虛擬現實的履帶式裝甲車輛運動控制實驗研究
2019-10-22 06:03:56劉文學周迎春
兵器裝備工程學報 2019年9期
劉文學,王 濤,周迎春,賈 镕
(中國人民解放軍陸軍炮兵防空兵學院, 合肥 230031)
虛擬現實技術作為近些年迅速發展并逐漸成熟的一種新興技術,在三維環境建模[1]、裝備應用仿真、車輛模擬駕駛[2]等諸多領域都有著廣泛的研究和應用。其較好的實時性、沉浸性和交互性尤其適合車輛模擬駕駛的應用,諸多專家學者都對此進行了相關研究。羅元等[3]在城區公路實現了不同交通情況下的汽車智能化運動仿真,重點實現了虛擬現實交通流的模擬。王文峰、羅竹輝[4-5]等考慮車輛動力學設計了汽車模擬駕駛系統,較好地渲染了三維虛擬場景,實現了車輛較為逼真準確的駕駛運動仿真,滿足了交互性、實時性的要求。冀杰等[6]建立了以車輛縱橫向運動跟蹤誤差為變量的車輛模型,借助仿真試驗平臺對汽車跟隨系統的路徑跟蹤能力進行了驗證,并比較了駕駛操作與車輛跟隨系統作用下的動態響應特性差異,結果證明該仿真試驗平臺具備較高的可靠性,另外,模擬駕駛系統也被開發應用于駕駛員的培訓,模擬實際駕駛操縱[7-8]。在國外,A.M.Sharaf和X.Yan同樣研發出了類似的基于車輛模型的模擬駕駛系統[9-10],重點整合了駕駛員的操控動作,驗證了模擬駕駛器在典型工況下的魯棒性和保真度表現。
自主行駛技術是當今世界各主要軍事強國無人化軍事裝備研發的核心技術,其中的運動控制技術是其關鍵組成部分,處在連接上層路徑規劃和下層執行系統的關鍵位置,對車輛自主運動的實現具有重要意義。但由于實車試驗存在耗資大、周期長的局限性,先期利用計算機進行虛擬場景下的車輛運動仿真成為研究熱點,而當下模擬駕駛的研究大多針對民用汽車進行,軍事應用背景下的履帶式裝甲車輛研究較少,且多為研究獨立式電機驅動履帶車輛[11-12],對采用二級行星轉向機的履帶式裝甲車輛的運動控制研究相對較少。
針對上述問題,筆者提出了虛擬現實的履帶式裝甲車輛運動控制仿真方法。本文首先簡述了虛擬仿真系統的支持軟件和仿真結構,然后以某型履帶式裝甲車輛為研究對象,建立車輛的滑動運動模型,結合駕駛操縱規律和預瞄-跟隨理論,設計車輛跟隨折線型軌跡的運動控制方法,在三維虛擬仿真實驗中,以駕駛員操縱轉向拉桿、兩側履帶處主動輪轉速等相關參數為輸入,以車體的速度、角速度為輸出,實現履帶式裝甲車輛在低速工況下的運動控制。
1 虛擬仿真系統結構
Creator/Vega Prime具備出色的三維實體建模與視景仿真能力,已成為虛擬現實技術應用最為廣泛的工具之一。其中,Creator集成了強大便捷的矢量編輯、交互式建模與裝配以及地形地貌生成等多種功能,提供了一個“所見即所得”的視景仿真建模環境[13]。基于VSG的Vega Prime具有突出的面向對象能力,功能模塊化特征明顯,程序設置靈活。設計履帶式裝甲車輛的運動控制仿真結構如圖1所示。
履帶式裝甲車輛屬于對外部操作型實體,其模型的建立首先要獲取車輛的外部特征尺寸及相關的紋理數據,同時運用LOD技術,遠近距離不同LOD模型的精度不同,細節的展現程度也不同。地形建模則利用Creator提供的插件模塊處理高程數據文件,將其轉換成可用的DED格式文件,最終形成flt格式的地形道路和障礙模型文件。實體建模完成后,利用Vega Prime進行視景仿真驅動,借助模型的API接口,用戶能夠以編程的方式讀、寫和建立flt文件。運行程序的工作流程為:初始化vp模塊;定義配置文件;配置所要用到的資源;幀循環;關閉vp模塊。初始化和關閉方法定義在namespace中,定義、配置、幀循環以及其他的運行時控制方法都定義在vpKernel類中[14],虛擬現實系統視景程序如圖2所示。為增強車輛運動的沉浸感,加入音效、車轍等渲染效果,并進行實體模型間的碰撞檢測設計。

圖1 履帶式裝甲車輛運動控制仿真結構框圖
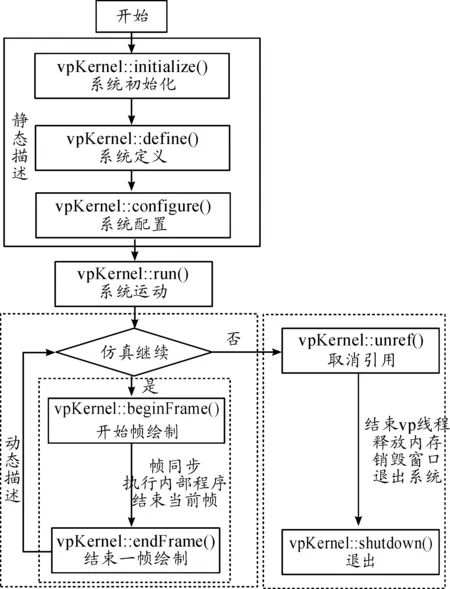
圖2 虛擬現實系統視景程序框圖
2 履帶式裝甲車輛運動控制建模
2.1 車輛滑動模型
履帶行走裝置的車輛與輪式車輛轉向機理不同,其是基于兩側履帶速度差的差速轉向。車輛由直線行駛變換成轉向行駛時,內側履帶的環繞速度降低,外側履帶的環繞速度保持不變,在兩側下支履帶與地面相互作用下實現轉向,相互作用表現為強烈的摩擦與滑動。本節從平面運動角度出發分析低速工況下履帶式裝甲車輛的轉向運動,認為車輛在幾何上關于其橫縱向平面對稱,且質心與車體的幾何中心重合;車輛在水平地面上作均勻穩態轉向;低速轉向時離心力作用較小,可忽略。

(1)

圖3 履帶式裝甲車輛滑動模型示意圖
履帶式裝甲車輛兩側履帶處主動輪的驅動力大小不同,其環繞速度不同,同時兩側履帶的滑動速度Δv也不同。認為車輛轉向時內外側履帶處的主動輪角速度分別為ω1、ω2,主動輪節圓半徑為rz,則車輛轉向過程中兩側履帶滑移/滑轉率可表示為
(2)
車輛的理想轉向半徑為

(3)
考慮兩側履帶的滑動,則車輛實際轉向半徑為
(4)

2.2 車輛運動控制模型
某型履帶式裝甲車輛采用二級行星轉向機實現差速轉向,此類車輛與當下研究較熱的獨立式電機驅動履帶車輛的轉向有較大不同,由于其內部單功率流機械傳動裝置性能的限制,低速工況下利用轉向機第一、二位置只能實現部分有級轉向,因而對車輛進行運動控制時無法跟隨曲率連續變化的平滑曲線軌跡,而獨立式電機驅動履帶車輛理論上通過兩側電機的協同控制能夠跟隨各種軌跡。結合此類車輛的操縱規律與駕駛經驗,可知其低速工況下轉向運動實現主要依靠局部航向調整與直線行駛的協調配合,最終形成直線與弧線間隔連接的運動軌跡。在預瞄-跟隨理論基礎上,提出針對此類履帶式裝甲車輛低速工況下跟隨折線型軌跡的運動控制新方法,預瞄點的選取是其中重要環節,此處不再采用常規遍歷路徑點選擇預瞄點的方法,而是結合此類車輛運動特性選擇折線軌跡中的轉折點作為預瞄點,轉折點坐標設為(Xd,Yd,θd)。
如圖4所示,車輛跟隨折線期望軌跡(折線部分),點A、B、C分別為3個依次的預瞄點,θ為車輛航向角,β為車輛實時航向與實時位置—預瞄點連線間夾角,此處定義為航偏角,轉折點附近不同半徑的圓代表轉向機第一、二位置轉向半徑大小,d為到達預瞄點前的制動轉向距離,不規則區域代表障礙區域。

圖4 履帶式裝甲車輛軌跡跟隨示意圖
根據轉向半徑所在圓與期望軌跡相切,可得
(5)
車輛軌跡跟隨位姿誤差E描述為

(6)
式(6)中:α為期望軌跡轉折點拐角,B為車輛履帶中心距。
車輛軌跡跟隨的運動控制問題可描述為在一定兩側履帶處主動輪轉速條件下,合理選擇制動轉向時機與制動轉向時長,使得車輛運動軌跡與期望軌跡擬合,位姿誤差E不斷減小,收斂于預瞄點附近。結合車輛操縱規律與駕駛經驗,選擇航偏角的余弦作為車輛運動控制的目標函數,即

(7)
車輛轉向工況與直駛工況的模式切換條件為
(8)
3 運動控制仿真實例
為驗證上文提出的履帶式裝甲車輛運動控制方法,設計折線型期望軌跡實現車輛軌跡跟隨運動,由于本節重在檢驗控制方法的有效性,滑轉/移率較難測得且兩側履帶的環繞轉速易得,所以當車輛在某一路面條件下以某一速度和轉向半徑運動時,常采取將滑移/滑轉率假定為一定值的方式[15]。最終車輛單一位置轉向軌跡跟隨仿真結果如圖5所示,上面為車輛運動軌跡圖,下面為車輛橫向位置誤差。

圖5 履帶式裝甲車輛單一位置轉向軌跡跟隨仿真結果
從圖5中明顯看出:車輛跟隨折線型軌跡運動時,較大橫向位置誤差均出現在預瞄點附近,尤其是拐角為銳角的預瞄點在轉向機第一位置轉向時誤差達到4.5 m,預瞄點間的過渡階段誤差較小,維持在1.5 m以內,轉向機第二位置轉向時橫向位置誤差均較小,但由于此種轉向對車輛內部機件磨損傷害較大,不宜常規化使用。4.5 m橫向位置誤差的出現并不代表此控制方法無效,這是因為固定轉向半徑轉向時受車輛自身物理模型的限制,某些軌跡車輛根本無法實現準確跟隨,這正對路徑規劃提出相應要求,應盡量減少甚至消除折線型軌跡中的銳角拐點,使得期望軌跡趨于平順,或是在必須大轉角轉向運動時,轉折點與障礙物間要設置足夠長的距離,保證車輛能夠順利躲避障礙物,這完全符合駕駛員的駕駛經驗。
為進一步解決轉向機單一位置轉向時存在的弊端,設置車輛轉向模式自切換條件:

(9)
式(9)中:1為轉向機第一位置,2為轉向機第二位置。
車輛組合位置轉向軌跡跟隨結果如圖6所示,可知車輛整體軌跡跟隨效果改善,橫向位置誤差維持在1.5 m的容錯范圍內。

圖6 履帶式裝甲車輛組合位置轉向軌跡跟隨仿真結果
運用此種運動控制方法,設置“工”字型障礙桿排列,在虛擬場景中進行履帶式裝甲車輛的視景驅動運動實驗,視野中車輛能夠依次成功躲避障礙桿,到達預期目標位置,調整障礙桿的擺放位置與相互間距離,能夠為駕駛員的駕駛培訓方法的改進提供參考,車輛自主繞桿運動過程如圖7所示。

圖7 履帶式裝甲車輛繞桿運動過程示意圖
4 結論
本文建立了車輛的滑動運動模型,得到實際轉向半徑會有增大,將滑動參數作為控制輸入,結合駕駛員操縱規律與駕駛經驗,設計基于預瞄—跟隨理論的履帶式裝甲車輛跟隨折線軌跡的運動控制方法,利用Creator與Vega Prime聯合實現了虛擬場景下的履帶式裝甲車輛運動控制仿真實驗,辨識軌跡設計轉向模式自切換策略,仿真結果表明履帶式裝甲車輛通過一定的運動控制方法成功躲避障礙物,到達預期目標位置。虛擬場景中加入音效、車轍等渲染效果,滿足虛擬仿真系統沉浸感和實時性要求,對履帶式裝甲車輛的駕駛員駕駛培訓具有指導價值。
