基于GNSS的高軌飛行器定軌研究
2019-09-23 08:55:18王立強席福彪于海霞李元元
航天控制 2019年4期
王立強 董 劍 席福彪 于海霞 李元元
1.中國運載火箭技術研究院研究發展部,北京100076 2.大連海事大學船舶電氣工程學院,大連116026 3.北京市電信工程局有限公司,北京 100061
目前,高軌飛行器的定軌是利用地面S波段統一測控系統(USB)進行的,設備復雜、成本高。近年來,利用星載GPS接收機對中低軌道(3000km以下)進行定位的技術已經成熟,并已部分應用到中低軌衛星的定位中。然而,當軌道高度高于4000km左右后,接收正面的單一導航衛星星座衛星信號無法正常接收到4顆衛星,因而無法定位。近年來,國外提出了利用接收衛星旁瓣或接收地球另一面衛星的方法提高接收衛星的數量,這對衛星接收機的靈敏度、可見性等都提出了更高的要求,當前國外已有多例高軌衛星星載GPS接收機飛行試驗,并已取得了部分成果。1997年,TEAMSAT和EQUDATOR-S論證了高于GPS衛星星座的GPS信號閉環跟蹤能力,包括在海拔超過60000km時返回測量數據,以及對旁瓣信號的跟蹤[1]。同年,Falcon Gold衛星在同步轉移軌道成功使用一個低功率的數字取樣接收機記錄了GPS信號。2000年,基于GPS的美國國防部地球同步軌道系統的成功論證首次公開。2001年,AMSAT OSCAR-40的試驗結果進一步證明了基于GPS的高軌定位是可行的,并增強了未來高軌GPS用戶對信號特征的理解。國內方面,已有單位開展了地球同步軌道衛星接收機的研制,提出利用一顆衛星的偽距測量參數,加上動力學模型進行GEO衛星的定軌,但受衛星數量的限制定軌精度約幾百米[2]。
主要研究GNSS系統實現高軌飛行器導航定位的解決方案,包括可見性分析、信號功率計算等,提出利用多星座組合的導航方案,并通過仿真驗證了組合導航解決高軌導航的可能性。
1 存在的問題
高軌飛行器對GNSS衛星的可見性主要取決于以下幾個因素:1)GNSS衛星的發射功率及天線方向圖(主瓣、旁瓣);2)GNSS衛星與飛行器的位置關系及距離;3)GNSS接收機本身的靈敏度。
衛星導航設計主要是針對地面用戶,為其提供連續、實時及高精度的定位導航服務,所以衛星發射天線朝向地球。在LEO(低地球軌道,3000km及其以下范圍),導航系統的可見衛星多,信號條件好;而對于高軌的軌道高度一部分軌道高于衛星星座,一部分低于衛星星座。當軌道高度超出衛星天線覆蓋范圍,它只能接收來自地球另一面的導航衛星發射的信號或衛星旁瓣信號。這樣,絕大部分衛星發射天線主瓣信號就會由于地球的遮擋而無法到達地球的另一面,只有在導航衛星天線下行頻率主波束邊緣構成的環形錐內才能收到衛星信號[3]。如圖1所示,GPS發射天線的主瓣波束寬度為42°,而地球遮擋GPS信號的半錐角為13.9°,飛行器只有在GPS 發射天線主瓣波束邊緣構成的環形錐內才能收到GPS信號,由此,飛行器的GPS可見星數量大大減少,同時高軌飛行器要從地球另一面接收GPS信號,信號傳輸距離增加,信號減弱,增加了接收難度。
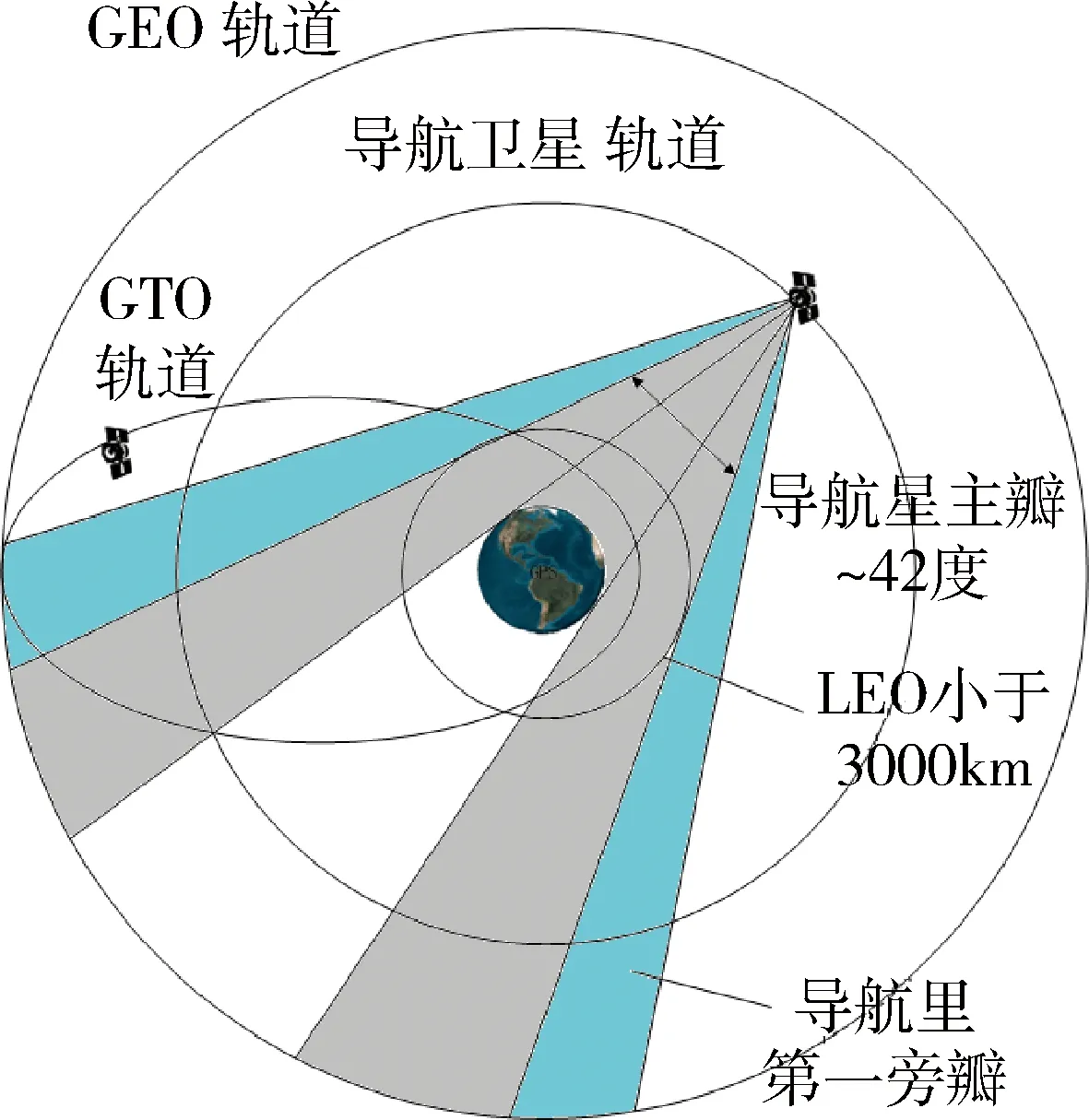
圖1 對GTO軌道及GEO軌道覆蓋示意圖
2 衛星可用性判斷
以2個標準作為判別GPS星是否可見的條件:①導航星可見性,即幾何條件滿足要求;②信號強度滿足要求。
2.1 導航星可見性
當用戶接收地球正面的衛星(不考慮地球的遮擋),直接判斷用戶是否在導航星的主瓣或旁瓣內;當用戶接收地球背面的衛星,判別從導航星到用戶星的信號傳播過程中信號是否受到阻擋,主要看是否受到地球的阻擋。判別的標準是導航星的信號發射半角At是否大于要被阻擋的那部分半角。對發射半角At的設置不僅考慮到了發射半角主瓣信號的接收,也考慮到旁瓣信號的接收,因為這樣可能有利于增加可見星數目,特別是在接收機門限值較低的情況下,從國外的研究成果來看,增加的可見星數目將比較可觀,而且國外的數次高軌道搭載試驗也驗證了確實能夠接收到GPS星的旁瓣信號,而At的計算通過以下公式進行:
(1)
其中,enu為GPS星指向用戶星的矢量;rgps為GPS星指向地心的矢量。
2.2 導航信號可用性
為了利用導航衛星的旁瓣信號,必須計算導航接收機信號的信噪比,接收機接收到的信噪比與衛星發射功率、發射天線增益、鏈路損耗、接收天線增益以及衛星與飛行器相對位置等諸多因素有關:
1)等效發射功率(EIRP)
EIRP與衛星功放輸出的功率Pt以及發射天線增益Gt有關,即:
EIRP=Pt(dBW)+Gt(dB)
(2)
2)自由空間損耗(LD)
衛星信號的電波在空間傳播中受到損耗,最主要的是自由空間的傳播損耗,它占總損耗的絕大部分,傳播距離越大,自由空間的損耗越大,其公示表示為:
LD(dB)=92.45+20log(d*f)
(3)
其中,d為距離,單位km;f為頻率,單位GHz。
3)接收機接收信噪比
S/N=EIRP-LD+Gr-10lgKTRb+LNF
(4)
各符號的含義及數值參見表1。
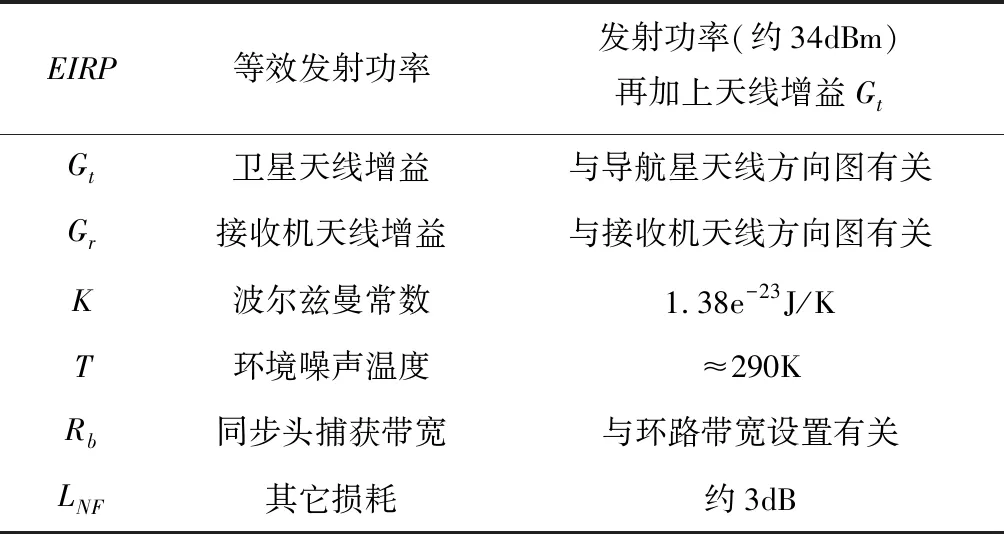
表1 典型空間鏈路參數計算方法
3 多星座組合導航
目前,采用單一的導航定位系統和普通接收機無法滿足定位的可見星要求,可以采用BD2/GPS/GLONASS/GALILEO多星座組合的方式,提高GNSS接收機的定位精度和可靠性。
3.1 多星座組合導航定位原理及其參數分析
衛星導航定位方法的實質是以星地空間距離為半徑的三球交匯,以衛星和用戶接收機天線之間的距離觀測量為基準,根據已知的衛星瞬時坐標確定用戶接收機天線的位置。由于衛星導航系統采用單程測距原理,衛星鐘與用戶接收機時鐘之間難以保持嚴格同步,受衛星鐘和接收機時鐘同步差的共同影響,實際觀測量是含有誤差的偽距。一般將接收機的鐘差作為一個未知參數與觀測站坐標在數據處理中一并解出,因此為了實時求解用戶位置至少需要同步觀測4顆衛星。
BD2、GPS、GLONASS和GALILEO組合導航定位,即接收機同時接收這些導航電文信息,根據接收到的導航電文信息計算得到衛星在空間的瞬時位置坐標,結合測量獲得的用戶到衛星的相對距離,利用多球定位原理計算出用戶在空間的位置,實現高精度的定位和導航。需要注意的是,由于各系統之間存在時間偏差,以及坐標系不同,在多星座組合導航中首先要統一時間和空間參考系。
在多星座組合定位系統中,由于不同的坐標系得到的數據格式和結果都有差別,必須將四者轉換到統一的時間和坐標基準下進行解算。各種導航系統的參數比較見表2。
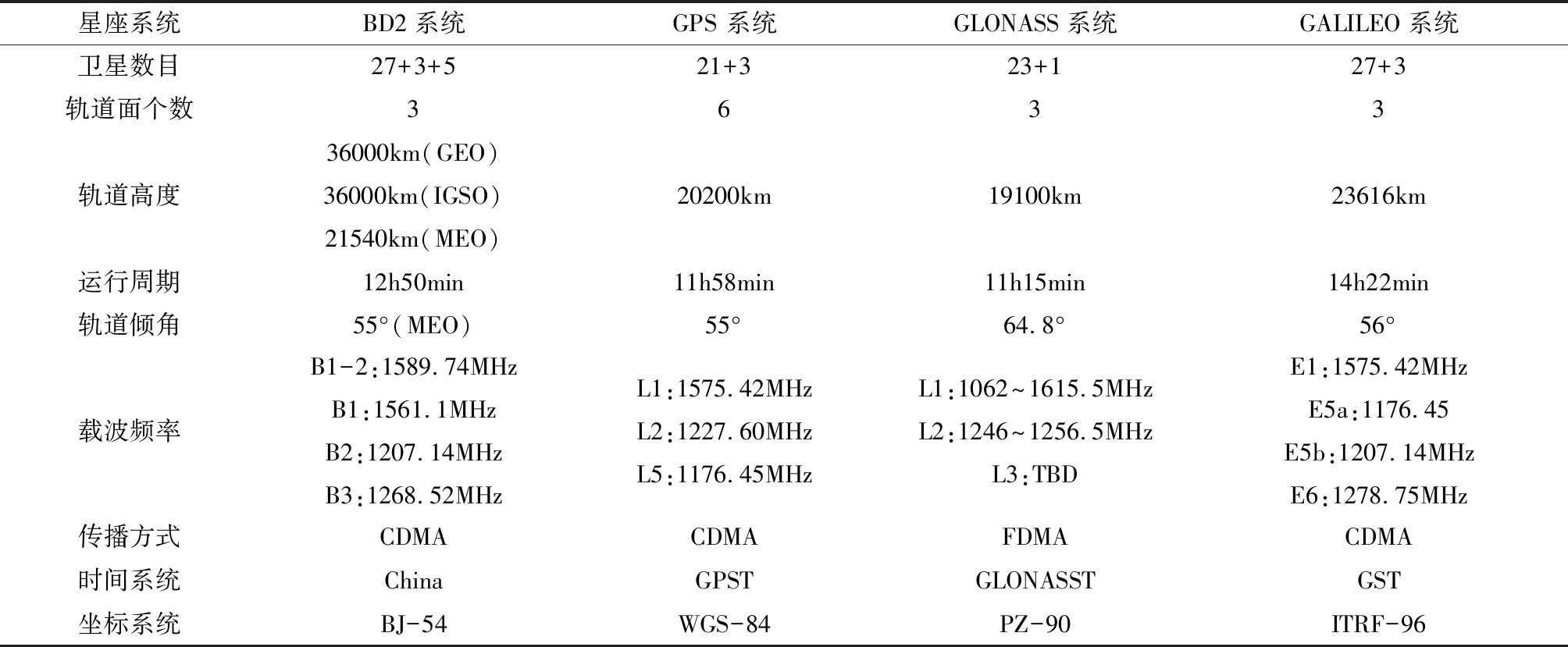
表2 GNSS參數比較表
多星座衛星組合定位算法的基本思路是將各星座衛星的觀測量融合到同一個方程組當中,進而聯合求出導航解。如圖2所示,將GPS、GLONASS、GALILEO和BD2的原始觀測數據同時輸入數據處理器中。將這些數據進行格式轉換、時間轉換、坐標系轉換及偽距組合,然后統一求解,4種定位系統的組合、互相配合與補充,極大地提高了定位的可靠性。
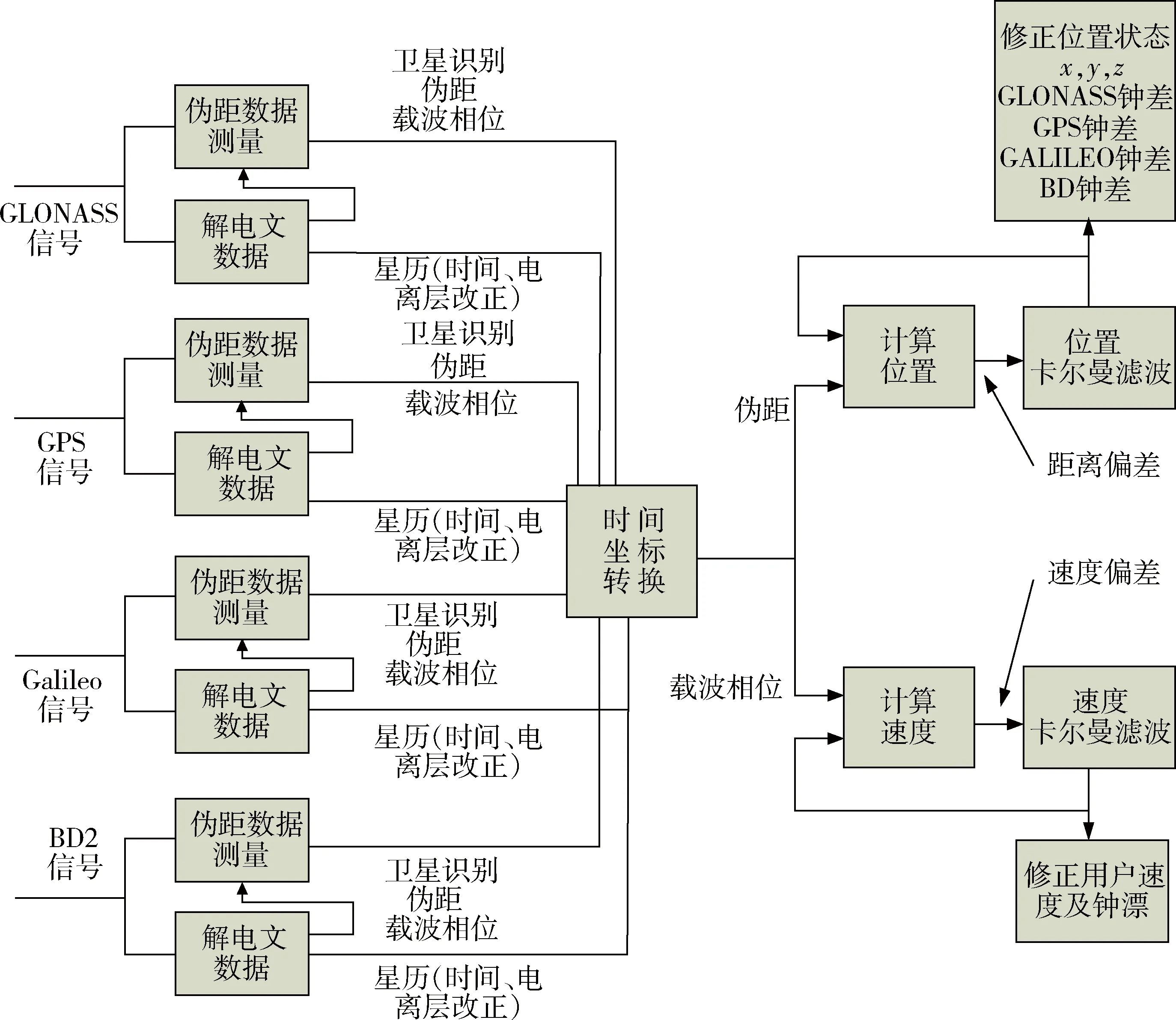
圖2 多星座組合導航定位流程圖
3.2 多星座組合系統觀測方程和坐標轉換
導航衛星測碼偽距的觀測方程可寫為:

(5)
式中,(x,y,z)和(xsi,ysi,zsi)分別是用戶和衛星i在地球坐標系中的位置坐標。
為解算用戶的實時位置,對3個坐標系間的直角坐標進行轉換,要綜合考慮坐標原點的平移、坐標軸之間的旋轉以及由于各直角坐標系的刻度單位不盡相同而引起的尺度變化。目前采用最多的是七參數布爾薩(Bursa)轉換公式,其轉換公式為:
(6)
式中,ΔX,ΔY和ΔZ是坐標原點平移引起的3個平移參數;ΩX,ΩY和ΩZ是坐標旋轉引起的3個旋轉參數;k是尺度變化參數。
3.3 多星座組合系統定位解算
假設將4個系統的時間和坐標都統一到GPS 系統,則觀測方程可統一成如下形式:

(7)


(8)

由以上模型可知,對于不同的星座和不同的可見星,觀測方程組(8)中包含了δxu,δyu,δzu,cΔtGPS,cΔtBd和cΔtgls共6個未知數,當同時觀測到6顆以上導航星時,可得冗余代數方程,用最小二乘法進行迭代求解和補償,即可實現用戶定位解算。
假設觀測到n顆GPS衛星、m顆BD2衛星、k顆GLONASS 衛星和l顆GALILEO衛星,則組合定位方程的矩陣形式及其解形式可以分別表示為:
AX=B
(9)
X=(ATA)-1ATB
(10)
4 高軌衛星可見性仿真計算
對于星載導航系統的高軌衛星天基定軌方案,考慮基于多個導航系統的情況,采用BD2,GPS,GLONASS及Galileo共4個導航系統(雖然Galileo導航系統目前不可用,但是軌道分布及參數都基本上設計完成,可以通過仿真軟件仿真導航衛星軌道)。假設接收機靈敏度可以接收衛星發射天線旁瓣,對GEO軌道接收BD2、GPS、GLONASS和Galileo衛星情況進行仿真如下:
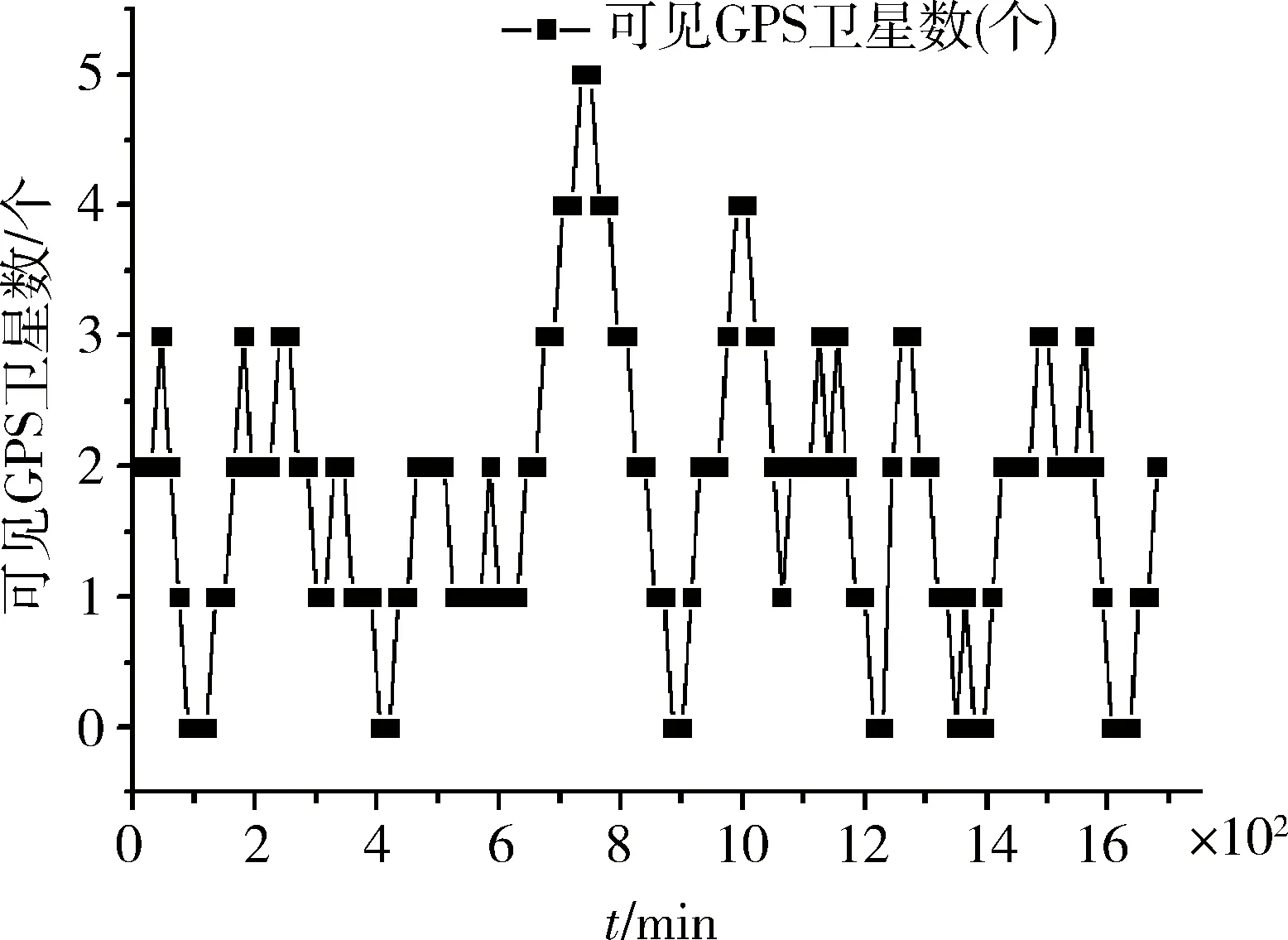
圖3 GPS GEO可見衛星數
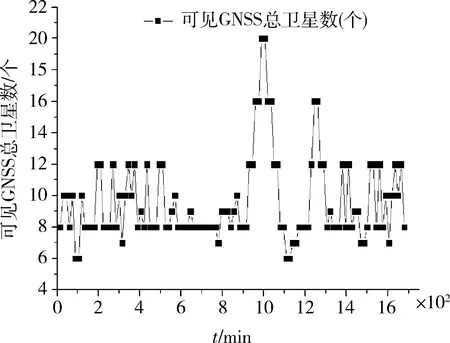
圖4 組合GNSS GEO可見衛星數
從仿真結果可以看出:位于GEO的高軌飛行器在其某些飛行階段,GPS導航星座中的某些導航星雖然幾何關系上可見,但是由于信號衰減的影響,這些導航星的信號不能用于導航解算。因此,對于完成GEO載荷發射任務的火箭,其飛行過程中,能夠采用GPS進行導航的時間和空間范圍是有限的,只有在少數特定的時間和空間內可用。若要滿足定位的可見性要求,可以采用2種方式解決可見性問題:①采用多個GNSS系統組合的方式,增加可見導航衛星的個數;②通過采用高靈敏度的GNSS接收機跟蹤的動態性進行特殊設計。受接收機靈敏度的限制,若要使單一導航系統滿足全天時的要求也是非常困難的。
5 結束語
衛星導航在中、高軌道航天器的定軌研究是一個衛星導航應用的嶄新領域。本文對中、高軌道航天器應用GNSS自主定軌技術的主要問題以及特點進行了分析,針對可見星少、GPS信號弱等難點,給出了相應的解決方案。本文的研究對中、高軌道,如GEO、HEO軌道衛星的定軌領域有重要作用,在衛星定軌、月球探測器近地段導航等應用有參考價值。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
創業家(2015年10期)2015-02-27 07:55:08
創業家(2015年10期)2015-02-27 07:54:39
