自動擋雨預警推送蒸發器手機在線控制裝置研制
2019-10-10 02:21:38曹春號楊啟良李加念劉小剛喻黎明
農業工程學報 2019年16期
關鍵詞:檢測
曹春號,楊啟良,李加念,劉小剛,喻黎明
自動擋雨預警推送蒸發器手機在線控制裝置研制
曹春號,楊啟良※,李加念,劉小剛,喻黎明
(昆明理工大學現代農業工程學院,昆明 650500)
為消除蒸發器水面蒸發量檢測過程中因天然降雨對檢測結果的不利影響。在脈沖式蒸發器水面蒸發量手機在線檢測裝置基礎上增加了自動擋雨裝置和天氣預警及其擋雨裝置是否正常運轉的推送功能。該裝置通過個推軟件工具開發包實現了預警推送功能,并采用雨水傳感器感應板輸出的電信號變化感知是否出現降雨情況,實現了擋雨蓋遮擋和移除的智能控制。結果表明:1)裝置運行可靠,60次試驗中,擋雨蓋完全遮擋和回到初始位置、擋雨和移除擋雨蓋成功后,收到反饋消息的成功率均為98.3%;2)裝置運行穩定,支撐桿轉動的理論角度與實測角度的絕對誤差范圍為1.6°~3.5°,最大相對誤差為4.1%,最小相對誤差為1.9%。田間試驗結果表明,該裝置適應性較強,性能良好,支撐桿轉動的理論角度與實測角度的最大絕對誤差為3.4°。可見,該裝置不僅通過降雨感知進行擋雨,而且可以通過手機在線控制,查看降雨天氣預警、擋雨蓋完全遮擋蒸發器和回到初始位置是否成功的推送消息,提高了蒸發器擋雨操作的智能化水平,解決了蒸發器蒸發量檢測過程中因降雨造成檢測失敗的突出問題。該研究為智能擋雨和消息推送技術在農業智能設備研發中的應用提供了新思路。
蒸發;傳感器;降雨;蒸發器;預警推送;擋雨蓋;智能擋雨
0 引 言
蒸發器水面蒸發量研究能為氣象數據的預報、水資源評價、農作物的精準灌溉提供科學依據[1],但蒸發器水面蒸發量檢測結果受降雨影響的突出問題已引起諸多學者的普遍關注,主要體現在使蒸發量的檢測值為負值、偏小和偏大3個方面,其中,王積強等[2]提出暴雨天氣因“濺水誤差”存在,常出現“負蒸發”的情況。郝梅等[3-4]提出在降雨天氣蒸發量出現負值是由于落入蒸發器的雨量小于初始水位值但大于蒸發量。陳天珠[5]提出強降雨天氣,濺水不平衡,會導致蒸發量檢測結果偏小,并提出設置防濺水圈罩,但此方法并沒有在實踐中應用,且在應用中需在降雨前后多次往返試驗場地,自動化程度較低。曹春號等[6]研制了一種脈沖式蒸發器水面蒸發量手機在線檢測裝置,并提出在檢測水面蒸發量的過程中,因受降雨影響導致測定值比真實值偏小。李春玲[7]根據汛期降水集中且強度大的特點,分析得出大雨滴將蒸發器內部的水濺出,導致蒸發量測得值偏大。胡微[8]利用公式推導的方式,減少降雨天氣蒸發量的觀測誤差,但由于計算復雜和相關參數的可靠性較差,導致在實際蒸發量檢測中適用性較差。孫景春[9]分析了運用蒸發器觀測水面蒸發量時大雨滴引發濺水的問題,并針對濺水問題提出了相應的設想,但并沒有進行實際的驗證。黃錦速等[10]研究發現在強降雨天氣通過對蒸發器加蓋,能有效防止蒸發量測量失效。林梅香[11]通過在強降雨天氣,對蒸發器加蓋和不加蓋兩種不同情況下蒸發量進行對比分析,結果表明,對蒸發器加蓋可有效地避免蒸發量偏大或測量失效,保持蒸發量的完整性及準確性。雖然以上學者針對天然降雨對蒸發器蒸發量檢測結果的不利影響進行了分析,并提出了相應的設想或具體措施,但都不可避免地受到降雨的影響,且智能化水平低。目前,消息推送技術已經得到廣泛應用,并取得了較好的效果[12-16],因此,通過消息推送技術和降雨的準確預報可以提前做好擋雨的準備工作。基于此,本研究研制具有自動擋雨和預警推送功能的蒸發器水面蒸發量在線檢測裝置,解決傳統檢測裝置受降雨影響導致檢測結果失敗及降雨前后需數次前往試驗場地加蓋和移除等操作等突出問題,實現降雨天氣的在線預警功能和擋雨裝置操作成功與否的消息反饋推送,消除降雨天氣對蒸發器水面蒸發量檢測結果的不利影響,為蒸發器水面蒸發量的精準檢測提供新的思路和方法。
1 裝置總體方案設計
1.1 總體設計要求
擋雨裝置應用需滿足4點要求:1)能根據本地天氣預報狀況,提前對降雨天氣發出預警通知;2)運行過程穩定可靠;3)在進行自動擋雨或移除擋雨蓋操作后,操作成功與否的結果可推送至手機端;4)可進行擋雨操作的自動和在線控制。
1.2 裝置擋雨工作原理
降雨自動檢測采用的是雨水傳感器(深圳市天士凱電子有限公司,工作電壓5 V),該傳感器利用雨水的導電性,將電路的通斷狀態轉換為電信號輸出,通過電壓信號的變化判別是否發生降雨,由于該傳感器感應板面積較小,為增加雨水滴落檢測的成功率,使用20個雨水傳感器,并將其并聯。
未檢測到雨水滴落到傳感器感應板表面時,傳感器輸出為高電平,裝置的檢測狀態如圖1a所示,當檢測到雨水滴落到傳感器感應板表面時,如圖1b所示,步進電機轉動84.6°,使擋雨蓋處于蒸發器的正上方。
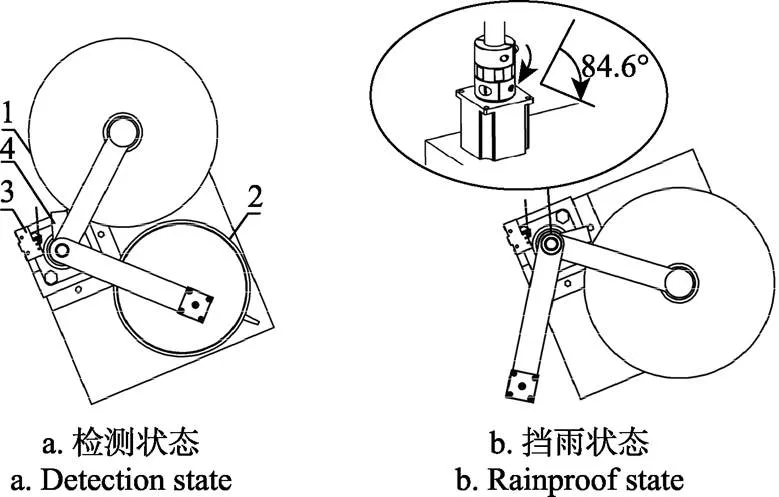
1. 擋雨蓋 2. 蒸發器 3. 行程開關 4. 觸桿
轉動角度的精確控制通過行程開關實現,裝置每次進行狀態轉換時,都要先逆時針轉動,當觸桿觸碰到行程開關進行復位操作后,再逆時針轉動所需的角度。
此外,操作人員也可通過手機app,發送擋雨或移除擋雨蓋指令,進行擋雨或移除擋雨蓋的遠程在線操作。
1.3 消息推送原理
為保證消息推送的準確性與穩定性,借助個推軟件開發工具包(software development kit,SDK)實現消息推送,個推是專業的為開發者提供消息推送解決方案的推送技術服務商[17-22],個推SDK具有簡單易集成、應用程序編程接口(application programming interface,API)調用靈活、高并發高吞吐、穩定高效低延時的優點,因此在智能手機軟件開發領域得到了廣泛的應用[23-25]。其推送原理如圖2所示,其中,CID為客戶端軟件的唯一標識。
基于TCP協議,個推服務器與物聯網服務器之間保持長連接,為保證消息推送和操作系統安全,設備標記(deviceToken)是經過蘋果推送通知服務(apple push notification service,APNs)加密后生成的,且在推送消息時,手機客戶端不在線時,只與APNs保持長連接,由APNs負責消息的轉送傳達,在線時,與個推服務器之間保持長連接,直接將消息推送至客戶端。
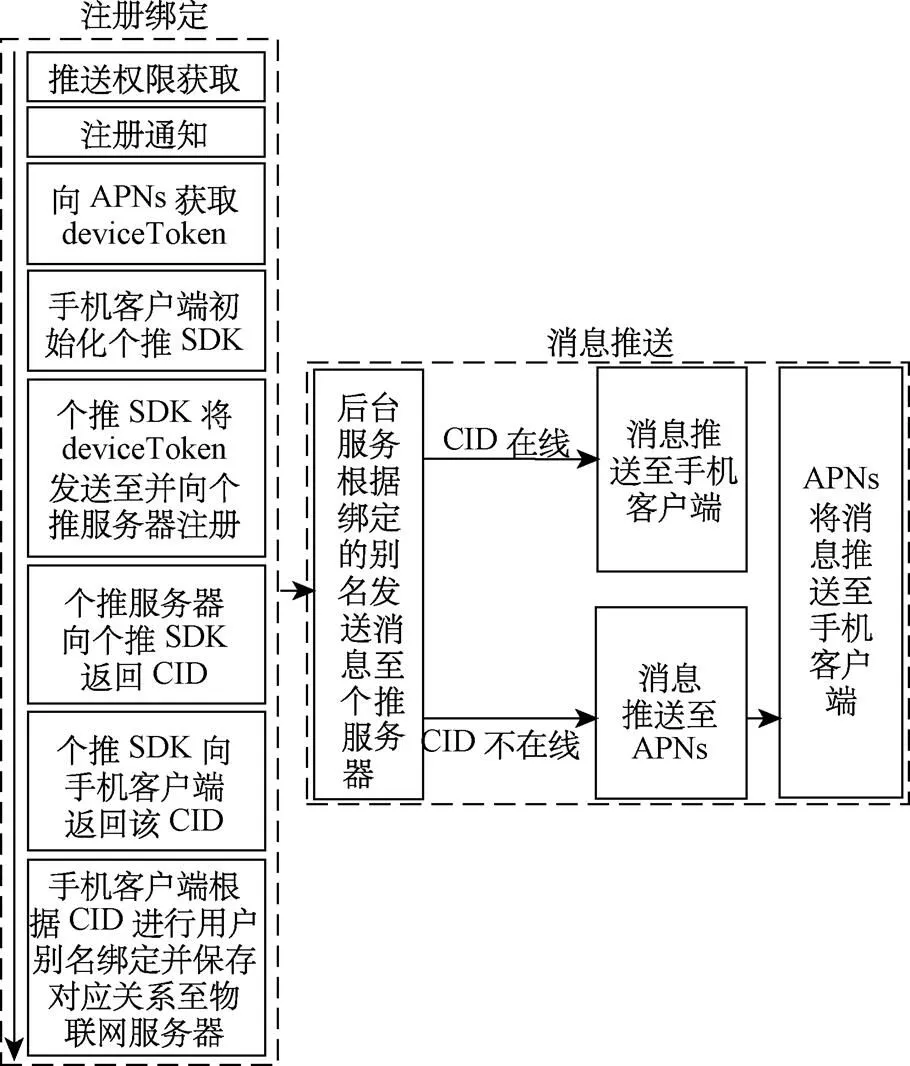
注:SDK為軟件工具開發包;CID為客戶端軟件的唯一標識;APNs為蘋果推送通知服務。
2 裝置硬件改進
2.1 結構改進
為增加擋雨功能,降低成本,增強裝置的實用性,在曹春號等[6]已研發設備的基礎上,設計出了如圖3所示的結構,旋轉臂和觸桿固定在支撐桿上,觸桿下方固定有軸承,用以保證支撐桿在轉動的時候,不會發生抖動現象。支撐桿的順時針和逆時針方向旋轉由 57BYG250B 步進電機(步距角1.8°)驅動,支撐桿穿過軸承與57BYG250B步進電機的傳動軸由聯軸器連接固定,行程開關安裝在與觸桿平行的同一平面位置,觸桿在支撐桿的帶動下可準確地觸碰到行程開關的觸點。
2.2 旋轉控制
選用57BYG250B步進電機(工作電壓9 V,相電流3.0 A)驅動支撐桿旋轉,由A4988步進電機驅動板驅動[26]。
所需轉動的角度、步距角和脈沖個數之間的關系為
N=R/S(1)
式中N為脈沖個數;R為步進電機所需轉動的角度,(°);S為步距角,(°)。57BYG250B步進電機需轉動的角度為84.6°,其步距角為1.8°,經計算可知,需要的脈沖個數為47個。A4988步進電機驅動板的細分參數可以通過該元件上的3個引腳MS1、MS2、MS3進行調節[27-32],如表1所示,3個引腳均設置為低電平,即57BYG250B步進電機在全步進模式下驅動支撐桿轉動即可。
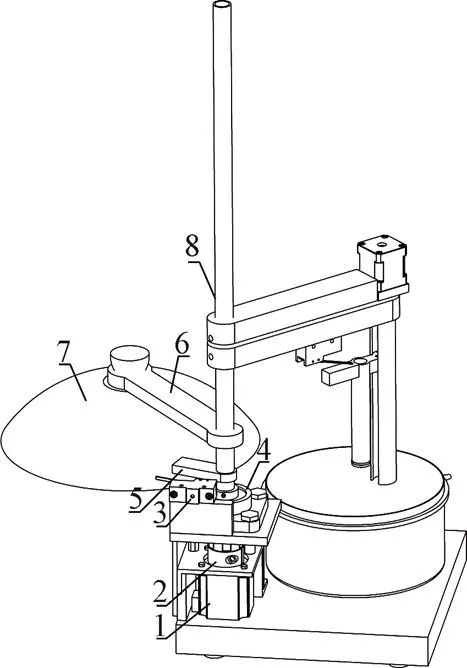
1.57BYG250B 步進電機 2.聯軸器 3.行程開關 4.軸承 5.觸桿 6.旋轉臂 7.擋雨蓋 8.支撐桿
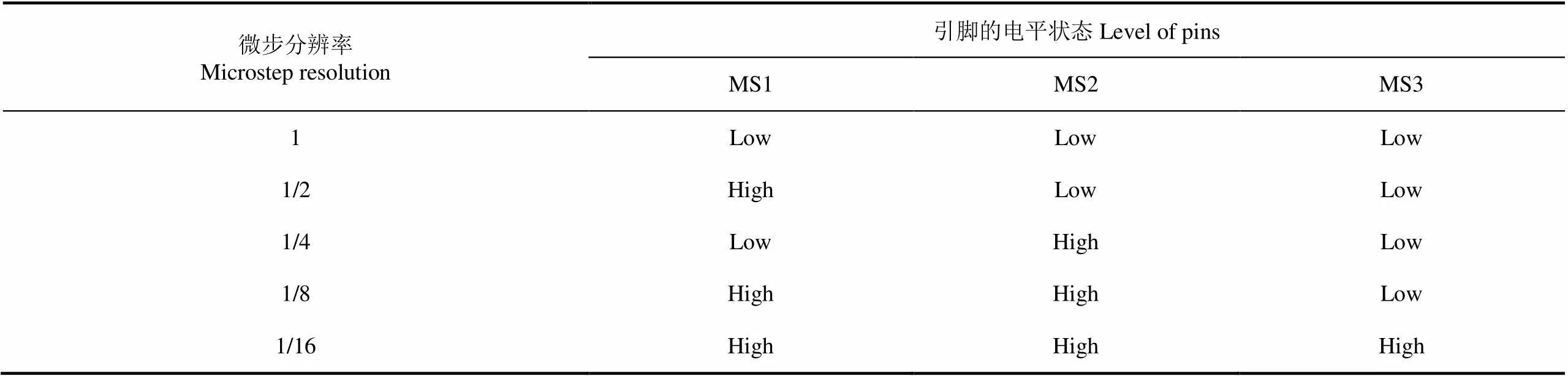
表1 不同微步分辨率時MS1-MS3引腳的電平狀態
3 底層軟件與手機端軟件改進
在編譯器Arduino 1.8.1中運用C語言編寫擋雨與移除擋雨蓋函數代碼,并進行封裝,以便手機端程序發送擋雨指令或雨水傳感器感應板檢測到雨滴滴落后調用擋雨函數,待手機端程序發送移除擋雨蓋指令或雨水傳感器感應板變干后,調用移除擋雨蓋函數。手機端程序在Xcode 9.4.1中使用Objective-C語言調用指令發送函數,并傳遞相應的指令參數。其程序流程圖如圖4所示。
在每次進行擋雨或移除擋雨蓋操作后,裝置都會向物聯網服務器發送消息反饋操作成功與否的結果,數據格式為腳本對象表示符號(javascript object notation,JSON),物聯網服務器通過解析封裝消息內容,將消息傳送給個推服務器,個推服務器與個推SDK根據CID進行通信,將消息推送至手機端軟件。服務器定時調用天氣預報的公共API,接收返回結果并解析,若結果判定為降雨天氣,則向手機端軟件推送降雨預警,方便蒸發量檢測人員提前做好擋雨準備。
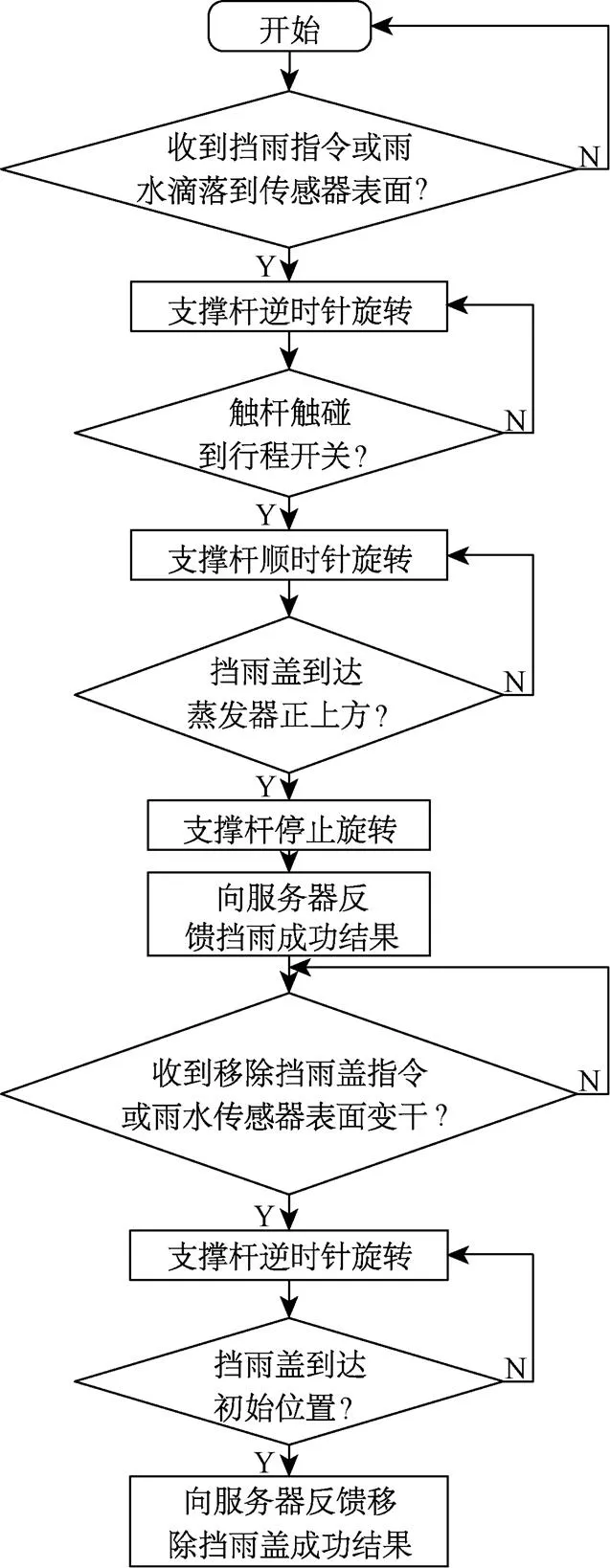
圖4 擋雨操作程序流程圖
4 裝置性能測試
4.1 試驗材料和裝置
試驗水樣為自來水,將其盛放到150 mL量筒中。接入220 V電源使裝置正常開機復位,處于蒸發量檢測狀態,擋雨蓋停留在初始位置。試驗開始前,將雨水傳感器感應板表面擦干,保證是干燥無水、無塵狀態,同時檢查并保證WiFi信號質量正常。試驗裝置如圖5所示。
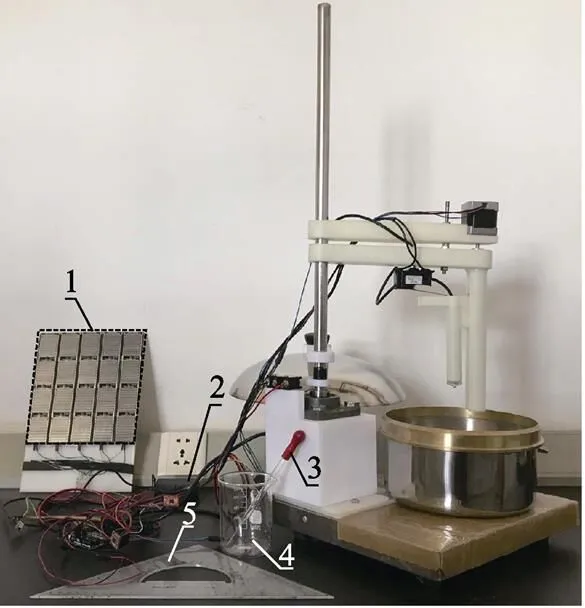
1.20個雨水傳感器 2.交流轉直流電源模塊 3.滴管 4.150 mL量筒 5.量角尺
4.2 試驗方法
裝置的性能通過以下3個方面進行測試和驗證:1)收到擋雨指令或雨水傳感器感應板上有水滴落,通過人工觀察擋雨蓋能否對蒸發器實現完全遮擋,并觀察接收到移除擋雨蓋指令或將感應板擦干,擋雨蓋能否回到初始位置;2)擋雨蓋處于蒸發器正上方或回到初始位置后,查看手機端軟件是否接收到操作成功的反饋消息推送;3)支撐桿轉動的理論角度和實測角度對比分析。
4.2.1 擋雨裝置的運行試驗
擋雨蓋完全遮擋蒸發器的成功率為
R=/×100% (1)
式中R為擋雨蓋完全遮擋蒸發器的成功率,%;為擋雨蓋完全遮擋蒸發器的成功總次數;為水滴落到傳感器感應板表面或發送擋雨指令的總次數。
手機app發送移除擋雨蓋指令或雨水傳感器表面變干,擋雨蓋回到初始位置的成功率為
C=/×100% (2)
式中C為手機app發送移除擋雨蓋指令或雨水傳感器表面變干,擋雨蓋回到初始位置的成功率,%;為擋雨蓋回到初始位置成功的總次數;為手機app發送移除擋雨蓋指令或把雨水傳感器表面擦干的總次數。
擋雨蓋處于蒸發器正上方后,手機app接收到擋雨成功的反饋消息推送的成功率為
Q=/×100% (3)
式中Q為擋雨蓋處于蒸發器正上方后,手機app接收到擋雨成功的反饋消息推送的成功率,%;為收到擋雨成功反饋消息推送的總次數;為擋雨蓋處于蒸發器正上方的總次數。
擋雨蓋回到初始位置后,手機app接收到移除擋雨蓋成功的反饋消息推送的成功率為
G=/×100% (4)
式中G擋雨蓋回到初始位置后,手機app接收到移除擋雨蓋成功的反饋消息推送的成功率,%;為手機app收到移除擋雨蓋反饋消息推送的總次數;為擋雨蓋回到初始位置的總次數。
4.2.2 擋雨裝置運行的可靠性與穩定性試驗
對20個雨水傳感器進行編號,用滴管依次將水滴滴到每個雨水傳感器的感應板或發送擋雨指令,觀察擋雨蓋能否成功移動至蒸發器的正上方,實現對蒸發器的完全遮擋。之后,再將雨水傳感的感應板擦干或發送移除擋雨蓋指令,觀察擋雨蓋能否成功回到初始位置。在每次消息擋雨蓋回到初始位置或完全遮擋蒸發器之后,查看手機app是否收到操作成功的推送消息,并檢驗推送結果是否正確。
由于步進電機自身具有會發生失步現象的特性,需要在進行擋雨操作后,將步進電機驅動支撐桿旋轉的理論角度與實測角度進行對比分析,并查看在擋雨蓋是否對蒸發器實現了完全遮擋。
4.3 結果與分析
4.3.1 裝置運行可靠性檢驗
裝置運行結果如表2所示。對20個雨水傳感器,3個重復試驗共60個試驗過程中,擋雨蓋完全遮擋蒸發器測試試驗,擋雨蓋實現完全遮擋蒸發器的成功次數為59次,成功率為98.3%,擋雨蓋處于蒸發器正上方后,手機app接收到擋雨成功的反饋消息推送的次數為59次,成功率為98.3%。擋雨蓋回到初始位置測試試驗中,擋雨蓋回到初始位置的成功次數為59次,成功率為98.3%,擋雨蓋回到初始位置后,手機app接收到移除擋雨蓋成功的反饋消息推送的次數為59次,成功率為98.3%,說明裝置運行可靠。5號雨水傳感器的1次試驗,擋雨蓋沒能完全遮擋蒸發器或回到初始位置的原因可能是WiFi網絡信號質量變差,也可能是雨水傳感器靈敏度不夠造成的。

表2 擋雨裝置運行試驗結果
4.3.2 裝置運行穩定性分析
裝置運行穩定性分析見表3,由表可知,理論角度與實測角度的最大絕對誤差為3.5°,最小絕對誤差為1.6°,最大相對誤差為4.1%,最小相對誤差為1.9%,且擋雨蓋均對蒸發器實現了完全遮擋,說明裝置運行穩定。產生誤差的原因可能是由于步進電機發生失步現象。
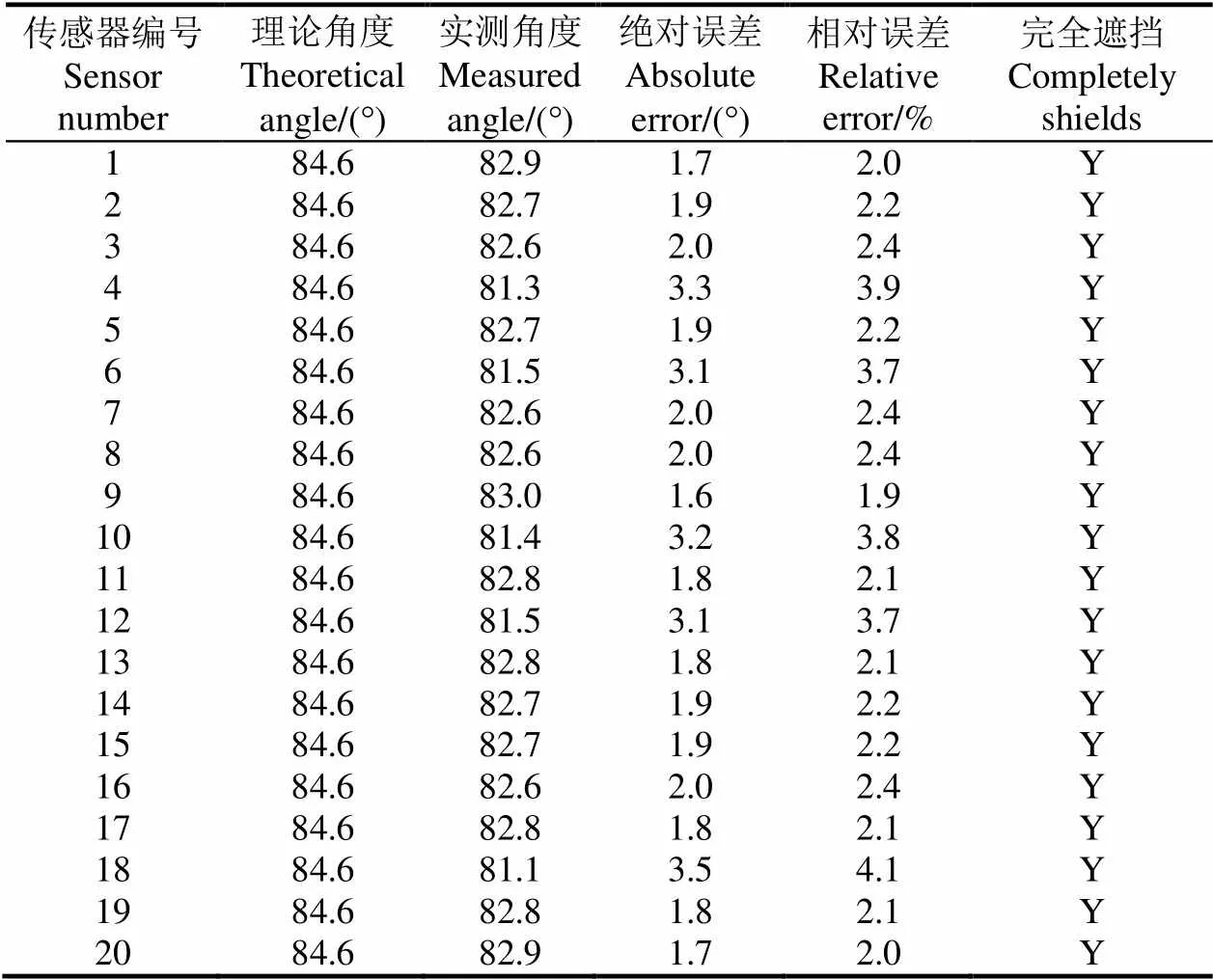
表3 支撐桿轉動的理論角度與實測角度誤差分析
5 田間試驗
為進一步驗證該裝置的可靠性與適應性,田間試驗于2019年3月1日—3月14日在昆明理工大學現代農業工程學院校內試驗基地進行。將裝置放置在露天環境的固定位置,天氣晴朗時,每天前往試驗場地查看擋雨蓋是否處在初始位置,待出現降雨天氣,從手機端查看是否收到擋雨成功的反饋信息,前往試驗場地查看擋雨蓋是否對蒸發器進行了完全遮擋,測量支撐桿轉動的實際角度,并記錄。待天氣晴朗,手機端收到擋雨蓋移除成功反饋后,再次前往查看雨水傳感器感應板是否已經變干且擋雨蓋回到了初始位置。試驗完成后,將14 d所測得的支撐桿轉動的理論角度與實測角度進行對比分析。結果如表4所示,支撐桿轉動的理論角度與實測角度的最大誤差為3.4°。且每次降雨天氣,都會提前收到降雨天氣預警,擋雨蓋都能對蒸發器進行完全遮擋,晴朗天氣,雨水傳感器表面變干,擋雨蓋又會完全移除,處在初始位置,在操作成功之后,手機app端均會接收到來自裝置的操作成功反饋消息推送。
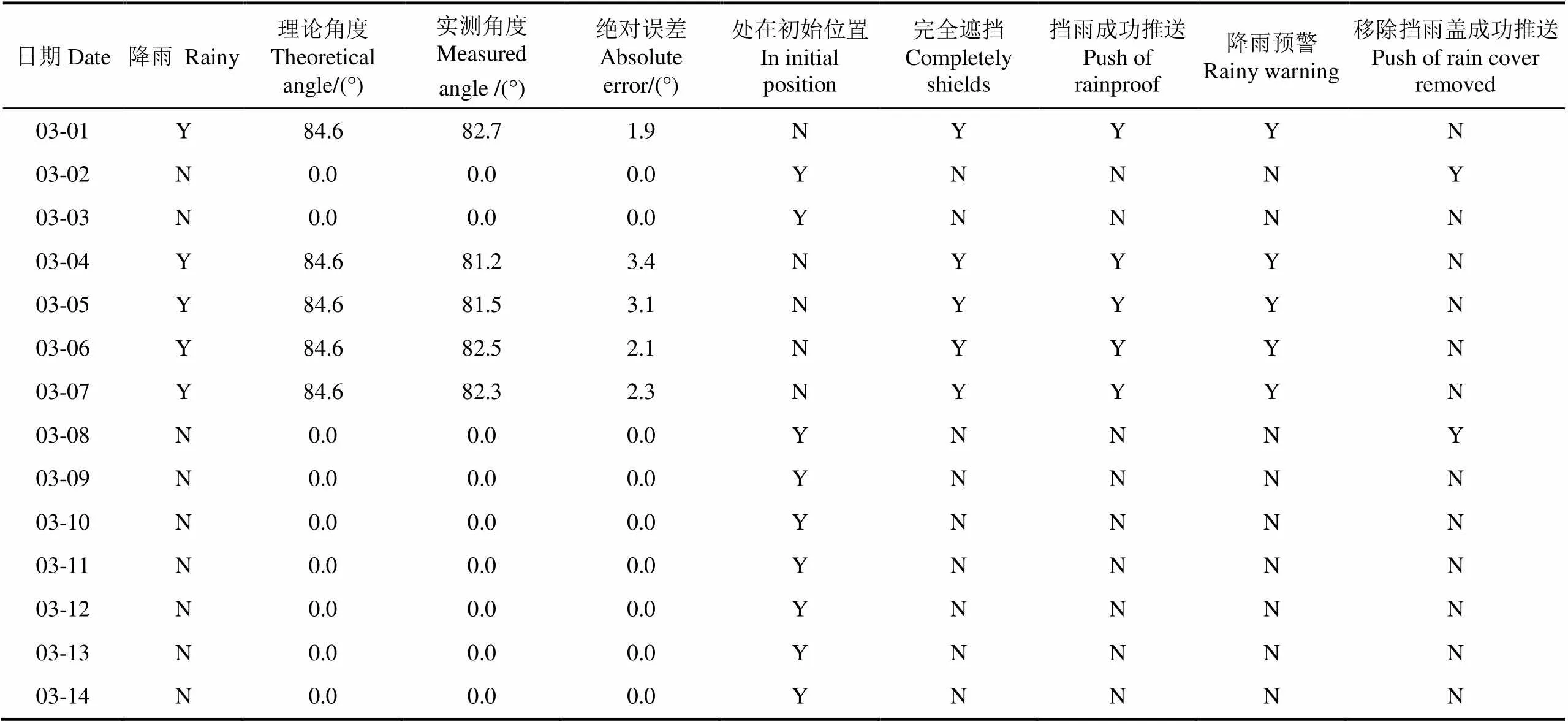
表4 擋雨裝置田間試驗結果
6 結 論
本文在脈沖式蒸發器水面蒸發量手機在線檢測裝置基礎上,基于雨水傳感器,集成個推軟件工具開發包,研制了能進行自動和手機在線擋雨控制的裝置。該裝置在擋雨或移除擋雨蓋成功后,能將操作成功的消息推送至手機軟件,且提前將降雨天氣的預警消息推送至手機app端,為蒸發器蒸發量檢測人員提供未來降雨的有效信息。
1)該裝置運行穩定可靠:支撐桿轉動的理論角度與實測角度的最大絕對誤差為3.5°,最小絕對誤差為1.6°,最大相對誤差為4.1%,最小相對誤差為1.9%,擋雨蓋完全遮擋蒸發器和擋雨蓋回到初始位置的成功率均為98.3%。反饋消息推送可靠,擋雨和移除擋雨蓋操作成功后,收到反饋消息的成功率均為98.3%。
2)田間試驗結果表明,降雨預警功能效果較好,本裝置可以適應田間蒸發器蒸發量檢測的在線和自動擋雨控制,支撐桿轉動的理論角度與實測角度之間的最大絕對誤差為3.4°。
由于本文所設計的擋雨裝置支撐桿旋轉的動力源自步進電機,難免造成失步現象,因此后續將使用伺服電機,采用閉環算法開展研究。
[1] 沈冰,黃紅虎. 水文學原理[M]. 北京:中國水利水電出版社,2008.
[2] 王積強,陸旭,劉巽民. 中國水面蒸發器的發展簡史與相關技術問題探討[J]. 水利技術監督,2011,19(3):9-11,39.
[3] 郝梅. 小型蒸發器蒸發量測定為負值的原因[J]. 廣東氣象,2005(3):48.
[4] 葉海寧,陶炳新,黃宏英. 小型蒸發器蒸發量測定為負值的原因及改進措施[J]. 現代農業科技,2010(18):31.
[5] 陳天珠. E601型蒸發器改進安裝方式及濺水影響的初步試驗研究[J]. 水文,1981(5) :24-28.
[6] 曹春號,楊啟良,李加念,等. 脈沖式蒸發器水面蒸發量手機在線檢測裝置研制[J]. 農業工程學報,2019,35(1):106-113. Cao Chunhao, Yang Qiliang, Li Jianian, et al. Design of water surface evaporation on-line detection device of pulse type evaporator[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(1): 106-113. (in Chinese with English abstract)
[7] 李春玲. 小型蒸發器蒸發量偏大的原因[J]. 氣象水文海洋儀器,2009,26(3):146-147. Li Chunling. The reason of large evaporation in small evaporator[J]. Meteorological, Hydrological and Marine Instruments, 2009, 26(3): 146-147. (in Chinese with English abstract)
[8] 胡微. 淺談特殊雨情下E-601型蒸發器的蒸發量計算[J]. 陜西水利,2011(5):148-150.
[9] 孫景春. 大雨濺水影響E_(601)蒸發器蒸發量問題的探討[J]. 吉林水利,2000(11):4.
[10] 黃錦速,李小紅,蔡偉坤,等. 蒸發器加蓋觀測方法及其效果研究[J]. 氣象水文海洋儀器,2014,31(2):39-41. Huang Jinsu, Li Xiaohong, Cai Weikun, et al. Observation methods of evaporator stamped and its effect study[J]. Meteorological, Hydrological and Marine Instruments, 2014, 31(2): 39-41. (in Chinese with English abstract)
[11] 林梅香. 淺談有強降水時小型蒸發器加蓋的意義[J]. 廣西氣象,2006(2):58. Lin Meixiang. Preliminary discussion for the significance of capping on the small evaporator when the strong precipitation occurring[J]. Journal of Guangxi Meteorology, 2006, (2): 58. (in Chinese with English abstract)
[12] 李淑華,郝星耀,周清波,等. 基于Web的自動灌溉控制系統數據實時推送設計與開發[J]. 農業工程學報,2015,31(15):133-139. Li Shuhua, Hao Xingyao, Zhou Qingbo, et al. Design and development of real time data push in web-based automatic irrigation control system[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(15): 133-139. (in Chinese with English abstract)
[13] Fulcher A, Chong J H, White S A, et al. Developing a mobile application as an extension education tool: A case study using IPMPro[J]. Acta Cardiologica, 2013, 23(4): 363-81.
[14] Sharma R, Kumar A, Pandey P S, et al. Krishikosh: A digital repository to disseminate agricultural knowledge[J]. Indian Journal of Agricultural Siences, 2018, 88(5): 757-765.
[15] Kyaw T Y, Ng A K. Smart aquaponics system for urban farming[J]. Energy Procedia, 2017, 143: 342-347.
[16] Fulcher A, Chong J H, White S A, et al. Testing, promoting, and launching a mobile application as an extension tool: A case study with IPMPro[J]. Horttechnology, 2013, 23(4): 407-410.
[17] 楊立揚,成國強. 基于個推消息推送系統的手機遙控器技術研究[J]. 無線互聯科技,2017,(23):142-144. Yang Liyang, Cheng Guoqiang. Study on mobile phone remote control technology based on getui message push system[J]. Wireless Internet Technology, 2017, (23): 142-144. (in Chinese with English abstract)
[18] 李立,李柳音. 數用“個旅”,游有智慧 以個推大數據為基礎,助力智慧旅游發展[J]. 信息化建設,2017(3):50-51.
[19] 鐘石根,張良杰. 基于個推的“好售平臺”聊天推送功能的實現[J]. 計算機光盤軟件與應用,2014,17(20): 57-58.
[20] 黃園. 基于圖像的車內生命體檢測系統設計與實現[D]. 南昌:江西師范大學,2017.Huangyuan. Design and Implementation of An In-car Life Detection System Based on Image[D]. Nanchang: Jiangxi Normal University, 2017. (in Chinese with English abstract)
[21] 高敏花. 工業遠程故障診斷與維護系統研究[D]. 包頭:內蒙古科技大學,2015. Gao Minhua. Research on Fault Diagnosis and Maintenance System in Industrial Remote Control[D]. Baotou: Inner Mongolia University of Science and Technology, 2015. (in Chinese with English abstract)
[22] 田潤亞. 藥品網絡銷售系統的設計與開發[D]. 南京:東南大學,2017. Tian Runya. Design and Development of Online Medical Sales System[D]. Nanjing: Southeast University, 2017. (in Chinese with English abstract)
[23] 賴正華. 基于Android和移動GIS的智能交通輔助系統[D].貴陽:貴州大學,2015. Lai Zhenghua. Intelligent Traffic Assistant System Based on Android and Mobile GIS[D]. Guiyang: Guizhou University, 2015. (in Chinese with English abstract)
[24] 周軒. 基于Android的汽車4S店服務管理系統設計與實現[D]. 北京:北京工業大學,2017. Zhou Xuan. The Design and Implementation of Auto 4S Shop Service Management System Based on Android[D]. Beijing: Beijing University of Technology, 2017. (in Chinese with English abstract)
[25] 李向前. 基于iOS的物流撮合交易系統的設計與實現[D].北京:北京郵電大學,2018. Li Xiangqian. Design and Implementation of Logistics Matching Transaction System Based on iOS[D]. Beijing: Beijing University of Posts and Telecommunications, 2018. (in Chinese with English abstract)
[26] 孫駿榮,蘇海永. 用 Arduino 全面打造物聯網[M]. 北京:清華大學出版社,2016.
[27] 嚴天辰,董昭陽,尹振紅. 智能課桌控制系統設計[J]. 產業與科技論壇,2018,17(19):72-73.
[28] 李天成. 基于總線控制技術的光纖定位系統設計[D]. 合肥:中國科學技術大學,2017. Li Tiancheng. Design of Multi-motor Distributed Control System for Optical Fibers Positioning Based on CAN Bus[D]. Hefei: China University of Science and Technology, 2017. (in Chinese with English abstract)
[29] 李秋實. 3D打印控制方案設計與實現[D]. 武漢:湖北工業大學,2016. Li Qiushi. Control Scheme Design and Implementation of 3D Printing[D]. Wuhan: Hubei University of Technology, 2013. (in Chinese with English abstract)
[30] 藍杰,張浩然. 基于STM32的微型步進電機驅動控制器設計[J]. 微型機與應用,2015,34(1):43-46. Lan Jie, Zhang Haoran. Design of micro stepping motor drive controller based on STM32[J]. Microcomputer & Its Applications, 2015, 34(1): 43-46. (in Chinese with English abstract)
[31] 譚秀騰,郭小定,李小龍,等. 基于ARM的桌面型3D打印機控制系統設計[J]. 應用科技,2014,41(5):57-61,66. Tan Xiuteng, Guo Xiaoding, Li Xiaolong, et al. Design of desktop 3D printer control system based on ARM[J]. Applied Science and Technology, 2014, 41(5): 57-61, 66. (in Chinese with English abstract)
[32] 汪靜. 金屬高能脈沖熔積快速成型系統關鍵技術研究[D]. 銀川:寧夏大學,2014. Wangjing. A Metal High-Energy Pulse Deposition Rapid Prototyping System Research on Key Technology[D]. Yinchuan: Ningxia University, 2014.
Design of mobile phone on-line control device for evaporator with automatic rainproof and early warning push function
Cao Chunhao, Yang Qiliang※, Li Jianian, Liu Xiaogang, Yu Liming
(650500,)
In this research, in order to eliminate the adverse effect of rainfall weather on the detection results of evaporator water surface evaporation, a mobile phone on-line control device for evaporator based on automatic rainproof and early warning push function was designed. The device consists of 57BYG250B stepper motor, coupler, limit switch, bearing, touch rod, rotating arm, 20 rain sensors and rain cover. The rotating arm and the touch rod were fixed on the supporting rod, and a bearing was fixed below the touch rod to ensure that the supporting rod would not flutter when it rotated. The clockwise and counterclockwise rotation of the supporting rod were driven by 57BYG250B stepper motor. The drive shaft of the supporting rod passing through the bearing and the 57BYG250B stepper motor were connected and fixed by the coupler. The limit switch was installed in the same plane position and parallel to the touch rod. A rotating arm was fixed on the supporting rod, and the rain cover was installed on the rotating arm. The output shaft of 57BYG250B stepper motor was connected with the supporting rod through the coupler. 20 rain sensors were connected in parallel to automatically detect whether there is rainfall by judging if the rain sensors output low level. The rotation of 57BYG250B stepper motor drove the rain cover to completely shield the evaporator and returned to its initial position. The data transmission format between Internet of Things server and push server, Internet of Things server and mobile app, Internet of Things server and the device developed is JSON. The Internet of Things server was called public API of weather forecast regularly, and the mobile terminal integrated GeTui SDK for rainfall warning, evaporator completely-shielded and backed to initial position. The MCU program uses C language to compile the code of rainproof and removal of rain cover, and encapsulates it. The mobile program sent rainproof instructions or the rain sensor detected rainwater falling on the surface of the sensor, which would call the rainproof function. When the mobile program issued a rain-shield removal instruction or the rain sensor was dried, the rain-cover removal function was produced. The mobile program called the instruction sending function in Objective-C language and passed the corresponding instruction parameters. The stability and reliability of the device were verified by testing the performance of 20 rain sensors and 57BYG250B stepper motor. The results showed that 1) the device was reliable in operation. In 60 tests, the success rate of complete shelter and returning to the initial position of the rain shield was 98.3%; 2) the operation of the device was stable, and the error range of the theoretical angle of the support rod rotation and the measured angle was 1.6°-3.5°, the maximum relative error was 4.1%, and the minimum relative error was 1.9%; 3) In the reliable test of 60 message pushes, the success rate of receiving feedback messages was 98.3% after the rain and the rain cover were removed successfully. Field test results showed that 5 days in 14 days are rainy days. The rain warning message has been
before it rains. The device has strong adaptability and good performance and its maximum error range was 3.4°. The device could not only automatically passes perception of rainfall to rainproof, but also be operated online by mobile phone to give early warning notice for rainy weather. The successful push message of the evaporator completely blocked by the rain cover and returned to the initial position, which improved the intelligent level of the evaporator rainproof operation. This research provided new ideas for the application of intelligent rainproof technology and message push technology in the development of agricultural intelligent equipment.
evaporation; sensors; precipitation; evaporator; warning push; rain cover; intelligent rainproof
2019-04-23
2019-07-05
國家自然科學基金(51779113);云南省教育廳科學研究基金研究生項目(2019Y0032)
曹春號,主要從事農業智能化檢測與控制技術研究。Email:751627024@qq.com
楊啟良,教授,博士,主要從事高新技術在農業工程中的應用研究。Email:yangqilianglovena@163.com
10.11975/j.issn.1002-6819.2019.16.016
TP212.6
A
1002-6819(2019)-16-0145-07
曹春號,楊啟良,李加念,劉小剛,喻黎明.自動擋雨預警推送蒸發器手機在線控制裝置研制[J]. 農業工程學報,2019,35(16):145-151. doi:10.11975/j.issn.1002-6819.2019.16.016 http://www.tcsae.org
Cao Chunhao, Yang Qiliang, Li Jianian, Liu Xiaogang, Yu Liming. Design of mobile phone on-line control device for evaporator with automatic rainproof and early warning push function[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(16): 145-151. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.16.016 http://www.tcsae.org
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48