基于指數趨近律滑模控制DC-DC 變換器控制研究
2019-10-19 07:30:20張鵬翔陳國初俞慶
現代計算機 2019年25期
關鍵詞:設計
張鵬翔,陳國初,俞慶
(1.上海電機學院,上海201306;2.上海電氣風電設備有限公司,上海200241)
0 引言
DC-DC Boost 變換器在新能源發電、電動汽車等領域有十分廣泛的應用。由于DC-DC Boost 變換器具有特殊時變非線性的特點,控制器的設計具有較高難度。傳統線性的雙閉環PI 控制能夠滿足設計工作點周圍的穩定要求,但不能保證變換器偏離設計工作點的穩定性。滑模控制器是一種針對變結構系統為控制對象的非線性控制,與線性的雙閉環PI 控制器相比,滑模控制器對輸出負載的變化具有較好的魯棒性。滑模控制器負載變化與輸入電壓變化時擁有較好的魯棒性和響應速度。近年來,滑模變結構控制在DC-DC 變換器的應用研究成為了熱點。文獻[1]中提出了一種基于輸出電壓的PID 控制滑模變結構控制,這種方法設計簡單易于實現,但僅考慮了輸出電壓的影響,沒有考慮電流的影響。文獻[2]采用了Super-Twisting 高階滑模控制算法來控制Buck-Boost 變換器,通過將不連續控制量作用在其高階導數上,降低了一階滑模面的抖振,但設計較為復雜。文獻[6]以輸出電壓為控制量設計了Buck 變換器的模糊滑模控制,并進行了自適應控制的改進。
本文分析了Boost 電路連續導電模式的工作工程,得到其狀態空間模型。并基于此模型進行滑模控制的設計,分析滑模控制的存在性與穩定性,最后設計仿真實驗控制進行驗證。
1 Boost電路建模
Boost 變換器是一種常用的直流升壓變換器,具有典型的非線性特征。Boost 變換器在開關管導通與關斷的工作狀態如圖1 和圖2 所示。在充電過程中,開關閉合,開關處用導線代替。此時,輸入電壓流過電感。二極管防止電容對地放電。輸入為直流電,電感上的電流以一定的比率線性增加,上升比率與電感大小有關。隨著電感電流增加,電感開始儲能。放電過程中,當開關斷開時,由于電感的電流保持特性,流經電感的電流不會馬上變為0,而是緩慢的由充電完畢時的值變為0。而原來的電路已斷開,于是電感只能通過新電路放電,即電感開始給電容充電,電容兩端電壓升高。

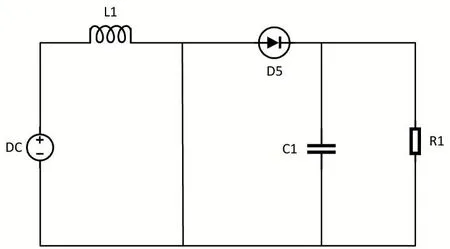
圖1 開關管導通狀態

圖2 開關管關斷狀態

則Boost 變換器在一個完整周期內的狀態空間方程為:

其中,VI為輸入電壓,VO為輸出電壓,iL為電感電流,iR為電阻電流,L 為電感值,C 為電容值,u 為開關器件的開關狀態(開關開通u=1,開關關斷u=0)。
2 滑模變結構控制器設計
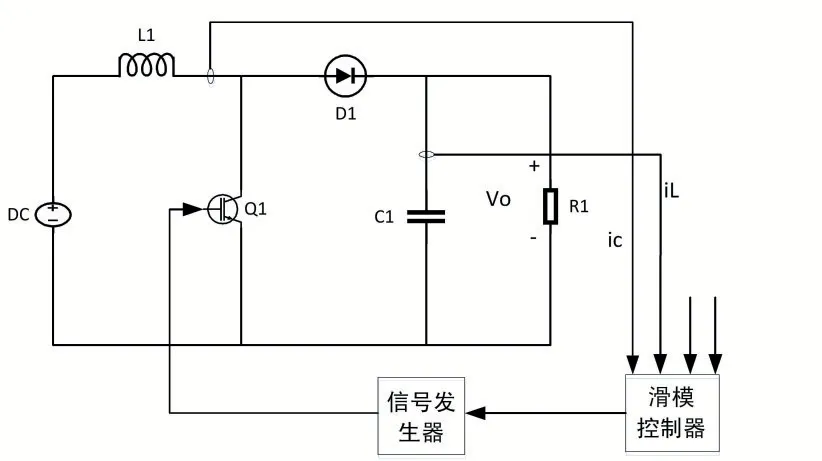
圖3 滑模控制調制形式

控制狀態變量選擇電壓誤差x1,電流誤差x2以及電流與電壓的誤差積分,表達式為:

其 中 Vref為 輸 出 電 壓 的 參 考 值 ,為電感電流的瞬時參考值,k1、k2分別為電壓誤差與電流誤差的比例值。設計以3 個狀態變量組成的滑模面:S=a1x1+a2x2+a3x3,a1、a2、a3為滑模面的滑模系數。
將Boost 變換器的狀態空間方程式(3)代入式(5)并對時間進行微分可得到電路的動態模型:
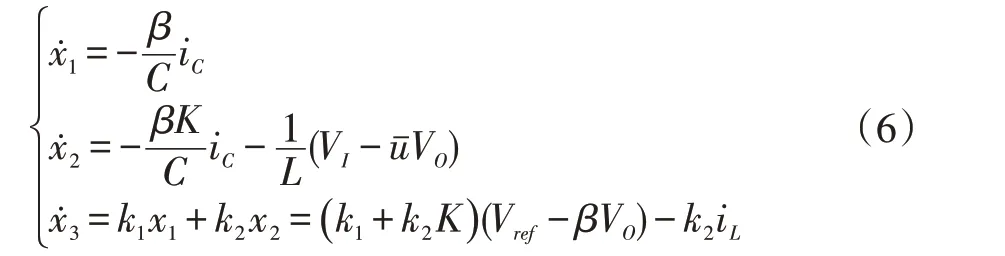
其中ū=1-u,滑模運動包含趨近運動和滑模運動兩個過程,趨近運動即系統從任意狀態向切換面的過程,由于開關器件的開關頻率有限、延時及狀態軌跡在趨近滑模面慣性的影響。為對趨近運行的運行軌跡進行改善使其快速運動到滑模面,可以引進趨近律對變換器趨近運動的動態品質進行改善,本文采用指數趨近律=-ε sgn s-ηs,減少狀態運動到切換面的趨近時間。將式(6)代入求解得到等效控制:

ueq為連續值,且在范圍0 和1 之間。同乘VO可得:

令 占 空 比 d 設 置 為 d=ueq,并 設 置,設計控制信號Vc與斜坡信號Vramp,但由于所設計方程采用的參數數值較大,不太適合直接在電路中使用,尤其在電壓等級較高的場合。因此引入比例因子g,則方程為:
3 滑模控制分析
3.1 可達性分析
可達性即為變換器狀在趨近運動過程后達到滑模面,且運動軌跡能保持在滑模面周圍較小區域內的能力,為保證可達性的要求需要滿足


可化簡為:

若變換器的工作最大值與最小值滿足存在性條件,則可以表明變換器的全部工作范圍都能滿足存在性的要求。采用輸出的預期穩態值替代VO,可以保證變換器的工作狀態在原點周圍區域內滿足存在性要求,可得存在條件為:

3.2 穩定性分析
Boost 電路的滑模控制器的運動方程是由電壓和電流的狀態變量組成,非線性程度較高且有較高的求解難度,為降低求解難度采用等效控制進行分析。將ueq帶入變換器的狀態空間方程中可得:

假設滑模面上存在平衡穩定點,且理想滑模狀態最終停留在此點,平衡點滿足
則狀態空間方程可以化簡為:

求解此方程可得:

此方程的正實數解為輸出電壓的平衡點,則系統穩定的約束條件為:
4 仿真與實驗驗證
為了驗證所設計Boost 滑模控制器的有效性與可行性,在MATLAB/Simulink 中搭建Boost 電路的仿真模型,Boost 變換器電路參數如表1 所示。

表1 Boost 變換器參數
分別采用本文所設計滑模控制與傳統PI 控制對Boost 變換器進行控制,觀察變換器在加載啟動、負載突加突減、輸入電壓變化突變的情況下,兩種控制的控制效果。
圖4 顯示了Boost 變換器在滑模控制及PI 控制下的100Ω 負載加載啟動輸出電壓的波形,滑模控制在0.01s 達到了穩定狀態,PI 控制在0.06s 達到穩定狀態,與PI 控制相比滑模控制擁有較短的穩態時間與超調量。圖5 為負載突減的輸出電壓波形,在t=0.2s 時,負載由100Ω 切換到50Ω,圖6 為電壓突變的輸出電壓波形,在t=0.2s 時,輸入電壓由500V 突變為600V 。通過輸出電壓的仿真波形上可以得出,利用本文設計的滑模控制策略控制Boost 變換器,在負載加載啟動、負載突增突減及輸出電壓波動時,輸出電壓的波動范圍均停留在穩態值較小的范圍內。而常規PID 控制器在變換器存在較大擾動影響時,出現較大的負調現象,具有較長的過渡時間,動態品質不夠理想。
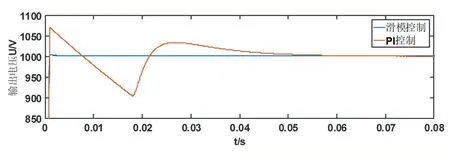
圖4 滑模控制與PI控制負載加載啟動輸出電壓波形
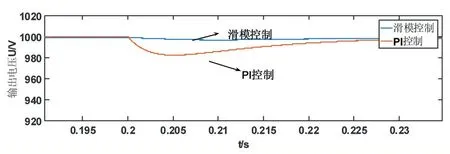
圖5 滑模控制與PI控制在負載突減輸出電壓波形
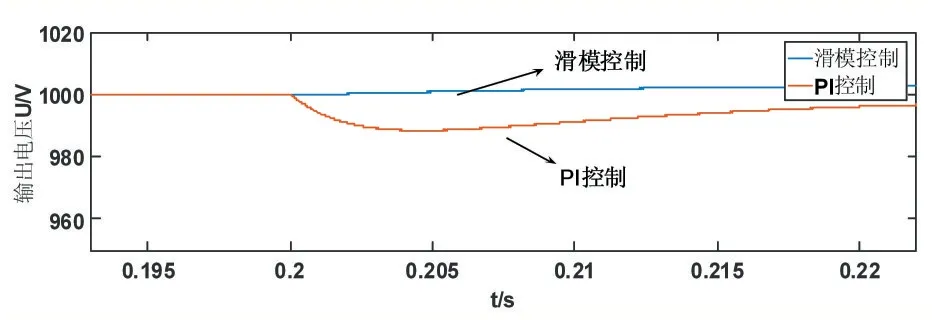
圖6 滑模控制與PI控制在電壓變化輸出電壓波形
5 結語
本文首先根據Boost 變換器在連續導電工作模式下的運行狀況得到其狀態空間模型,然后設計了以電壓誤差、電流誤差及電流電壓誤差積分和為狀態量的滑動模態面,為改善趨近運動的運動軌跡引入指數趨近律改善其趨近運動的動態性能;隨后,通過理論分析推導得到其的存在與穩定條件,最后通過仿真實驗對比滑模控制與PI 控制在負載突加突減及輸入電壓變化下的控制效果,可以得出本文采用的滑模控制相較PI 控制對系統參數變化有具有較小的過渡時間,較好的動態品質,較高的魯棒性。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04