植物病原菌孢子智能捕捉系統設計與實現
2019-10-09 00:45:18趙遠超胡憲亮王圣楠孫洪濤李曉慧趙建平
自動化儀表 2019年9期
關鍵詞:系統
趙遠超,胡憲亮,王圣楠,孫洪濤,李曉慧,趙建平
(1.曲阜師范大學物理工程學院,山東 曲阜 273165;2.濟南祥辰科技有限公司,山東 濟南 251400)
0 引言
氣傳病害是植物病害中的一類重要病害。植物病原主要通過氣流進行傳播,從而完成侵染[1]。孢子是真菌主要的繁殖方式。孢子產生數量很大,且體積小、質量輕,很容易通過氣流傳播[2]。因此,農作物田間空氣中病原菌孢子的數量和農作物病害發生有著密切的關系。對田間空氣中病原菌孢子進行及時準確地捕捉和計數,可為農作物病害的診斷提供基礎數據,對降低農作物病害發生而造成的損失具有重要意義[3]。
目前,對于空氣中病原菌孢子的捕捉和計數,多采用孢子捕捉器進行取樣和監測,待捕捉結束后將黏附有病原菌孢子的載玻片帶回實驗室進行顯微觀測和統計[4]。這種方式需要人工收集載玻片在顯微鏡下觀測統計,存在智能化程度低、費時費力的缺點[5]。針對傳統孢子捕捉器存在的弊端,本文結合計算機技術、傳感器技術和無線通信技術,基于高倍顯微鏡、電荷耦合器件(charge coupled device,CCD)數字攝像頭、嵌入式工控機和云服務器等,提出了一種以脈沖信號作為控制信號,具有高放大倍數、高分辨率的智能植物病原菌孢子捕捉系統。該系統能夠自動捕捉病原菌孢子、遠程實時、定時將病原菌孢子的數量及形態圖像上傳至云服務器,為病害監測預警和防控工作提供了重要科學依據。
1 系統功能需求分析和總體設計
根據植物病原菌孢子的傳播原理、傳統孢子捕捉器存在的缺點,病原菌孢子智能捕捉系統需要滿足以下功能需求。
①病情圖像自動采集功能:系統能夠實現從載玻片加載、病原菌孢子捕捉、顯微成像、已使用載玻片回收過程全自動化運行。
②孢子形態圖像上傳及控制命令下發:通過無線網絡將采集的病原菌孢子數目、形態圖像上傳至云服務器;同時,用戶可根據需求設置顯微鏡放大倍數和氣流采集的時間、時長。
③病原菌孢子實時監測面板:系統對圖像數據與病害孢子及病害發生指數數據庫進行自動比對,得出農作物病害情況并發出預警;用戶可以查看圖像數據。
根據上述功能需求,本文將系統分為感知層、網絡層和應用層[6]。系統架構如圖1所示。
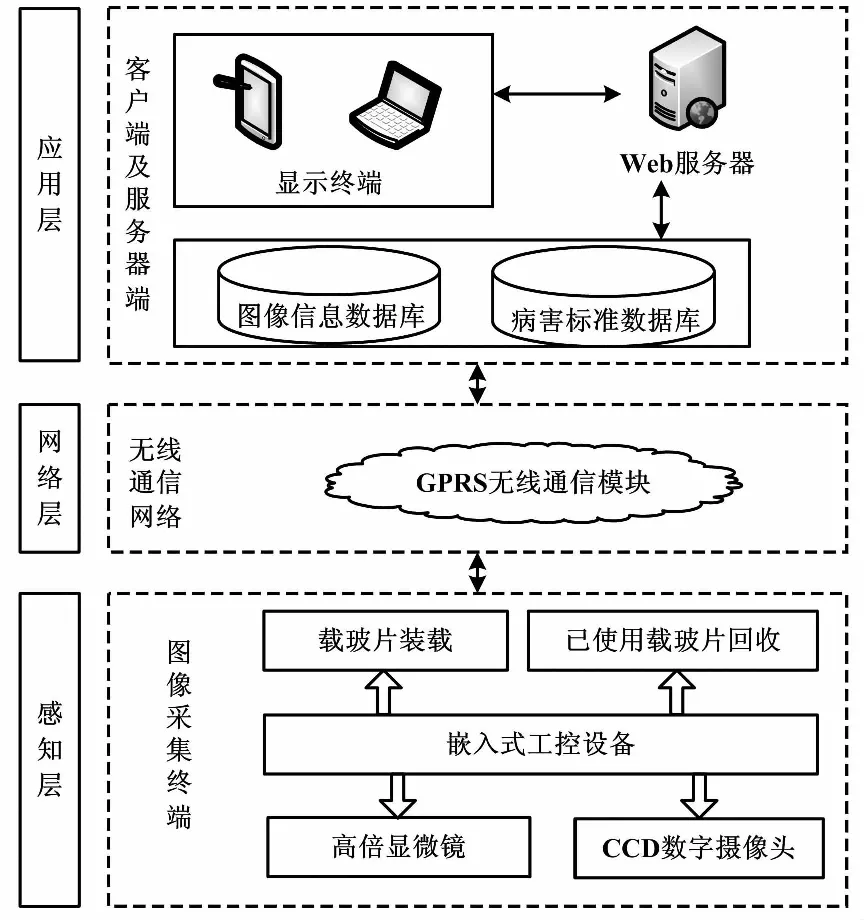
圖1 系統架構圖
2 系統硬件設計
為了實現對田間農作物病原菌孢子捕捉的智能化,本文設計的孢子智能捕捉系統主要包括控制器模塊、病原菌孢子捕捉模塊、顯微圖像采集模塊以及無線通信模塊等四部分。系統硬件設計如圖2所示。
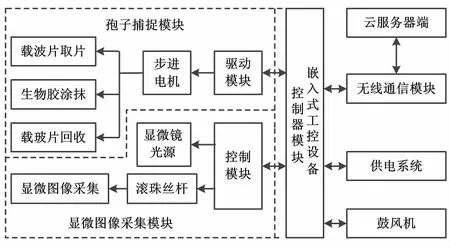
圖2 系統硬件設計圖
2.1 控制器模塊
控制器模塊是整個系統的控制核心,主要完成各模塊的控制工作[7]。由于系統需要對步進電機、鼓風風機、無線通信模塊、高倍顯微鏡和CCD數字攝像頭等模塊進行精確控制,所以要求控制器模塊具有強大的運算能力和豐富的外設接口。因此,本系統采用青島棟林科技有限公司生產的XC-2150F型嵌入式工控機。該工控機內核基于Intel Corei7處理器,運行內存容量最大支持8 GB,具有5個通用串行總線(universal serial bus,USB)接口和4個串行通信(cluster communication port,COM)端口,能夠滿足步進電機、無線通信模塊和高倍顯微鏡和CCD攝像頭等設備同時接入,保證了孢子圖像數據的采集與處理速度。
2.2 病原菌孢子捕捉模塊
病原菌孢子捕捉模塊的主要功能為:在電機驅動模塊、步進電機與鼓風風機三部分的共同作用下,進行載玻片自動裝載、生物膠涂抹、孢子吸附和廢棄載玻片的回收等操作任務,實現田間病害孢子的自動捕捉。
由于本系統對于運動控制的精度要求比較高,因此電機選用高精度的兩相四線步進電機作為運動控制部件。步進電機的驅動控制模塊作為本系統研究的關鍵技術之一,是由UIM2501控制協議轉換器連接UIM242控制驅動器實現的。UIM2501搭配UIM242控制驅動器實現了控制器局域網總線(controller area network,CAN)協議與RS-232協議的轉換,從而避免CAN協議帶來的一系列復雜問題。嵌入式工控機可利用一個UM2501控制協議轉換器連接多個UIM242控制驅動器驅動多個步進電機,為實現多電機驅動提供了便利。
2.3 顯微圖像采集模塊
顯微圖像采集模塊主要由高倍顯微鏡、CCD數字攝像頭、顯微鏡光源補償和滾珠絲桿組成。在嵌入式工控機的控制下,步進電機帶動滾珠絲桿對顯微鏡焦距進行超高精度調節。光源是CCD攝像頭對物體清晰拍照的重要因素。在對物體進行成像時,CCD攝像頭上光敏元件感受到外界光線變化,產生電流信號作用于工控機。工控機根據電流信號大小生成脈沖寬度調制(pulse width modulation,PWM)信號,調節發光二極管(light emitting diode,LED)的強弱變化,以滿足在不同環境光下對CCD相機拍攝所需最佳亮度需求[7-8]。本系統采用奧林巴斯BX51型高倍顯微鏡作為田間病原菌孢子圖像拍攝,選用低功耗大功率燈珠為顯微圖像采集提供光源補償。
2.4 無線通信模塊
無線通信模塊的主要功能是將圖像數據經無線網絡上傳至云服務器端,同時將用戶下發的控制指令轉發至嵌入式工控機,是應用層與感知層進行數據交換的“橋梁”[9]。考慮到系統低功耗、易擴展等實際需求,故選用山東楠林信息技術公司推出的XC-GPRS無線數據傳輸模塊。該模塊利用運營商通用分組無線服務技術(general packet radio service,GPRS)為用戶提供無線長距離數據傳輸功能,具有RS-232和RS-485接口,支持AT指令,上傳速率最大支持60 KB/s,實現了服務器端對顯微圖像采集系統的遠程控制和圖像數據的遠程傳輸。
3 系統軟件設計
針對病原菌孢子智能捕捉系統控制需求,基于系統的硬件模塊的研究基礎,設計了具有人機交互能力的軟件系統[10]。系統軟件主要包含三部分內容:①病原菌孢子采集;②顯微圖像處理;③監測平臺應用程序設計。
3.1 病原菌孢子采集
為實現載玻片的自動裝載、生物膠涂抹、空氣中孢子捕捉、顯微圖像處理和廢棄載玻片回收等任務操作,以嵌入式Windows 7為操作系統、Microsoft Visual Studio2010為開發平臺,設計了以嵌入式工控機為核心的病原菌孢子采集軟件系統。孢子采集與顯微圖像處理流程如圖3所示。
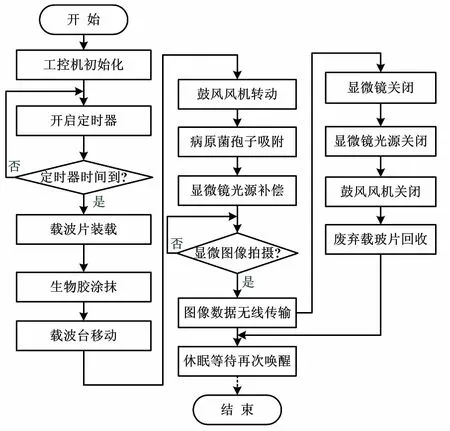
圖3 孢子采集與顯微圖像處理流程圖
3.2 顯微圖像處理
病原菌孢子數目、形態等特征的提取是實現與病害發生指數數據庫進行自動比對的基礎。系統采用圖像特征提取軟件OpenCV對孢子數目、形態進行提取,數據庫SQLServer 2008實現孢子特征數據庫與病害發生指數數據庫的構建。
為篩選清晰顯微圖像,首先運用OpenCV對原圖像進行灰度化、邊緣濾波處理;然后通過對圖像的每一行隔一個像素取一個灰度值,得到新的灰度矩陣V(i,j);再根據式(1)計算相鄰灰度方差,從而得到清晰圖像;最終通過邊緣檢測方法提取到孢子的數目和形態。

I(x+1,y)]
(1)
式中:I(x,y)為(x,y)位置對應的灰度值;n為圖像的像素點個數。
3.3 監測平臺應用程序設計
為簡化客戶端電腦載荷,減輕系統維護與升級的成本和工作量,監測平臺應用程序采用瀏覽器/服務器(browser/server,B/S)結構。為了滿足用戶對田間農作物生長狀況的實時監測,使用Java服務器頁面(javaserver pages,JSP)技術開發Web端,搭建配置Tomcat服務器,采用層疊樣式表(cascading style sheets,CSS)和JavaScript等相關技術對網站頁面進行排版,以求達到視覺上的美觀。監測平臺應用程序包括登錄孢子圖像遠程監控子系統、病情預警發布子系統、氣象數據監測子系統3個子系統。用戶在安裝OXC.EXE插件下的IE11瀏覽器上輸入網址,即可進入登錄界面。
4 系統實現與測試
根據上述研究思路,設計了病原菌孢子智能捕捉系統。為了驗證系統的性能,于2017年6月與2017年11月期間,將病原菌孢子智能捕捉系統和傳統孢子捕捉器同時放置在濟寧市汶上縣次丘農場小麥田內進行測試。運行結果如表1所示。

表1 運行結果
由表1可以看出,與傳統孢子捕捉器相比,病原菌孢子捕捉系統不僅具有自動采集、自動計數、自動上傳數據的優點,而且在采集孢子圖像、孢子檢測精度等方面體現出更加優異的性能,為農、林業病蟲害的防治提供了可靠保障。本系統同時配備了空氣溫濕度、土壤溫濕度、風速風向等氣象因子的實時監測,以便進行病害發生與氣象數據的關聯性分析。
5 結束語
針對當前孢子捕捉器普遍存在工作效率低、孢子識別率差、費時費力等缺點,設計了一種以脈沖信號為控制信號,具有高放大倍數、高分辨率的智能農作物病原菌孢子捕捉系統。田間測試表明,系統可長時間穩定工作,能夠實現從載玻片加載、病原菌孢子捕捉、顯微成像、圖像數據上傳和廢舊載玻片回收等操作的全自動化,為病害監測預警和防控工作提供了重要科學依據,對降低農作物病害發生而造成的損失具有重要意義。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
