直升機(jī)旋翼轉(zhuǎn)速信號(hào)系統(tǒng)阻抗匹配性技術(shù)研究
2019-10-08 01:02:52陳敏
軍民兩用技術(shù)與產(chǎn)品 2019年9期
關(guān)鍵詞:信號(hào)
陳 敏
(中國(guó)直升機(jī)設(shè)計(jì)研究所,景德鎮(zhèn) 333001)
旋翼系統(tǒng)是直升機(jī)最具特色且不可或缺的重要系統(tǒng),而旋翼轉(zhuǎn)速是直升機(jī)在飛行過(guò)程中非常重要的參數(shù)值,準(zhǔn)確實(shí)時(shí)地指示旋翼轉(zhuǎn)速是飛行員順利完成各種空中執(zhí)勤任務(wù)的前提。某直升機(jī)旋翼轉(zhuǎn)速信號(hào)系統(tǒng)采用磁電式旋翼轉(zhuǎn)速磁傳感器,該傳感器對(duì)安裝在主旋翼軸上隨旋翼同步旋轉(zhuǎn)的音輪進(jìn)行探測(cè),從而產(chǎn)生一個(gè)周期變化的感應(yīng)電動(dòng)勢(shì),輸出正弦波信號(hào),再經(jīng)變換器處理轉(zhuǎn)換為旋翼轉(zhuǎn)速信號(hào),其中旋翼轉(zhuǎn)速與正弦波信號(hào)頻率成正比。在設(shè)計(jì)高頻率的電路系統(tǒng)時(shí),高頻信號(hào)的變化必然會(huì)引起阻抗的突變,一旦系統(tǒng)阻抗發(fā)生變化,信號(hào)就會(huì)在突變處產(chǎn)生信號(hào)衰減、信號(hào)反射、信號(hào)失真等信號(hào)完整性缺失問(wèn)題。根據(jù)這一特性,本文針對(duì)某直升機(jī)旋翼轉(zhuǎn)速信號(hào)系統(tǒng)在正常額定轉(zhuǎn)速下誤報(bào)旋翼轉(zhuǎn)速低故障問(wèn)題,對(duì)旋翼轉(zhuǎn)速信號(hào)系統(tǒng)的阻抗匹配性進(jìn)行了分析及改進(jìn)驗(yàn)證。
1 旋翼轉(zhuǎn)速信號(hào)系統(tǒng)
1.1 系統(tǒng)組成
直升機(jī)旋翼轉(zhuǎn)速信號(hào)系統(tǒng)由兩路旋翼轉(zhuǎn)速磁傳感器組成,每個(gè)傳感器有3路輸出信號(hào),其中左傳感器信號(hào)分別供旋翼轉(zhuǎn)速信號(hào)處理器、左發(fā)動(dòng)機(jī)數(shù)字電子控制器、右發(fā)動(dòng)機(jī)數(shù)字電子控制器使用,右傳感器信號(hào)分別供旋翼轉(zhuǎn)速指示器、綜合數(shù)據(jù)管理計(jì)算機(jī)使用。
1.2 工作原理
圖1為旋翼轉(zhuǎn)速信號(hào)系統(tǒng)的工作原理框圖,旋翼轉(zhuǎn)速傳感器采取磁電式傳感器工作原理,配套音輪進(jìn)行工作,當(dāng)音輪轉(zhuǎn)動(dòng)時(shí),輪齒靠近或遠(yuǎn)離傳感器殼體內(nèi)的極靴,改變磁阻的大小,使極靴的磁通量呈周期性變化,從而使傳感器內(nèi)的線圈產(chǎn)生感應(yīng)電動(dòng)勢(shì),輸出正弦波電壓信號(hào),信號(hào)頻率與轉(zhuǎn)速變化成線性對(duì)應(yīng)關(guān)系。

圖1 旋翼轉(zhuǎn)速信號(hào)系統(tǒng)
旋翼轉(zhuǎn)速指示器采集旋翼轉(zhuǎn)速傳感器(左)的輸出電壓信號(hào),經(jīng)過(guò)輸入電路分壓、調(diào)理后,將近似正弦波信號(hào)處理成方波信號(hào)傳送給CPU處理電路,CPU處理電路對(duì)調(diào)理后的脈寬信號(hào)進(jìn)行運(yùn)算處理,輸出控制信號(hào)來(lái)控制步進(jìn)電機(jī)驅(qū)動(dòng)電路,驅(qū)動(dòng)步進(jìn)電機(jī)轉(zhuǎn)動(dòng),步進(jìn)電機(jī)旋轉(zhuǎn)帶動(dòng)指針軸及指針在刻度盤(pán)上指示出相應(yīng)的旋翼轉(zhuǎn)速。旋翼轉(zhuǎn)速信號(hào)處理器通過(guò)采樣電阻采集旋翼轉(zhuǎn)速傳感器(右)的輸出電壓信號(hào),經(jīng)過(guò)分壓、濾波和限幅等輸入電路調(diào)理后,將信號(hào)送至內(nèi)部處理單元,對(duì)信號(hào)的頻率進(jìn)行采集、分析、計(jì)算及D/A轉(zhuǎn)換等處理后,向機(jī)電管理系統(tǒng)輸出直流電壓信號(hào)以對(duì)應(yīng)顯示旋翼轉(zhuǎn)速,在檢測(cè)到旋翼轉(zhuǎn)速超限后,向告警系統(tǒng)輸出旋翼轉(zhuǎn)速高或旋翼轉(zhuǎn)速低接地信號(hào),并提供聲光告警。
旋翼轉(zhuǎn)速指示器在產(chǎn)品前端的輸入信號(hào)采集電路設(shè)計(jì)原理與旋翼轉(zhuǎn)速信號(hào)處理器類(lèi)似,都是通過(guò)分壓、采樣電阻等來(lái)實(shí)現(xiàn)對(duì)信號(hào)的處理及采集,下文選用旋翼轉(zhuǎn)速信號(hào)處理器來(lái)進(jìn)行詳細(xì)的阻抗匹配分析和設(shè)計(jì)改進(jìn)驗(yàn)證。
2 阻抗匹配分析
旋翼轉(zhuǎn)速傳感器作為信號(hào)源,其線圈內(nèi)阻與輸出線路電阻、旋翼轉(zhuǎn)速信號(hào)處理器采樣電阻在電路上構(gòu)成串聯(lián)回路,如圖2所示。理論上傳感器內(nèi)阻和線路電阻越小越好,其值越小,對(duì)信號(hào)造成的分壓則越小;而對(duì)于信號(hào)處理器來(lái)說(shuō),采樣電阻越大越好,其值越大,則取得的信號(hào)電壓越大。

圖2 傳感器與處理器接口示意圖
2.1 信號(hào)源阻抗
旋翼轉(zhuǎn)速傳感器的輸出信號(hào)為交流電壓信號(hào),在電路中影響交流電壓幅值的阻抗特性有阻性、感性、容性3種。其中,傳感器線圈是一種感性電阻,根據(jù)感抗計(jì)算公式XL=2 πfL(f為頻率,L為電感),其阻抗特性是頻率越高,感抗就越大,則分壓就越高。雖然傳感器線圈內(nèi)阻在靜態(tài)下的測(cè)試值為500~1000Ω,但當(dāng)轉(zhuǎn)速上升到100%,對(duì)應(yīng)的頻率為11019Hz時(shí),傳感器線圈阻抗在動(dòng)態(tài)下測(cè)試為18kΩ左右。
2.2 負(fù)載阻抗
旋翼轉(zhuǎn)速信號(hào)處理器的輸入阻抗在靜態(tài)下的測(cè)試值為12kΩ,對(duì)于信號(hào)采集電路而言,其輸入阻抗在設(shè)計(jì)時(shí)應(yīng)需遠(yuǎn)大于信號(hào)源輸出阻抗,結(jié)果表明,處理器的輸入阻抗明顯偏低,于是導(dǎo)致傳感器內(nèi)阻和線路電阻上的分壓過(guò)大,而處理器的輸入電壓則偏小。另外,由于處理器輸入電路上并接了濾波電容,而電容是一種容性電阻,根據(jù)容抗計(jì)算公式XC=1/(2 πfL) (f為頻率,C為電容),其阻抗特性是頻率越高,容抗就越小,從而導(dǎo)致處理器的輸入阻抗在動(dòng)態(tài)測(cè)試下會(huì)進(jìn)一步下降,使得處理器采樣電阻取得的信號(hào)電壓更小。
2.3 傳輸線阻抗
傳感器安裝于主減平臺(tái)之上,處理器安裝于客艙內(nèi),從傳感器到處理器的輸出線路總長(zhǎng)達(dá)十余米,由于線路較長(zhǎng),容易在導(dǎo)線上產(chǎn)生寄生電感,從而導(dǎo)致動(dòng)態(tài)下的線路阻抗更大,線路上分壓更多。
綜合分析上述因素發(fā)現(xiàn),由于傳感器輸出的是高頻信號(hào),其電壓幅值受負(fù)載阻抗影響較大,并且旋翼轉(zhuǎn)速越快,負(fù)載采集端的電壓幅值下降就越嚴(yán)重。例如,旋翼轉(zhuǎn)速信號(hào)處理器的輸入電路設(shè)計(jì)與旋翼轉(zhuǎn)速磁傳感器的輸出電路匹配不合理時(shí),會(huì)導(dǎo)致信號(hào)電壓幅值大幅下降,低于產(chǎn)品正常工作的設(shè)計(jì)邊界值,從而造成旋翼轉(zhuǎn)速信號(hào)失真。
3 改進(jìn)及驗(yàn)證
3.1 設(shè)計(jì)改進(jìn)
針對(duì)旋翼轉(zhuǎn)速信號(hào)處理器的輸入電路設(shè)計(jì)與旋翼轉(zhuǎn)速傳感器的輸出電路匹配不合理的問(wèn)題,對(duì)處理器輸入電路進(jìn)行設(shè)計(jì)改進(jìn)。原處理器輸入電路圖如圖3所示,改進(jìn)后的處理器輸入電路圖如圖4所示。
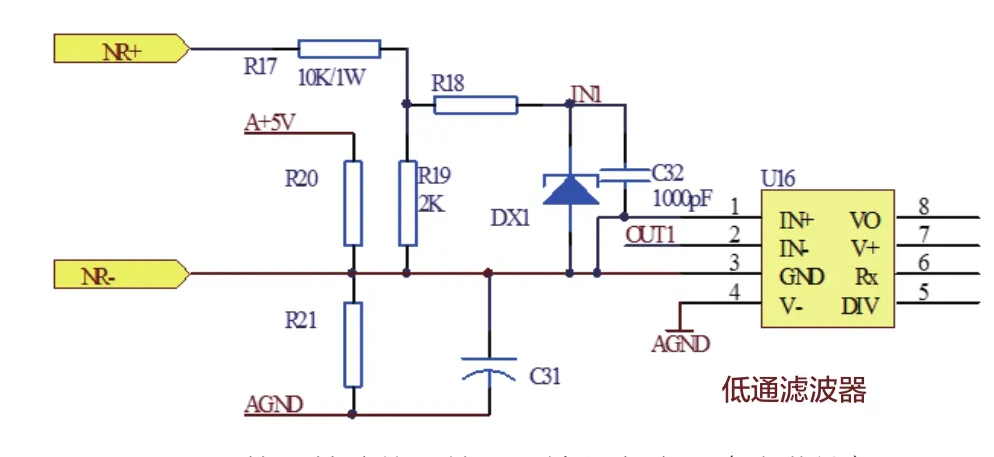
圖3 旋翼轉(zhuǎn)速信號(hào)處理器輸入電路圖(改進(jìn)前)

圖4 旋翼轉(zhuǎn)速信號(hào)處理器輸入電路圖(改進(jìn)后)
改進(jìn)后的處理器輸入電路由阻抗匹配電路、限幅電路、差分隔離電路等組成,與改進(jìn)前的狀態(tài)相比,主要是增大了輸入阻抗。為了不降低原先設(shè)計(jì)的抗噪聲干擾能力,增加了差分放大器對(duì)輸入信號(hào)進(jìn)行隔離處理,將濾波電容移至差分放大器后級(jí),保證了產(chǎn)品的輸入電路無(wú)容性阻抗,提高了輸入電壓,改進(jìn)后的產(chǎn)品在100%轉(zhuǎn)速下的動(dòng)態(tài)阻抗為440kΩ。
旋翼轉(zhuǎn)速采集設(shè)備采集傳感器的輸出信號(hào),通過(guò)分析信號(hào)的頻率變化得到旋翼轉(zhuǎn)速的變化,信號(hào)電壓幅值的波動(dòng)并不會(huì)改變?cè)O(shè)備對(duì)信號(hào)頻率的處理分析功能,但如果設(shè)備采集端的信號(hào)電壓過(guò)小,則可能導(dǎo)致設(shè)備采集不到有效信號(hào)或采集到低幅值的干擾噪聲信號(hào),致使設(shè)備產(chǎn)生錯(cuò)誤的處理分析結(jié)果,因此,改變?cè)O(shè)備的輸入阻抗不會(huì)影響設(shè)備原本的既定功能,只是關(guān)系到其取得信號(hào)的強(qiáng)弱(即分壓的大小)。
3.2 試驗(yàn)驗(yàn)證
為了驗(yàn)證旋翼轉(zhuǎn)速信號(hào)處理器設(shè)計(jì)改進(jìn)的準(zhǔn)確性,對(duì)旋翼轉(zhuǎn)速信號(hào)處理器進(jìn)行測(cè)試,按直升機(jī)實(shí)際的接線關(guān)系搭建地面運(yùn)轉(zhuǎn)臺(tái)模擬試驗(yàn)?zāi)P停瑴y(cè)試電纜的長(zhǎng)度、規(guī)格與機(jī)上電纜相同,根據(jù)電調(diào)輸入采集電路搭建了兩路模擬電調(diào)負(fù)載。用示波器對(duì)旋翼轉(zhuǎn)速信號(hào)處理器插頭處的輸入信號(hào)進(jìn)行監(jiān)測(cè),改進(jìn)前后的處理器在運(yùn)轉(zhuǎn)臺(tái)的試驗(yàn)結(jié)果見(jiàn)表1。

表1 旋翼轉(zhuǎn)速信號(hào)處理器地面運(yùn)轉(zhuǎn)臺(tái)模擬試驗(yàn)
旋翼轉(zhuǎn)速信號(hào)處理器經(jīng)過(guò)地面運(yùn)轉(zhuǎn)臺(tái)模擬試驗(yàn)驗(yàn)證后,在直升機(jī)上進(jìn)行裝機(jī)試飛,試飛結(jié)果見(jiàn)表2。改進(jìn)后的旋翼轉(zhuǎn)速信號(hào)處理器的輸入信號(hào)電壓幅值有效提高,能夠滿足旋翼轉(zhuǎn)速信號(hào)處理器正常工作的最低電壓設(shè)計(jì)要求(1.5Vp-p),旋翼轉(zhuǎn)速信號(hào)系統(tǒng)指示正常。

表2 旋翼轉(zhuǎn)速信號(hào)處理器裝機(jī)試飛試驗(yàn)
4 結(jié)束語(yǔ)
通過(guò)提高旋翼轉(zhuǎn)速信號(hào)處理器的負(fù)載阻抗,有效解決了系統(tǒng)的阻抗匹配性問(wèn)題。結(jié)果表明,該改進(jìn)后的系統(tǒng)經(jīng)過(guò)地面試驗(yàn)及裝機(jī)試飛驗(yàn)證,改進(jìn)方案簡(jiǎn)單有效,旋翼轉(zhuǎn)速信號(hào)穩(wěn)定,系統(tǒng)可靠性提高。結(jié)果表明,該改進(jìn)方法已實(shí)際應(yīng)用在機(jī)上使用旋翼轉(zhuǎn)速傳感器輸出信號(hào)的其他采集設(shè)備上,可以作為對(duì)使用高頻輸出信號(hào)的負(fù)載設(shè)備開(kāi)展阻抗匹配性分析的理論指導(dǎo)依據(jù)和處理方法。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國(guó)病理生理雜志(2015年8期)2015-12-21 12:38:06
