基于霧霾溯源的自循跡智能車的路徑控制系統(tǒng)設(shè)計(jì)
2019-10-24 05:08:40孫佰全錢學(xué)明
產(chǎn)業(yè)與科技論壇 2019年18期
□孫佰全 錢學(xué)明
一、引言
近年來,隨著社會(huì)經(jīng)濟(jì)的快速發(fā)展,深度工業(yè)化帶來的是空氣質(zhì)量不斷惡化。我國中東部地區(qū)相繼出現(xiàn)大范圍霧霾天氣,對城市的安全運(yùn)營和百姓的日常生活造成了嚴(yán)重影響。
目前,霧霾監(jiān)測的主要方法有β射線法、光散射法以及微量振蕩天平法等。蘭冰芯等[1]采用MSP430F149單片機(jī),借助GP2Y1010AU0F光學(xué)空氣質(zhì)量傳感器設(shè)計(jì)了PM2.5測試儀。沈行良等[2]采用STM32系統(tǒng)板和PMS5003霧霾傳感器設(shè)計(jì)了大氣動(dòng)態(tài)霧霾檢測系統(tǒng),同時(shí)利用GPRS將霧霾測量數(shù)據(jù)傳送到云端服務(wù)器。任鑫等[3]基于S1216F8-BD的GPS定位模塊,采用STM32和PM2.5傳感器YW_51GJ,設(shè)計(jì)了具有定位功能的PM2.5檢測系統(tǒng)。
隨著嵌入式技術(shù)的突飛猛進(jìn),具有傳感器-執(zhí)行器的智能車逐漸成為霧霾監(jiān)測的主要工具[4~5]。其導(dǎo)航方式主要有光電反射、機(jī)器視覺以及GPS等。本文擬設(shè)計(jì)通過感知霧霾濃度自循跡的智能車控制系統(tǒng),其方向朝霧霾濃度升高處運(yùn)動(dòng)。到達(dá)霧霾源后,智能車啟動(dòng)執(zhí)行器驅(qū)散霧霾。
二、系統(tǒng)總體設(shè)計(jì)
基于霧霾溯源的智能車系統(tǒng),主要包括霧霾數(shù)據(jù)采集模塊、MCU模塊、防碰撞模塊、執(zhí)行器模塊四個(gè)部分。如圖1所示。
三、系統(tǒng)硬件設(shè)計(jì)
(一)霧霾數(shù)據(jù)采集模塊。霧霾數(shù)據(jù)采集模塊,采用灰塵傳感器GP2Y1010AU0F,是整個(gè)系統(tǒng)的循跡部分。該設(shè)備能夠有效地檢測到像香煙煙霧等非常細(xì)的粒子。另外,它可以通過脈沖模擬輸出區(qū)分房子內(nèi)的煙霧和灰塵。系統(tǒng)接通電源后,灰塵傳感器在1秒內(nèi)即能穩(wěn)定、正常的工作,采集霧霾數(shù)據(jù),并反饋給MCU進(jìn)行處理。
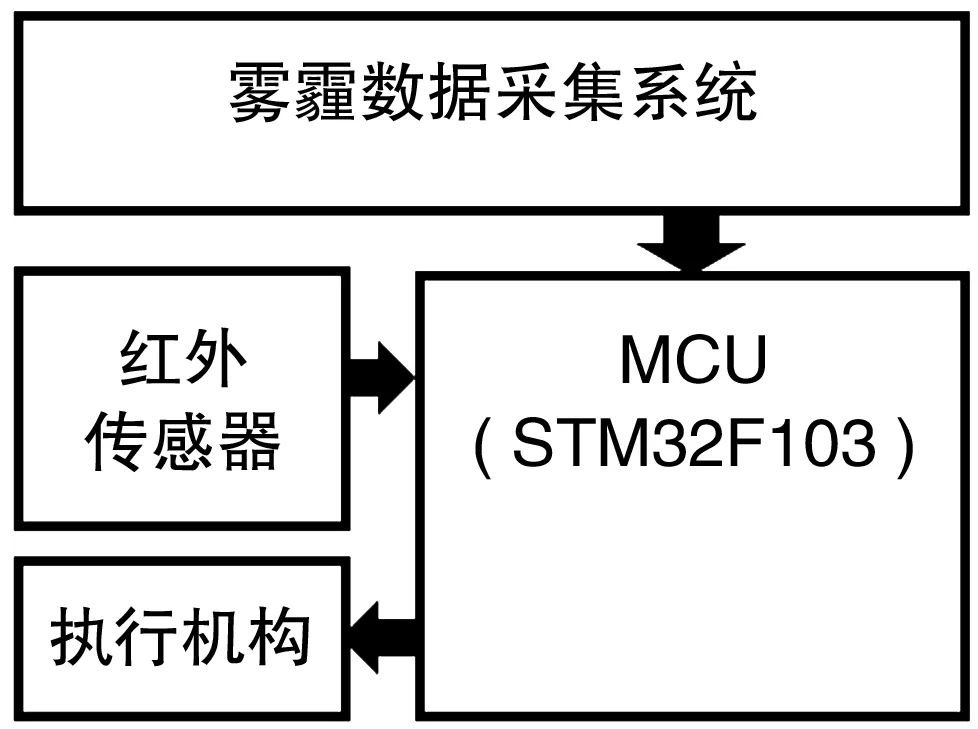
圖1 系統(tǒng)原理框圖
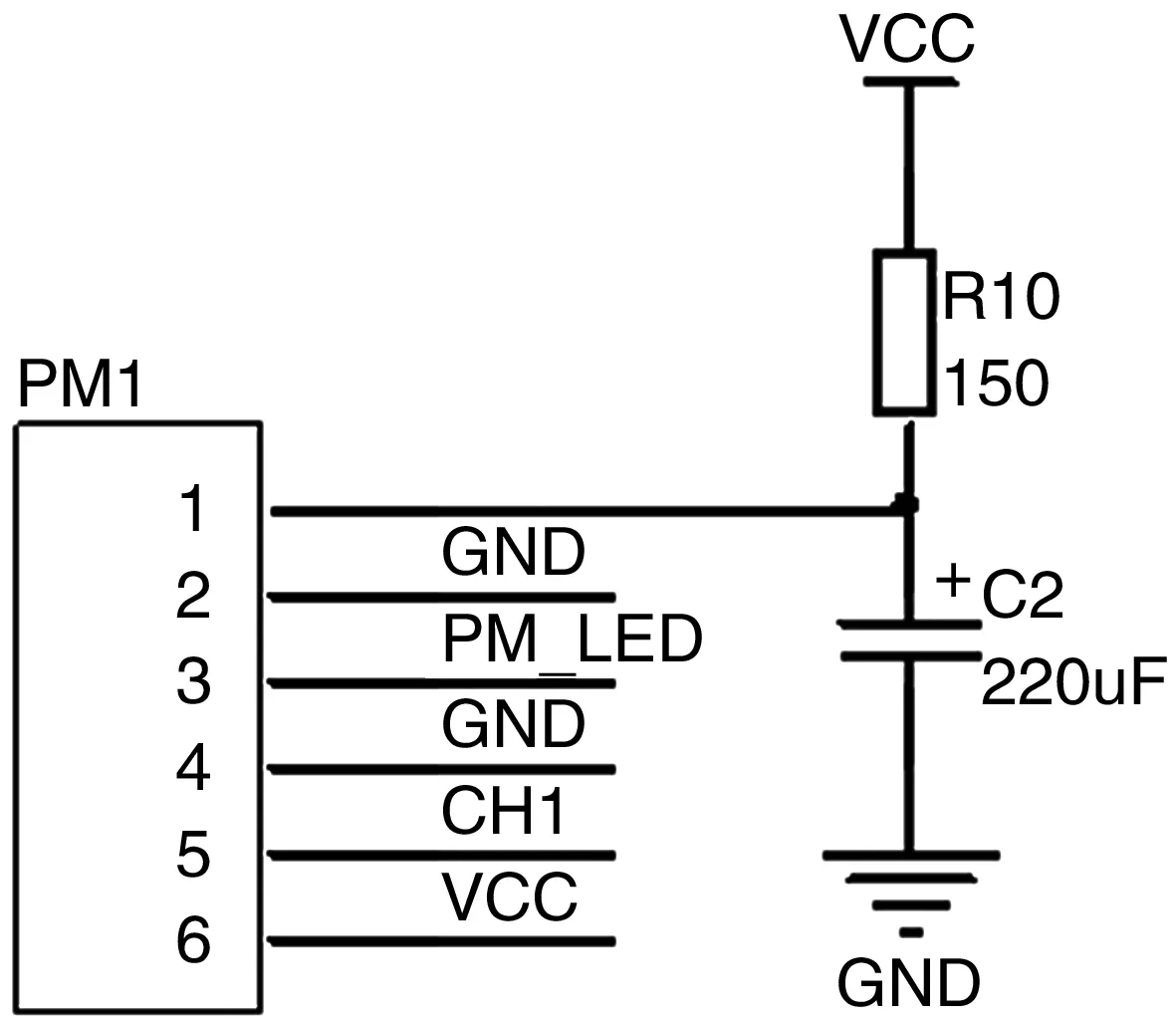
圖2 霧霾數(shù)據(jù)采集模塊電路
此外,在該模塊中還加入了LCD1602液晶顯示屏和提示音模塊。LCD1602是一種工業(yè)字符型液晶,工作電壓只需3.3V,微功耗、體積小且能夠同時(shí)顯示32個(gè)字符,用以實(shí)時(shí)顯示霧霾濃度。提示音模塊采用蜂鳴器實(shí)現(xiàn)警示提醒。當(dāng)霧霾濃度超過一定閾值時(shí),蜂鳴器發(fā)出聲光報(bào)警。
(二)MCU模塊。智能車的核心板采用STM32F103RCT6。它是一種32位帶FLASH的嵌入式-微控制器集成電路。工作電壓2V~3.6V,LQFP小型封裝使得電路設(shè)計(jì)更小、功耗更低。晶振電路由一個(gè)8MHz的晶振、兩個(gè)30pF電容以及一個(gè)1M電阻組成。復(fù)位電路采用按鍵復(fù)位。兩個(gè)穩(wěn)壓芯片AMS1117-3.3,一個(gè)用于DC插座供電,另一個(gè)用于USB供電。
(三)防碰撞模塊。由于紅外線穿透云霧能力較強(qiáng),因而采用紅外避障。防碰撞模塊具有一對紅外發(fā)射和接收管。發(fā)射管發(fā)出一定頻率的紅外線,遇到障礙物后,反射回來被接收管接收,經(jīng)過LM393處理后,可以探測距離,且干擾較小。如圖3所示。
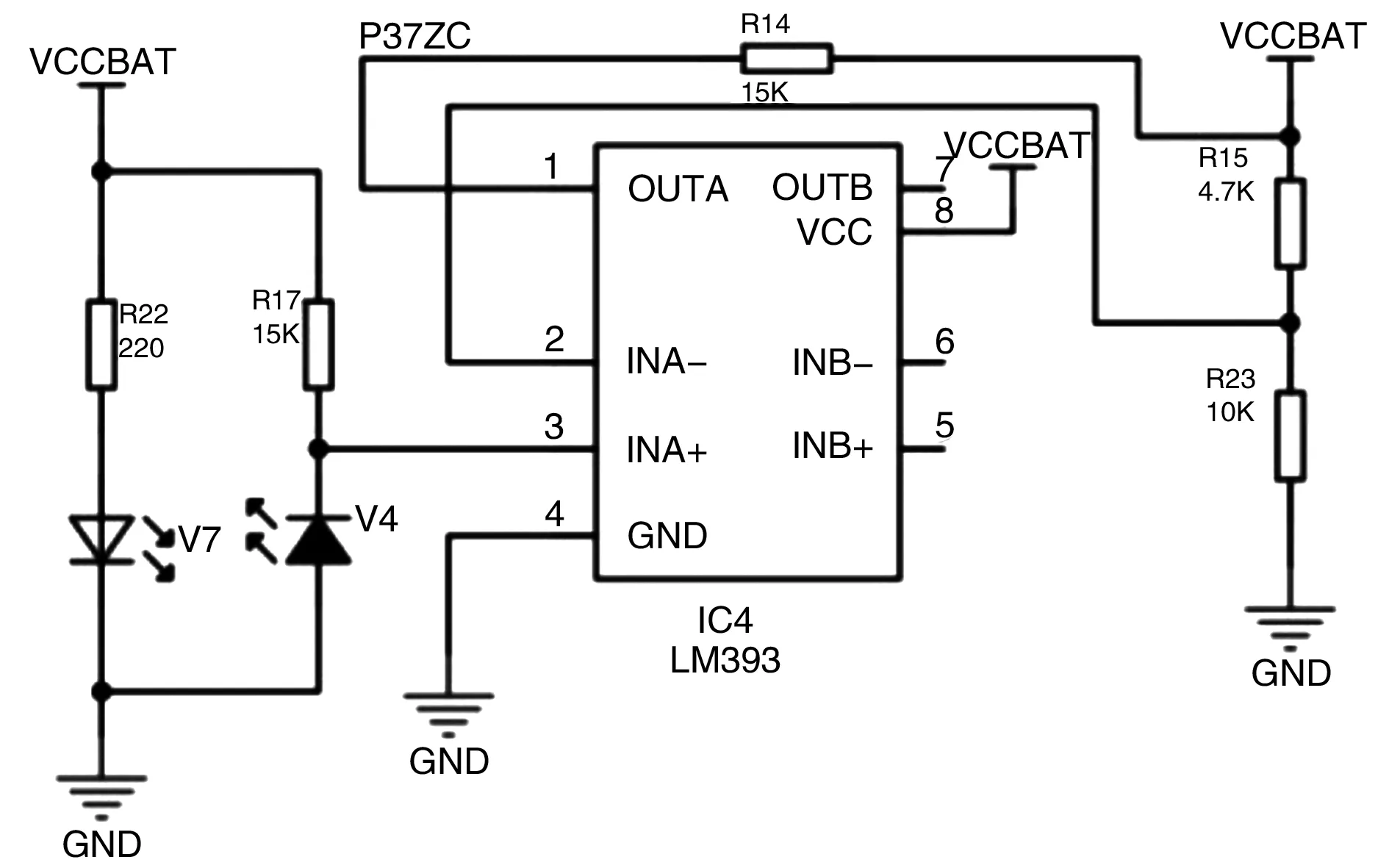
圖3 紅外避障電路
(四)執(zhí)行機(jī)構(gòu)模塊。當(dāng)智能車循跡霧霾濃度來到源點(diǎn)后,隨即打開執(zhí)行器,例如噴灑化學(xué)制劑消解霧霾,或是打開風(fēng)扇吹散霧霾等。
四、系統(tǒng)軟件設(shè)計(jì)
本系統(tǒng)在軟件環(huán)境Keil 5中采用C語言編寫。程序首先系統(tǒng)初始化,主要包括STM32F103RCT6初始化,串口初始化、I/O初始化等。
(一)霧霾采集模塊的程序設(shè)計(jì)。霧霾采集程序中通過灰塵傳感器獲取霧霾數(shù)據(jù),經(jīng)過AD模數(shù)轉(zhuǎn)換,計(jì)算智能車所在位置的霧霾濃度,在LCD液晶顯示屏上實(shí)時(shí)顯示。同時(shí),程序?qū)⒏鶕?jù)預(yù)先設(shè)定的霧霾濃度危害上限閾值對該位置霧霾濃度是否超標(biāo)進(jìn)行判斷。若該位置霧霾濃度超過閾值,則蜂鳴報(bào)警。反之,則繼續(xù)循環(huán)。如圖4所示。
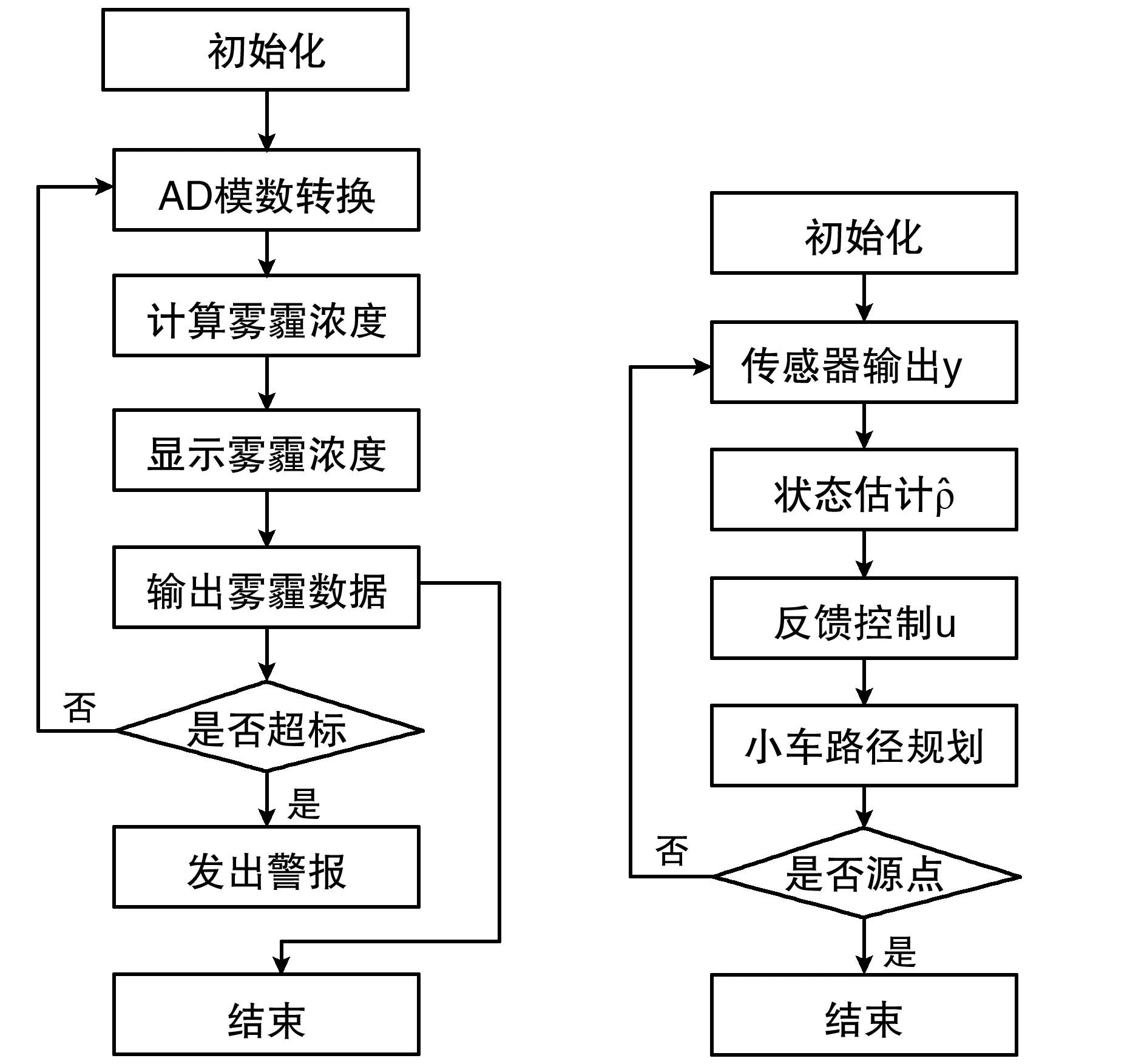
圖4 霧霾采集程序流程圖圖5 智能車路徑控制程序流程圖

五、結(jié)語
本文基于霧霾溯源設(shè)計(jì)了自循跡智能車路徑控制系統(tǒng)。通過選用灰塵傳感器獲取霧霾數(shù)據(jù),其濃度實(shí)時(shí)顯示在LCD液晶顯示屏,同時(shí)智能車循跡霧霾擴(kuò)散環(huán)境,考慮霧霾擴(kuò)散源定位算法,在基于觀測狀態(tài)的反饋控制策略下,實(shí)現(xiàn)了智能車自主循跡前往霧霾濃度最高處的路徑控制,進(jìn)而在霧霾擴(kuò)散源啟動(dòng)執(zhí)行器驅(qū)散霧霾。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17