基于CFAR算法的極化SAR圖像飛機目標檢測
2019-10-22 07:02:44
福建質量管理 2019年19期
(沈陽航空航天大學 遼寧 沈陽 110000)
引言
目前為止,在致力于發展高速、高精度以及良好可操作性的極化 SAR 圖像的飛機目標檢測算法檢測方面,研究者們做了大量的工作,涌現出很多的SAR目標檢測算法。如在利用圖像強度特征方面,比較著名的如:Novak提出的局部雙參數cFAR檢測方法,該方法簡單有效,被廣泛應用,但該方法缺點也非常明顯。恒虛警檢測算法(CFAR)是當前主要的飛機目標檢測方法[1,2],本文針對大場景復雜背景下對檢測精度和時間的要求,研究了基于目標先驗知識的二次 CFAR 的檢測算法。
一、cfar算法原理與算法模型
根據的計算方式的不同,CFAR檢測器分為均值(ML)類和有序統計量(OS)類兩種典型的檢測器,本文主要使用ML類CFAR。
ML類CFAR:

(2-1)
(2-2)
(2-3)
式中,xi為為各單元的參考信號幅度;L位前沿和后沿參考滑窗長度。
各種雷達系統中用得最多的CFAR檢測方法就是CA檢測算法。CA在均勻雜波背景中的檢測性能最好,但在非均勻背景中性能嚴重下降.
二、基于改進的 CFAR的SAR圖像檢測
在本文中,為了既滿足檢測精度又滿足檢測時間,考慮將全局 CFAR 和滑窗 CFAR 相結合,將這種方法稱為二次 CFAR 檢測算法.其主要流程為:
1.對每塊圖像,設定一個較高的虛警率進行閾值計算,并進行二值化。在這個步驟中,要保證每個目標都能夠盡可能的被檢測出來,因此設定的虛警率較高。在每個圖像塊中,使用同一個閾值進行二值化。
2.對整幅圖像進行聚類。
3.統計每個連通區域的位置信息。在這步中,對每個連通的區域,統計其在在圖像上的最大外接矩形,由于在步驟 1)中使用的虛警率較高,因此這個邊界比實際的目標的邊界要大。
4.對每個目標,根據目標的邊界信息,設定滑窗的尺寸。以每個區域的最大外接矩形作為保護區窗口的大小。在保護區外,設定一定大小的雜波統計區(距保護區為 5 個像素)。
5.對每個區域進行二值化。對每個目標區域,根據雜波模型和虛警率計算閾值 T,并進行二值化。
三、實驗結果分析
本實驗采用 UAVSAR 系統在美國 Gulf Coast 地區上空采集的新奧爾良市某機場場景數據。
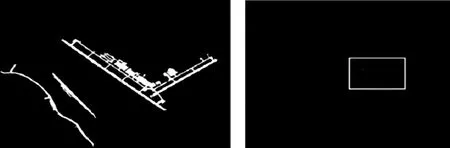
(a)跑道區域檢測結果 (b)飛機目標檢測結果
圖1 中,圖(a)為算法得到的跑道區域二值標簽圖,圖(b)為本小節算法得到的飛機目標檢測結果。5 架飛機(黃色圓圈)均被檢測出,且只存在 2 個虛警(藍色圓圈)。實驗結果驗證了本小節算法的有效性。
四、結論
此算法均能準確有效地檢測出真實跑道,無虛警區域,且檢測出的跑道結構完整、細節信息都保持良好;能快速準確地檢測出跑道區域,實時性更好;同樣本節算法采用無監督分類方法提取疑似跑道區域,沒有用到樣本信息,說明本節算法實用性更廣。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電測與儀表(2015年5期)2015-04-09 11:30:52