磁鏈無差拍控制的開關磁阻電機轉矩脈動抑制
2019-10-31 08:53:30許愛德張文何昆侖曹玉昭
電機與控制學報 2019年8期
許愛德 張文 何昆侖 曹玉昭
摘要:針對開關磁阻電機(SRM)的直接轉矩控制(DTC)中滯環容差導致的轉矩脈動大、開關頻率不恒定的問題,提出了磁鏈無差拍控制(DB-Fc)。通過分析sRM的基本原理,對DB-Fc算法的電壓控制率進行理論推導,解析獲得一個控制周期內能補償轉矩和磁鏈所需要的電壓矢量,使磁鏈能被定量調節。通過空間電壓矢量調制技術合成所需新電壓矢量作用于SRM,進而實現在一個采樣周期內無差跟蹤給定磁鏈,避免了DTC策略的容差超調現象。以三相12/8極SRM為控制對象,將DB-Fc與DTc算法進行仿真分析和實驗對比。結果表明,DB-Fc實現了轉矩脈動的最小化,調速性能與動態響應能力良好,且計算量小、易于實現。
關鍵詞:開關磁阻電機;直接轉矩控制;磁鏈無差拍控制;空間矢量脈寬調制;轉矩脈動
DoI:10.15938/j.emc.2019.08.008
中圖分類號:TM352文獻標志碼:A 文章編號:1007-449X(2019)08-0057-10
0引言
隨著能源危機與環境危機問題日益嚴重,能耗低、污染小的開關磁阻電機(switched reluctance mo-tor,SRM)越來越受到大家的關注。SRM因結構簡單、成本低、效率高和無需稀土材料等優勢,目前已成為業界關注的熱門電機。但SRM的雙凸極結構使得其轉矩脈動大,進而導致噪聲和振動,惡化其低速性能,從而阻礙和限制了SRM的廣泛應用。
為減小SRM轉矩脈動,國內外學者從SRM本體結構設計和采用合適控制策略2個角度開展研究,但是前者主要從電機定轉子結構、參數等方面進行優化,通常以犧牲SRM的效率為代價。對此,從事于SRM調速系統科研、開發與制造的學校、研究院、企業等經常采用控制策略對SRM進行研究,其主要分為對轉矩的直接控制和間接控制。前者直接對磁鏈和轉矩控制,可直接產生各相的開關信號,對轉矩脈動抑制十分有效,較間接控制更符合SRM控制策略的發展趨勢。
但直接轉矩控制(direct torque control,DTC)本身就是一種容差控制,不可避免的存在紋波脈動,未能將轉矩脈動最小化。為更進一步減小轉矩脈動,基于DTC技術,學者們將直接瞬時轉矩控制(di_rect instantaneous torque control,DITC)應用于SRM中。為解決DTC滯環控制中存在的紋波脈動問題,西班牙學者J.Castro通過引入PI控制來減小DITC中的轉矩脈動,東南大學的朱葉盛等將DITC和脈寬調制控制方法相結合以抑制SRM的轉矩脈動。有學者將DTC中的滯環控制器替換為自適應控制器,本課題組也曾采用雙滯環以優化SRM轉矩滯環。但近年來有學者在感應電機和永磁同步電機等的DTC中引入無差拍控制來解決滯環容差問題。該技術使系統在單一采樣周期內跟隨給定值,進而使SR電機的轉矩脈動減小,動態響應速度提高,以及系統損耗減小。浙大學者Hao Wen在DITC中引入了無差拍控制的方法,從能量的角度推導無差拍的控制量,在Simulink仿真環境下驗證算法的有效性,但沒有進行實驗驗證。
因此,針對SRM的DTC策略研究現狀,將無差拍技術引入SRM的DTC算法中是其在理論和應用方面的進一步研究和完善。本文通過對SRM的磁鏈無差拍算法的電壓控制率進行理論推導,對無差拍控制策略應用到SRM中進行研究,以解決DTC滯環容差問題,實現SRM的轉矩脈動最小化。
1開關磁阻電機的DTC策略
1.1開關磁阻電機的DTC原理
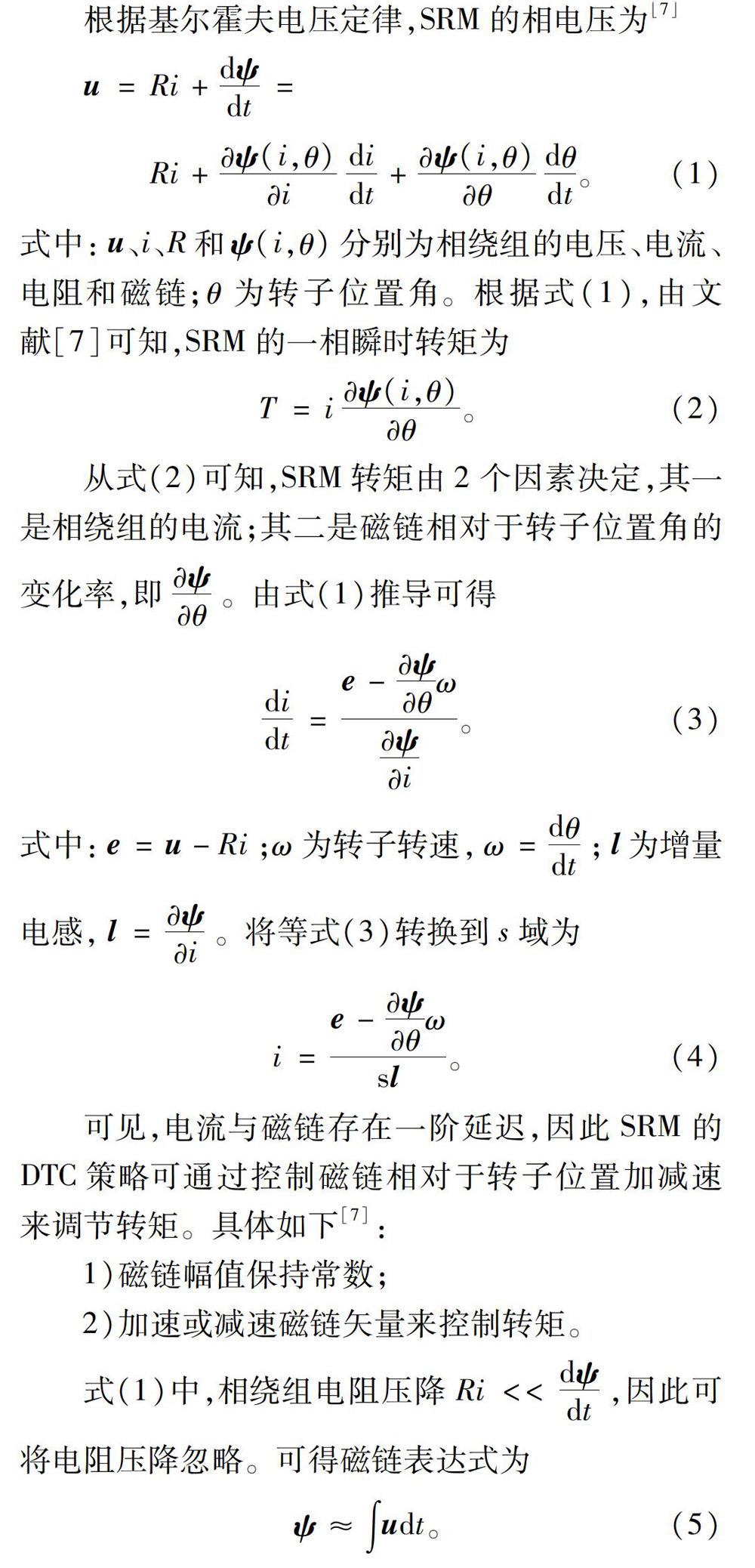
顯然,通過調節u可直接實現對磁鏈的調節。以12/8極SRM為研究對象,考慮到三相繞組空間中互差120°且完全對稱,因此三相繞組的電壓矢量疊加可產生基本電壓矢量,如圖1所示,其中,“1”代表正電壓,“0”代表零電壓,“-1”代表負電壓,將其在空間上劃分為六扇區N=0~5。以轉子逆時針旋轉為正方向,電壓矢量選取規則在表1中列出,增大用符號“↑”表示,減小為“↓”。
1.2存在問題
基于上述理論可知,SRM的DTC策略根據轉矩誤差和磁鏈誤差來選取所需電壓矢量,進而調節磁鏈和轉矩。轉矩及磁鏈的調節均采用滯環控制即Bang-Bang控制。
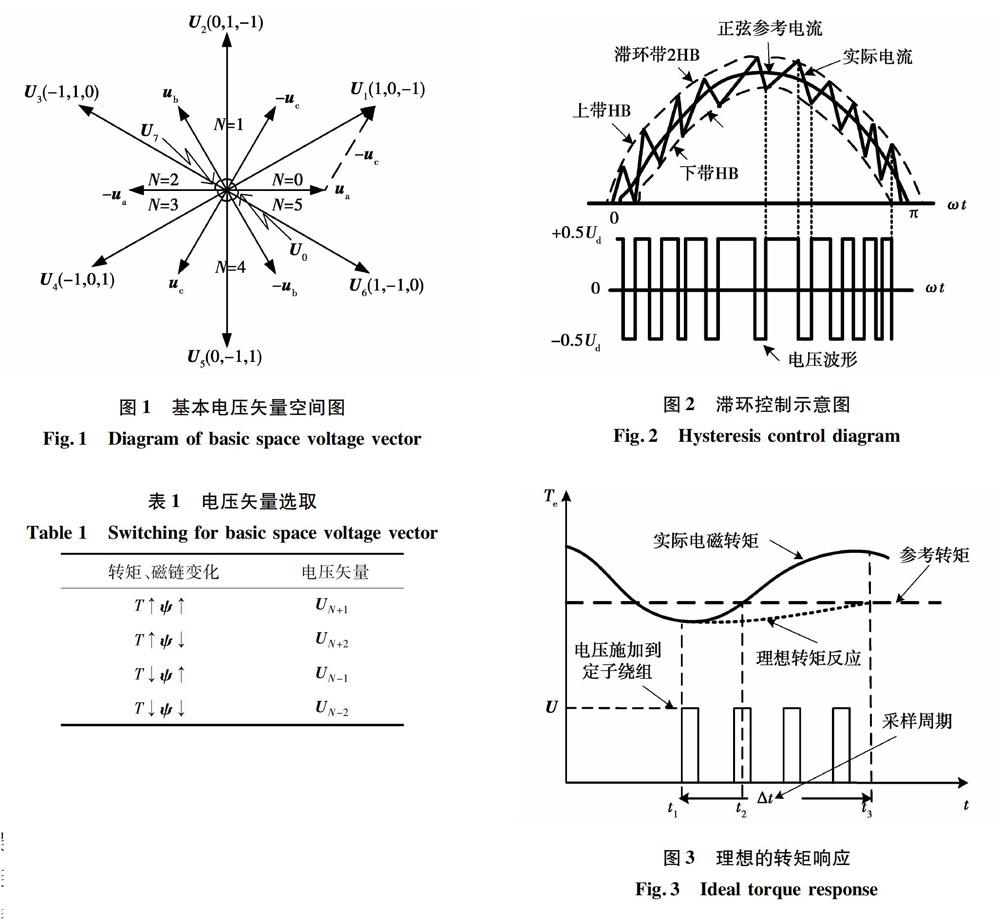
滯環控制原理由圖2說明。圖中參考值是正弦電流,Bang-Bang控制的主要問題是實際電流會圍繞參考電流上下2HB脈動,并且開關頻率不斷變化,即使采用固定頻率后也同樣存在脈動問題。
圖3采用固定采樣頻率調節占空比進行轉矩控制,在f,時刻,轉矩誤差為AT=Te*-Te>0,施加一個脈沖電壓給定子繞組,在t2時刻AT=0時,采樣周期未結束,將繼續保持高電壓脈沖施加到定子繞組,結果使t3時刻采樣周期結束的時候△T<0。顯然,此時不能跟隨參考轉矩,而是超過給定值,理想的轉矩反應如圖3中短虛線可直接達到給定轉矩。
由以上分析可知,滯環控制是一種容差控制,會帶來潛在的紋波脈動。在DTC過程中,逆變器的開關頻率受轉速、負載以及滯環控制器的滯環寬度影響,由此引起了脈動。這種紋波脈動的存在還有一個重要原因是,在數字系統中,處理器的控制過程是離散的,在一個周期內控制器的輸出不能和電機的反饋同步。采樣時刻與控制時刻之間存在一個采樣周期的延遲,在第k個采樣點計算獲得的數值在第k-1個周期才起作用。
2磁鏈無差拍控制
2.1磁鏈無差拍控制的原理
開關磁阻電機的轉矩數學模型完全不同于感應電機及永磁同步電機等,無法直接求得能使轉矩誤差為零的電壓矢量。DTC算法雖能調節電機的定子磁鏈和電磁轉矩,但不能定量調節,為研究無差拍算法,需先從磁鏈的定量調節人手,提出了磁鏈無差拍算法(deadbeat-flux control,DB-FC)。
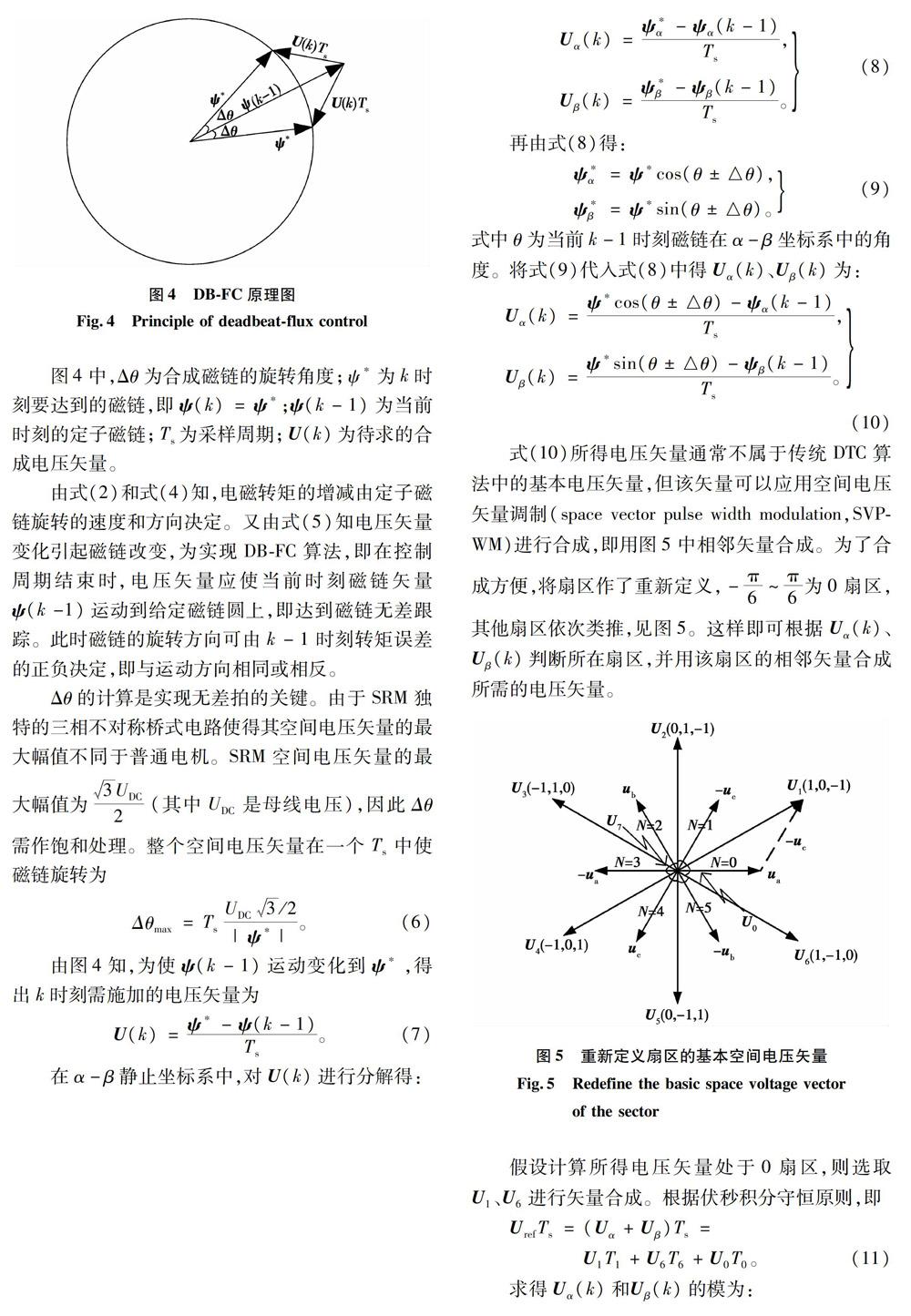
為在一個采樣周期得到能消除定子磁鏈誤差的電壓矢量作用于電機,借助于圖4說明,忽略電阻壓降,當前磁鏈矢量為φ(k-1)。在k-1時刻,為使k時刻定子磁鏈能達到給定值φ*,則合成的磁鏈u(k)T*應與φ(k-1)矢量求和,此時使φ(k-1)根據需要旋轉△θ角度,則磁鏈可達到給定。若需增加轉矩,則合成定子磁鏈ψ(k-1)應正向旋轉△θ角度;反之,則合成磁鏈ψ(k-1)應反向旋轉△θ角度。因此,此算法能消除磁鏈誤差,同時非定量調節電磁轉矩。
顯然,提出的DB-FC策略,避免了固定的開關表,且能通過SVPWM技術合成恰好補償磁鏈誤差的電壓矢量,相對滯環控制,容差減小,同時一個采樣周期延遲的問題也被解決。DB-FC算法避免了傳統DTC算法在一個周期內僅發單一電壓矢量而導致轉矩、磁鏈過補償的問題,有效減小了轉矩脈動。
2.2磁鏈無差拍系統構成
基于上述理論,搭建了SRM的DB-FC系統框圖,見圖7。除DB-FC控制器外,觀測器、速度調節器等部分完全同傳統DTC。
DB-FC控制器可輸出下一時刻達到給定所需的電壓矢量,再通過SVPWM技術合成相應矢量,最后根據電壓開關信號控制功率變換器以合成該矢量。以所求電壓矢量落在0扇區為例,在k-1時刻根據本周期磁鏈和轉矩誤差,計算出待發電壓矢量。根據所在扇區,獲得相鄰電壓矢量的對應作用時間,并作用于各自矢量,最后將2個電壓矢量進行矢量求和,在此過程中可以結合零矢量。最終目的是使磁鏈在下一時刻(即k時刻)達到給定。
3.2磁鏈無差拍控制仿真結果
同樣條件下,磁鏈無差拍系統的轉矩恒定和轉矩突變情況的仿真結果如圖11、圖12和圖13所示。磁鏈圓的滯環明顯減小許多,穩態和動態時的轉矩控制明顯得到好轉,不再有嚴重脈動及失控現象。
4實驗驗證
為驗證DB-FC策略的有效性,搭建了SRM實驗平臺,如圖14所示。
實驗樣機采用三相12/8極SRM,額定電壓DC520V,額定功率15kW,額定電流31A,額定轉速1500r/min,額定轉矩95.5N·m。控制器選用TMS320F2812。磁粉制動器TJ-POD-5作為電機負載,其能輸出恒定力矩。三相電流用3個電流探頭采集,輸出轉矩用JN338型轉矩轉速測量儀進行測量,其輸出信號為電壓信號,當轉矩為0時,輸出的電壓信號平均值為5V,SRM總轉矩為95.5N·m,故轉矩與電壓的轉換關系為
圖15(a)是DTC控制的電流和轉矩波形,轉矩脈動幅值4.8N·m,圖15(b)為DB-FC控制,其轉矩脈動幅值3.6N·m,顯然比DTC轉矩脈動減小了1.2N·m。
為驗證磁鏈無差拍控制算法的動態穩定性,本文對傳統DTC與磁鏈無差拍控制算法進行了負載突變的測試。實驗結果如圖16(a)和圖16(b)所示。
在圖16(a)中,負載轉矩從5N·m跳變到11N·m;圖16(b)中,負載轉矩從5N·m跳變到12N·m。在對DTC和磁鏈無差拍算法轉矩突變實驗驗證時,DB-FC的負載轉矩跳變值大于DTC,此情況下,DB-FC仍具有良好的動態穩定性。
特別說明:實驗平臺將磁粉制動器作為負載,而該負載只能通過手動調節施加負載的大小,并且要求負載的改變是瞬間的,在手動操作時很難精準地調節負載轉矩到理想的負載轉矩值。因此,只能盡量保證2次對比實驗中的負載轉矩保持一致。
眾所周知,電機實際上是通過磁鏈的作用使得轉子旋轉,若定子磁鏈控制得當,也會一定程度上減小轉矩脈動,DB-FC正是利用此點。在仿真中,驗證了傳統DTC與DB-FC磁鏈圓同是圓形的情況下,DTC算法磁鏈圓寬度要高于DB-FC控制,即DB-FC算法下的磁鏈脈動明顯減小。在施加負載、給定轉速時,DB-FC的轉矩脈動系數均小于DTC。在突加負載轉矩時,DTC轉矩脈動增大,而DB-FC方法確近乎維持不變。實驗也同樣證實了DB-FC在上述條件下能有效減小轉矩脈動。
5結論
本文研究SRM的磁鏈無差拍控制,采用SVP-WM技術合成所需電壓矢量,將該矢量施加于SRM。綜合仿真和實驗結果可知,DB-FC算法解決了DTC算法滯環容差問題,實現了SRM的轉矩脈動最小化,計算量小且易于簡單,即使在重載條件下運行,也能保證系統的動靜態性能良好。但它也有局限性,不適合在高速下運行,因為速度過高會導致磁鏈估算不準確。并且相比于傳統DTC方式,磁鏈無差拍算法在提高了磁鏈和轉矩控制的準確性的同時,增大了功率器件的開關頻率。因此,在高速下討論DB-FC是值得期待的。
