新三電平虛擬空間矢量的調制算法研究
2019-10-09 00:45:18黃煥強遲屹楠黃照賀吳釗銘尹龍強
自動化儀表 2019年9期
黃煥強,遲屹楠,吳 藝,黃照賀,裴 璐,吳釗銘,尹龍強
(1.深圳供電局有限公司,廣東 深圳 518000;2.深圳市泰昂能源科技股份有限公司,廣東 深圳 518133)
0 引言
傳統空間矢量算法是通過三電平三維空間矢量在二維平面上的投影實現的。針對三電平的矢量算法,最早由國外專家提出了多種實現方式[1-3]。虛擬矢量算法是由空間矢量算法發展而來的、較為新穎的算法。文獻[4-6]提出采用虛擬矢量的方法實現三電平空間矢量調制和控制。另外,對比虛擬矢量和傳統空間矢量技術。虛擬矢量在母線中點控制技術[7-9]實現方面比較復雜,但是其對諧波和共模分量的抑制較好,應用具備廣泛性,因此獲得業界青睞。以日本安川電機等為代表的日本廠家,目前主推的就是虛擬矢量的電機控制技術。
簡言之,虛擬空間矢量脈寬度調制(virtual space vector paulse width modulation,VSVPWM)方法是通過將傳統三電平空間矢量脈寬調制轉化為虛擬矢量脈寬調制,實現對中線電流為零的控制,從而消除中點電位的低頻波動。但是這個方法本質上屬于開環控制,無法針對母線中的點電位偏移實現閉環調節,在電網跳變和不平衡跌落等工況下逆變器會產生母線中點電位偏移。針對上述問題,很多學者提出了一系列閉環方法[10-12],但基本上處理方法更加復雜,且中點電位偏移改善的效果并不理想。因此,需要跳出固有的思維,研究一種新的改進方法,如用閉環控制方式抑制母線中點電位偏移。
1 三電平拓撲模型
典型的三電平拓撲模型如圖1所示。

圖1 三電平拓撲模型
該拓撲采用高效率的T型三電平拓撲,共12個電力電子開關管:Sa1~Sa4、Sb1~Sb4、 Sc1~Sc4。這種拓撲的難點在于需要保證正負母線平衡,也就是電容C1和C2電壓一致,否則容易出現開關管過壓等情況。另外,虛擬空間矢量、三維空間矢量和傳統空間矢量等算法均可應用在此拓撲模型上。
2 算法實現
2.1 空間矢量傳統算法概述
空間矢量算法一般都遵循最近小矢量合成原則:
(1)
式中:矢量V為給定矢量;V1、V2、V3為臨近V的3個空間矢量,可以合成并代替V;Ts為矢量V的作用時間;T1、T2、T3分別為空間矢量V1、V2、V3的作用時間。
對于三電平拓撲,開關閉合用1表示,斷開用0表示。用i表示A 相、B 相和C 相中的任意一相,Si1-Si4代表任意一相開關管的狀態。當{Si1,Si2,Si3,Si4}= {1,1,0,0}時,用狀態P表示;當{Si1,Si2,Si3,Si4} ={0,0,1,1} 時,用狀態N表示;當{Si1,Si2,Si3,Si4}={0,1,1,0} 時,用狀態O表示。根據圖1,得到27個基本矢量。其中:零矢量3 個,小矢量12 個,中矢量6個,大矢量6 個。
傳統三電平空間矢量圖如圖2所示。空間矢量圖分為6個等邊三角形大扇區SECTORⅠ、SECTORⅡ、SECTORⅢ、SECTORⅣ、SECTORⅤ、SECTORⅥ。每個大扇區又分為4個小三角形扇區。為了細化調制得,可以在4個小三角形扇區基礎上再細分為6個小三角形扇區,這里不再贅述。
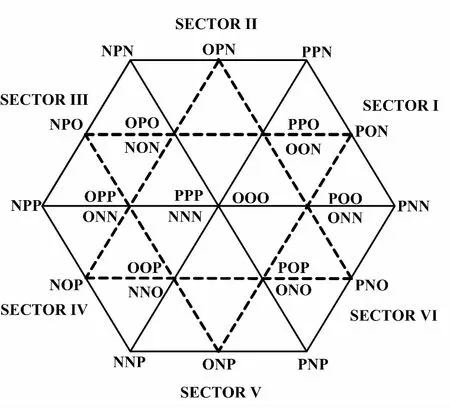
圖2 傳統三電平空間矢量圖
2.2 虛擬矢量傳統算法概述
通過沿用上面基本矢量的傳統獲取方法,將基本矢量中的部分矢量合成形成虛擬矢量,以第1扇區SECTORⅠ為例,將基本空間矢量PWM 轉化為虛擬矢量,通過式(2)完成。
(2)
式中:VVS1、VVS2為虛擬小矢量;VVL1、VVL2為虛擬大矢量;VVM1為虛擬中矢量;VPOO、VONN、VPPO、VOON為基本小矢量;VPON為基本中矢量;VPPN、VPNN為基本大矢量。
虛擬大矢量就是基本大矢量,虛擬中矢量和虛擬小矢量需要用基本中矢量和基本小矢量合成。
以基本中矢量VPON為例,因其對應的中點電流ib通常不為零,隨時間變化,會對中點電壓造成不可控影響。在一個采樣周期內,在原本的基本中矢量上加入相鄰的兩個基本小矢量VOON、VPPO(對應中點電流分別為ia和ic),令三者作用時間相同,以虛擬矢量代替原來的基本中矢量,可消除中矢量對中點電壓的影響。采用虛擬中矢量代替原來的基本中矢量后,一個扇區被分成了5個小區域。第1扇區的虛擬空間矢量劃分如圖3所示。

圖3 第1扇區的虛擬空間矢量劃分圖
2.3 中點平衡存在問題
實際應用中,會遇到大量調制比m接近1的工況。m接近1的給定矢量旋轉過第1扇區示意圖如圖4所示。

圖4 m接近1的給定矢量旋轉過第1扇區示意圖
當調制比m接近1時,即臨界調制工況(調制比大于1為過調制工況),A、B、C三相電壓的等效旋轉矢量Vref(V)以Vvo點為圓心旋轉。當Vref掃過第1扇區的小扇區4時,因為矢量V掃過扇區3和扇區5的時間很短,母線平衡能力差。其他五個大扇區同理。
2.4 改進虛擬矢量方法
2.4.1 扇區劃分
針對母線平衡能力較差的問題和扇區過度問題[11],提出一種改進方法。大扇區方式和傳統方式一樣也劃分為6個扇區。小扇區劃分方式為:一個大扇區分為8個小三角形區域,標示為11區、12區、21區、22區、3區、5區、41區、42區。
第1扇區劃分如圖5所示。

圖5 第1扇區劃分圖
圖5中:原來的1區被分解為兩個等面積區域11和12;原來的2區被分解為兩個等面積區域21和22;原來的4區被分解為兩個等面積區域41和42;原來的3區和5區保持不變。其中:11 區、21 區、41 區和3 區的矢量都采用3區的三角形頂點的三個矢量VVM1、VVS1、VVL1合成;21 區、22 區、42 區和5 區的矢量都采用5 區的三角形頂點的3個虛擬矢量VVM1、VVS2、VVL2合成。
本方法可以顯著簡化傳統虛擬矢量算法復雜的計算,處理原來系統難以處理的外部打破中點電位平衡因素,以及外部變化引起的點偏移,如并網逆變系統在電網跳變或不平衡跌落產生的中點偏移。總之,三角形區域按照三矢量原則,常規方式應該選取VVL2、VVM1、VVL1。實際上,新的虛擬矢量調制方法選取的是VVL2、VVS2、VVM1或者VVM1、VVS1、VVL1等效合成。這樣的好處是:VVL2、VVM1、VVL1這3個矢量屬于虛擬大矢量和虛擬中矢量,不具備母線平衡能力。小虛擬矢量VVS2、VVS1具備母線平衡能力。因此,只有合成三矢量中帶有小矢量,才具備更好的閉環母線平衡能力。
本文采用小扇區3和小扇區5區的三角形小矢量進行調制。由于VVS2、VVS1具有母線平衡調節能力,則可以非常有效地避免該問題。另外,改進的虛擬矢量方法中,I扇區的所有的矢量和時序圖都只用到2個(即矢量為原來3 區和原來的5區),原來要用5個時序圖,大大簡化了運算。
2.4.2 矢量作用時間計算
根據式(1),計算T1、T2和T3。
電壓Vref用3個矢量V1和V2和V3以及作用時間T1、T2和T3的乘積來等效。其中:Vref矢量作用時間Ts。因為時間是不可能是負的,最小也是0,所以實際軟件中需要作限幅處理。特別是針對過調制等工況,需要等比例進行變換。
2.4.3 時間狀態分配
通過五段式和七段式的仿真[12],與試驗結果進行比較。七段式的開關效率相對五段式雖然降低,但是可以大幅度減小調制引起的諧波。所以,優先采取七段式調制。在進行時間狀態分配的時候,采用七段式對稱輸出方式的第1扇區時間狀態分配如圖6所示 。

圖6 第1扇區時間狀態分配圖
2.4.4 中點平衡乒乓控制
與傳統虛擬空間矢量的劃分不同,新的方法需要對小扇區重新進行劃分;然后,再根據重新劃分的小扇區選擇和確定具體合成矢量。
根據式(1)解方程,可以得到T1,T2和T3。然后通過圖6方式來分配矢量以及作用時間,進而得到VVM1、VVS1、VVL1等矢量的作用時間TVM1、TVS1、TVL1,引入冗余因子f(f的選取范圍為0到1)。
引入冗余因子f后,正小矢量作用時間為:
(3)
負小矢量作用時間為:
(4)

這里需要著重強調的是,為了達到更好的精度,慣性思維容易將冗余因子f通過正負母線差控制器的輸出來設計。但是通過大量的仿真和試驗發現,這里采用乒乓控制(也就是滯回控制)較為理想。
相對于其他控制器,乒乓控制器在處理虛擬空間矢量中點平衡方面具備明顯優勢。這是因為傳統的PI控制器中的積分環節會把前面時刻的累積效應帶入現在時刻,在電流突變或者電壓跳變等工況下,往往調節能力很差,反應速度跟不上。乒乓控制器則沒有這個顧慮,可以不受上述誤差的影響,做到快速響應和實時調節。其調節的優越性遠遠超過傳統的PI控制器。
3 仿真及試驗
搭建Matlab/Simulink仿真平臺和樣機試驗平臺,完成軟件核心算法設計。虛擬矢量調制電壓波形如圖7所示。

圖7 虛擬矢量調制電壓波形
本次系統控制采用美國TI公司的DSP28335芯片,樣機為50 kVA的逆變器,裝置的額定電流有效值為IN=75 A,選用 Vincotech 公司型號為30-FT12NMA160SH02-M669F28的絕緣柵雙極型晶體管(insulated gate bipolar transistor,IGBT)(額定電流160 A),母線電容6 000 μF, 濾波電感1.2 mH和400 μH,濾波電容4.7 μF。變換器軟件控制部分,利用數字信號處理器(digital signal processor,DSP)算法產生IGBT驅動波形控制,利用DSP采集系統電壓、電流等。半負載到滿載突加突卸,直流側的上下電容電壓(也就是正負母線)經動態調節后基本可以達到平衡,隨動性能較好,保持了良好的動態調節能力。
負載突變工況下,試驗波形如圖8所示。

圖8 試驗波形
4 結束語
通過理論計算和仿真建模,構建并實現了一種新的三電平虛擬空間矢量的算法。該算法相對于傳統算法,大大減少了DSP芯片計算的復雜度,提高了母線
平衡動態機制,抑制了中點偏移,完善了三電平虛擬空間矢量技術。通過相關的試驗,驗證了該算法的可行性和有效性。
