遙控履帶車車架有限元模態分析
2019-09-27 11:31:12施炎
中小企業管理與科技·下旬刊 2019年7期
關鍵詞:有限元法
施炎

【摘 要】履帶車在行駛的過程中常承受多源復雜激勵作用而產生振動,影響履帶車監控性能及工作壽命。以全國大學生市級創新訓練項目“電磁輻射實時監控無人車”為例,借助三維建模軟件Solidworks建立其三維模型,而后將車架模型導入ANSYS有限元分析軟件中進行離散化處理,并基于Block Lanczos算法求解車架振動模態。分析結果表明,小車固有的模態不會與小車特征頻率合拍,不會產生共振問題。
【Abstract】 Tracked vehicles often suffer from multi-source complex excitation during driving, which results in vibration, and affects the monitoring performance and working life of tracked vehicles. Taking the municipal innovation training project "Real-time monitoring of electromagnetic radiation unmanned vehicle" as an example, the three-dimensional model of the unmanned vehicle is established by using the three-dimensional modeling software Solidworks, then the frame model is imported into ANSYS finite element analysis software for discretization, and the vibration mode of the frame is solved based on the Block Lanczos algorithm. The analysis results show that the inherent modes of the vehicle? do not match the characteristic frequencies of the vehicle, and there is no resonance problem.
【關鍵詞】履帶車;車架;三維建模;振動模態;有限元法
【Keywords】tracked vehicle; frame; three-dimensional mode of vibration; vibration mode; finite element method
【中圖分類號】U463.6? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 【文獻標志碼】A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 【文章編號】1673-1069(2019)07-0175-03
1 引言
履帶車在行駛的過程中會受到各種激勵作用,如路面不平造成的位移激勵,電機轉子存在偏心造成的內部激勵等。車架作為整車的骨架,連接著各個機構總成,支撐整車的重量,承受外部荷載的作用,因此車架必須具有足夠的剛度和強度來承受車自身的載荷和來自外部的沖擊。
模態分析是研究車輛結構動力學性能的一個重要方法。理論上,結構具有多少個自由度,就對應有多少個固有頻率,結構在每一階固有頻率下振動都對應一個固有模態振型。模態分析方法包括計算模態分析和試驗模態分析方法兩種,本文基于ANSYS有限元分析軟件,即采用計算模態方法對履帶車的車架進行模態分析,對其振動特性做出評價。
2 模態分析理論
設n多自由度系統自由振動微分方程:
3 履帶車車架三維建模
根據實際功能要求,在SolidWorks三維建模軟件中對履帶車車架進行建模,模型如圖1所示,并導出x_t格式的模型,將模型導入ANSYS軟件進行前處理。
4 履帶車有限元建模
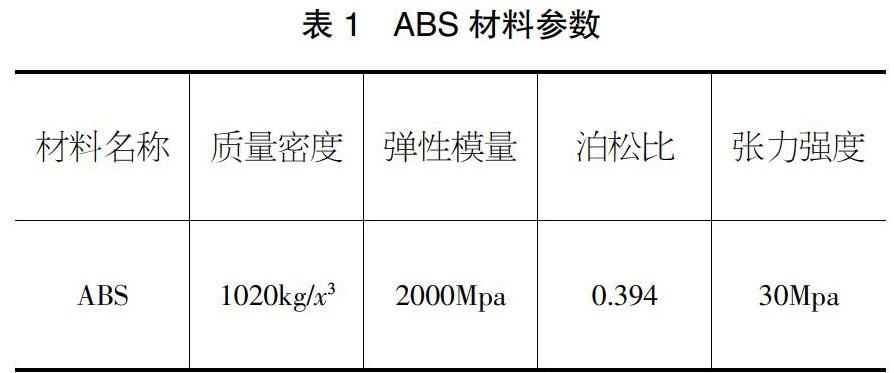
在ANSYS Workbench操作界面中,添加Modal模態分析模塊,將模型導入后,先耦合各零部件,在Mesh模塊中對車架模型進行網格劃分,采用Sizing和Face Meshing兩種劃分方法對網格進行適當加密,網格節點數為315071,單元數為197525。定義車架材料,車架材料為ABS材料,材料屬性如表1所示。
5 履帶車車架模態分析
5.1 履帶車車架自由模態分析結果
基于ANSYS Workbench有限元分析軟件的求解器對履帶車車架進行模態分析,因車架的前六階固有頻率值為0或接近于0,因此可以判斷出前六階模態為剛體模態,代表了履帶車車架的剛體位移,而剛體模態對振動分析并沒有實際意義,所以去除前六階剛體模態,主要針對后四階自由模態振型進行分析,后四階模態振型分析結果如表2所示。因篇幅限制,自由模態分析結果只列出其中非剛體模態中第1階和第4階的模態振型如圖2、圖3所示,各階振型固有頻率與振型描述如表2所示。
5.2 履帶車車架自由模態分析結果評價
由對履帶車車架的前四階自由模態分析結果可知,履帶車的1階振型為扭轉振型,其最大幅值出現在車架側壁后段的上頂角處;2階振型為彎曲振型,其最大幅值出現在車架底盤后段的中心部位;3階振型為側向彎曲振型,其最大幅值出現在車架側壁中后段的上表面;4階振型為側向彎曲振型,其最大幅值出現在車架側壁前段的上頂角處。
5.3 履帶車車架預應力模態分析結果
首先根據履帶車在實際工作過程中的載重情況,將驅動器、電池、攝像頭等儀器的重量添加至車架上,并施加重力場,再將小車的支撐軸固定,研究車架在該預應力情況下的模態振型,其第1階和第6階預應力模態振型如圖4、圖5所示,各階振型固有頻率與振型描述如表3所示。
5.4 履帶車車架預應力模態分析結果評價
由ANSYS Workbench分析出的履帶車車架的預應力分析結果可知,1階振型為車架后段彎曲振型,最大幅值出現在車架底盤后端邊緣中心處;2階振型為車架后段扭轉振型,最大幅值出現在車架側壁后段的上頂角處;3階振型為車架中段彎曲振型,最大幅值出現在車架底盤中部對稱平面處;4階振型為車架后段彎曲振型,最大幅值出現在車架側壁后段的上頂角處;5階振型為車架后段扭轉振型,最大幅值出現在車架最后端的壁面上;6階振型為車架后段扭轉振型,最大幅值出現在車架側壁后段的下頂角處。
假設電機轉子轉動時存在偏心力,履帶車快速行駛速度為1.5m/s,主動輪的直徑為45mm,電機軸與主動輪直接通過聯軸器連接,則激振力的頻率等于電機轉動頻率f=10.610Hz,小于49.599Hz,因此,在滿足相應功能要求下,電機轉動不易與車架產生共振。
6 結論
運用ANSYS Workbench有限元分析軟件對履帶車車架進行模態分析,得到了車架自由模態前4階模態振型和預應力模態前6階模態振型以及各階模態對應的固有頻率,并分析出履帶車車架在各模態振型中運動幅值最大的部位。結合履帶車的實際工作需要,當履帶車以1.5m/s的速度行駛時,電機的運轉頻率f=10.610Hz低于預應力模態中一階頻率49.599Hz。因此,車架固有模態不會與小車工作特征頻率合拍,不會產生共振。
【參考文獻】
【1】任可美,戴作強,鄭莉莉,等.純電動城市客車底盤車架的模態分析與優化[J].制造業自動化,2018,40(01):45-50+64.
【2】潘宇.某車型副車架結構強度與模態分析及結構改進[J].機械強度,2017,39(06):1490-1494.
【3】任錦濤,李建軍,杜明軒.基于ANSYS的車架有限元模態分析[J].汽車實用技術,2019(10):141-142+162.
猜你喜歡
裝備制造技術(2019年12期)2019-12-25 03:06:04
電測與儀表(2016年15期)2016-04-12 00:30:46
專用汽車(2016年8期)2016-03-01 04:16:43
電機與控制應用(2015年1期)2015-03-01 03:49:16
許昌學院學報(2015年5期)2015-02-28 18:20:26
中國衛生標準管理(2015年17期)2015-01-26 21:05:18
計算物理(2014年1期)2014-03-11 17:00:14
振動、測試與診斷(2014年4期)2014-03-01 01:14:06
無錫職業技術學院學報(2013年3期)2013-03-11 19:01:14
船海工程(2013年6期)2013-03-11 18:57:25
