基于自適應逆控制的儲能舵機技術研究
2019-10-24 08:14:52王厚浩蘇偉杰唐德佳
上海航天 2019年4期
王厚浩,陳 輝,蘇偉杰,唐德佳,何 洋
(上海航天控制技術研究所,上海 200233)
0 引言
目前,旋轉彈均采用單通道控制,但單通道控制的效率較低,控制精度較差,機動能力十分有限[1]。為了有效攔截高速、高機動低空目標,新一代旋轉彈必須具有大過載、大機動等特點,因此對電動舵機提出了更高的要求。儲能舵機在常規電動舵機舵面和舵軸間采用扭簧連接,可以極大地減小電機的功率需求[2]。由于儲能機構的引入改變了舵機系統的特性,同時系統對指令干擾的響應更加敏感,容易造成儲能舵機消耗的能量增大[3]。因此,對儲能舵機的特性分析以及控制策略的研究具有重要意義。
電動舵機控制方法主要有經典比例-積分-微分控制(PID 控制)、智能控制、魯棒控制以及非線性控制等。經典PID 控制算法簡單緊湊,實時性好,易于實現,在電動舵機控制器中應用廣泛。張元等[4]針對傳統控制器響應速度慢、系統參數不易整定、多變量非線性復雜系統存在的時滯問題等,設計了一種改進的模糊神經網絡PID 控制器,為電動舵機控制系統快速性、高精度的設計提供了依據。LU等[5]為解決電動舵機負載擾動以及機械結構自身變形等因素帶來的不利影響,開展了H∞控制與復合型H∞控制,通過實驗對比了不同控制方法的控制效果,實驗結果表明復合型H∞控制的魯棒性較好。劉曉東等[6]提出了一種自適應滑模控制方法,對電動舵機工作過程中的參數變化以及外界干擾等不確定因素進行控制,具有良好的效果。WIDROW 在1986年基于信號處理提出了自適應逆控制理論[7],其基本思想是采用自適應濾波方法辨識出被控對象的逆模型,并將此逆模型作為控制器對被控對象進行開環控制。斯坦福大學斯坦福直線加速器中心(SLAC)在電子束控制中的自適應噪聲消除系統中成功應用了自適應逆控制[7]。此外,自適應逆控制方法還被應用在機器人控制、感應電機調速、震動檢測、飛機引擎、控制功率摩托車等領域中[7-10]。總的來說,電動舵機控制器的算法每一種都有其優點和針對性,需要根據對象特性選擇合適的控制算法。
目前,國內未見儲能舵機技術相關研究資料,國外SIRIMARCO 和VAN ZEE 等[2]僅分析了儲能舵機的功耗優勢。本文依據電動舵機運動學方程,對比分析儲能舵機與普通電動舵機的需求電流,結果表明儲能舵機耗能更少。在此基礎上,考慮增加扭簧導致對象特性變化,本文分析了相同輸入條件下,儲能舵機與普通電動舵機的輸出差異,從而給出儲能舵機的輸入修正方程,方程中輸入指令的修正值與舵偏角速度有關,因此需進行實時修正。
自適應逆控制可使輸出完全跟隨輸入,因此采用自適應逆控制策略可以有效地抑制對象特性變化和指令干擾的影響。本文基于自適應逆控制,并結合旋轉彈的指令信息特征,辨識電動舵機控制系統逆模型,降低了算法的復雜度。仿真及試驗結果表明,基于自適應逆控制的旋轉彈儲能舵機無需修正指令即可獲得與普通電動舵機相媲美的輸出性能,具有很好的跟蹤效果,有效地消除了對象特性改變對舵機性能影響。
1 儲能舵機系統建模
電動舵機主要由伺服電機、控制器、減速裝置、反饋測量元件等組成,電動舵機組成框圖如圖1所示。

圖1 電動舵機組成框圖Fig.1 Electromechanical actuator composition block diagram
儲能舵機是在傳統電動舵機基礎上改進形成的,即在舵面和舵軸間增加儲能彈簧,以降低舵機功耗,如圖2所示。
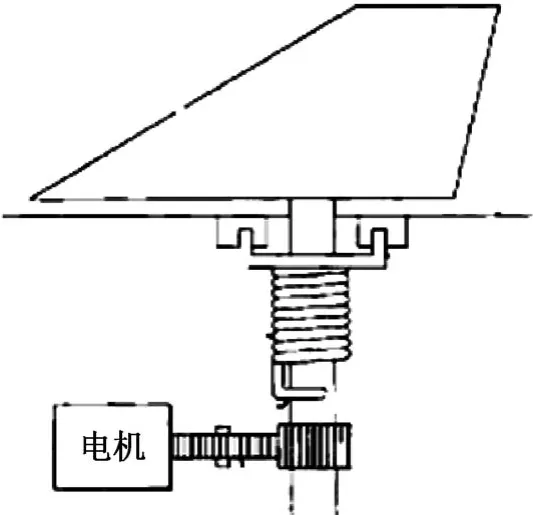
圖2 扭簧儲能舵機局部Fig.2 Part of torsional spring energy-storage actuator
儲能彈簧使得電機驅動舵面在某一方向偏轉并存儲能量,用以驅動舵面反方向運轉,理論上可實現舵面以固有頻率反復不斷偏轉,從而節省能量。合理選擇彈簧可以使得系統固有頻率和彈旋頻率相匹配,剛度系數Ks可以在系統固有頻率到額定工作頻率之間選取[6]。
電動舵機系統中人為引入限流環節,相當于飽和非線性。儲能舵機控制系統的模型框圖如圖3所示,表明了系統輸入R(s)到舵偏角δ(s)的過程。圖中:Te為電磁轉矩;ω 為電機機械角速度;Kt為電機力矩系數;Jm為電機轉子轉動慣量;Ud為直流母線電壓;Ra為繞組線電阻;La為繞組等效線電感;Ke為反電勢系數;Kf為摩擦系數;Ks為儲能彈簧的剛度系數;Kem為機電轉換系數;e為舵偏角偏差;K為控制器增益;Ua為控制電壓;Ea為反電勢;I為母線電流;N為傳動比;δ為舵偏角。
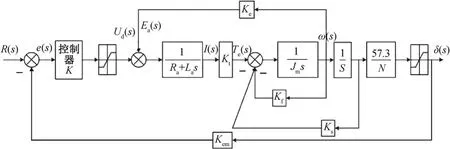
圖3 儲能舵機系統模型框圖Fig.3 Block diagram of Energy-storage actuator system model
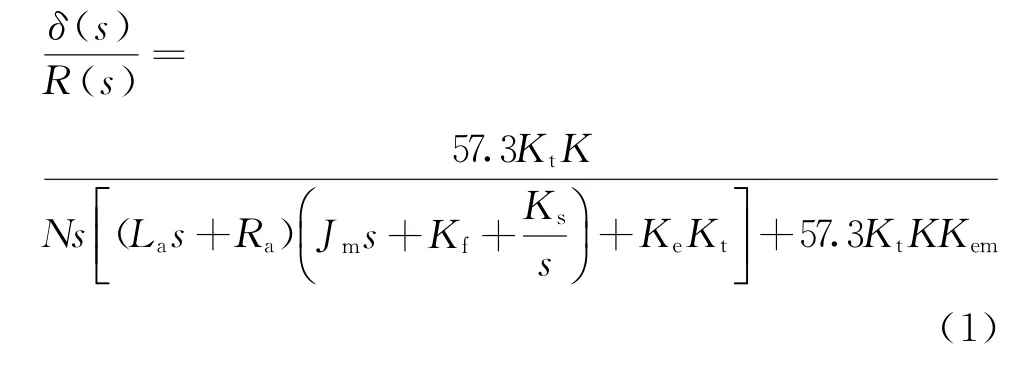
當負載為0時,儲能舵機傳遞函數表示為
2 儲能舵機系統分析
2.1 儲能舵機節能分析
舵機舵偏角δ的運動方程為

式中:δa為舵機運動的最大舵偏角;ωc為舵機運動的角頻率;t為運行時間。由舵機傳動比N可知,折算到電機軸上的角度θ、角速度和角加速度分別為
空載狀態下,根據電磁轉矩方程,得儲能舵機方程為

式中:I儲為儲能電機電流。
同理,普通電動舵機在相同舵偏角運動狀態下的運動方程為

式中:I普為普通電動舵機電流。令
對式(9)求導可知,當f儲(α)取最大值時需滿足

則f儲(α)的最大值為

同理,f普(α)的最大值為

由式(11)~(12)可知,在相同工況下儲能舵機與普通舵機最大消耗電流比值為

設計儲能舵機時,選取剛性系數Ks=[5],則

若傳動比N>0.5,則2A-C>0,此時I儲max<I普max。
因此,當傳動比大于0.5時(實際傳動比大于等于1),舵偏輸出角在相同幅值頻率的情況下,儲能舵機消耗最大電流小于普通舵機,則儲能舵機所需的最大輸出功率小于普通舵機。
2.2 對象特性變化對舵機性能的影響
根據儲能舵機的傳遞函數模型,令
傳遞函數的模為

同理,普通舵機的傳遞函數可表示為

式中:m1=57.3KKtKem-(JmRa+KfLa)Nω2;n1=(KfRa+KeKt)Nω-NJmLaω3;
普通舵機傳遞函數的模為

由于KsRaN,LaKsNω均為正值,因此
因此,為了獲取相同的舵偏輸出角特性,儲能舵機控制時需要對輸入指令進行修正。儲能舵機的方程為
式中:R儲為儲能舵機輸入指 令;為舵偏角δ的一階、二階、三階導數。
同理,無儲能彈簧的普通舵機在相同輸出下的方程為

式中:R普為普通舵機輸入指令。
因此,在相同的輸出需求下,儲能舵機輸入指令的修正值為

3 自適應逆控制
自適應逆控制對對象動態響應的控制采用逆控制的思想,用來自控制器的信號驅動對象。該控制器的傳遞函數是對象本身傳遞函數的逆,則控制器與對象的級聯傳遞函數增益為1,使得輸出跟隨輸入,它只涉及開環控制問題,這樣的控制是簡單、穩定、魯棒的,而且是精確的[3]。
圖4為自適應控制基本概念框圖[3]。由儲能舵機傳遞函數可看出,儲能舵機系統為最小相位系統,即儲能舵機系統具有穩定的逆。
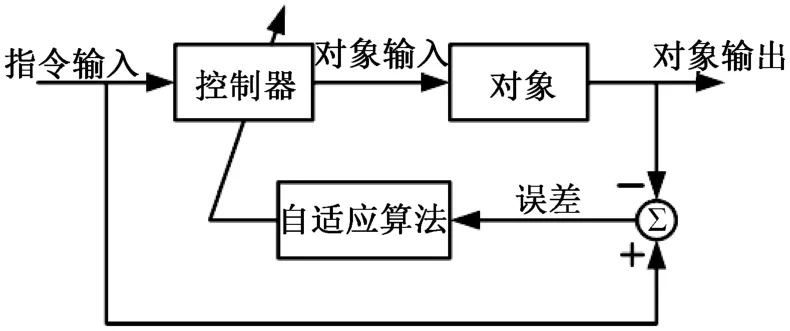
圖4 自適應逆控制基本概念圖Fig.4 Concept diagram of adaptive inverse control
在線自適應求逆過程算法復雜,需要時間長,因此本文首先根據不同的輸入,離線辨識電動舵機建立的模型,結合指令特征,基于自適應逆控制思想,采用自適應最小均方(LMS)濾波器算法構造舵機逆控制器,實現舵機控制。
3.1 舵系統模型辨識
舵系統模型是舵系統逆控制的基礎。采用傳統的PID 校正方法鎮定電動舵機,如圖5所示,電流環以伺服電機電流為反饋量,使電機轉矩跟蹤希望設定值,提高系統低頻段的快速性,抑制電流內部干擾和控制電機電流在許可的工作范圍;位置環以控制對象的角位移輸出為反饋量,以保證系統的穩態精度和動態跟蹤性能。系統外環性能發揮依賴于內環優化,各環調節器性能最優化是整個系統高性能的基礎。
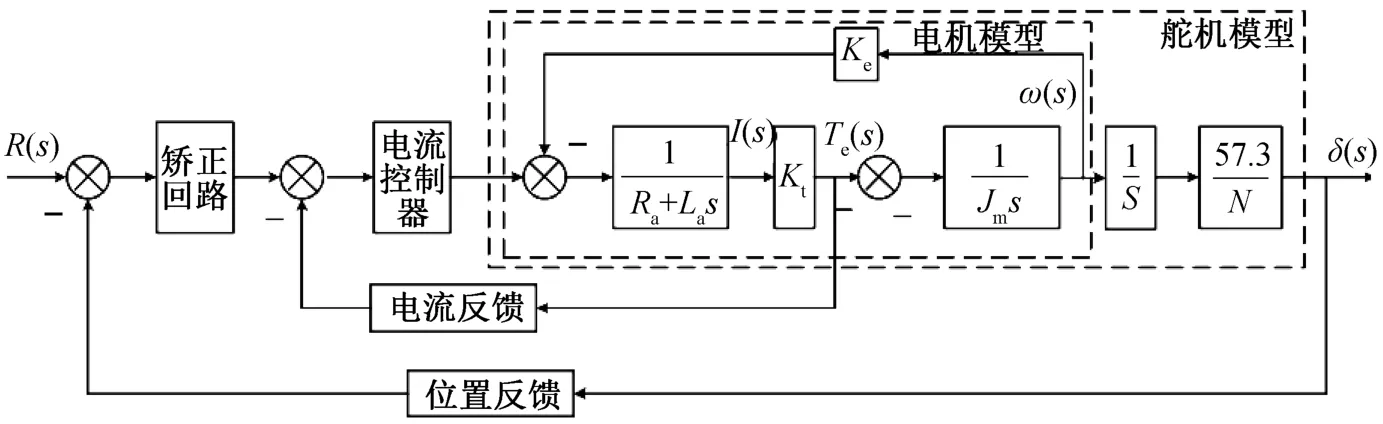
圖5 舵系統控制框圖Fig.5 Block diagram of actuator system control
儲能電動舵系統辨識可采用ARX 模型[8-9]或自適應建模等方法實現,在工程上也可采用專業儀器設備采集頻率數據,并采用最小二乘法獲得舵系統模型。
3.2 舵系統逆模型辨識
選擇電動舵機的參考模型M(z),復制電動舵機模型),結合自適應濾波器,采用LMS 算法,并利用建模信號,離線辨識電動舵機的逆模型C k(z);建模信號為需求的特定的幅值和頻率的正弦信號,得到不同輸入下的權系數W。
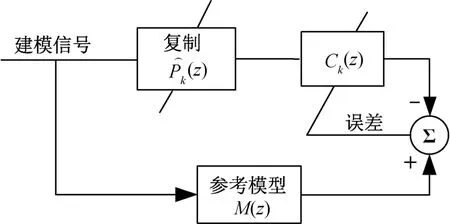
圖6 舵系統逆模型辨識框圖Fig.6 Block diagram of actuator system inverse model identification
LMS算法是利用測量或估計梯度的最速下降的一種實現,k+1時刻W k+1=W k+μ(-)。其中,μ為收斂因子,真實梯度估計是+N k,它等于真實梯度加上梯度噪聲。將單一的誤差εk值的平方并進行微分,可以得到粗略的梯度估計,即得到LMS算法為

其中,第k個輸入信號向量X k=[x1kx2k…x lk…x nk]T,權 系 數 向 量WT=[w1w2…w l…w n],第k次采樣的誤差εk為期望響應d k與輸出信號y k的差,即

其中,收斂因子μ控制了算法的穩定性和自適應速率。對均值和方差都收斂的一個較強的條件為

式中:trR為R(所有進入權系數信號的均方和)的跡。
3.3 儲能舵機控制
在傳統PID 控制基礎上,獲得舵系統模型,結合LMS自適應算法,構造逆模型辨識系統,在線辨識出舵系統逆模型,作為電動舵機控制器。控制結構框圖如圖7所示。
在線辨識逆模型過程中,為了加快自適應算法收斂速度,根據旋轉彈輸入指令特征,即依據當前舵指令、舵偏速度以及旋轉彈的旋轉頻率信息,實時建立舵指令模型,如式(26)所示,從而生成自適應算法需要的指令序列,同時將Matlab仿真得到的權值W作為初值,實現在線逆模型辨識,加快收斂速度,使得舵機快速準確跟蹤。
基于自適應逆控制的儲能舵機控制步驟如下:1)鎮定電動舵機;2)辨識舵系統模型;3)在線求逆過程,首先根據指令輸入特征確定舵系統模型,其次根據指令輸入特征,實時生成舵指令序列,采用自適應LMS濾波器在線求逆模型;4)復制逆模型作為電動舵機控制器。

圖7 控制結構框圖Fig.7 Control block diagram
4 仿真與分析
4.1 電動舵系統仿真
基于某型電動舵機進行仿真,鎮定后的電動舵機離散傳遞函數為
確定旋轉彈彈旋頻率為10 Hz,則

儲能舵機的傳遞函數為

采用Matlab仿真獲得相同輸入幅值條件下普通舵機與儲能舵機跟蹤性能如圖8所示。
仿真結果表明,舵機在彈旋頻率工況下,采用自適應逆控制的儲能舵機在減小功耗的同時,通過選取合適的收斂因子,克服了引入儲能機構帶來的缺陷,達到了與普通舵機相媲美的跟蹤性能,即基于自適應逆控制的儲能舵機對對象特性變化不敏感。
由圖8可以看出,在0.25 s以內,基于自適應逆控制的舵機跟蹤性能較差。這是由于自適應逆系統訓練過程需要一定的時間,因此在實際使用過程中,結合圖7,在訓練過程中,控制器傳遞函數為1,當自適應逆控制收斂后,復制逆模型作為控制器。同時為了加快算法收斂速度,結合旋轉彈舵機指令特征生成指令序列,采用Matlab仿真得到的權值W,作為LMS算法輸入,從而在一個算法解算周期內,實現在線逆模型辨識,使得舵機準確快速跟蹤。
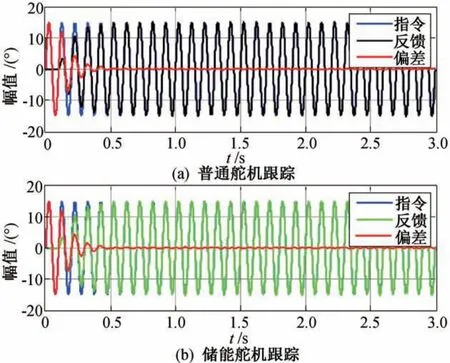
圖8 相同輸入幅值條件下舵機跟蹤性能Fig.8 Actuator tracking performance at same input amplitude
4.2 電動舵系統實驗
舵機控制DSP采用TMS320F28335芯片,相比于TMS320F2812,其綜合計算能力提高了2~3倍,是目前伺服控制領域應用較多的處理器。控制軟件為嵌入式控制軟件,完成指令接收與遙測數據發送功能、信號處理和控制算法解算功能等。控制軟件主要包括初始化子程序、定時中斷子程序、數據接收與解析子程序、PID算法子程序以及基于自適應逆的控制器子程序等。控制軟件的基本流程如圖9所示。基于某型電動舵機進行實驗,將輸入信號為15°(10 Hz),普通舵機與儲能舵機的跟蹤情況如圖10所示。
由圖可以看出,調整合適的收斂因子和濾波器階數,兩種舵機對于旋轉彈特定頻率下的指令具有很好的跟蹤效果。結果表明,基于自適應逆控制方法的儲能舵機無需對輸入進行修正即可獲得與普通舵機相近的控制效果。同時,根據旋轉彈的舵系統指令特征,實時生成自適應算法需要的指令序列,該序列經過參考模型作為期望信號,可以有效消除舵指令的干擾。
5 結論
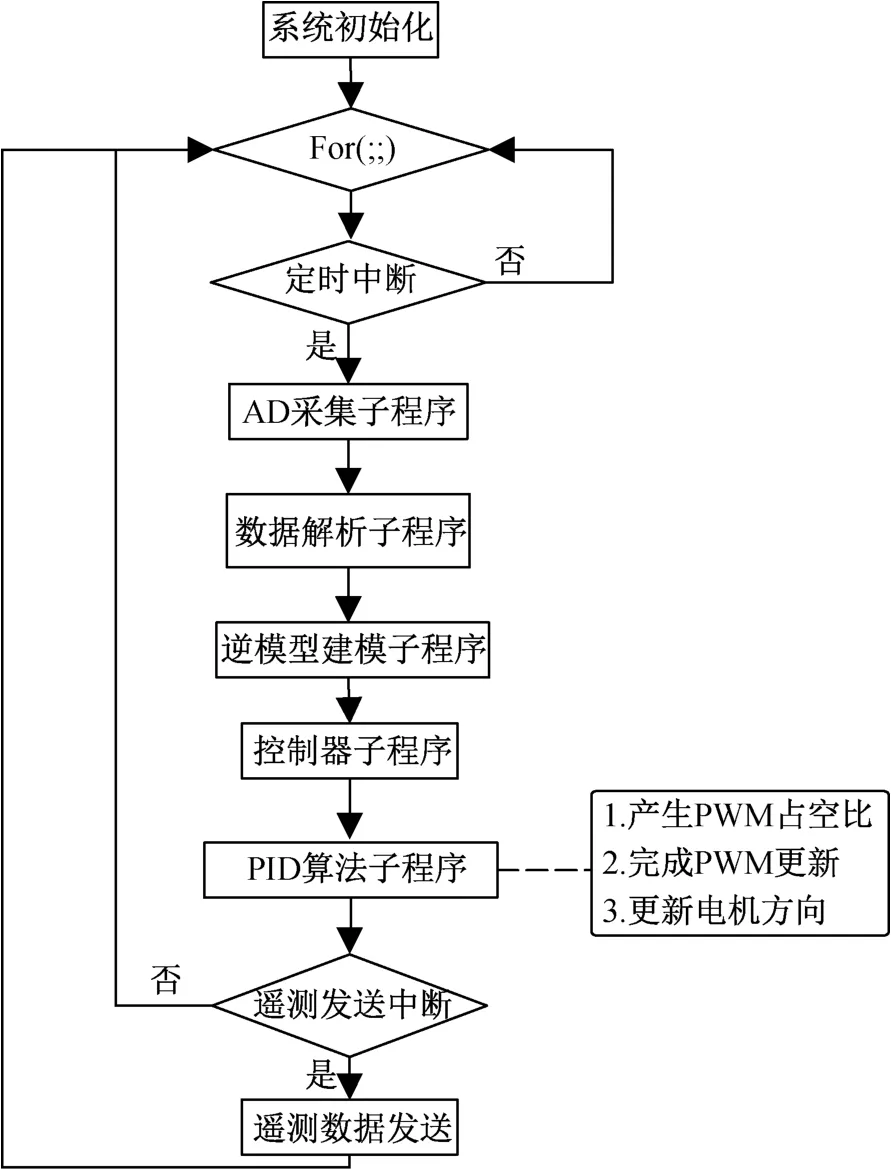
圖9 算法實現流程圖Fig.9 Algorithm flow chart
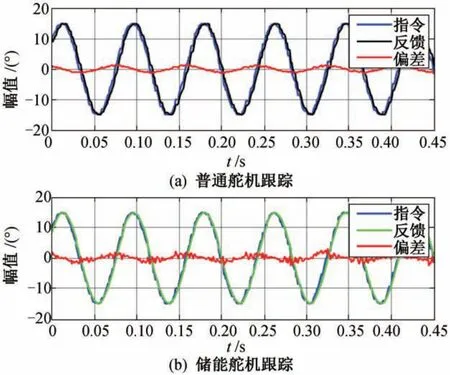
圖10 輸入信號為15°時的舵機跟蹤性能Fig.10 Actuator tracking performance when input signal is 15°
本文建立儲能舵機的運動學模型,分析對比儲能舵機與普通舵機的電流需求,并在此基礎上分析對象特性變化對舵機的影響。分析結果表明儲能舵機的功耗小于普通舵機,且在相同輸入下儲能舵機帶寬低于普通舵機。為了獲得相同的輸出,儲能舵機相比于普通舵機需要進行指令修正,本文給出了修正方程。采用自適應逆控制,根據旋轉彈輸入指令特征,實時建立舵指令模型。仿真與試驗結果表明,基于自適應逆控制的儲能舵機,無需修正指令,選取合適的收斂因子與濾波器階數,可獲得與普通舵機相同的跟蹤效果,同時自適應逆控制的濾波特性可以有效消除舵指令干擾。在實際工程應用中,旋轉彈電動舵機的指令信號頻率并非固定不變的,對于不同的特征指令,控制算法中的收斂因子應適當的調整,今后將對此進行深入研究,同時結合工程實踐進一步分析儲能舵機功耗的影響因素,如非線性因素。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
家庭影院技術(2017年9期)2017-09-26 03:41:45