基于毫米波雷達的多旋翼無人機避障技術研究
2019-09-27 11:31:12潘梟王偉華錫焱房德國
中小企業管理與科技·下旬刊 2019年7期
關鍵詞:無人機
潘梟 王偉 華錫焱 房德國

【摘 要】:隨著無人機技術的發展,無人機已廣泛應用于生產生活的各個方面。無人機智能飛行研究已成為當下研究的熱點,無人機避障技術的研究增加了無人機智能飛行的可實施性。為了更好地研究無人機避障技術,論文提出了一種基于毫米波雷達的多旋翼無人機避障技術的設計方案。此方案通過機載避障傳感器毫米波雷達來實現多旋翼無人機避障功能,另外,無人機上同時需搭載IMU、GPS、地磁等傳感器,以保證無人機的穩定飛行。
【Abstract】With the development of UAV technology, UAV has been widely used in all aspects of production and life. The research of UAV intelligent flight has become the focus of current research, and the research of UAV obstacle avoidance technology increases the feasibility of UAV intelligent flight. In order to better study the obstacle avoidance technology of UAV, a design scheme of multi-rotor UAV obstacle avoidance technology based on millimeter wave radar is proposed in this paper. In this scheme, the millimeter wave radar of airborne obstacle avoidance sensor is used to realize the obstacle avoidance function of multi-rotor UAV. In addition, IMU, GPS, geomagnetism and other sensors are needed to ensure the stable flight of UAV.
【關鍵詞】無人機;避障;毫米波雷達;傳感器
【Keywords】 UAV; obstacle avoidance; millimeter wave radar; sensor
【中圖分類號】TP27? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?【文獻標志碼】A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 【文章編號】1673-1069(2019)07-0170-03
1 引言
無人機的出現,實現了地面向天空的變革。近年來,人們利用無人機進行電力巡檢、運輸物流、航拍等重大活動,又因無人機避障技術的發展,使得無人機逐步擺脫傳統“飛手”對飛機的實時操縱,這便給整個無人機市場帶來了巨大的變革。目前,無人機主要依靠機載避障傳感器來識別環境中的障礙物。在我國無人機避障的傳感器主要可以劃分為被動式和主動式兩大類。其中,被動式感知環境的傳感器主要采用的是CMOS和CCD等光學傳感器[1],主動式感知環境的傳感器主要有超聲波傳感器、激光雷達、毫米波雷達等。超聲波避障技術主要是采用超聲波獲得無人機的飛行環境信息,對障礙物的距離、方向、角度等進行判斷。利用了聲波反射測距原理,該方法的優點就是技術成熟,成本很低,但缺點在于作用距離近。激光雷達傳感器可以獲取飛行環境信息,然后再通過對障礙物的距離、角度等信息進行計算。激光雷達與超聲波傳感器相比,前者測量距離遠、方向性好、精度高、抗干擾力強,但價格昂貴,成本高,遇惡劣天氣時性能會嚴重下降。相比較之下,毫米波雷達傳感器具有體積小、功耗低、作用距離遠、穿透霧、煙、灰塵能力強,因而毫米波雷達已經較為廣泛地運用于各行各業[2]。本文介紹了一種基于毫米波雷達的多旋翼無人機避障技術研究的工程設計方案,計算量小,效果顯著,在小型多旋翼無人機的市場應用上具有很大的潛力。
2 系統組成
多旋翼無人機上搭載了IMU、GPS、地磁、毫米波雷達等傳感器系統,另機載無人機控制核心飛控模塊,用于記錄多旋翼無人機飛行實時數據的數據模塊。IMU傳感器內置加速度計、陀螺儀、氣壓計。陀螺儀測得的角速度信息、加速度計測得的加速度信息以及氣壓計測得的高度信息傳送給飛控,由飛行計算機計算出從機體坐標系到參考坐標系之間的轉換矩陣,再通過這個矩陣把三軸加速度分量從機體坐標系轉移到參考坐標系上,通過積分計算出速度和位移,再將速度和位移與輔助導航系統(GPS傳感器和氣壓計傳感器)的數據進行比較。在這個過程中可以利用轉換矩陣進行無人機的姿態角解算,從而能夠準確得出無人飛行器的速度和位置。基于無人機有一個穩定可靠的飛控系統后,為增添無人機智能飛行的可實施性,需機載避障傳感器。本文介紹的基于毫米波雷達的多旋翼無人機避障技術研究主要使用的是毫米波雷達傳感器,機載各個傳感器通過CAN通信方式與飛控進行數據傳輸。
3 障礙物探測硬件設計
3.1 毫米波雷達及其探測原理
毫米波雷達,指工作在毫米波頻段的雷達。毫米波是一種波長在1~10mm,頻域在30~300GHz的電磁波。雷達一般工作模式分為Pulsed(脈沖方式)和FMCW調頻連續波方式[3]。脈沖工作方式往往要求雷達在很短時間里發射大功率的信號脈沖,硬件上收發天線往往是共用的,這樣便會容易導致出現探測盲區。連續波雷達是發射連續波信號,主要用來測目標的速度。調頻連續波方式,能夠同時測量目標的距離,對比脈沖工作方式的硬件,其收發天線中間會有一定的間隔,基本不存在探測盲區。針對FMCW方式,雖然發射頻率不斷改變,但是頻率變化率保持不變,只需對發射和反射回來的信號做互相關,通過檢測這個頻率差fb和頻移fd,推算出距離和速度。公式如下:
式中:s為距離,v為速度,c為光速,T為信號發射周期,Δf為調頻帶寬,fb為差拍頻率,λ為信號波長,fd為多普勒頻移。
3.2 硬件連接
本設計選用的是一款莫之比有限公司的避障雷達傳感器,77GHz毫米波避障雷達,雷達波束窄,能量居中,可減少無人機傾斜姿態工作時的地雜波干擾,抗干擾能力強:不受光線、天氣、環境噪聲影響,不受無人機電磁干擾的影響,能探測到35m以外的障礙物。數據接口支持UART和CAN口兩種方式。本設計采用的是CAN口通信方式。需注意的是,此款雷達一旦探測距離無限遠便輸出負值。實物及飛機連接圖如圖1所示。毫米波雷直接通過CAN將數據實時傳給飛控,目標刷新頻率為50Hz。
4 軟件設計
4.1 軟件設計流程
無人機系統上電后開始進行自檢,當飛機檢測到機載所有傳感器正常工作并且避障傳感器毫米波雷達所探測到無人機前方無障礙物或者障礙物在安全距離內,無人機系統自檢通過。無人機上位機軟件對無人機進行打點操作。打點操作是為了對無人機進行路徑規劃,在無人機規劃路徑內人為地設置障礙物。無人機執行自主起飛操作后按規劃軌跡飛行,障礙物在安全距離內,無人機按規劃軌跡安全飛行。小于安全距離,無人機按指定策略避開障礙物后,重新會到原設定軌跡繼續飛行,直至到達最終目標點。避障流程如圖2所示。
4.2 毫米波雷達避障策略
無人機起飛后毫米波雷達開始檢測障礙物的距離,不斷地對傳給飛控的距離信息進行判斷,如果距離信息大于飛控設定的安全距離20m(安全距離可以人為設定),無人機按照規劃軌跡安全飛行,如果無人機雷達探測到障礙物距離小于20m大于14m,無人機開始減速,飛行速度不大于3m/s,若探測到障礙物距離小于14m且大于8m,飛機速度不大于1m/s。當距離小于8m,無人機停止前進,飛行速度降為0,懸停于空中,此時無人機開始做轉頭處理,為了進行后續解釋,在此定義一個機體坐標系,它是一個正交的坐標系且符合右手螺旋定則,為了方便角度識別,定義機頭的方向為X軸正半軸,轉頭處理是以機頭所在X軸方向順時針旋轉90°,逆時針旋轉90°,毫米波雷達在飛機轉頭的這一過程做距離探測,若檢測到在無人機機頭順時針方向有障礙物則向逆時針進行躲避障礙物處理,反之,若檢測到在無人機機頭逆時針方向有障礙物則向順時針進行躲避障礙物處理。躲避障礙物后重新回歸初始設定軌跡繼續飛行,并不斷重復上述操作,直至無人機按照規定軌跡飛到最終目標點。
4.3 實驗結果
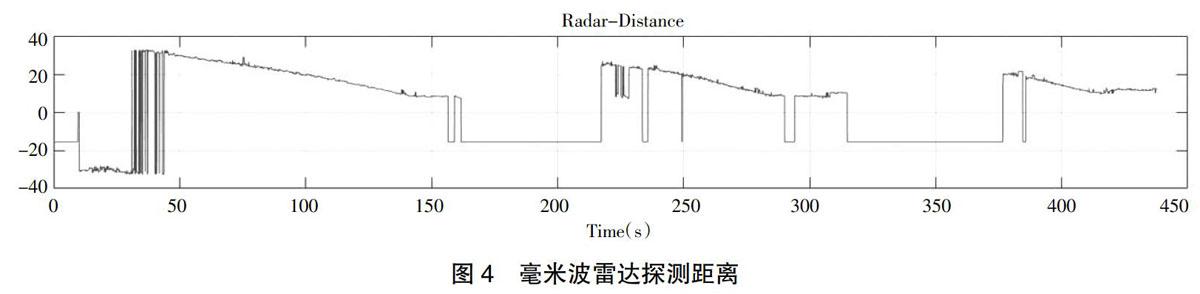
無人機躲避障礙物上位機顯示軌跡如圖3所示。A點為無人機起飛點,B點為無人機降落點。A、B之間有兩個障礙物,多旋翼無人機探測到障礙物并到達指定避障距離時,開始懸停做轉頭動作,然后按照上述避障策略執行避障,軌跡如圖3所示。可清楚地看見無人機在遇到第一個障礙物時向空曠的非障礙物側避障,第二個障礙物同樣如此。在繞過障礙物后,無人機繼續按照規定軌跡飛行,直至到達最終目標點。毫米波雷達探測距離如圖4所示,無人機起飛時第一個障礙物距飛機大概在36m,無人機沿規劃軌跡飛行,距障礙物距離越來越近,當距離小于8m時停止飛行,執行避障,成功避障后回到初始設定軌跡,此時第二個障礙物距飛機大概30m,屬于飛機安全飛行距離,無人機正常飛行,直至距第二個障礙物8m時,執行避障,成功避障后回到原軌跡,繼續飛行直至完成飛行任務。
5 結語
本文以多旋翼無人機為例,提供了一種基于毫米波雷達的多旋翼無人機避障技術研究方法,首先概述了系統機構,然后研究了避障傳感器毫米波雷達的工作原理及連接方式以及軟件設計方案和避障策略,最后給出本設計的實際實驗結果。本方案已通過大量實驗,對于多旋翼無人機避障研究具有重要意義,在無人機避障市場上具有很大的應用前景。
【參考文獻】
【1】陳洪攀.基于毫米波雷達與單目視覺融合的無人機自主避障系統[D].西安:西安電子科技大學,2018.
【2】劉玉超,梅亨利,王景.車載毫米波雷達頻率劃分和產品現狀分析[J].科技與創新,2017,8(3):70-71.
【3】郭蓬,郭劍銳,戎輝,等.毫米波雷達研究現狀及測試項目[J].汽車電器,2018,10(10):33-35.
猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32
電子技術與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26
