基于S TM 32的W iFi智能小車控制系統設計
2019-10-23 07:29:00周東瑤師文慶王楚虹
裝備制造技術 2019年8期
周東瑤,師文慶*,黃 江,王楚虹
(廣東海洋大學電子與信息工程學院,廣東 湛江524088)
0 引言
現在智能機器人技術極速發展,并廣泛應用于各個行業之中,尤其是多功能智能車成為了主流趨勢,也是自動控制領域中的一個研究熱點。智能車作為智能車輛的載體,是集傳感器技術、人工智能技術、自動控制技術、車輛工程控制于一體的綜合技術,是未來的智能汽車發展模型[1]。無線控制智能車可應用于國防、航空航天、工業以及一些服務型行業中,如應用于國防中的無人駕駛戰車,應用于災害處理、工業上危險地區的數據采樣和故障處理等。同時隨著我國現代人工作、生活節奏的加快和人口老齡化加劇,人們更加需要智能車的協助,可以提高勞動生產效率[2]。
2002年,我國科技部正式啟動了“十五”科技攻關計劃重大項目——智能交通系統關鍵技術開發和示范工程,這其中的一個重要內容就是進行車輛安全和輔助駕駛的研究。對機電一體化人才的培養也越來越重視,主要體現在面向大學生的各種大型創新創業訓練項目的比賽上,如全國大學生“恩智浦”杯智能汽車競賽等,鑒此,設計一種基于STM32的WiFi智能小車。
1 系統方案概述
系統是一個基于STM32的,由WIFI無線傳輸模塊、超聲波避障模塊、尋跡模塊、驅動模塊、溫濕度檢測模塊等組成的。整個系統需要一個相對穩定的符合需求的架構,STM32核心控制器通過對各個模塊的控制來完成各項功能。控制器發送開始信號給溫濕度檢測模塊,使其檢測溫濕度,并將數據傳回控制器,并將這些數據通過WiFi無線傳輸模塊顯示到上位機中;通過控制器對舵機、超聲波避障模塊、尋跡模塊的控制,接收其返回的信息完成避障、尋跡的功能;通過上位機的控制信號對STM32控制器進行操控實現對小車的控制[3]。設計總框圖如圖1所示。
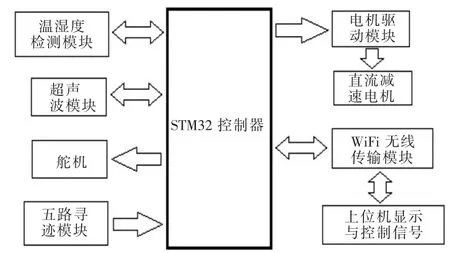
圖1 設計總框圖
2 硬件實現
硬件部分由主控芯片、電源、電機驅動、WiFi模塊、自動尋跡模塊、溫濕度傳感器等部分組成。首先,需要一個芯片來完成小車的控制,小車運動則需要電源以及電機驅動,本設計的小車功能中,遙控功能需要用到WiFi模塊;自動尋跡通過五路尋跡模塊來實現;避障功能通過超聲波模塊以及舵機配合來實現;環境的溫濕度通過溫濕度傳感器采集數據。具體各部分敘述如下。
2.1 最小系統模塊
最小系統模塊是采用STM32F407VET6最小系統板,板上有充足的資源供給智能小車使用,最小系統控制整個系統,經測試穩定可靠。
2.2 電源穩壓模塊
供電穩定是小車正常運行的基礎,只有供電穩定才能有穩定的系統,所以必須要有個合格的電源模塊,本設計使用四塊3.7V的鋰電池,經過兩個XL4015E1降壓穩壓模塊的降壓至不同電壓對不同模塊供電。一個降至12V并保持穩定之后為小車電機進行供電,另一個降至5V為最小系統供電。
2.3 驅動模塊
本設計采用的是小車底盤自帶的強磁直條雙軸減速電機,比速可達1∶48,并采用L298N電機驅動模塊,其內部有兩個完整的H橋高電壓和較大電流全橋式的驅動器,一個全橋就可以保證一個直流電機的正反轉,其接收的是標準的TTL邏輯電平信號,可以驅動46V 2A以下的電機。
2.4 尋跡模塊
本設計采用了五路黑白線尋跡模塊,即由六對紅外對管構成,五對用于尋跡,一對用于避障,每對發射管會發出一定頻率的紅外射線,若遇到可反射光的物體,紅外射線就會反射回來被接收管吸收,輸出高電平,當測到黑線時,則無法反射,該對管對應的管腳輸出低電平。
2.5 超聲波避障模塊
本設計選用了HC-SR04超聲波模塊,采用IO口TRIG觸發測距,給模塊發送一個最少10μs的高電平信號,模塊就會自動發送8個40 kHz的方波并檢測是否有信號返回。若有信號返回,則通過設定成ECHO的IO口輸出一個高電平,高電平持續的時間就是超聲波從發射到返回的時間。所以,測試距離=(高電平時間*聲速)/2,由于超聲波檢測范圍有限,所以加裝了一個舵機模塊,通過舵機帶動超聲波模塊旋轉到不同角度,然后檢測不同角度的前方是否存在障礙物,能使超聲波測量范圍加大,更好地實現避障功能。
此模塊提供2 cm~400 cm的非接觸式距離感測功能,測距精度高達3 mm;模塊包括超聲波發射器、接收器與控制電路。
2.6 溫濕度檢測模塊
本設計使用了DHT11溫濕度檢測模塊,DHT11數字溫濕度傳感器是一款含有已校準數字信號輸出的溫濕度的復合傳感器。它采用專用的溫濕度傳感技術和數字模塊采集技術,以確保產品具有極高的可靠性與長期穩定性。
2.7 WIFI無線通信模塊
本設計選用了ESP-01SWiFi模塊,該模塊采用的核心處理器ESP8266。雖然尺寸小,但是封裝集成了業界領先的Tensilica L106超低功耗32位微型MCU,帶有16位精簡模式,主頻可支持80 MHz和160 MHz兩種[5],并集成了 Wi-Fi MAC/BB/RF/PA/LNA,此模塊支持標準的IEEE802.11 b/g/n協議,TCP/IP協議棧,可使用此模塊為現有的設備添加聯網功能,也可構建獨立的網絡控制器[6-7]。
3 軟件實現
本設計包括多個子模塊,需要設計子函數的模塊有:超聲波測距模塊、尋跡模塊、驅動模塊、傳輸模塊、舵機模塊和溫濕度檢測模塊等。主函數中通過標志位的數值進入相對應的模式子函數中,默認為手動遙控模式子函數,每個模式下,都會判斷是否到達中斷定時時間,進入中斷時運行溫濕度采集函數,以實時在上位機顯示小車周圍環境的溫濕度。程序總框圖如下圖2所示。
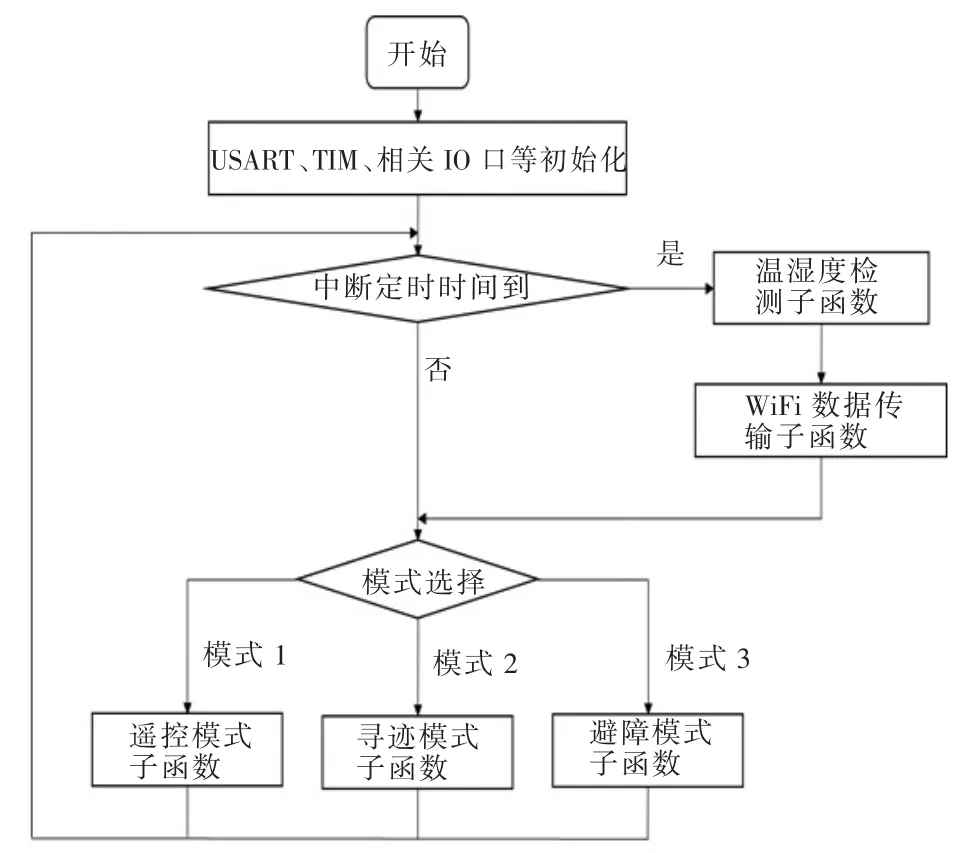
圖2 主函數流程框圖
3.1 電機控制程序
本設計用L298N驅動芯片來驅動直流減速電機,其中通過控制四個IO口輸出的值來分別控制兩個電機的正反轉,初始化一個定時器用來輸出不同占空比的PWM波來控制電機轉速,就能很好地控制電機的轉速和正反轉。本設計設置STM32芯片的PB6、PB7、PB8、PB9 管腳分別為 L298N 芯片的 IN1、IN2、IN3、IN4,當 PB6 和 PB8為 1,PB7和 PB9 為 0時,兩個電機正轉;反之為反轉。接下來使用定時器4使PB6、PB7、PB8、PB9輸出不同PWM,來控制電機的轉速,通過上述步驟,就能控制電機的轉速及旋轉方向了。用定時器4輸出PWM控制電機程序流程圖如圖3所示。
3.2 尋跡程序
選用的BFD-1000五路黑白線尋跡模每對紅外對管都對應著一個GPIO口,用來檢測返回的信號,根據返回的信號來判斷是否沿著制定好的黑色路線行進,若偏離了,則調節PWM波來控制電機左右輪的轉速以達到調節方向的作用。紅外管初始化和檢測程序如圖4所示。
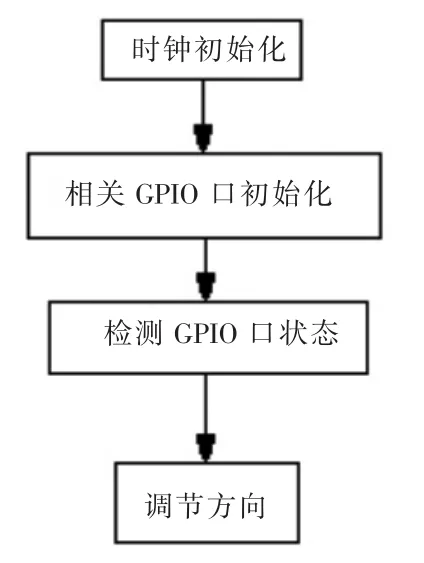
圖4 尋跡函數流程框圖
3.3 超聲波避障程序
通過一個舵機和一個超聲波模塊組合起來實現超聲波避障功能,所以需要兩個模塊的配合完成,如果前方有障礙物,舵機將帶動超聲波模塊分別轉角到不同方向,然后再次啟動超聲波測距,然后選擇繼續前進的方向。控制舵機需要使用定時器輸出PWM波產生不同占空比來控制舵機的轉角度數。
而超聲波模塊工作需要兩個IO口,一個輸出觸發信號TRIG,另一個輸入回響信號ECHO,此處將PE5、PE6分別設置為ECHO和TRIG,PE6輸出一個高電平時,超聲波模塊會發送八個40 kHz的方波,隨后超聲波模塊會馬上檢測系統有沒有返回的信號,若接收到返回的高電平信號,則通過ECHO傳回STM32芯片做處理,即PE5高電平保持的時間就是超聲波信號發出到返回所用的時間,使用此時間乘以聲速再除以二則為小車與前方障礙物的距離[8-9]。本設計采用定時器5來計數。流程框圖如圖5所示。
圖5 距離檢測函數流程框圖
3.4 溫濕度檢測程序
當STM32芯片向模塊此發出開始信號后,DHT11從低功耗模式轉換為高速模式,當開始信號結束后立馬發送響應信號和數據,并觸發一次信號采集,隨后轉換到低功耗模式,若無開始信號,DHT11不會主動進行溫濕度采集,本設計設置PE0來發送以及接受此模塊的信號,通過處理PE0所接受到的數據轉換為溫濕度。程序流程框圖如上圖6所示。
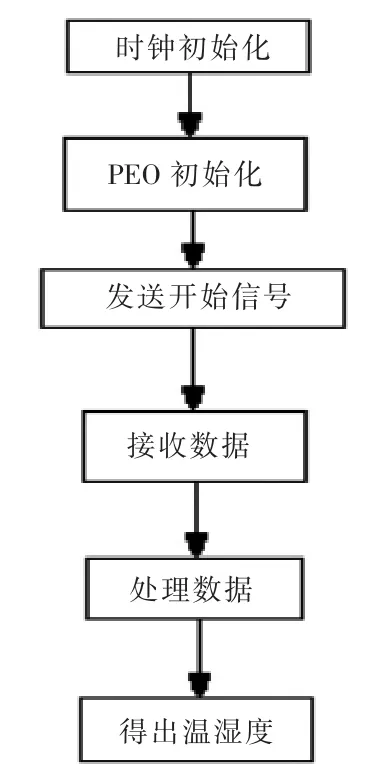
圖6 溫濕度檢測函數流程框圖
3.5 WiFi數據傳輸程序
采用的ESP-01s串口WiFi模塊需要將開發板的串口配置好,然后給WiFi發送指令以配置WiFi的名稱、密碼、模式等,之后才能正常地使用WiFi模塊,使用串口中斷來接收或發送數據,才不會影響其他模式的運行。流程框圖如圖7所示。
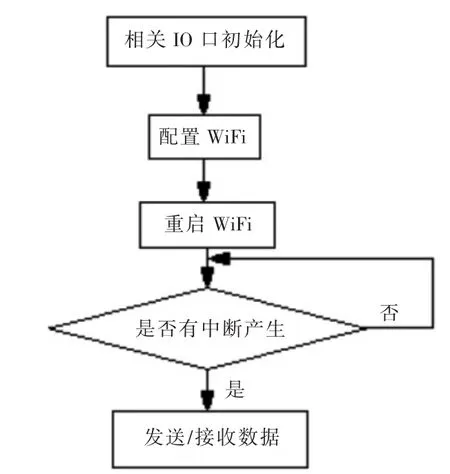
圖7 WiFi數據傳輸流程框圖
4 測試實驗
小車默認是手動遙控模式,即可通過上位機對小車發送指令進行遙控,使小車完成前、進后退等各項動作,可任意切換到自動尋跡模式或者避障模式中,每個模式運行中都可以隨時通過上位機來切換模式;在自動尋跡模式中,小車可以通過紅外對管檢測地面上的黑色線路自行調整方向以沿著黑線前進;在避障模式中,小車會根據超聲波模塊和舵機配合檢測前方不同方向是否存在障礙物來選擇最佳的前進方向;在每個模式中都會使用定時中斷來檢測溫濕度,并將WiFi模塊將數據傳輸至上位機顯示。小車成品如圖8所示,上位機顯示如圖9所示。
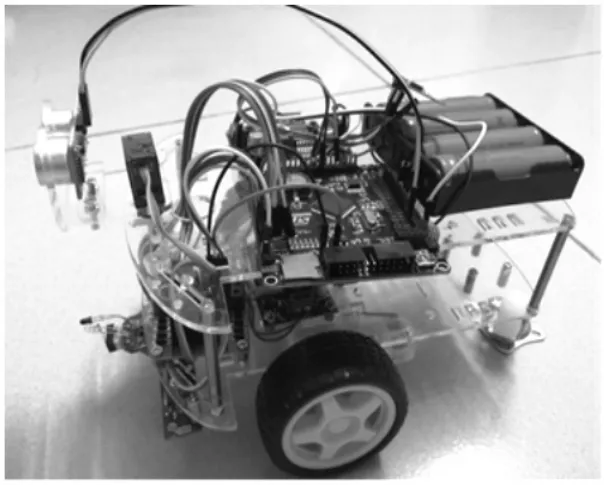
圖8 小車成品圖
圖9 上位機顯示圖
在手動控制模式下,小車能夠迅速接收到上位機的發送的前進、后退、旋轉、切換模式等指令并準確的完成指令;在空地中設計出一條有若干障礙物的路線,自動避障模式中,小車能夠迅速檢測到障礙物并調節到最合適的方向進行前進;在空地上設計出一條2 cm寬的黑色路線,在自動尋跡模式下,小車能夠很準確的沿著黑線行進;上位機上也能夠實時顯示小車周邊環境的溫室度數據。
5 結束語
本設計是基于STM32F407VET6芯片的一款WiFi智能小車,與其他智能小車相比,其可開發度很高,可以增加更多的模塊來完成更多的功能,本設計僅做了幾個功能,本設計一共有三種模式,默認是手動遙控模式,通過上位機對小車發送指令進行遙控,可任意切換到自動尋跡模式或者避障模式中,在每個模式中都會定時檢測溫濕度,并將數據傳輸至上位機顯示,而且每個模式中都可以隨時通過上位機來切換模式。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
海峽科技與產業(2016年3期)2016-05-17 04:32:12
