關節式內骨骼氣動軟體驅動器的結構設計
2019-09-24 11:17:18武兆平李小寧郭鐘華
農業工程學報 2019年15期
武兆平,李小寧,郭鐘華
關節式內骨骼氣動軟體驅動器的結構設計
武兆平,李小寧,郭鐘華
(南京理工大學機械工程學院,南京 210094)
軟體驅動器具有優異的柔順性,能適應不同形狀的目標物體,且不易損傷被抓持物。為了在工業流水線上快速安全可靠地抓持諸如水果、精密元器件等不同質量、不同尺寸物體,該文介紹了一種新型關節式內骨骼氣動軟體驅動器,將驅動與承力功能分解,在保持柔順性的同時,顯著提高了抓持能力。推導了氣壓驅動下,驅動器的彎曲角度數學模型。以理論模型為基礎,分析了驅動器的各項設計參數對彎曲角度的影響。以確定氣壓下自由端位姿作為輸入條件,以驅動器整體質量最小為優化目標,優化了各參數值,并以得到的參數完成了軟體驅動器的實物制造與裝配,且試驗獲得了其彎曲角度與彎曲剛度。試驗表明在最大工作壓力為150 kPa時,總體誤差控制在9%以內,證實了所建立驅動器理論模型的正確與有效性。驅動器的彎曲剛度在最大工作壓力時達到4.50 N/rad,彎曲剛度得到大幅提高。該軟體驅動器具有良好的開發和應用前景。
設計;優化;軟體驅動器;氣動;內骨骼;剛度;柔順性
0 引 言
夾持器是工業自動化生產線的重要組成部分,實現工件自動夾持和搬運操作。隨著生產力水平和勞動效率的提高,混流生產等新的制造技術對夾持器功能多樣性提出了更高的要求,尤其是對不同形狀、不同質量且易損傷物體的安全可靠夾持,諸如各類水果、精密元器件等。近年來,軟體機器人發展迅速,成為研究熱點[1-5]。其中氣動驅動軟體夾持器具有優異的柔順性,制作工藝低,響應迅速,對環境適應性高,因而得到了廣泛應用[6-10]。
國內外學者根提出了多款氣壓驅動的純軟體夾持器。美國哈佛大學首先提出了軟體機器人的概念,Ilievski等[11]研究人員共同開發出一種采用了氣動網格型驅動的海星軟體夾持器,能對雞蛋、小白鼠等進行安全抓持。Mosadegh等[12]設計了一款快速彎曲氣動驅動器,將腔室之間的內壁一分為二,通過腔室內壁相互膨脹擠壓使驅動器彎曲。該類純軟體驅動器在夾緊物體過程中能被動的獲得較多的自由度,在連續通入壓縮空氣時能夠被動的包絡物體,降低了控制的難度。但其剛度較低,其本身既是動作的驅動器,又是夾持的執行器,因而導致其夾持力度小,負載能力偏低,難以滿足較重工件的夾持要求。同時較軟的材料在氣壓作用下會產生許多預期之外的不必要變形,如徑向膨脹、不規則伸展等,降低了輸出效率[13-14]。
再進一步如Polygerinos等[15-16]提出了一種復合材料流體驅動器,在硅橡膠材料中嵌入纖維加強筋,有效地限制了手指驅動器的徑向變形,提高了剛度和抓持重物能力。同類的還有Deimel等[17]設計的高柔性軟體靈巧手,采用了單通道氣腔并使用雙螺旋線來限制驅動器的徑向膨脹使驅動器能夠充分的彎曲。但它們都只是對夾持器的部分變形進行了約束,局部仍存在不期望的徑向膨脹或者軸向伸展,會消耗部分氣壓驅動能量,驅動器夾持能力仍然較低[18-19]。此外,國內學者Sun等[20]設計了一種箍加強的康復手,將塑料環狀骨骼箍于軟體驅動器四周,起到加固強化作用,提高了剛度。文獻[21-22]提出了幾種軟體外骨骼手結構,結合了骨骼與氣動方式,具有優異的可操作性。這類結構將剛性骨骼結構安置于軟體驅動器外部,對驅動器與目標物體的接觸柔順性產生了一定的影響,形狀適應性能隨之降低。
因此,如何提高軟體驅動器的剛度、提高其持重能力、減小甚至限制手指不必要的變形,并保持其柔順適應性,是當前研究中亟待解決的一個問題。為了解決上述問題,本文提出了一種新型的驅動與承力功能分解的氣動關節式內骨骼軟體驅動器,并對其進行了理論分析。通過建立的驅動器彎曲數學模型,分析獲得驅動器各設計參數對彎曲性能的影響,建立了一套優化設計算法,制作完成原型驅動器,并進行了試驗驗證。
1 結構設計
本論文提出了一種關節式內骨骼的結構。其整體設計原理是:采用由鉸鏈串聯鏈接的若干內骨骼結構單元,作為驅動器的承力機構。外層驅動部分為周向均勻纏繞纖維的硅橡膠層,以氣壓驅動來完成彎曲變形動作,從而使驅動器在保持優秀柔順性的同時具有較高的夾持能力。
驅動器的整體外形仿照章魚觸手等軟體生物,由指端以一定角度向末端尺寸漸變增大,呈現順滑的錐形結構[23]。驅動器抓取接觸面采用山脊形結構以增大接觸摩擦力。圖1為提出的軟體驅動器的三維結構示意圖。為了獲得更多的形狀控制可能性,完成更多的動作抓取不同形狀、尺寸的目標物體,整個驅動器分為3指段,每個指段可分別輸入不通氣壓來控制變形。每個指段由5個指關節組成,每個指關節以鉸鏈形式相互串聯鏈接,可以自由旋轉,旋轉角度為?45°至180°。
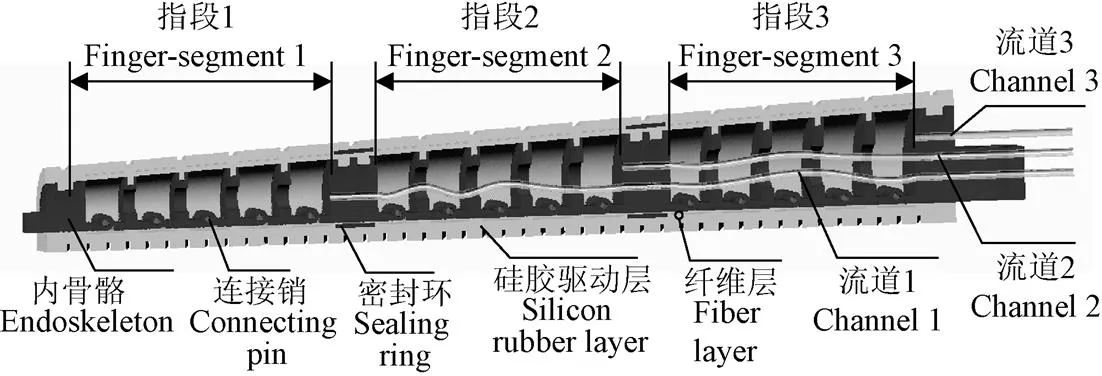
圖1 驅動器三維模型圖
每個指關節模型可以分為3部分:1)由鉸鏈串聯鏈接的剛性內骨骼;2)具有柔順弧度的軟體硅膠驅動層;3)均勻嵌入軟體硅膠驅動層中的纖維加強層。圖2為一節內骨骼單元的外形示意圖。指關節氣腔充氣后,氣壓力作用在內骨骼的剛性端面上,由于關節底部鉸接的結構,使內骨骼只能產生繞鉸接點的轉動;而硅膠部分受氣壓作用產生拉伸變形,從而形成了關節的彎曲。其中纖維層約束了硅膠的徑向膨脹變形,有效控制了手指的外形輪廓并提高了充氣能量的利用率。
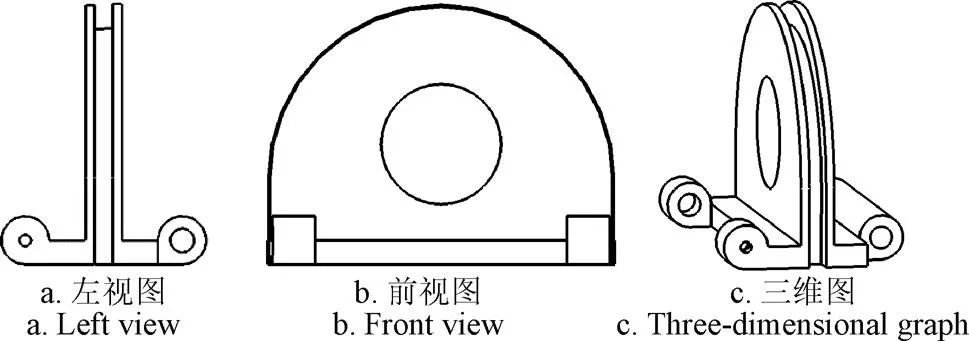
圖2 內骨骼單元結構示意圖
驅動器工作時,正壓氣體從末端流道進入,分為3段1、2、3,分別控制3個指段。每個腔室在驅動氣壓與硅橡膠拉伸阻力作用下產生彎曲變形,獲得期望的彎曲角度與輸出力矩。驅動器整體彎曲角度為各腔室彎曲角度之和,輸出力矩為各腔室輸出力矩之和。圖3為驅動器彎曲變形示意圖。分別控制三指段使驅動器獲得了更多的抓取姿勢。
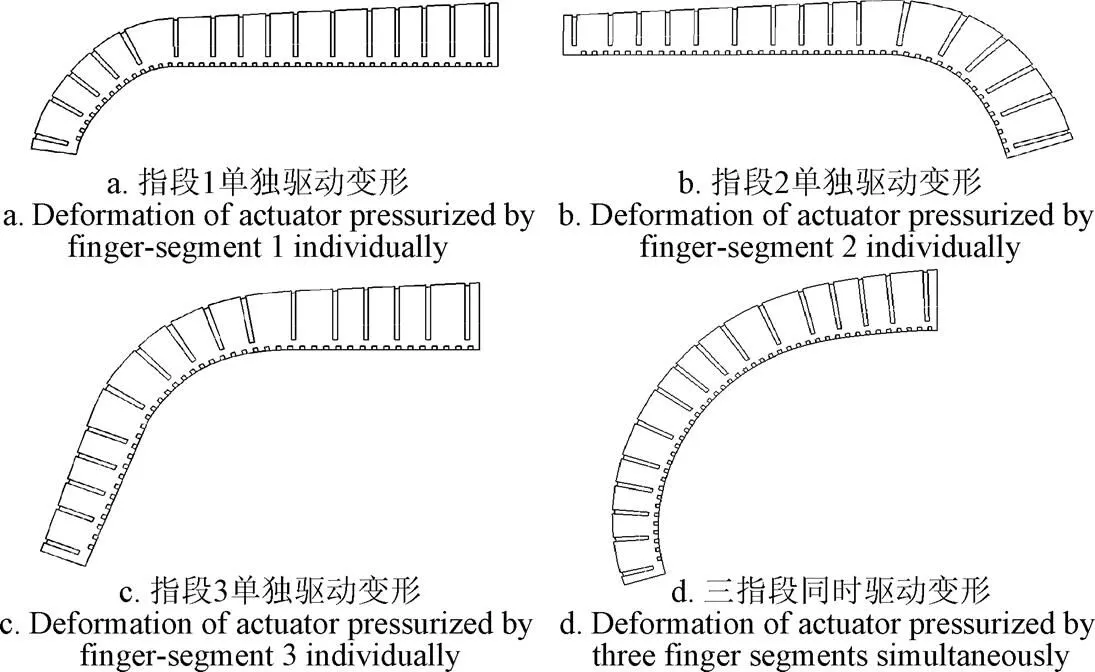
圖3 驅動器彎曲變形示意圖
軟體手指驅動器由三部分構成,采用模塊式制造與裝配,層次分明,其設計方式使得結構緊湊,易于裝配[24]。其中內骨骼采用Ploymaker公司的PolyPlusTM PLA材料,經3D打印成型。驅動層則采用英哲PS6600系列10A硅橡膠,硬度適中且具有良好的拉伸性能。嵌入加強層選用纖維材料,柔順輕便又能很好限制徑向變形。圖4為3根軟體驅動器構成的手爪結構示意圖。當手爪與被夾持物接觸完成包絡抓取,抓持穩定,軸向不變形,接觸摩擦力通過內骨骼傳遞到末端手掌,其抓取能力有了顯著的提高。

圖4 軟體手爪外形圖
2 驅動器數學模型
為了獲得氣壓驅動下驅動器的位姿狀態,本文對該模型進行了理論分析與數學建模。軟體手指驅動器可看成個工作原理相同的指關節串聯而成。對一個指關節進行理論分析,以此類推,則整個驅動器為一個連桿系統。為了方便分析和求解,對該系統作如下假設:1)纖維層約束了硅橡膠的徑向變形,徑向變形很小,可以忽略,且纖維層約束力與硅橡膠徑向張力大小一致平衡;2)單獨一個指關節的軸向長度較短且彎曲角度較小,因而曲率半徑很大,默認忽略了由于手指外形錐度產生的腔室前后方向的高度差,簡化成曲率半徑不變的模型;3)骨骼鉸鏈之間完全光滑,沒有摩擦力。
2.1 超彈體應變能函數模型
本文采用橡膠應變能函數推導其應力應變[25-27]。橡膠應變能函數有多種,其中Yeoh模型可以使用簡單的單軸拉伸試驗數據去模擬其他大變形行為,因而采用Yeoh模型[28-29]。
對于最一般類型的均勻應變的主應力,真實主應力為

式中為勢函數,1為第一主不變量,2為第二主不變量,λ為主伸長比,0為一任意的靜水壓力,且


式中1為軸向伸長比,2為徑向伸長比,3為周向伸長比。
當腔室內輸入氣體產生壓力時,驅動器底部由于剛性骨骼的限制不產生伸長,只繞鉸鏈旋轉軸產生彎曲變形,每個腔室對應一個彎曲角度,具有一個彎曲半徑。在本理論模型中,由于硅橡膠中嵌入了纖維約束層,徑向沒有變形,所以徑向伸長比2為1。拉伸彎曲過程中,硅膠層厚度發生均勻變化,周向伸長比3可以由變形后厚度與初始厚度確定。將軸向伸長比1定義為,因而根據方程(4)可得3個方向的主伸長比分別為

式中為硅膠層初始厚度,mm;為變形后硅膠層厚度,mm。
引入Yeoh模型,應變能函數為

式中10,20,30分別為一次項,二次項和三次項系數,根據應力應變拉伸試驗確定。
假設徑向受力平衡,即徑向應力2=0。由于周向應力3遠遠小于軸向應力1,則軸向方向被作為唯一非零主應力,定義為,則真實應力可得
2.2 彎曲模型
對單一指關節進行受力分析,單氣腔簡化成前后為不變形邊界,底部為兩剛性鉸鏈連桿,中間為硅橡膠的模型[19]。如圖5所示,在氣壓作用下彎曲變形,產生內部氣壓力,硅橡膠拉伸應力F以及內骨骼連接鉸鏈間的作用力。以旋轉軸為力矩中心,鉸鏈間作用力彎矩為零。因此驅動力矩為氣壓產生的力矩M,阻力矩為硅橡膠應力產生的力矩M。、、、分別為截面半徑、截面高度、軸向長度以及硅膠層壁厚,為彎曲曲率半徑。
由力矩平衡可知

計算氣壓驅動力矩可得
式中為截面高度方向局部坐標,mm;為極坐標,rad。
另外,阻力矩M可以分為兩部分積分求解。0到高處,軸向伸長比為
高到最高點處,軸向伸長比為
分別將軸向伸長比,代入式(9)中,可求得對應的硅橡膠應力σ與σ。由式(7)可得變形后硅膠層厚度則阻力矩M為

式中σ為硅橡膠在0到處產生的應力,MPa;σ為硅橡膠在到最高點處產生的應力,MPa;為壁厚方向局部坐標,mm。
由方程(10)-(14)可得輸入氣壓與彎曲角度之間的關系為
注:為輸入壓力,MPa;F為硅橡膠拉伸應力,N;為旋轉軸;M為氣壓產生的驅動力矩,N·mm;M為硅橡膠拉伸產生的阻力矩,N·mm;為彎曲曲率半徑,mm;為截面半徑,mm;為截面高度,mm;為軸向長度,mm;為壁厚,mm;d為高度方向微分,mm;d為極坐標角度微分,rad;d為壁厚方向微分,mm。
Note:is input pressure, MPa;Fis stretch stress generated by silicon rubber, N;is rotation axis;Mis driving torque generated by input pressure, N·mm;Mis resistance torque generated by stretch of silicon rubber, N·mm;is curvature radius of bending, mm;is sectional radius, mm;is sectional height, mm;is axial length, mm;is wall thickness, mm; dis differential along height, mm; dis differential of polar angle, rad; dis differential along wall thickness, mm.
圖5 彎曲模型理論原理圖
Fig.5 Schematic diagram of bending model
通過代入不同指關節的幾何參數(,,,),獲得了各個腔室的輸出角位移θ。根據試驗測試,發現每個指關節的充氣變形對其他指關節幾乎沒有任何影響,因此可認為鉸鏈間作用力沒有對彎曲變形影響的分力,鉸鏈作用力可近似認為與兩相鄰旋轉軸連線重合。各指關節均可利用方程(15)求解。由于理論模型較為復雜,本文利用MATLAB進行數值積分求解。
2.3 自由端位姿
由于指關節間完全獨立,相當于一個串聯連續體機器人系統。求得每個指關節的彎曲角度,可以采用D-H法建立指關節之間的坐標關系。對整體驅動器進行分析,將關節空間映射到直角坐標系[30-31]。
以驅動器末端建立定參考系,第個指關節彎曲角度為θ,可得相鄰兩指關節坐標系的齊次變換矩陣T-1為
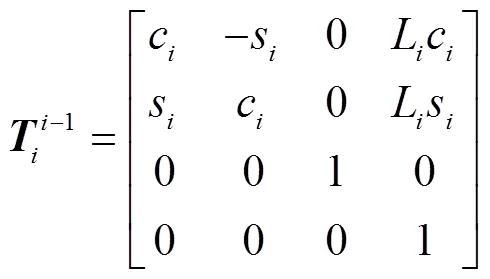
式中c=cos;s=sin;L為第段連桿長度,mm。
此外,任一指關節坐標系對于定參考系的齊次變換矩陣T0為
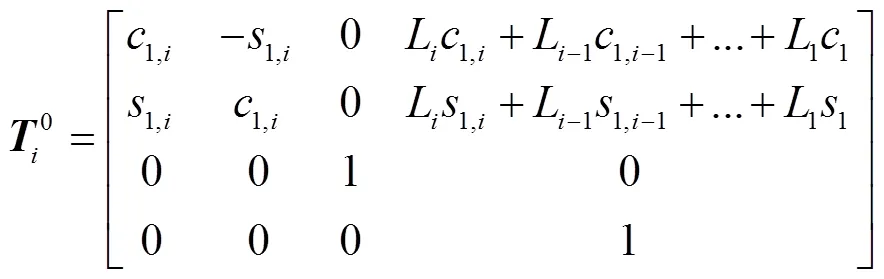
式中sin1,i=sin(1+2+…+);cos1,i=cos(1+2+…+);θ為第個指關節彎曲角度,rad。
3 設計參數分析與優化
3.1 設計參數分析
在決定了軟體驅動器的結構后,需要確定驅動器的各項幾何設計參數尺寸值以完成實物原型的制造。首先通過應力應變拉伸試驗獲得了所選硅橡膠PS6600-10A的應力應變曲線[32]。對測試數據進行處理分析,獲得了Yeoh應變能模型中的材料特性系數,10=4.94×10-2,20=?8.75×10-3,30=4.41×10-2。根據前文建立的驅動器數學模型分析可知,截面半徑、截面高度、軸向長度、壁厚4項幾何參數是驅動器變形主要影響因素,因而將這4項幾何參數作為設計參數。使用驅動器數學模型,在軟體驅動器彎曲角度分別為50°、100°和150°時,計算獲得了不同設計參數值對所需輸入氣壓大小的影響并繪制了對比曲線,如圖6所示。驅動器初始參數值分別為=10 mm,=5 mm,=100 mm,=5 mm。
圖6a為截面半徑達到設定彎曲角度對所需輸入氣壓的影響曲線圖。可以發現截面半徑越大,所需氣壓越小,即驅動器更容易彎曲。圖6b為截面高度達到設定彎曲角度對所需輸入氣壓的影響曲線圖。由圖可知在彎曲角度較小時,截面高度對驅動器的彎曲性能影響較小。彎曲角度越大,影響越大。整體趨勢為增大,所需氣壓力也平緩增大。圖6c為軸向長度達到設定彎曲角度對所需輸入氣壓的影響曲線圖。當軸向長度較小時,對驅動器彎曲影響極大,的值越大,所需壓力越小,驅動器更易達到預期角度。當超過50 mm時,其對應壓力值迅速降低,且不同值幾乎不會對彎曲性能產生影響。圖6d為壁厚達到設定彎曲角度對所需輸入氣壓的影響曲線圖。壁厚越大,對應輸入壓力值越大,驅動器越難彎曲。
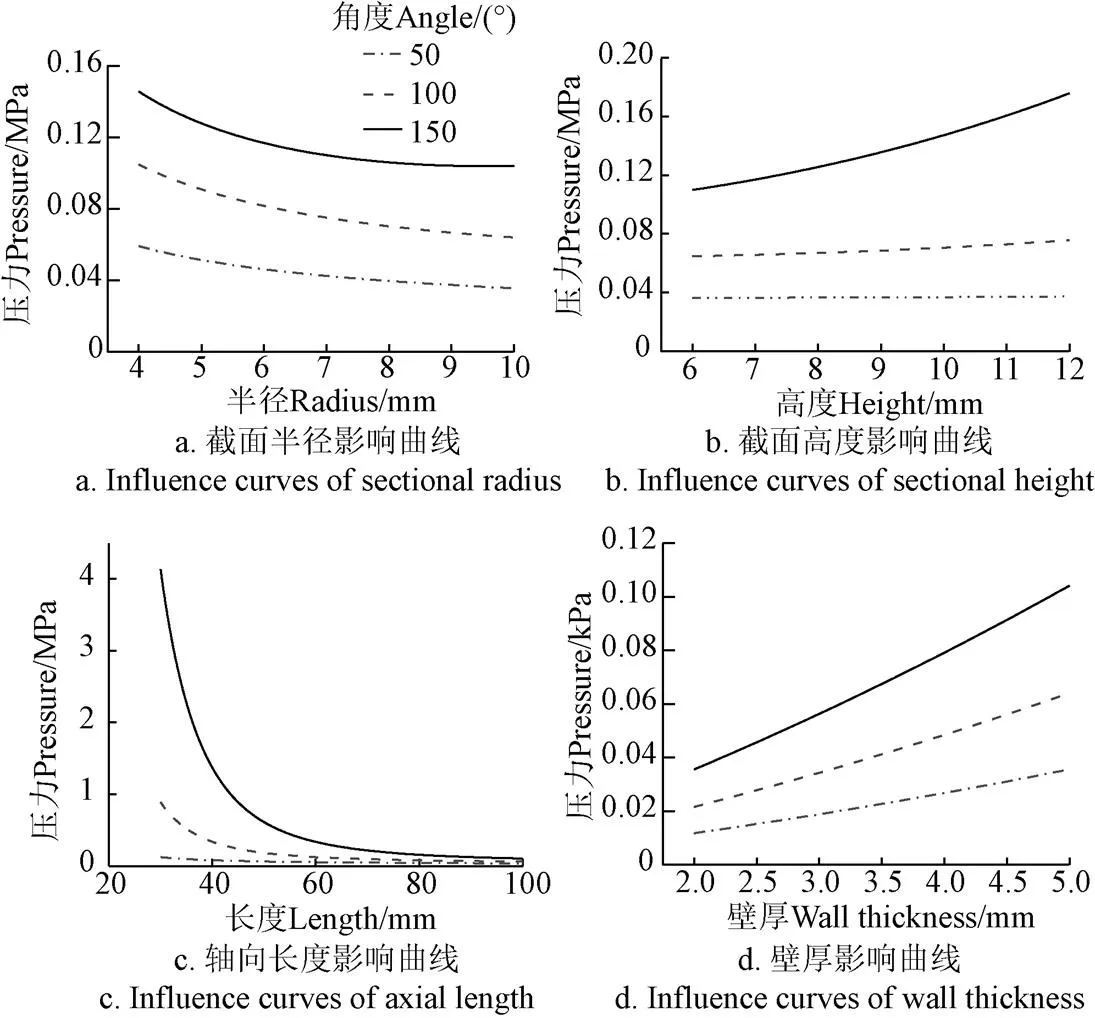
注:驅動器初始參數值分別為截面半徑為10 mm,截面高度為5 mm,軸向長度為100 mm,壁厚為5 mm。
綜合以上所有結果,截面半徑與軸向長度越大,驅動器更易彎曲;截面高度與壁厚越大,驅動器越難彎曲。從整體來看,在相同設計參數下,驅動器的彎曲角度越大,所需輸入壓力越大。但越大的設計參數則會增加驅動器的尺寸與質量,而過小的幾何參數則不能對較大尺寸物體進行抓取。因此綜合各項因素影響,采用適當的優化算法,獲得合適的設計參數尺寸值。
3.2 設計算法
為了確定軟體驅動器的設計參數值,本文建立了一套優化迭代算法。給出確定輸入氣壓,以及期望的驅動器自由端位姿矩陣,由優化設計程序輸出滿足要求的截面半徑、截面高度、軸向長度與壁厚的尺寸值。為了減小驅動器的質量,提高靈巧性,選擇以“驅動器整體質量最小”為優化目標,從輸出值中尋得最優解,確定設計參數值。根據實際需求,各設計參數的尺寸取值范圍如表1所設。
優化設計流程如圖7所示,首先給出Yeoh模型材料應變能函數系數10,20,30。由于驅動器的弧度已確定,縱向角度為,橫向角度為,則只需確定每個指端的第一個指關節設計參數值。設定每個指段由5個指關節組成。所有指關節的軸向長度與壁厚相同。具體設計步驟如下所示。

表1 軟體驅動器設計參數取值范圍
步驟1:給定每個指段的輸入氣壓in,以及期望的驅動器自由端位姿矩陣。根據之前設定的各項與數值,反解獲得各個指關節的彎曲角度θ。

步驟4:引入驅動器整體質量方程(18),對目標優化函數取最小值,則輸出驅動器各設計參數值。內骨骼的密度與體積分別為與V,硅橡膠分別為與V。

式中m為驅動器整體質量,kg。
應用設計的優化迭代算法,分別獲得了各指段設計參數的幾何值,如表2所示。
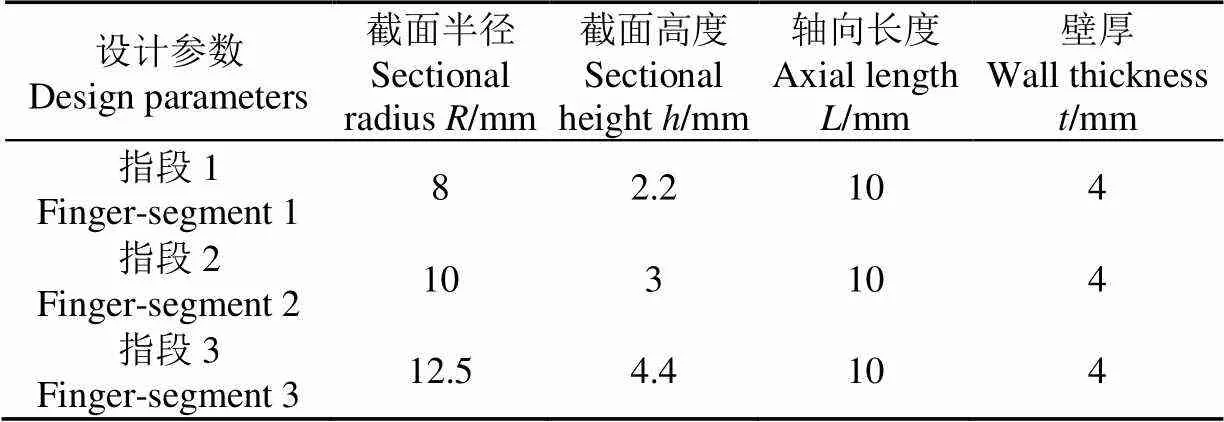
表2 軟體驅動器設計參數值
4 試驗驗證
4.1 驅動器彎曲角度
根據之前確定的設計參數值,制作了軟體驅動器的實物原型。為了驗證理論模型的正確性,基于SIMULINK采集控制平臺,設計了如圖8所示試驗方案來測量彎曲角度。
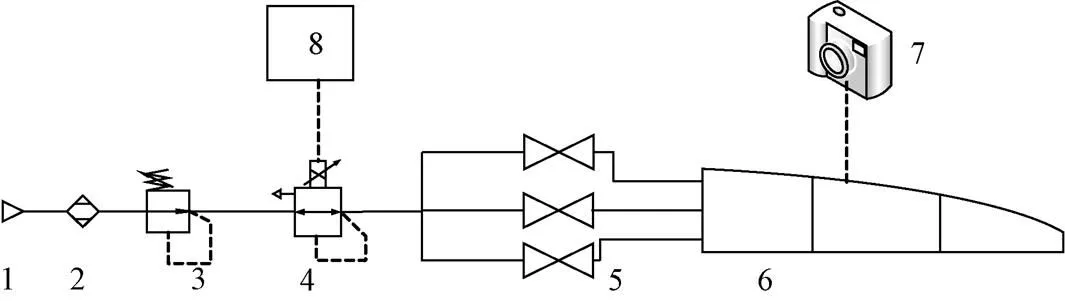
1.氣源 2.干燥器 3.減壓閥 4.比例壓力閥 5.截止閥 6.軟體驅動器 7.高清攝像機 8.采集控制系統
通過工控機調節比例壓力閥(SMC,ITV0030-3ML,1kPa)的輸入電壓,來控制對應氣壓下驅動器的彎曲角度。在驅動器表面每個鉸鏈軸處作有標記,共15標記點。驅動器水平橫置安裝,末端固定,指尖為自由端,一臺高清攝像機AEE-S71實時拍攝下相應的變形照片。3個截止閥分別控制3個指段的輸入氣壓,對每個指段獨立通氣。從初始零狀態開始,每隔5 kPa取一張對應的變形照片,通過計算機標定軟件提取預先作好的標記點坐標,進行數據分析處理獲得3段指段各腔室的彎曲角位移。
根據構建的理論模型公式,使用MATLAB軟件計算出了各指關節的彎曲角度。驅動器自由端彎曲角度與輸入氣壓的試驗和理論對比曲線見圖9。圖9顯示了各指端單獨驅動下自由端的彎曲角度值。從中可見理論值與試驗測量值的變化趨勢是一致的,在壓力小于100 kPa時,理論值與實測值吻合較好,在壓力大于100 kPa后,理論值大于實測值,其差值隨著壓力增大而增大。這主要是由于硅橡膠材料在大變形情況下會呈現出高度的非線性,其應變能函數模型的精確性隨著變形增大而降低。
本文制作了軟體驅動器實物原型,同時拍攝了軟體驅動器分別在3個指段單獨驅動下的彎曲變形照片,顯示驅動器可以完成期望的動作。圖10為指段1單獨驅動實物照片。表3為每個指段獨立驅動時的驅動器自由端彎曲角度的試驗值與理論值相對誤差。軟體驅動器最大工作壓力為150 kPa,在工作壓力范圍內其彎曲角位移總體誤差在9%以內。驅動器的建模誤差主要來源于骨骼關節的摩擦阻尼以及軟體手指的制造精度。本文的理論模型忽略了關節間的摩擦阻力,假設骨骼鉸鏈之間完全光滑。在實際試驗過程中發現摩擦阻尼的影響較大。此外,在軟體手指的制作過程中,硅橡膠的硬度、拉伸性能等受溫濕度影響可能與試驗獲得的材料參數有一定的差異。另外骨骼關節的3D打印精度也會影響到彎曲精度。
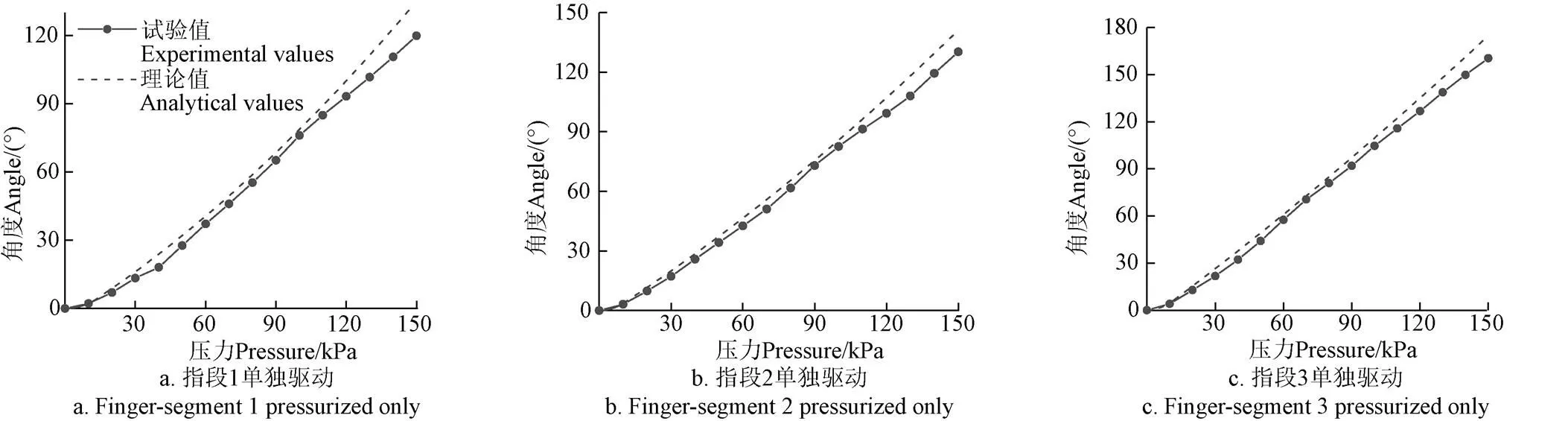
圖9 驅動器自由端彎曲角度

圖10 軟體驅動器指段1單獨驅動彎曲變形實物照片

表3 角位移理論值與試驗值相對誤差
綜合以上因素,在之后的設計中,考略增加骨骼鉸鏈間的摩擦阻尼項,完善驅動器數學模型。試驗并提高驅動器的制作精度。并根據測試數據,對理論模型添加修正系數,進一步提高模型的精確性與有效性,為之后設計的軟體驅動器進行參數優化。
4.2 驅動器剛度
本文提出的軟體驅動器由于設計有內骨骼結構,大幅提高了手指的剛度與夾持能力。為了驗證驅動器的剛度性能,搭建了如圖11所示的試驗平臺,對軟體手指進行了剛度測試。

圖11 驅動器彎曲剛度測試平臺
如圖11所示,軟體手指水平橫向安裝于測試臺上,通過控制比例壓力閥(SMC,ITV0030-3ML,1 kPa)來調節驅動器的輸入氣壓。一臺拉壓傳感器(Zhiqu,DS2-50N,0.01 N)用來測試手指指尖輸出力。當輸入氣壓力時,由于指尖被傳感器測量端所限制,手指彎曲角位移為零,則測得的力值即為手指的最大輸出力。從初始零狀態開始,每隔10 kPa讀取一次拉壓傳感器測量數據,并繪制了不同氣壓下的手指指尖最大輸出力曲線,如圖12所示。
根據之前的彎曲角度試驗,可以得到無外力作用下的軟體手指指尖彎曲角位移。驅動器彎曲剛度為抵抗彎曲變形的能力,定義彎曲剛度為指尖最大輸出力與無外力作用狀態下的彎曲角度的比值,即

表4為在不同氣壓驅動下軟體驅動器的彎曲剛度。可以發現驅動器的彎曲剛度隨著輸入氣壓的增大而增大。在最大工作壓力150 kPa時,彎曲剛度達到最大值4.50 N/rad。相較一般軟體驅動器,本文提出的關節式內骨骼氣動軟體驅動器的彎曲剛度得到了顯著提高,有利于增強其抓持能力。
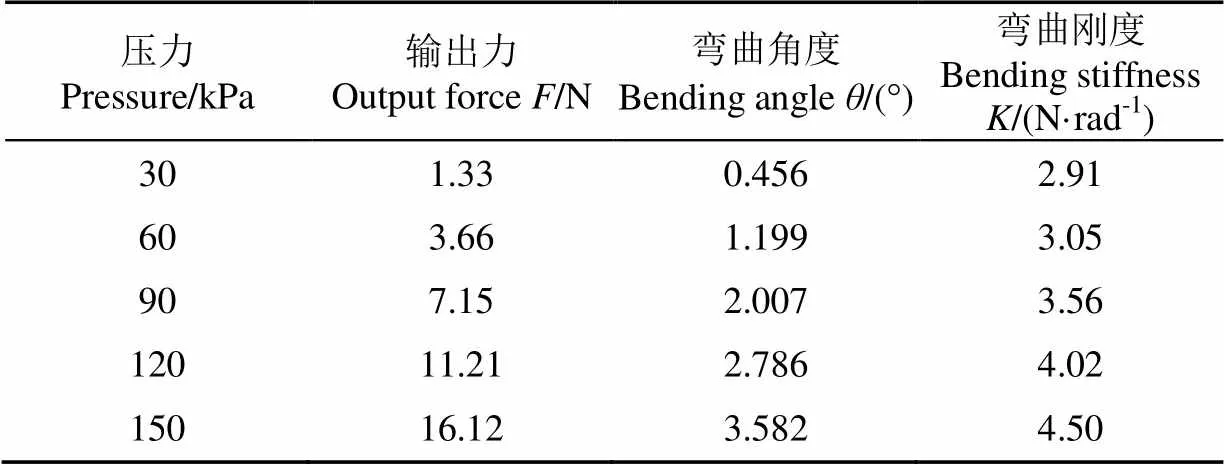
表4 軟體驅動器彎曲剛度
5 結 論
1)提出了一種新型的驅動與承力功能分解的關節式內骨骼軟體驅動器,該驅動器通過氣壓驅動具有徑向纖維約束的軟體硅橡膠材料實現彎曲動作,鉸接式內骨骼主要承受和傳遞抓取力。驅動器剛柔并濟,在保持柔順性的同時,顯著提高了抓持能力。
2)針對所提出的軟體驅動器,建立了氣壓驅動下驅動器的彎曲理論模型,獲得了各指關節彎曲角度與其幾何參數以及輸入氣壓之間的數學關系式,并分析了各項設計參數對驅動器彎曲性能的影響。結果表明截面半徑與軸向長度越大,驅動器更易彎曲;截面高度與壁厚越大,驅動器越難彎曲。
3)根據建立的理論模型,提出了一種軟體驅動器幾何參數的優化設計算法。給出確定輸入氣壓以及期望的驅動器自由端端位姿矩陣,優化了指段截面半徑、截面高度、軸向長度與壁厚的尺寸值。并搭建了試驗平臺,測得了驅動器的彎曲角度與彎曲剛度。最大工作壓力150 kPa時,其彎曲角位移總體誤差在9%以內,建模誤差主要來源于骨骼關節的摩擦阻尼及手指的制造精度。驅動器的彎曲剛度隨氣壓增大而增大,最高可達4.50 N/rad。相較一般軟體驅動器,彎曲剛度得到了顯著提高,增強了抓持能力
研究結果表明,本文提出的新型內骨骼氣動軟體驅動器結構研制是成功的,具有良好的應用前景。
[1] Kim S, Laschi C, Trimmer B. Soft robotics: A bioinspired evolution in robotics[J]. Trends in Biotechnology, 2013, 31(5): 287-294.
[2] Bartlett N W, Tolley M T, Overvelde J T B, et al. A 3D-printed, functionally graded soft robot powered by combustion[J]. Science, 2015, 349(6244): 161-165.
[3] Albu-Schaffer A, Fischer M, Schreiber G, et al. Soft robotics: What Cartesian stiffness can obtain with passively compliant, uncoupled joints?[C]//IEEE/RSJ International Conference on Intelligent Robots & Systems. IEEE, 2005.
[4] 曹玉君,尚建忠,梁科山,等. 軟體機器人研究現狀綜述[J]. 機械工程學報,2012,48(3):25-33.
Cao Yujun, Shang Jianzhong, Liang Keshan, et al. Review of soft-bodied robots[J]. Journal of Mechanical Engineering, 2012,48(3): 25-33. (in Chinese with English abstract)
[5] 何斌,王志鵬,唐海峰. 軟體機器人研究綜述[J]. 同濟大學學報:自然科學版,2014,42(10):1596-1603.
He Bin, Wang Zhipeng, Tang Haifeng. Review of soft robot[J]. Journal of Tongji University: Natural Science, 2014, 42(10): 1596-1603. (in Chinese with English abstract)
[6] 張進華,王韜,洪軍,等. 軟體機械手研究綜述[J]. 機械工程學報,2017,53(13):19-28.
Zhang Jinhua, Wang Tao, Hong Jun, et al. Review of soft-bodied manipulator[J]. Journal of Mechanical Engineering, 2017, 53(13):19-28. (in Chinese with English abstract)
[7] Wang Z, Torigoe Y, Hirai S. A prestressed soft gripper: Design, modeling, fabrication, and tests for food handling[J]. IEEE Robotics and Automation Letters, 2017, 2(4): 1909-1916.
[8] Wang Z, Chathuranga D S, Hirai S. 3D printed soft gripper for automatic lunch box packing[C]// IEEE International Conference on Robotics & Biomimetics, 2017.
[9] Martinez R V, Branch J L, Fish C R, et al. Robotic tentacles with three-dimensional mobility based on flexible elastomers[J]. Advanced Materials, 2013, 25(2): 205-212.
[10] Connolly F, Walsh C J, Bertoldi K. Automatic design of fiber-reinforced soft actuators for trajectory matching[J]. Proceedings of the National Academy of Sciences, 2017, 114(1): 51-56.
[11] Ilievski F, Mazzeo A D, Shepherd R F, et al. Soft robotics for chemists[J]. Angewandte Chemie, 2015, 123(8): 1930-1935.
[12] Mosadegh B, Polygerinos P, Keplinger C, et al. Soft robotics: Pneumatic networks for soft robotics that actuate rapidly[J]. Advanced Functional Materials, 2014, 24(15): 2109.
[13] 鞠爾男,武力,馮銘龍. 多腔氣囊式三層結構軟體手指的研制[J]. 大連交通大學學報,2018,39(4):66-69.
Ju Ernan, Wu Li, Feng Minglong. Development on three dimension model of mould pneumatic soft-bodied finger[J]. Journal of Dalian Jiaotong University, 2018, 39(4): 66-69. (in Chinese with English abstract)
[14] Giannaccini M E, Georgilas I, Horsfield I, et al. A variable compliance, soft gripper[J]. Autonomous Robots, 2014, 36(1/2): 93-107.
[15] Polygerinos P, Galloway K C, Sanan S, et al. EMG controlled soft robotic glove for assistance during activities of daily living[C]//2015 IEEE International Conference on Rehabilitation Robotics (ICORR), 2015.
[16] Polygerinos P, Wang Z, Overvelde J T B, et al. Modeling of soft fiber-reinforced bending actuators[J]. IEEE Transactions on Robotics, 2015, 31(3): 778-789.
[17] Deimel R, Brock O. A compliant hand based on a novel pneumatic actuator[C]//Robotics and Automation (ICRA), 2013 IEEE International Conference on, 2013.
[18] 魏樹軍,王天宇,谷國迎. 基于纖維增強型驅動器的氣動軟體抓手設計[J]. 機械工程學報,2017,53(13):29-38.
Wei Shujun, Wang Tianyu, Gu Guoying. Design of a soft pneumatic robotic gripper based on fiber-reinforced actuator[J]. Journal of Mechanical Engineering, 2017, 53(13): 29-38. (in Chinese with English abstract)
[19] Yi J, Chen X, Song C, et al. Fiber-reinforced origamic robotic actuator[J]. Soft Robotics, 2018, 5(1):81-92.
[20] Sun Z S, Guo Z H, Tang W. Design of wearable hand rehabilitation glove with soft hoop-reinforced pneumatic actuator[J]. Journal of Central South University, 2019, 26(1): 106-119.
[21] Yap H K, Lim J H, Nasrallah F, et al. A soft exoskeleton for hand assistive and rehabilitation application using pneumatic actuators with variable stiffness[C]//IEEE International Conference on Robotics & Automation. IEEE, 2015.
[22] Loh C T, Tsukagoshi H. Pneumatic Big-hand gripper with slip-in tip aimed for the transfer support of the human body [C]//2014 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2014.
[23] Margheri L, Laschi C, Mazzolai B. Soft robotic arm inspired by the octopus: I. From biological functions to artificial requirements[J]. Bioinspiration & Biomimetics, 2012, 7(2): 025004.
[24] Homberg B S, Katzschmann R K, Dogar M R, et al. Haptic identification of objects using a modular soft robotic gripper [C]//IEEE International Conference on Intelligent Robots and Systems. 2015: 1698-1705.
[25] 李忱,楊桂通,黃執中. 各向同性彈性介質非線性本構方程[J]. 工程力學,2010,27(增刊1):1-5.
Li Chen, Yang Guitong, Huang Zhizhong. On constitutive equations of isotropic non-linear elastic medium[J]. Engineering Mechanics, 2010, 27(Supp.1): 1-5. (in Chinese with English abstract)
[26] 徐立,吳桂忠. 有限元分析中橡膠應變能函數的若干形式[J]. 橡膠工業,1999,46(12):707-711.
Xu Li, Wu Guizhong. Some forms of strain energy function for rubber with finite element analysis[J]. China Rubber Industry, 1999, 46(12): 707-711. (in Chinese with English abstract)
[27] 燕山,王偉. 橡膠類超彈性本構模型中材料參數的確定[J]. 橡膠工業,2014,61(8):453-457.
Yan Shan, Wang Wei. Determination of material parameters for rubberlike hyperelastic constitutive models[J]. China Rubber Industry, 2014, 61(8): 453-457. (in Chinese with English abstract)
[28] 黃建龍,解廣娟,劉正偉. 基于Mooney-Rivlin和Yeoh模型的超彈性橡膠材料有限元分析[J]. 橡塑技術與裝備,2008,34(12):22-26.
Huang Jianlong, Xie Guangjuan, Liu Zhengwei. Finite element analysis of super-elastic rubber materials based on the Mooney-Rivlin and Yeoh model[J]. China Rubber/Plastics Technology and Equipment, 2008, 34(12): 22-26. (in Chinese with English abstract)
[29] Kim B, Lee S B, Lee J, et al. A comparison among Neo-Hookean model, Mooney-Rivlin model, and Ogden model for chloroprene rubber[J]. International Journal of Precision Engineering & Manufacturing, 2012, 13(5): 759-764.
[30] 熊有倫. 機器人技術基礎[M]. 北京:機械工業出版社,1996.
[31] 趙志剛,陳志剛. 柔性氣動連續體機器人關節結構設計與運動學分析[J]. 機械科學與技術,2015,34(2):184-187.
Zhao Zhigang, Chen Zhigang. Mechanism design and kinematics analysis of pneumatic soft continuum robot joint[J]. Mechanical Science and Technology for Aerospace Engineering, 2015, 34(2): 184-187. (in Chinese with English abstract)
[32] 李樹虎,賈華敏,李茂東,等. 超彈性體本構模型的理論和特種試驗方法[J]. 彈性體,2011,21(1):58-64.
Li Shuhu, Jia Huamin, Li Maodong, et al. Theory and testing method of hyperelastic material constitutive model[J]. China Elastomerics, 2011, 21(1): 58-64. (in Chinese with English abstract)
Structure design of pneumatic soft actuator with jointed endoskeleton
Wu Zhaoping, Li Xiaoning, Guo Zhonghua
(,,210094,)
Soft actuators are suitable for gripping fragile and delicate objects with irregular shapes and sizes owing to their high flexibility and have become a current research focus. But current soft actuators have a general problem of insufficient gripping force. To grip objects with different mass and sizes on assembly line safely and reliably, a novel pneumatic soft actuator with jointed endoskeleton structure was developed which separated the actuation and force bearing function. The bending action of the actuator was performed by the soft rubber with embedded radial-restrained fiber through pneumatic actuating, while the gripping force was bore and transferred by means of the jointed endoskeleton. To obtain the pose of free-end of the soft actuator, the theoretical model was built up. Firstly, the strain energy function of silicon rubber (Yeoh model) was used for deducing the stress and strain. Secondly, the relation between bending angle and input pressure was analyzed. Then the pot matrix of the free-end could be acquired through D-H method. Moreover, to determine the size parameters to facilitate the prototype, the sectional radius, the sectional height, the axial length and the wall thickness were chosen as the design parameters to analyze. The influences for bending of the actuator were discussed. The results showed that the input pressure reduced along with the increase of the sectional radius and the axial length while increased with the increase of the sectional height and the wall thickness. Furthermore, an optimization design algorithm was developed based on the theoretical model. At first, the strain-stress curve of the silicon rubber was measured by tensile test and the coefficients of Yeoh model were obtained. The determined pressure and the expected pose of the free-end were defined as the input while the minimum weight was the optimization target. Then 4 key design parameters could be calculated by the algorithm. With the obtained design parameters, the soft actuator was fabricated and relevant experiments were conducted. An experimental platform was developed to test the bending angle of the soft actuator. Through the experiment, the bending angle of the free-end pressurized by each finger-segment only was measured. The variation trend of experimental data was consistent with that of theoretical ones. When the input pressure was below 100 kPa, the theoretical curves coincided with the experimental curves. But when the input pressure was larger than 100 kPa, the theoretical curves were above the experimental curves. The reason was that the silicon rubber presented a high nonlinearity at a large deformation. The maximum difference was less than 9% with maximum working pressure 150 kPa. The modeling error was mainly originated from the friction damping of the endoskeleton joints and the fabrication precision of the soft finger. Therefore, the friction damping term should be considered to improve the theoretical model and a correction coefficient should be added. Another test platform was put up to measure the bending stiffness of the soft actuator. The tip of the actuator could generate maximum output force while it was entirely constrained without bending motion. Then the bending stiffness was defined as the radio of the maximum output force and the bending angle without external force. From the experiment, it indicated that the bending stiffness increases with the increase of the pressure and it could reach up to 4.5 N/rad at the largest working pressure. The bending stiffness was improved significantly and the flexibility was remained. The soft actuator is successful and promising in future development and application.
design; optimization; soft actuator; pneumatic; endoskeleton; stiffness; flexibility
10.11975/j.issn.1002-6819.2019.15.003
TH138
A
1002-6819(2019)-15-0017-08
2019-03-13
2019-07-15
國家自然科學基金(51305202);江蘇省自然科學基金(BK20130764)
武兆平,博士生,主要從事軟體驅動器方面的研究。Email:wuzhaoping008@sina.com
武兆平,李小寧,郭鐘華. 關節式內骨骼氣動軟體驅動器的結構設計[J]. 農業工程學報,2019,35(15):17-24. doi:10.11975/j.issn.1002-6819.2019.15.003 http://www.tcsae.org
Wu Zhaoping, Li Xiaoning, Guo Zhonghua. Structure design of pneumatic soft actuator with jointed endoskeleton[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(15): 17-24. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.15.003 http://www.tcsae.org
猜你喜歡
中華詩詞(2020年1期)2020-09-21 09:24:52
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36