壓縮機防喘振智能控制系統的研究
2019-10-24 07:20:12高艷春
發明與創新·職業教育 2019年7期
高艷春
摘 要:本文闡述了壓縮機喘振機理以及喘振特性分析,為防喘振控制方法的改進提供了前提。將傳統的PID控制與模糊控制相結合,應用MATLAB進行系統性能仿真。經過仿真結果可以看出模糊PID控制能夠更好地適應壓縮機系統變工況運行。
關鍵詞:防喘振;PID控制;模糊控制
壓縮機在運行過程中,當負荷降到一定程度時,壓縮機氣體流量和壓力將按照一定的周期性變化,其變化頻率比較低而振幅卻比較大,壓縮機的機身會振動的比較劇烈,并發出“哮喘”或吼叫聲,這種現象就叫做“喘振”。壓縮機喘振具有很大的危害性,一旦發生喘振,嚴重時會造成壓縮機的軸承、密封、葉輪以及轉子的損壞。有時壓縮機雖然發生喘振現象,但對其并沒有產生明顯的損害,可是它會降低其工作效率和使用壽命。所以針對喘振對壓縮機的不利影響及目前方法的局限性,對喘振控制系統的研究尤為重要。
一、壓縮機防喘振機理及特性分析
(一)喘振機理的研究
壓縮機工況的變化會引起壓縮機的喘振、逆流、旋轉失速等問題。目前關于壓縮機的喘振機理的研究,還沒有得出完整確切的結論。對于喘振現象的產生,通常情況下認為是由內因和外因兩個因素造成的。從內部因素來講,是因為在一定的條件下,壓縮機內的氣體發生旋轉脫流;從外部因素來講,與壓縮機聯合工作的網管容量和特性有關。
(二)壓縮機喘振特性分析
壓縮機正常運行時位于工作點處,其壓力和流量取決于工作點的位置。大部分情況下,是否發生了喘振現象,可以通過流量的改變量進行判斷,入口流量閥或出口流量閥的打開程度,及壓縮機的停機都會改變流量的大小。控制系統通常情況下工作在穩定區域,此區域的位置在喘振點和最小流量點之間,這樣可以避免工作點到達喘振點。
二、防喘振控制方案的研究
(一)防喘振控制系統
本控制系統在設計時主要應用控制回流量的方法。對于回流量的控制通過控制回流閥的開度來實現,從而預防壓縮機發生喘振現象。在正常操作時,壓縮機工作在安全模式下,在這種模式情況下回流閥是全關的狀態。
(二)控制算法的研究
常規 PID控制具有算法簡單、適應性強、魯棒性好、計算量小等特點,而廣泛應用于過程控制中。但是,對于那些數學模型復雜而且不夠精確、存有非線性、強干擾特性的控制對象,很難達到預期的控制要求。而近年來隨著科技的發展出的模糊控制,它最大優點是對其所控制對象不需要具有精確的數學模型。它對參數未知,存在滯后或隨機干擾的系統有較好地控制效果。把傳統的PID控制與模糊控制結合在一起應用,在控制系統中發揮其優越性,此種控制將會是一種實用而行之有效的控制方法。
(三)模糊自適應PID控制器的設計
模糊自適應PID控制器是利用模糊規則對PID參數進行修改而構成的。它以誤差 e 和誤差變化 ec 作為輸入量,能夠滿足不同時刻的誤差和誤差變化對PID參數自適應要求。
PID 參數模糊自適應主要目的是確定PID的參數比例增益、積分增益、微分增益與 e 和 ec 之間的模糊關系,通過在運行中不斷檢測 e 和 ec ,并以 PID 參數的修正量(、、)為輸出,以滿足不同時刻偏差和偏差變化對 PID 參數整定的要求,從而使被控對象具有良好的動態和靜態特性。
最終得到 PID 控制器的參數,、、,其中、、為預整定值。
三、仿真與結果分析
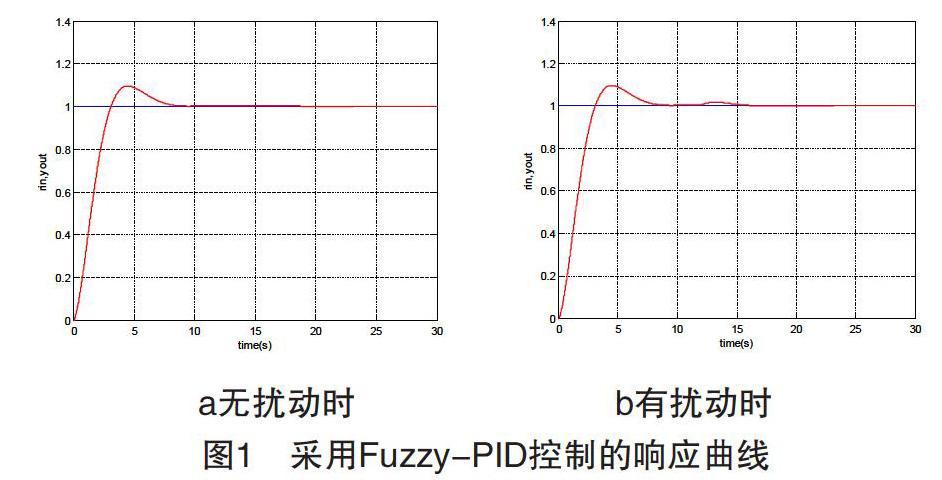
在MATLAB環境下進行仿真,采用三角形隸屬函數,仿真結果如圖1所示,其中a圖對應著未加入擾動的響應曲線,b圖對應加入擾動的響應曲線。
通過仿真曲線可以看出,采用三角形隸屬函數的系統性能良好,同時計算量減少,編程得到很大的簡化。Fuzzy-PID控制的動態過程縮短,抗擾動性能變好,超調量明顯減小,能夠很好的保證壓縮機穩定地工作在設計工況點。
結論
把傳統PID控制和模糊控制相結合進行應用,設計出合適的Fuzzy-PID控制器,這樣的防喘振控制系統能夠更好地適應壓縮機系統變工況運行,有利于整個壓縮機系統在工況區運行,值得工業應用與檢驗, 具有較高的工程實用價值。
參考文獻
[1] 尹志宇.一種新型 Fuzzy-PID 控制器的研究[J].河北師范大學校報,2008(2):174-176.
[2] 李士勇.模糊控制·神經控制和智能控制論[M].哈爾濱:哈爾濱工業大學出版社,1998.
