輪廓線如圖6所示。

表2 設計初始參數Table 2 Basic design parameters (°)
取轉角修正角δ=0,運用Matlab編寫計算程序,對升程段和回程段凸輪廓線在不同的基圓半徑下,分析其壓力角最大值和角加速度最大值變化,結果見圖7、8。

圖6 凸輪輪廓Figure 6 The cam profile
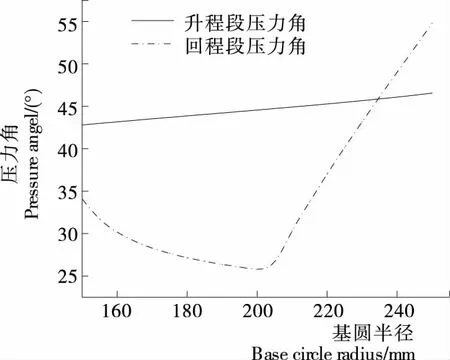
圖7 不同基圓半徑下最大壓力角變化曲線Figure 7 The max pressure angle corresponding at different base circle radius
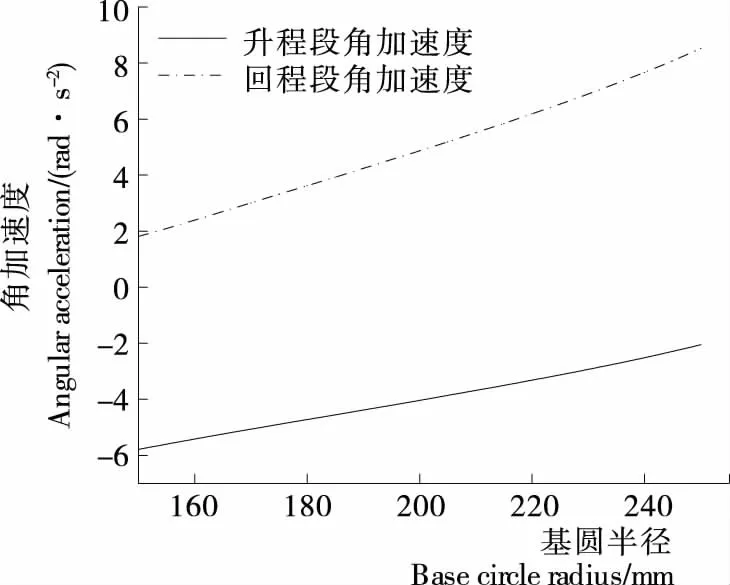
圖8 不同基圓半徑下最大角加速度變化曲線Figure 8 The max diagram corresponding at different base circle radius
同理,得出升程段和回程段在基圓半徑為定值(取Rj=200 mm),凸輪轉動角修正角δt取不同值(δt=-30°,-20°,……,30°)時,壓力角和角加速度最大值變化如圖9、10所示。

圖9 不同轉動角下最大壓力角變化曲線Figure 9 The max variation of pressure angle at different rotation angles
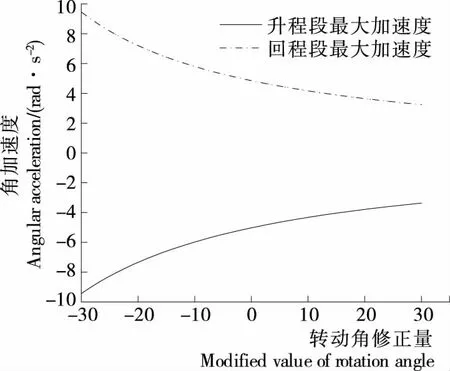
圖10 不同轉角下最大角加速度變化曲線Figure 10 The max angular acceleration variation at different angles of rotation
3.2 仿真分析
取3.1中參數在UG中建立主凸輪9、平行四邊形機構機架3、鉸鏈A 4、鉸鏈B 5和轉盤8的三維模型并進行仿真,測得鉸鏈A 4和鉸鏈B 5在一個周期內的x軸的位移分量如圖11所示,角加速度變化如圖12所示。
通過對以上線圖進行分析可知,本研究設計的主凸輪能滿足姿態要求;基圓半徑和凸輪運動角對升程段的壓力角和角加速度均有較大影響,且對升程段和回程段角加速度影響結果相反;對回程段壓力角和角加速度影響較小。因此,可以考慮以升程段影響為主,選擇適當的基圓半徑和凸輪動角,使升程段在滿足條件下,角加速度最大值盡量小,回程段選擇適當的凸輪運動角,使回程段角加速度最大值不超過升程段角加速度最大值。
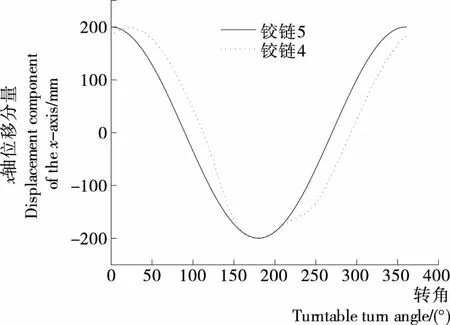
圖11 鉸鏈A、B的x軸的位移分量Figure 11 The displacement component of the x-axis of hinges A and B

圖12 角加速度變化曲線Figure 12 Angular acceleration curve
4 結論
利用七次多項式運動規律對高速取紙機構主凸輪廓線方程、壓力角計算模型和角加速度方程分析可知:利用七次多項式和圓弧組合曲線實現的凸輪廓線能夠滿足凸輪—四桿機構高速取紙機構的姿態要求;在升程段,增加基圓半徑和升程角對壓力角不利,對角加速度最大值有利,滿足高速取紙機構對執行件軌跡的特殊要求。但在回程段,增加基圓半徑對壓力角和角加速度最大值不利,而增加回程角對兩者都有利,因此后續可研究通過優化方法選擇合理的基圓半徑和凸輪運動角。
