基于網(wǎng)格密度峰值聚類的實時雷達分選系統(tǒng)
2019-10-18 11:13:14顧軍華張亞娟
計算機應(yīng)用與軟件 2019年10期
顧軍華 田 喆 蘇 鳴 張亞娟
(河北工業(yè)大學人工智能與數(shù)據(jù)科學學院 天津 300401)(河北省大數(shù)據(jù)計算重點實驗室 天津 300401)
0 引 言
雷達分選是雷達信號處理中的重要一環(huán),只有從交疊的雷達數(shù)據(jù)中分解出每個雷達的數(shù)據(jù),才能對雷達數(shù)據(jù)進行準確分析,因此雷達分選的準確性直接影響了雷達的性能。隨著雷達的廣泛應(yīng)用,雷達所處的電磁環(huán)境日益復雜[1],單純依靠脈沖重復周期(PRI)的分選系統(tǒng)已經(jīng)無法滿足人們對雷達分選準確度的需求。近年來,有學者提出基于聚類的雷達分選系統(tǒng)[2],這類方法無須先驗信息,可以處理嚴重重疊的雷達數(shù)據(jù)。針對雷達分選系統(tǒng)的實時性要求,實際應(yīng)用中常采用數(shù)據(jù)流聚類算法進行分選。
CluStream算法是最早出現(xiàn)的數(shù)據(jù)流聚類算法,該算法包含在線和離線兩個階段,這種高效的框架成為了數(shù)據(jù)流聚類的主流框架。CluStream算法存在只能發(fā)掘球狀類、不能識別噪聲點等問題,為了解決上述問題,提出基于網(wǎng)格的數(shù)據(jù)流聚類算法(D-Stream算法),該算法通過將數(shù)據(jù)點映射到網(wǎng)格,提升了算法效率。此后,出現(xiàn)了大量對D-Stream算法的改進[3],其中ExCC算法[4]按照每個維度的特性分配各個維度的粒度來劃分網(wǎng)格,并且在線階段考慮了數(shù)據(jù)流流速,具有很好的效率。但是上述基于網(wǎng)格的數(shù)據(jù)流聚類算法,存在著容易丟失聚類的邊界和容易將距離較近類合并的問題。
針對上述兩個問題,本文提出了基于網(wǎng)格密度峰值的數(shù)據(jù)流聚類算法(GDP-Stream)。該算法首先于在線階段采用一種新的雙重網(wǎng)格劃分方式來建立概要數(shù)據(jù)結(jié)構(gòu),極大地減少了聚類邊界丟失的概率。其次,鑒于密度峰聚類算法(DPC)[5]可以很好地區(qū)分距離較近的類,因此本文算法通過在離線階段融入改進的DPC算法,來避免傳統(tǒng)網(wǎng)格合并方法容易將距離較近的類合并的問題。為了證明GDP-Stream算法可以有效地進行雷達分選,本文將GDP-Stream算法、ExCC算法和DP-Stream算法[6]在仿真雷達數(shù)據(jù)集上進行對比實驗。其中,DP-Stream算法是一種基于DPC的數(shù)據(jù)流聚類算法。結(jié)果表明,GDP-Stream算法相比于ExCC算法和DP-Stream算法有著更高的準確度和抗干擾能力。
1 GDP-Stream算法
GDP-Stream算法的框架如圖1所示。

圖1 GDP-Stream算法框架圖
在線階段,不斷接收數(shù)據(jù)流,采用雙重網(wǎng)格劃分生成并維護概要數(shù)據(jù)結(jié)構(gòu)。當收到用戶發(fā)來的聚類請求時,算法進入離線階段,執(zhí)行基于改進DPC算法的網(wǎng)格合并,生成聚類結(jié)果。
1.1 在線階段
數(shù)據(jù)流樣本集X={X1,X2,…,Xn}是由n個有d維屬性的數(shù)據(jù)樣本點Xi={Xi1,Xi2,…,Xij,…Xid}組成的,Xij為X中第i個樣本點的第j維屬性。數(shù)據(jù)空間的上界M={M1,M2,…,Md},下界m={m1,m2,…,md},其中Mi=max(X1i,X2i,…,Xni),mi=min(X1i,X2i,…,Xni)。
定義1(靜態(tài)網(wǎng)格) 由數(shù)據(jù)空間對每一維k等分得到。網(wǎng)格邊長l={l1,l2,…,ld}。靜態(tài)網(wǎng)格Gi的密度DGi為靜態(tài)網(wǎng)格中包含的數(shù)據(jù)點數(shù)量。當靜態(tài)網(wǎng)格密度大于用戶設(shè)置的密度閾值DT時,稱該靜態(tài)網(wǎng)格為高密度靜態(tài)網(wǎng)格,否則稱低密度靜態(tài)網(wǎng)格。
定義2(數(shù)據(jù)樣本點之間的距離) PDW中不同屬性的量綱差別很大[7],為避免影響聚類準確性,本文對歐式距離進行min-max歸一化改進,數(shù)據(jù)樣本點Xi和Xj的距離如下所示:
(1)
傳統(tǒng)網(wǎng)格聚類算法多采用靜態(tài)網(wǎng)格劃分。網(wǎng)格數(shù)量隨數(shù)據(jù)維數(shù)增長而激增,降低了算法的效率。并且這種劃分直接丟棄低密度網(wǎng)格中的點,容易丟失聚類的邊界。本文基于文獻[2]進行改進,提出雙重網(wǎng)格劃分,該方法有效濾除了噪聲點,并在下文的網(wǎng)格合并過程中只對動態(tài)網(wǎng)格進行操作,由于動態(tài)網(wǎng)格數(shù)量不隨維度一起增長,提高了效率。
定義3(動態(tài)網(wǎng)格) 以Xi點為網(wǎng)格中心,定義1中的網(wǎng)格邊長l為邊長創(chuàng)建的網(wǎng)格稱為動態(tài)網(wǎng)格。以Xi點為中心的動態(tài)網(wǎng)格的密度DXi為動態(tài)網(wǎng)格中數(shù)據(jù)點的個數(shù)。
當有數(shù)據(jù)點屬于兩個動態(tài)網(wǎng)格,則稱這兩個動態(tài)網(wǎng)格相交。如圖2所示,求一個動態(tài)網(wǎng)格的相交動態(tài)網(wǎng)格時,只需搜索與該動態(tài)網(wǎng)格中心點所在靜態(tài)網(wǎng)格相鄰的靜態(tài)網(wǎng)格即可。
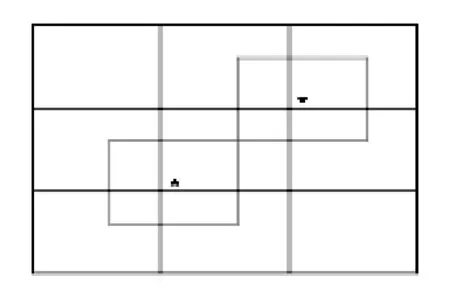
圖2 相交動態(tài)網(wǎng)格
對數(shù)據(jù)流X={X1,X2,…,Xn}執(zhí)行雙重網(wǎng)格劃分,生成并維護概要數(shù)據(jù)結(jié)構(gòu)的具體步驟如下:
(1) 設(shè)置參數(shù):噪聲過濾閾值DT、靜態(tài)網(wǎng)格劃分份數(shù)k、數(shù)據(jù)點最大數(shù)量max_X。
(2) 積累一定的數(shù)據(jù)點,計算X的上界M和下界m,根據(jù)靜態(tài)網(wǎng)格劃分份數(shù)k,計算網(wǎng)格邊長l。
(3) 進行靜態(tài)網(wǎng)格劃分,將數(shù)據(jù)空間k等分。
(4) 從數(shù)據(jù)流X接收一點Xi,存入X_list。
(5) 若X_list中數(shù)據(jù)點總量達到max_X,則刪除最早到達的數(shù)據(jù)點,如果該數(shù)據(jù)點所處的靜態(tài)網(wǎng)格退化為低密度靜態(tài)網(wǎng)格,則刪除該靜態(tài)網(wǎng)格中包含的動態(tài)網(wǎng)格。
(6) 求Xi所屬靜態(tài)網(wǎng)格Gi,更新DGj。
(7) 如果DGj由低密度靜態(tài)網(wǎng)格轉(zhuǎn)變?yōu)楦呙芏褥o態(tài)網(wǎng)格,則執(zhí)行(8),否則執(zhí)行(10)。
(8) 對Gj中每一個數(shù)據(jù)點,判斷該點能否落入某個已存在的動態(tài)網(wǎng)格中。若能,則將該點存入該動態(tài)網(wǎng)格中;若不能,則以該點為中心,根據(jù)網(wǎng)格邊長創(chuàng)建一個新的動態(tài)網(wǎng)格。
(9) 判斷與Gj相鄰的低密度靜態(tài)網(wǎng)格中的每個點能否落入(8)中新創(chuàng)建的動態(tài)網(wǎng)格,若能則存入。
(10) 若X中有數(shù)據(jù)點未處理,則執(zhí)行(4),否則在線階段結(jié)束。在線階段,得到一組靜態(tài)網(wǎng)格和動態(tài)網(wǎng)格,作為概要數(shù)據(jù)結(jié)構(gòu)。
如圖3所示,雙重網(wǎng)格劃分可以很好地處理靜態(tài)網(wǎng)格劃分存在的聚類邊界丟失問題。

圖3 網(wǎng)格劃分對比
1.2 離線階段
離線階段對在線階段生成的概要數(shù)據(jù)結(jié)構(gòu)(靜態(tài)網(wǎng)格和動態(tài)網(wǎng)格)執(zhí)行網(wǎng)格合并。
按照傳統(tǒng)的網(wǎng)格合并思路,直接合并相交的動態(tài)網(wǎng)格,可以高效地處理復雜形狀類,如圖4所示。
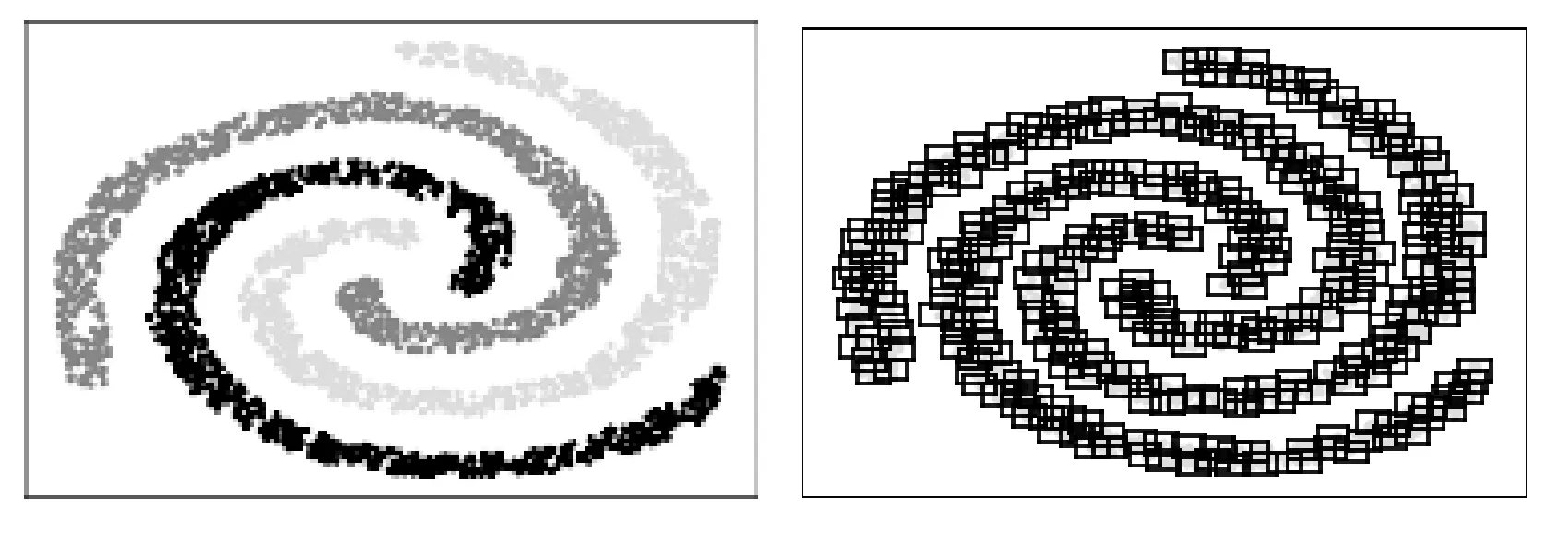
圖4 傳統(tǒng)網(wǎng)格合并
但是這種合并方式只考慮了局部信息,缺乏對數(shù)據(jù)空間的整體考量,如果兩個類距離較近,很可能被合并為一類,如圖5所示。
文獻[5]提出DPC算法,該算法的思想是首先求出密度峰作為聚類中心,密度峰為本身局部密度大并且與其他局部密度更大數(shù)據(jù)點的距離較大的點;然后將其他數(shù)據(jù)點歸類到相應(yīng)的密度峰。DPC算法對聚類中心的挖掘,考慮了數(shù)據(jù)空間的整體特性,可以很好地區(qū)分距離較近的類[8-10]。參考DPC算法中密度峰的定義,密度峰動態(tài)網(wǎng)格的定義如下:
定義4(密度峰動態(tài)網(wǎng)格) 當動態(tài)網(wǎng)格擁有較高密度,且與其他密度更大的動態(tài)網(wǎng)格之間的距離較大,稱其為密度峰動態(tài)網(wǎng)格。本算法采用文獻[11]中的密度峰指標ZXi如下:
(2)
式中:dmXi為以Xi為中心的動態(tài)網(wǎng)格與更高密度動態(tài)網(wǎng)格之間的最小距離:
ZXi=DXi×dmXi
(3)
首先計算所有動態(tài)網(wǎng)格的ZXi,排除ZXi最大的動態(tài)網(wǎng)格,對于剩下動態(tài)網(wǎng)格排序后的序列為Z={Z1,Z2,…,Zm},其中m為ZXi值不為最大值的點的動態(tài)網(wǎng)格數(shù)量。
I=argmaxi((Zi-1-Zi)-(Zi-Zi+1))
(4)
稱{Z1,Z2,…,ZI}所對應(yīng)的動態(tài)網(wǎng)格為密度峰動態(tài)網(wǎng)格。
但是DPC算法有著效率低的缺點,并且容易把復雜形狀的類劃分為多個類。不能將DPC算法中的方法直接用于本文對動態(tài)網(wǎng)格的合并,因此本文對DPC算法思想提出如下改進。
改進1:降低挖掘密度峰動態(tài)網(wǎng)格的時間消耗。
定義5(密度極大動態(tài)網(wǎng)格) 當動態(tài)網(wǎng)格密度不小于它的任意一個相交動態(tài)網(wǎng)格密度,且大于所有動態(tài)網(wǎng)格平均密度,稱該動態(tài)網(wǎng)格為密度極大動態(tài)網(wǎng)格。
密度極大動態(tài)網(wǎng)格的ZXi較大,密度峰動態(tài)網(wǎng)格大多存在于密度極大動態(tài)網(wǎng)格中。求得密度峰動態(tài)網(wǎng)格的時間復雜度為O(m2)。為了提高效率,本算法首先用O(m)的復雜度求得密度極大動態(tài)網(wǎng)格,再從所有密度極大動態(tài)網(wǎng)格中求得密度峰動態(tài)網(wǎng)格。
改進2:降低非密度峰動態(tài)網(wǎng)格歸類時間消耗。
定義6(動態(tài)網(wǎng)格集) 對于以Xi點為中心的密度峰動態(tài)網(wǎng)格,稱以它為基礎(chǔ)歸類得到的動態(tài)網(wǎng)格集為CXi。
如果按照DPC算法中思想進行歸類,對于每個非密度峰動態(tài)網(wǎng)格,將它按密度降序的順序歸類到密度大于它且距離最近的動態(tài)網(wǎng)格所屬的類中,得到動態(tài)網(wǎng)格集。
本算法改進的歸類方法如下:首先將所有動態(tài)網(wǎng)格按密度降序排序,之后按順序進行歸類。對于非密度極大動態(tài)網(wǎng)格,因為一定存在密度大于它的動態(tài)網(wǎng)格與它相交,相交的動態(tài)網(wǎng)格之間的距離一定小于不相交的,所以只需搜索與它相交的動態(tài)網(wǎng)格,從中找到密度大于它且距離最近的動態(tài)網(wǎng)格,即為所求。上文中提到,求相交動態(tài)網(wǎng)格相比于求距離最近動態(tài)網(wǎng)格只需要很少的時間,所以歸類的效率得到了很大的提高。對于密度極大動態(tài)網(wǎng)格,無法快速求解,因此按照DPC算法的方法求解。但是由于密度極大動態(tài)網(wǎng)格數(shù)量較少,所以時間損耗不大。
改進3:避免復雜形狀類被劃分為多個類。
復雜形狀的類會存在多個密度峰,DPC算法會把非密度峰點歸類到密度峰所屬的類,所以容易導致復雜形狀的類被錯誤的劃分為多個類[8]。
為解決該問題,本文引入了相似度。通過觀察發(fā)現(xiàn),同一個類中的動態(tài)網(wǎng)格應(yīng)該具有相似的密度;若相鄰動態(tài)網(wǎng)格集屬于同一類,則它們之間相交動態(tài)網(wǎng)格的平均密度不會與它們兩個的平均密度差距很大。則相似度定義如下:
定義7(相似度) 動態(tài)網(wǎng)格集CXi和CXj之間的相似度為:
(5)

(6)
式中:d(CXi)為CXi中動態(tài)網(wǎng)格的平均密度。式(5)為相對密度差,當sim(CXi,CXj)超過一定閾值SIMT后判定兩個動態(tài)網(wǎng)格集相似,合并CXi和CXj。
基于改進DPC算法的網(wǎng)格合并的步驟如下:
(1) 設(shè)置相似度閾值SIMT。
(2) 將所有動態(tài)網(wǎng)格,按照密度從大到小排序。
(3) 找到所有密度極大動態(tài)網(wǎng)格。
(4) 從密度極大動態(tài)網(wǎng)格中找到密度峰動態(tài)網(wǎng)格。
(5) 對所有非密度峰動態(tài)網(wǎng)格進行歸類,生成一組動態(tài)網(wǎng)格集。
(6) 對于每兩個相交動態(tài)網(wǎng)格集CXi和CXj,當sim(CXi,CXj)≥SIMT時,合并CXi和CXj。
(7) 將動態(tài)網(wǎng)格聚類結(jié)果,映射到數(shù)據(jù)點。當數(shù)據(jù)點屬于多個不同類動態(tài)網(wǎng)格時,將其歸屬于距離最近的動態(tài)網(wǎng)格所屬的類。
2 仿真實驗分析
2.1 雷達信號仿真
脈沖描述字(PDW)流的生成流程如下:
(1) 單部雷達PDW流產(chǎn)生:PDW中脈沖載頻(RF)、脈沖寬度(PW)以及脈沖到達角(DOA)三個屬性最為穩(wěn)定,常用來作為雷達分選系統(tǒng)的依據(jù)。脈沖重復周期(PRI)屬性,用來計算每個脈沖的到達時間(TOA)。因此,本文的雷達信號需要對上述四個屬性進行仿真。其中,PW誤差為1%;DOA誤差為2°;RF分為固定、捷變、跳變,誤差為1%。TOA由下式確定:
TOAn=TOAn-1+PRI+ω
(7)
式中:PRI分為固定、抖動、參差和滑變,TOA0為脈沖初始到達時間,誤差ω為PRI的1%。
(2) 干擾脈沖數(shù)據(jù)流產(chǎn)生:在真實的電子偵察活動中,會有噪聲數(shù)據(jù)進入雷達分選系統(tǒng)。本文通過在隨機時刻加入處在數(shù)據(jù)空間值域內(nèi)的偽隨機數(shù)來模擬干擾脈沖。
(3) 排序處理:多部雷達的PDW流產(chǎn)生后,需要將多個脈沖序列依照TOA排序融合成一個脈沖序列,從而得到整個PDW流。
(4) 重疊處理:當某一脈沖的到達時間小于前一脈沖的結(jié)束時間,就會出現(xiàn)不同雷達脈沖在時域上重疊的現(xiàn)象。當發(fā)生脈沖重疊時,本文按照5%的概率進行了丟失處理。
仿真實驗?zāi)M了4部不同類型雷達的PDW流。同時加入了雷達脈沖總數(shù)10%的干擾脈沖,具體參數(shù)設(shè)置如表1所示。圖6為數(shù)據(jù)點分布圖。
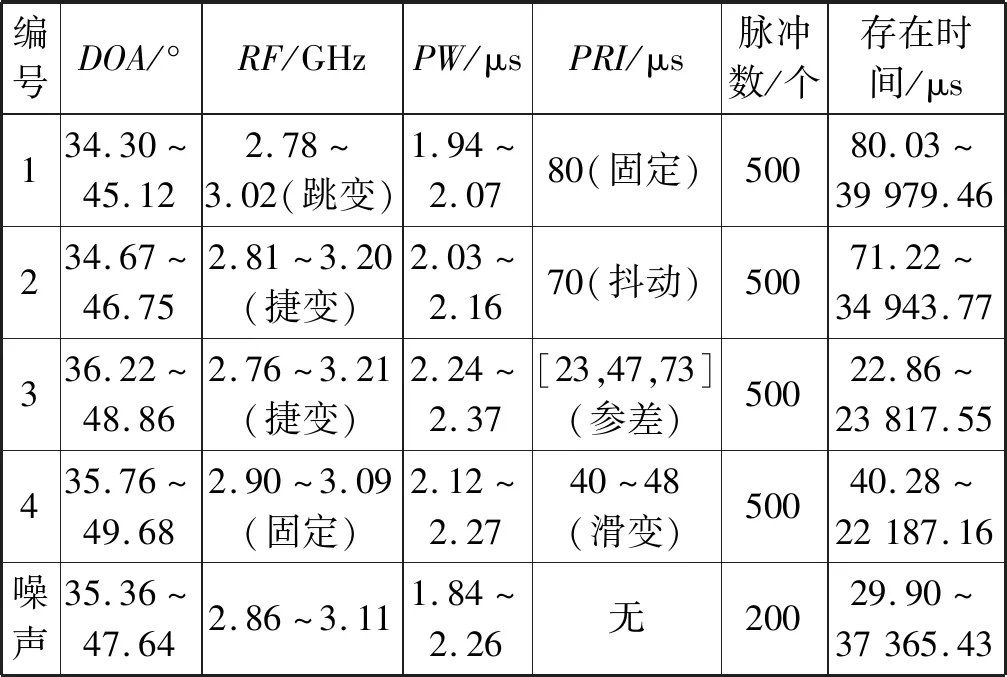
表1 實驗數(shù)據(jù)參數(shù)表

(a) 數(shù)據(jù)點三維分布圖
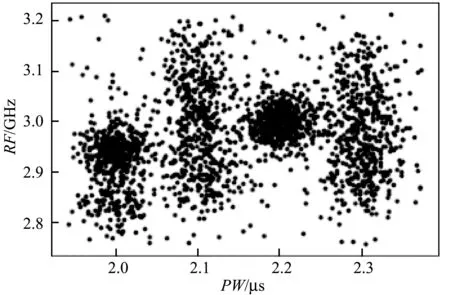
(b) 含噪聲數(shù)據(jù)點PW-RF分布圖圖6 數(shù)據(jù)點分布圖
由圖6可以看到4部雷達的脈沖載頻RF、PW以及脈沖到達角DOA三個屬性都嚴重重疊在一起,可以用來檢驗雷達分選系統(tǒng)在復雜信號環(huán)境中的有效性。
2.2 實驗結(jié)果分析

為了觀察GDP-Stream算法求得密度峰動態(tài)網(wǎng)格的效果,在T1=7 152.59 μs(第500個數(shù)據(jù)點到達時刻)、T2=10 700.87 μs(第750個數(shù)據(jù)點到達時刻)和T3=14 255.53 μs(第1 000個數(shù)據(jù)點到達時刻)分別求得密度峰動態(tài)網(wǎng)格。如圖7所示,為了方便觀察,將密度峰動態(tài)網(wǎng)格投影到PW-RF平面。可以看出GDP-Stream算法在T1和T2時刻比較準確地求得了每個類的密度峰動態(tài)網(wǎng)格,T3時刻由于類內(nèi)密度的暫時變化,導致該時刻求得的密度峰動態(tài)網(wǎng)格數(shù)量過多,但是由于GDP-Stream算法會合并相似度超過SIMT的相鄰動態(tài)網(wǎng)格集,因此過多的密度峰動態(tài)網(wǎng)格數(shù)量并不會影響聚類質(zhì)量。

圖7 密度峰動態(tài)網(wǎng)格圖
本文采用聚類準確度(CA)作為聚類效果的評價標準,它表示正確聚類的數(shù)據(jù)點數(shù)占總數(shù)據(jù)點數(shù)的比例,計算方法如下:
(8)
式中:n代表總數(shù)據(jù)點數(shù),|Cj∩Pk|表示屬于第k聚類并且屬于真實分組第j組的記錄數(shù)目。準確度在[0,1]內(nèi),準確度越大表示聚類效果越好。
為了說明GDP-Stream算法的有效性,本文分別把GDP-Stream算法與ExCC算法以及DP-Stream算法(參數(shù)設(shè)置見文獻[4]、文獻[6])在多個時刻的聚類準確度進行對比。如圖8所示,GDP-Stream算法和DP-Stream算法相比于ExCC算法,有著更好的聚類準確度,這是因為GDP-Stream算法采用動態(tài)網(wǎng)格劃分方式,會產(chǎn)生聚類邊界丟失問題。而DP-Stream算法則由于直接采用DPC算法的思路所以不容易丟失聚類邊界。在大多數(shù)時刻GDP-Stream算法聚類準確度好于DP-Stream算法,這是因為單純使用DPC算法的聚類方法,會導致復雜形狀的類被劃分成多個小類。
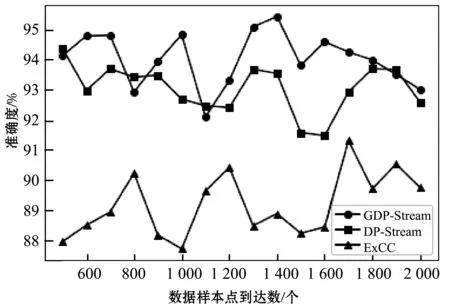
圖8 實驗結(jié)果對比圖
3 結(jié) 語
本文針對日益復雜的電磁環(huán)境,提出一種基于網(wǎng)格密度峰值聚類的實時雷達分選系統(tǒng),該算法將基于網(wǎng)格的數(shù)據(jù)流聚類算法和DPC算法的優(yōu)點融合,并在準確度和效率上加以優(yōu)化。通過仿真實驗證明,本文算法可以在雷達信號嚴重重疊并且存在干擾的電磁環(huán)境中,進行高效、準確的雷達分選。
