消防輔助救援機器人群設計研究
2019-10-08 08:08:58陳偉哲黃夢醒吳迪肖瑾丁一寅張晨宇
軟件工程 2019年9期
陳偉哲 黃夢醒 吳迪 肖瑾 丁一寅 張晨宇

摘 ?要:高科技機器人已開始代替人類在一些特殊場合的工作,“機器換人”已然成為現有科技發展的主流趨勢。本文針對消防輔助救援機器人群開展研究。在分析消防輔助救援機器人應用現狀的基礎上,設計了由一臺領航機器人和兩臺跟隨機器人組成的消防輔助救援機器人群,并分別討論了每臺機器人的工作原理和實現方法,最后給出了可實現的功能和下一步的研究工作,為消防機器人完成團隊化工作提供了一個新的方向。
關鍵詞:消防;輔助救援機器人群;領航機器人;工程機器人;信息檢測機器人
中圖分類號:TP242.6 ? ? 文獻標識碼:A
Abstract:High-tech robots have begun to take the place of human beings in some special occasions,and Machine Replacement has become the mainstream trend of the current development of science and technology.In this paper,fire rescue robots are studied.Based on the analysis of the application status of fire rescue robots,a group of fire rescue robots consisting of a pilot robot and two random robots are designed.The working principle and implementation method of each robot are discussed separately.Finally,the realizable functions and the following research work are given to the fire rescue robots,providing a new direction to accomplish team work.
Keywords:fire-fighting;assistant rescue robot group;pilot robot;engineering robot;information detection robot
1 ? 引言(Introduction)
據應急管理部消防救援局的統計,2018年全國共接報火災23.7萬起,死亡1407人,傷798人,消防隊每天平均出隊救火就達到650次,任務繁重且危險性高。因火災現場各種不確定性因素可能導致消防人員做出錯誤決斷,當我們聽到消防員因為救人而不幸犧牲的時候,無不為他們感到心痛。因此消防輔助型機器人[1]的設計與應用[2]顯得尤為重要,而一個完整的救援系統需要擁有自主巡航和手動操控兩種控制模式,具有自主建圖導航[3,4]、危險物品自動抓取[5]、周圍環境實時圖傳、環境監測等功能。本文提出了消防輔助救援機器人群的設計研究方案。
2 ?消防輔助救援機器人的應用現狀(Application status of the fire-fighting assistant rescue robot)
相比于國內救援輔助消防機器人仍處于起步階段的情況,國外救援輔助機器人已經慢慢走向成熟化。例如日本科學家們已經研發出了可以在復雜地形運動的小型機器人,可以在地震災后在廢墟中尋找生命。希臘科學家則針對情況復雜的水上救援設計出了海上救援機器人。國外救援機器人已經開始在各個領域發揮重要作用。而國內現狀主要是受兩個方面因素[6]影響,第一是因為國內當前的特種救援機器人主要是服務于政府和軍隊,它們的主要技能都是為危險性特大的災難而設計的;另一方面是由于消防機器人仍處于試用實驗階段,國家在消防機器人上的資金投入上存在不足,還不能投入到大規模的生產中,使得大部分地區無法使用。
消防輔助救援機器人在滅火救援[7]中具有廣闊發展空間:一是消防機器人的輔助系統可以在火災現場情況不明時,利用自身的傳感器進行輔助,對周圍的復雜地形進行掃描構圖,能夠輔助消防員進入火場,并利用其自帶的紅外成像系統,讓消防員能夠在最短時間內找到被困人員。二是在消防救援活動中,在面對消防人員無法工作的高溫危險區域,可以進行近距離的滅火作戰,這極大程度上提高了其在滅火救援中的戰斗力。三是隨著我國經濟社會的發展,社會生產生活活動越來越特殊化,消防火災出現的原因越發復雜,影響范圍廣。經常會出現消防火災事故,在許多情況下事故對于消防人員的生命危險較大,而消防輔助機器人則能在保障消防人員的安全下,以最快速度營救被困人員,并控制現場火災。
3 ?消防輔助救援機器人群的設計原理(Design principle of the fire-fighting assistant rescue robot group)
消防輔助救援機器人群是由一臺領航機器人和兩臺跟隨機器人組成的多智能體編隊,如圖1所示,整個系統有自主巡航和手動操控兩種控制模式,具有自主建圖導航、危險物品自動抓取、周圍環境實時圖傳、環境監測等功能。
3.1 ? 領航機器人
領航機器人外形圖和內部結構圖分別如圖2和圖3所示。領航機器人搭載激光雷達對周圍環境進行掃描、建模,并規劃出機器人群經過的優化路徑。雙電機驅動機器人沿著路徑行駛,通過對電機的通斷電和機器人內部的差速裝置實現機器人的啟停和轉彎。用戶可設置地圖中的起點和終點,領航機器人會帶領編隊達到所指定的目的地。控制方式有兩種,一種通過ROS環境電腦與樹莓派進行局域網互聯,一種是手機app與樹莓派進行連接,控制機器人進行雷達的掃描建圖及導航。除此外,還加入了USB攝像頭模塊,供遠距離操控時的實時圖傳。
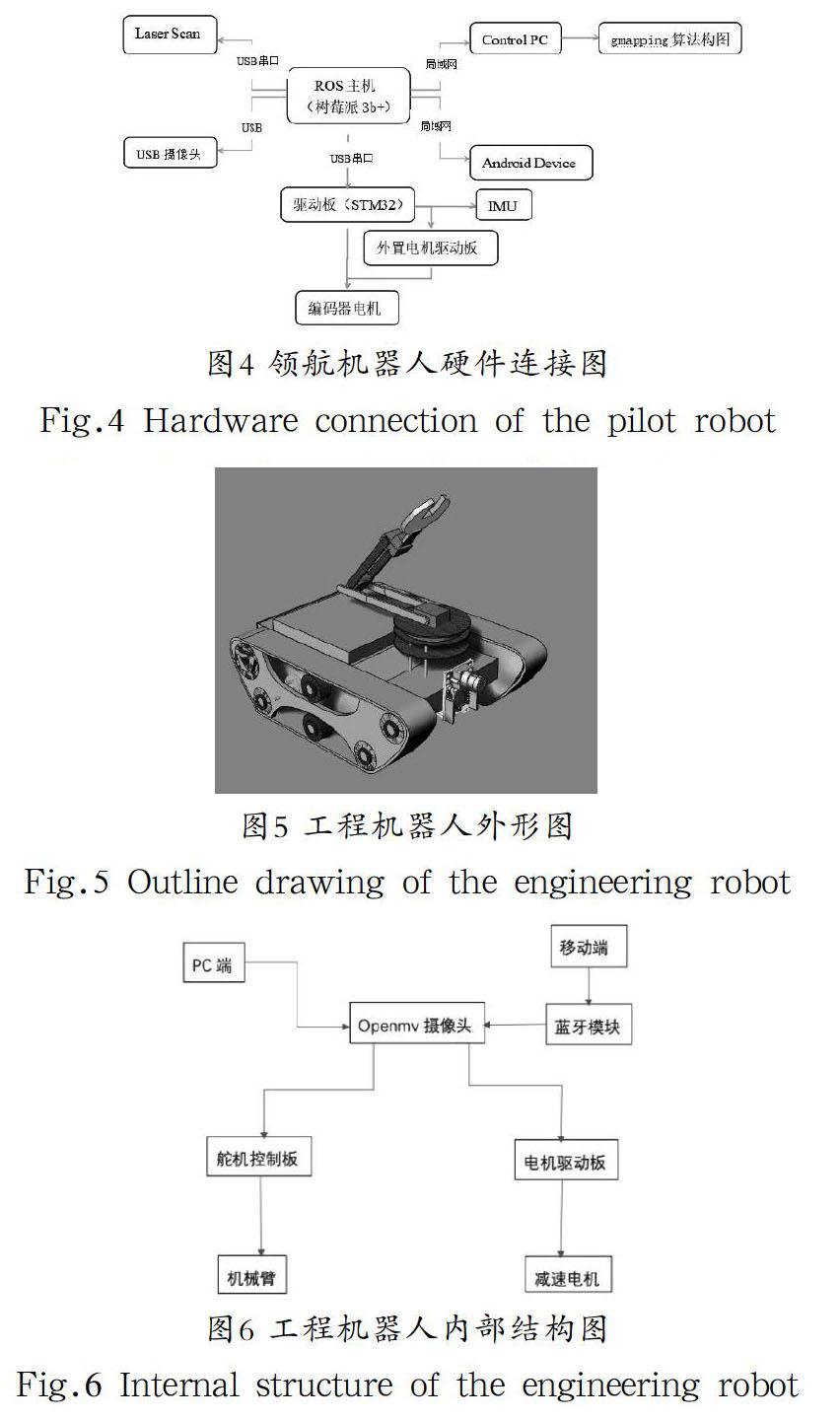
領航機器人的核心開發版采用樹莓派3b+,配置環境為Linux系統ROS環境,底層驅動板為stm32F1開發板。用戶可以通過ROS電腦與樹莓派進行局域網互通,發送指令打開激光雷達,將激光雷達返回的點云數據進行tf樹坐標系轉換后,采用gmapping算法最終在PC端建立一個平面二維地圖供操控者查看。建立好二維平面圖進行保存后,可設置地圖中的起點和終點,通過路徑規劃算法進行規劃行駛路徑,并且無須人員操作實時更新路徑自行前往目的地,領航機器人的硬件連接如圖4所示。
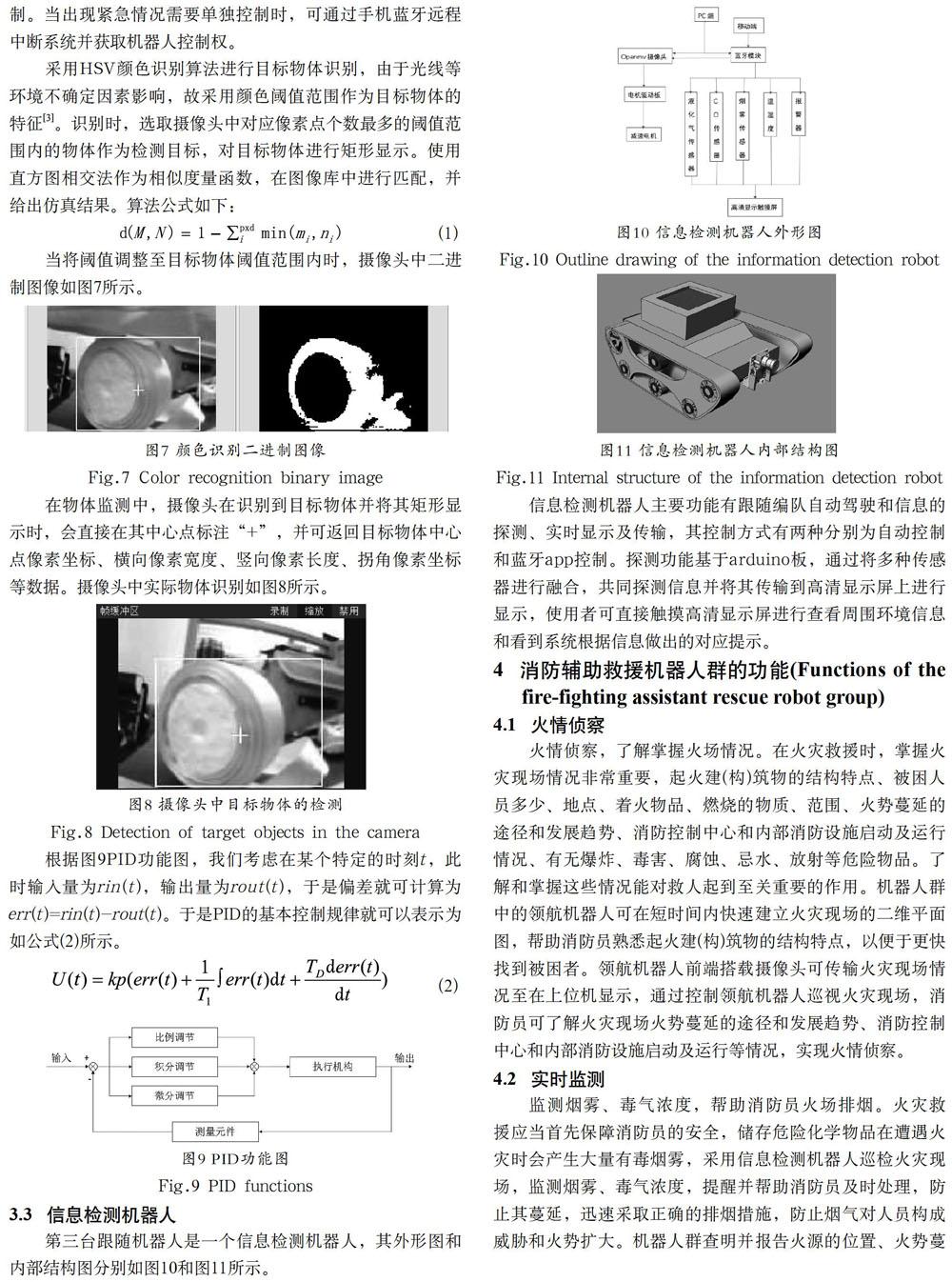
3.2 ? 工程機器人
第二臺跟隨機器人是一個工程機器人,其外形圖和內部結構圖分別如圖4和圖5所示。工程機器人的主要作用是主動識別自動抓取危險物品和跟隨第一臺領航機器人,其控制方式有兩種分別為自動控制和藍牙app控制。機器視覺基于openmv平臺,可主動識別事先設定好的危險物品,通過機械臂逆運動學幾何解法解算出各機器手關節舵機所需的轉角,并將其輸出至舵機控制板進行控制機械臂自主抓取。
跟隨領航機器人自動控制實現途徑為顏色識別算法。通過在領航機器人的末尾添加一條特殊彩帶,并采用顏色識別算法找出領航機器人尾部中心點,將此攝像頭與領航機器人之間的角度偏差值和距離插值輸入到底層的pid控制輸入端,經過公式轉換成左右輪的速度值進行工程機器人的自動控制。當出現緊急情況需要單獨控制時,可通過手機藍牙遠程中斷系統并獲取機器人控制權。
在物體監測中,攝像頭在識別到目標物體并將其矩形顯示時,會直接在其中心點標注“+”,并可返回目標物體中心點像素坐標、橫向像素寬度、豎向像素長度、拐角像素坐標等數據。攝像頭中實際物體識別如圖8所示。
信息檢測機器人主要功能有跟隨編隊自動駕駛和信息的探測、實時顯示及傳輸,其控制方式有兩種分別為自動控制和藍牙app控制。探測功能基于arduino板,通過將多種傳感器進行融合,共同探測信息并將其傳輸到高清顯示屏上進行顯示,使用者可直接觸摸高清顯示屏進行查看周圍環境信息和看到系統根據信息做出的對應提示。
4 ?消防輔助救援機器人群的功能(Functions of the fire-fighting assistant rescue robot group)
4.1 ? 火情偵察
火情偵察,了解掌握火場情況。在火災救援時,掌握火災現場情況非常重要,起火建(構)筑物的結構特點、被困人員多少、地點、著火物品、燃燒的物質、范圍、火勢蔓延的途徑和發展趨勢、消防控制中心和內部消防設施啟動及運行情況、有無爆炸、毒害、腐蝕、忌水、放射等危險物品。了解和掌握這些情況能對救人起到至關重要的作用。機器人群中的領航機器人可在短時間內快速建立火災現場的二維平面圖,幫助消防員熟悉起火建(構)筑物的結構特點,以便于更快找到被困者。領航機器人前端搭載攝像頭可傳輸火災現場情況至在上位機顯示,通過控制領航機器人巡視火災現場,消防員可了解火災現場火勢蔓延的途徑和發展趨勢、消防控制中心和內部消防設施啟動及運行等情況,實現火情偵察。
4.2 ? 實時監測
監測煙霧、毒氣濃度,幫助消防員火場排煙。火災救援應當首先保障消防員的安全,儲存危險化學物品在遭遇火災時會產生大量有毒煙霧,采用信息檢測機器人巡檢火災現場,監測煙霧、毒氣濃度,提醒并幫助消防員及時處理,防止其蔓延,迅速采取正確的排煙措施,防止煙氣對人員構成威脅和火勢擴大。機器人群查明并報告火源的位置、火勢蔓
延的方向、煙霧擴散的范圍后,工程機器人用機械臂夾取小型滅火球幫助消防員撲滅火源,消防員則利用破拆、噴霧水流、移動排煙設備等方法進行人工排煙。
4.3 ? 清理工作
火災撲滅后的清理工作,防止二次爆炸或燃燒。火災撲滅后利用消防救援機器人群全面、細致地檢查火場,徹底消滅余火;對石油化工生產裝置、儲存設備的溫度及其周圍可燃氣體、易燃可燃液體蒸汽的濃度進行檢測,并進行相應的處理,防止復燃。
5 ? 結論(Conclusion)
消防輔助救援機器人群是由一臺領航機器人和兩臺跟隨機器人組成的多智能體編隊。本產品的主要功能有火災緊急輔助救援、動態監視、災情探測、異常報警、危險品抓取、緊急物資遞送等,可提高救援效率、保障消防員安全,為緊急情況救援、環境探測、災后巡檢等任務提供解決方案。這個設計未來有三個主要發展方向:一是將三輛車進行放大化,往人形機器人方向發展;二是提高系統語音識別的智能程度,向智能交互發展;三是利用基站定位或者雷達定位對陣型的變換進行加強。最終目的是希望它能升級應用到更大型的工業活動中去。
參考文獻(References)
[1] Ando H,Ambe Y,Ishii A,et al.Aerial Hose Type Robot by Water Jet for Fire Fighting[J].IEEE Robotics & Automation Letters,2018,3(2):1128-1135.
[2] Shamsudin A U,Ohno K,Hamada R,et al.Consistent map building in petrochemical complexes for firefighter robots using SLAM based on GPS and LIDAR[J].Robomech Journal,2018,5(1):7.
[3] Lu Y,Zhang L,Weijer J V D,et al.Beyond Eleven Color Names for Image Understanding[J].Machine Vision & Applications,? ? ? 2018,29(2):361-373.
[4] 陶霖密,徐光祐.機器視覺中的顏色問題及應用[J].科學通報,2001,46(3):178-190.
[5] 郭豪,李寶慧,趙樹忠.基于模糊PID控制的步進電機建模與仿真[J].機械工程與自動化,2018,48(2):167-168.
[6] 陳建斌.消防機器人在我國滅火救援中的應用現狀和前景分析[J].地球,2017(10):98.
[7] 鄭鵬.基于消防機器人的救援輔助系統的研究[J].山東工業技術,2014(10):57-58.
作者簡介:
陳偉哲(1998-),男,本科生.研究領域:智能機器人.
黃夢醒(1973-),男,博士,教授.研究領域:人工智能大數據海洋通信.本文通訊作者.
吳 ?迪(1991-),男,碩士.研究領域:人工智能大數據海洋通信.
肖 ? 瑾(1998-),女,本科生.研究領域:智能機器人.
丁一寅(1998-),男,本科生.研究領域:智能機器人.
張晨宇(1998-),男,本科生.研究領域:智能機器人.