全電驅動工程車輛故障診斷與處理策略研究
2019-10-21 15:25:35江和耀劉家勝陸銀
中國電氣工程學報 2019年19期
江和耀 劉家勝 陸銀

摘要:針對電動汽車電氣結構復雜、故障率較高的問題,為了提高電動汽車行駛的安全性,以及幫助維修人員準確找到故障點,以某型采用全電力驅動的大型工程車輛為例,設計了整車控制器的故障診斷及處理策略,采用分級式故障診斷及處理方法,設計了每個故障等級下的處理軟件算法,最后進行了仿真驗證。
關鍵詞:故障診斷,故障分級,故障處理
Abstract: The electric structure of electric vehicle is complex and the filure rate is high. Designing fault diagnosis and processing strategy(FDPT) of vehicle controller unit(VCU) can not only improve the safety of electric vehicle, but also help maintenance engineer to find fault points accurately. In this paper, a FDPT of VCU is designed for a large engineering vehicle driven by electric power. The hierarchical method of FDPT is adopted, and a software algorithm for each fault level is designed. Finally, the simulation is carried out.
Key words: Fault Diagnosis; Fault Grading; Fault Processing
1? 概述
我國電動汽車工業起步較晚,電動汽車技術處于快速發展期。電動汽車相對傳統燃油動力汽車,機械結構方面較為簡單,傳動和運動部件相對較少,但電氣結構更加復雜,故障率升高[1],但維修人員對電動汽車的認識程度低,而且電動汽車高壓危險性比較大。整車控制器故障診斷與處理可以提高客戶對電動汽車的認識,故障代碼有助于維修人員準確找到故障點,使維修切入點比較快,整車控制器對故障的分級和處理能夠提高電動汽車行駛的安全性[2-3]。
現代汽車故障診斷技術的發展趨勢主要有以下幾個方面[4]:(1)檢測設備智能化,特點是虛擬儀器與信號處理技術的廣泛使用;(2)資料數據在線化,特點是交互式電子技術手冊的使用;(3)故障診斷信息的網絡化,表現為現場診斷和遠程診斷相結合;(4)數據反饋實時化,可以把診斷過程產生的數據文件回傳到汽車生產商指定的數據庫;(5)故障診斷專家系統,特點就是在必要時呼出存儲在計算機中專家們的知識,使初學者也能得出接近專家們的判斷。
2? 分級式故障診斷及處理策略
某大型工程車輛采用全電力驅動,底盤動力總成部分主要包括柴油發電機組、驅動器、驅動電機、減速器等,整車電氣子系統較多,發生故障的點位及概率增加。柴油發電機組和各個驅動器將各自的故障信息通過CAN通信上報給整車控制器,由整車控制器進行故障診斷及處理,采用分級式故障處理策略,診斷方式及診斷操作過程如下:
(1)一級故障:該等級故障為切斷驅動器高壓故障。整車控制器接收到四個驅動器或發電機組之中任何一個子系統上傳的一級故障后,整車控制器通過控制信號的輸出關閉所有驅動器使能并切斷驅動器高壓供電。
(2)二級故障:該等級故障為請求關機故障。當整車控制器接收到四個驅動器和發電機組任何一個子系統上傳的二級故障以及整車控制器檢測到發電機組和任何一個驅動器的通訊故障后,將控制四個驅動電機無轉矩輸出,車輛將不能行駛。駕駛員或技術人員可根據具體的故障情況來選擇關機與否。
(3)三級故障:該等級故障為降功率故障。當整車控制器接收到四個驅動器或發電機組上傳的三級故障,將限制驅動電機轉矩輸出為原來的一半,從而達到限制系統功率輸出。當車輛出現該等級故障時駕駛員可繼續低速行駛,跛行返回。
分級式故障處理實現功能如圖1所示,分級式故障處理控制策略如圖2所示
3? 故障處理軟件設計
按照網絡通訊協議要求,動力系統各零部件ECU當前狀態碼及故障碼定義如表1。
3.1? 一級故障
在驅動器1(MC1)、驅動器2(MC2)、驅動器3(MC3)、驅動器4(MC4)、發動機(Engine)、發電機(Genarator)當中任何一個零部件出現一級故障,都會關閉所有驅動器使能并切斷高壓。由表1可知,ECU狀態碼中基本狀態位為101同時故障級別位為10,則該狀態為一級故障,具體處理如下所示:
3.2? 二級故障
在驅動器1(MC1)、驅動器2(MC2)、驅動器3(MC3)、驅動器4(MC4)、發動機(Engine)、發電機(Genarator)當中任何一個零部件出現二級故障或整車控制器檢測到以上任一零部件的通訊故障,都會控制電機無轉矩輸出。由表1可知,ECU狀態碼中基本狀態位為101同時故障級別位為01,則該狀態為二級故障,具體處理如下所示:
CAN通信檢測流程如下:
(1)當CAN消息觸發時,進入到流程圖,此時CAN通訊正常,并設有一變量,按MATLAB計算周期執行變量累計;
(2)當變量達到一定數值(5個周期)時進入CAN通訊故障狀態,此時將上報CAN通訊狀態為異常,直到有消息觸發后,才返回CAN通訊正常狀態,此時變量清0并且執行變量累計;
(3)若在變量處于一定數值范圍以內期間,有CAN消息觸發,將再次進入CAN通訊正常狀態,此時變量清0并且執行變量累計。
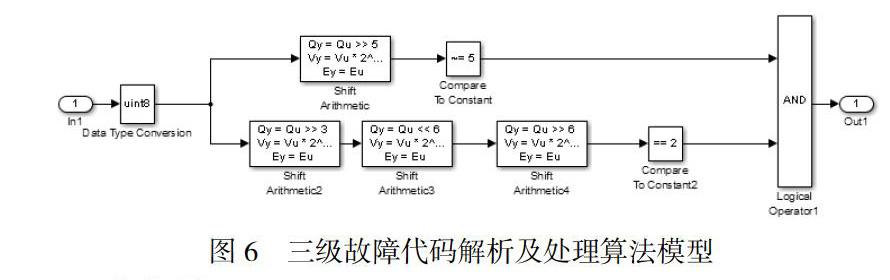
3.3? 三級故障
在驅動器1(MC1)、驅動器2(MC2)、驅動器3(MC3)、驅動器4(MC4)、發動機(Engine)、發電機(Genarator)當中任何一個零部件出現三級故障,都會限制電機轉矩輸出為原先的一半。由表1可知,ECU狀態碼中基本狀態位為非101同時故障級別位為10,則該狀態為三級故障,具體處理如下所示:
4? 仿真驗證
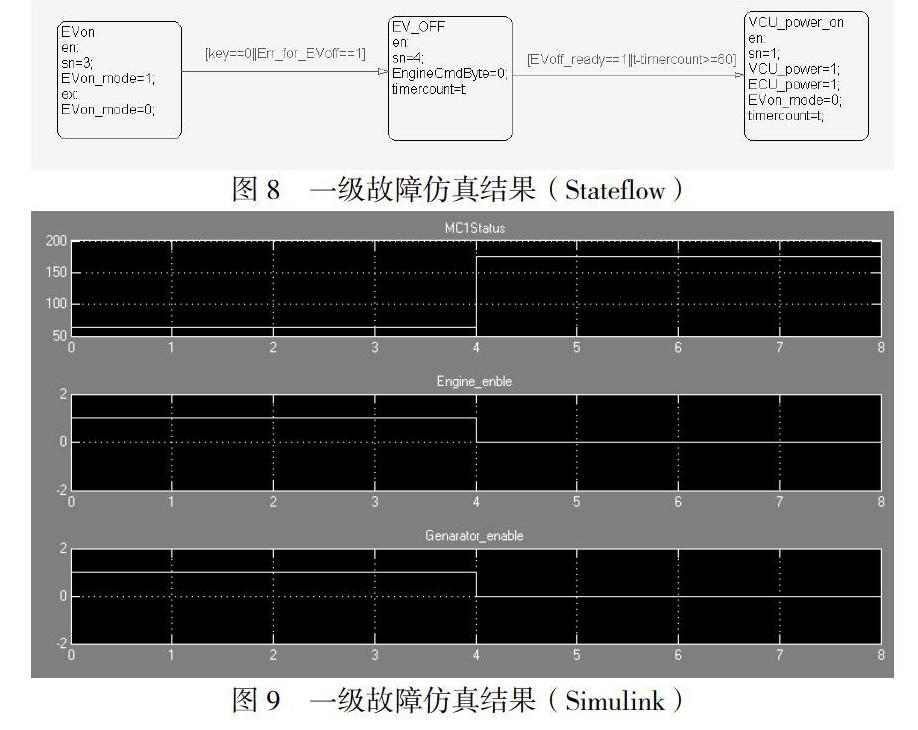
以MC1出現一級故障為例,模型仿真如圖7所示,當MC1 Status為176時,MC1定義為一級故障。
此時一級故障信號Err_for_EV_off為 1,系統會關閉發動機系統使能,切斷高壓。
圖中第一條曲線為MC1狀態碼,第二、第三條曲線分別是Engine_enable和 Genarator_enable,當MC1狀態碼為176時Engine_enable和 Genarator_enable關閉。
5? 結論
本文針對某型采用全電力驅動的大型工程車輛,設計了整車控制器的故障診斷及處理策略,采用分級式故障診斷及處理方法,將柴電機組及各個驅動器上傳的故障分為三個等級,并設計了每個故障等級下的處理軟件算法,最后進行了仿真驗證。從仿真結果可以看出,故障分級診斷與處理方法正確合理。
參考文獻:
[1] 張文強,陳晨,劉文軍,李大鵬.基于CAN總線的電動車故障診斷系統設計與實現[J].信息通信, 2018(5): 101-102.
[2] 安曉峰,尹磊,陳立建.電動汽車的故障診斷系統[J].客車技術與研究, 2016(3): 48-51.
[3] 姜明昌,戴能紅,王春芳,于海燕,孫飛.電動汽車整車控制器開發[J].汽車工程師, 2015(7): 21-23.
[4] 鮑健.汽車故障診斷技術的現狀與發展趨勢[J].工業技術, 2012(5): 110-111.
作者簡介:
江和耀,1984年生,男,漢族,2011年畢業于吉林大學,研究生學歷(碩士),中國船舶重工集團公司第七一三研究所,工程師,研究方向:自動控制,電機及驅動系統設計與仿真,分布式驅動控制算法研究。(聯系電話:13733891015)
劉家勝,1979年生,男,漢族,2004年畢業于哈爾濱工業大學,研究生學歷(碩士),中國船舶重工集團公司第七一三研究所,高級工程師,研究方向:動力與傳動。
陸銀,1987年生,女,漢族,2011年畢業于浙江大學,研究生學歷(碩士),中國船舶重工集團公司第七一三研究所,高級工程師,研究方向:結構設計及優化。
猜你喜歡
裝備制造技術(2020年3期)2020-12-25 05:22:30
博覽群書·教育(2016年9期)2016-12-12 15:48:40
中國新技術新產品(2016年22期)2016-11-29 05:41:48
中國市場(2016年41期)2016-11-28 05:34:44
北京航空航天大學學報(2016年6期)2016-11-16 01:50:43
中國科技博覽(2016年18期)2016-10-19 10:32:22
科學與財富(2016年28期)2016-10-14 02:55:41
科技視界(2016年20期)2016-09-29 12:11:09
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
