基于注意力機制和雙向GRU模型的雷達HRRP目標識別
2019-11-02 03:40:18劉家麒
雷達學報 2019年5期
劉家麒 陳 渤* 介 茜
①(西安電子科技大學雷達信號處理國家重點實驗室 西安 710071)
②(西安電子科技大學計算機科學與技術學院 西安 710071)
1 引言
雷達高分辨距離像(High-Resolution Range Profile,HRRP)是基于雷達寬帶信號獲取的目標散射點子回波在雷達射線方向(Radar line of sight,RLOS)上投影的向量和,它含有大量的目標結構、散射點分布和目標尺寸等可判別信息。相比2維的合成孔徑雷達圖像,1維的HRRP數據存儲量較低,更易保存和計算,如今在雷達自動目標識別(Radar Automatic Target Recognition,RATR)領域中廣泛應用。
HRRP具有方位敏感性、幅度敏感性和平移敏感性[1],這對目標特征的提取造成了困難,而特征提取的好壞又直接影響了目標的識別性能。針對以上問題,大量學者進行了廣泛的研究。文獻[2]提取了HRRP數據的高階譜特征,對所得譜特征使用模板匹配法進行識別。但這需要專業人員的經驗,同時將時序數據映射到了其他域,破壞了HRRP距離單元之間的時序相關性。文獻[3]基于字典學習的方式得到了噪聲環境中HRRP的稀疏表示,并在此基礎上進一步進行處理。文獻[4]使用PPCA對HRRP數據進行特征的提取,用MPPCA按照方位角的不同進行了聚類,從而減少待匹配模板的數量。文獻[5]認為HRRP數據服從混合Gamma分布,將HRRP的識別問題轉化為概率統計模型。文獻[6]使用了原始的復數HRRP數據,充分利用了相位角信息。雖然以上方法都取得了不錯的識別性能,但是這些方法都將HRRP數據視為一個整體,僅關注了樣本的包絡信息,而忽略了HRRP數據內部不同距離單元之間的時序相關性。文獻[7,8]考慮到不同距離單元之間的時序相關性,將HRRP轉化為序列的形式并使用隱馬爾科夫模型(Hidden Markov Models,HMM)建模。但由于方位敏感性的原因,需要對不同幀的數據分幀建模,具有較大的計算量。相比于HMM模型,循環神經網絡(Recurrent Neural Network,RNN)由于其具有非線性的激活函數以及較大的隱空間范圍,具有更強的表示能力。通過其獨特的自循環機制,輸入數據的隱層特征可以在不同時刻的隱狀態間傳遞,可以有效的提取完整的樣本特征。通過梯度下降算法(gradient descent)可以自動學習循環神經網絡模型權矩陣的值,可以在不需要相關人員的先驗經驗的條件下完成數據的特征提取與分類。因此,被廣泛應用于時序數據的建模[9,10]。由于平移敏感性問題的存在,HRRP樣本目標區域兩側均會有一段數據冗余,而冗余數據對目標識別沒有幫助。另一方面,傳統的循環神經網絡是單向的,分類時僅能利用當前及之前時刻的數據信息。另外由于傳統的循環神經網絡存在著梯度消失[11]等問題,使其對歷史數據的記憶能力較差。
針對上述問題,本文提出一種基于注意力機制的雙向門控循環單元(Attention-based Bidirectional Gated Recurrent Unit,ABi-GRU)模型。門控循環單元(Gated Recurrent Unit,GRU)是一種對于循環神經網絡的改進[12],通過在傳統RNN基礎上額外增加“重置門”和“更新門”操作,可以有效的保證可分性信息在網絡自循環中的傳遞,從而緩解梯度消失帶來的性能損失,相比于傳統的循環網絡模型,其記憶性更強。該模型首先使用雙向GRU網絡對HRRP數據的正向序列和反向序列分別建模,得到其正反向序列的隱層特征。再對正反向得到的隱層特征進行拼接,拼接后的隱層特征可以同時利用正反向的內容,有利于目標的識別與分類。最后考慮到不同時刻的樣本數據對識別所起的作用是不同的,使用注意力機制對不同時刻的隱層特征進行加權處理得到最終的隱層,從而使模型可以自動關注并計算對識別有效的目標區域部分,更有利于目標的識別與分類。
最后,通過實測數據進行相關實驗,驗證本文模型的正確性。實驗結果表明,本文模型有效解決了HRRP的平移敏感性問題,具有較高的識別性能。
2 門控循環單元及注意力機制
2.1 門控循環單元
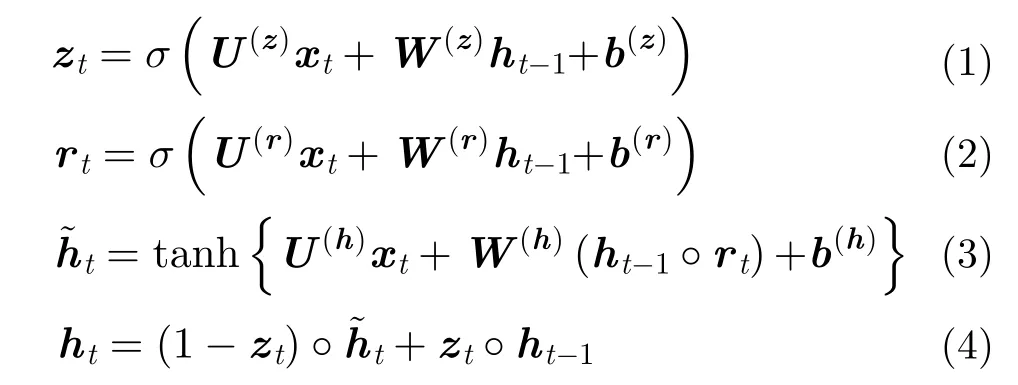
門控循環單元是一種帶有自循環結構的神經網絡,它可以自動對多個時間的輸入進行特征提取,而不同時刻的數據共享同一組權值矩陣。由于其獨特的自循環機制,隱層特征可以在不同時刻間單向傳遞,從而記錄下先前時刻的“歷史數據”,再通過歷史數據與新數據的融合得到當前時刻的隱層特征值。由于傳統的循環神經網絡存在著梯度消失問題[11],進而對識別的性能造成了影響。GRU模型在RNN的基礎上增加了2個控制門結構,使得信息有選擇性的在隱層中傳遞,在記憶重要信息的同時有效的減輕了梯度消失的問題。
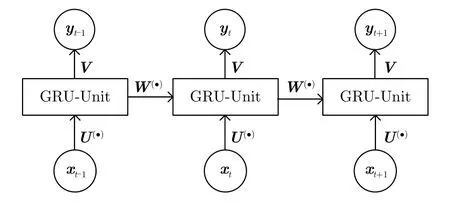
圖1 GRU網絡結構示意圖Fig.1 GRU network architecture

2.2 注意力模型
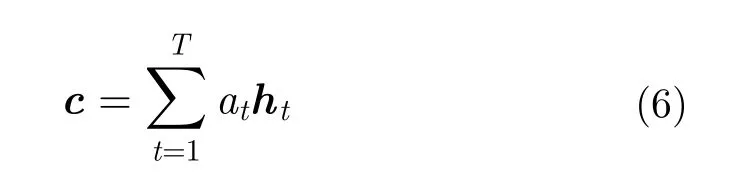
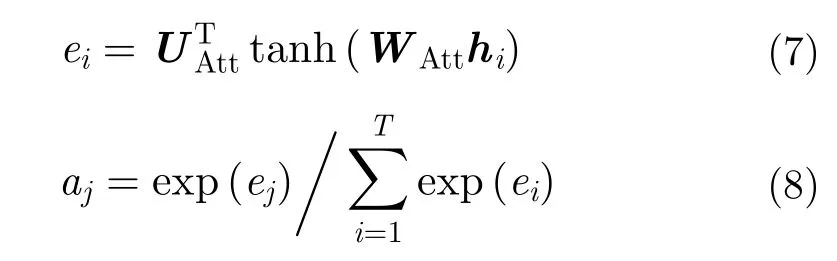
注意力機制(attention mechanism)源自人類大腦對新事物認知的特點,即對于重要的內容分配較多注意力,而對于不重要的部分分配較少的注意力[13]。對目標識別問題來講,目標區域的價值遠遠大于兩側的冗余數據。在GRU模型中,樣本通過滑窗操作后得到多個時刻的樣本序列,不同時刻的序列進行類別預測的重要程度是不同的。這需要通過一種特殊的計算手段自動獲得目標區域的范圍,并對此范圍賦予較大的權值。最后將不同時刻的隱層狀態與權重進行加權求和,從而得到經過注意力模型處理后的隱層狀態
3 基于注意力機制和雙向GRU模型的HRRP目標識別方法
3.1 HRRP數據的預處理
如圖2所示,雷達HRRP數據反映了在一定的雷達視線方向上,目標散射點子回波的分布情況,其中每個距離單元等于所有散射點目標在這個距離單元內的回波疊加。HRRP數據包含了豐富的目標尺寸和相對結構等信息,可用來目標的識別與分類[14]。記HRRP數據為,其中表示第個距離單元的子回波;表示距離單元總個數。對復向量取幅值,得到其幅值向量。
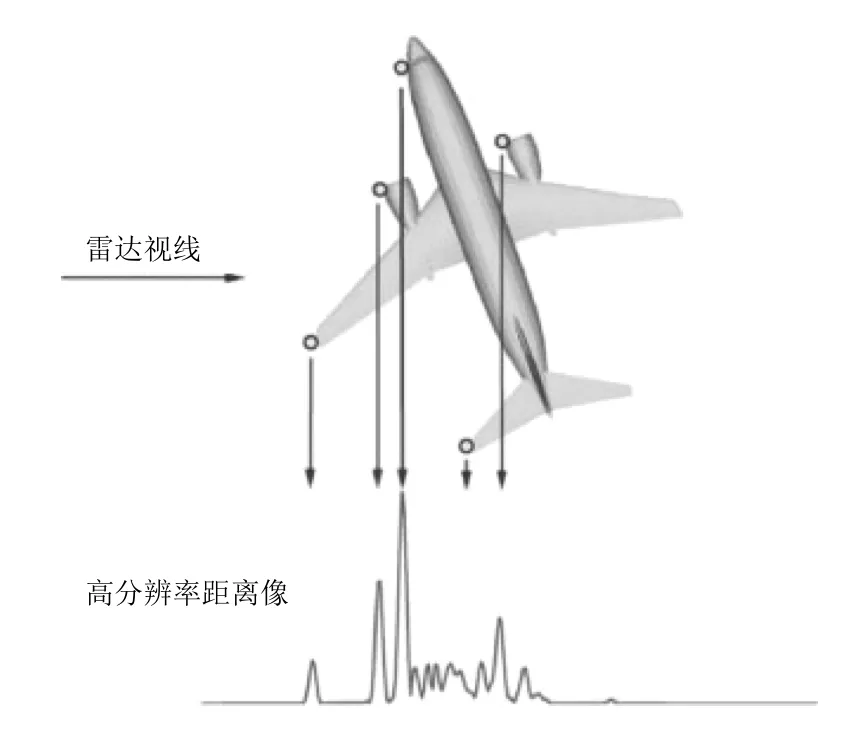
圖2 高分辨距離像生成示意圖Fig.2 Illustration of an HRRP sample
本文使用能量歸一化方法消除HRRP數據的強度敏感性問題,即限制不同HRRP數據的總能量相同。使用重心對齊法消除平移敏感性,將HRRP數據的重心位置平移到距離像的中心位置處。HRRP數據的重心位置可由式(11)計算出。


3.2 基于注意力機制和雙向GRU模型的HRRP目標識別方法
傳統的GRU模型是單向的,即數據只能沿著一個方向進行處理。網絡只能結合當前時刻的輸入數據及之前時刻的隱狀態信息計算新的隱狀態,而之后的信息無法有效的利用。而HRRP本身并無特定的順序,因此只考慮單向信息并不利于HRRP數據的識別。針對此問題,本文提出將雙向GRU模型應用在HRRP序列的識別問題上,即將HRRP數據分正反雙向分別輸入2個獨立的GRU模型,從而得到正反序列的隱層特征分別為和[15],其中表示序列的時刻數。將同時刻的隱層進行拼接,則拼接之后的隱層可以充分利用前后兩個方向上所有時刻的HRRP信息,有利于特征提取的進行。

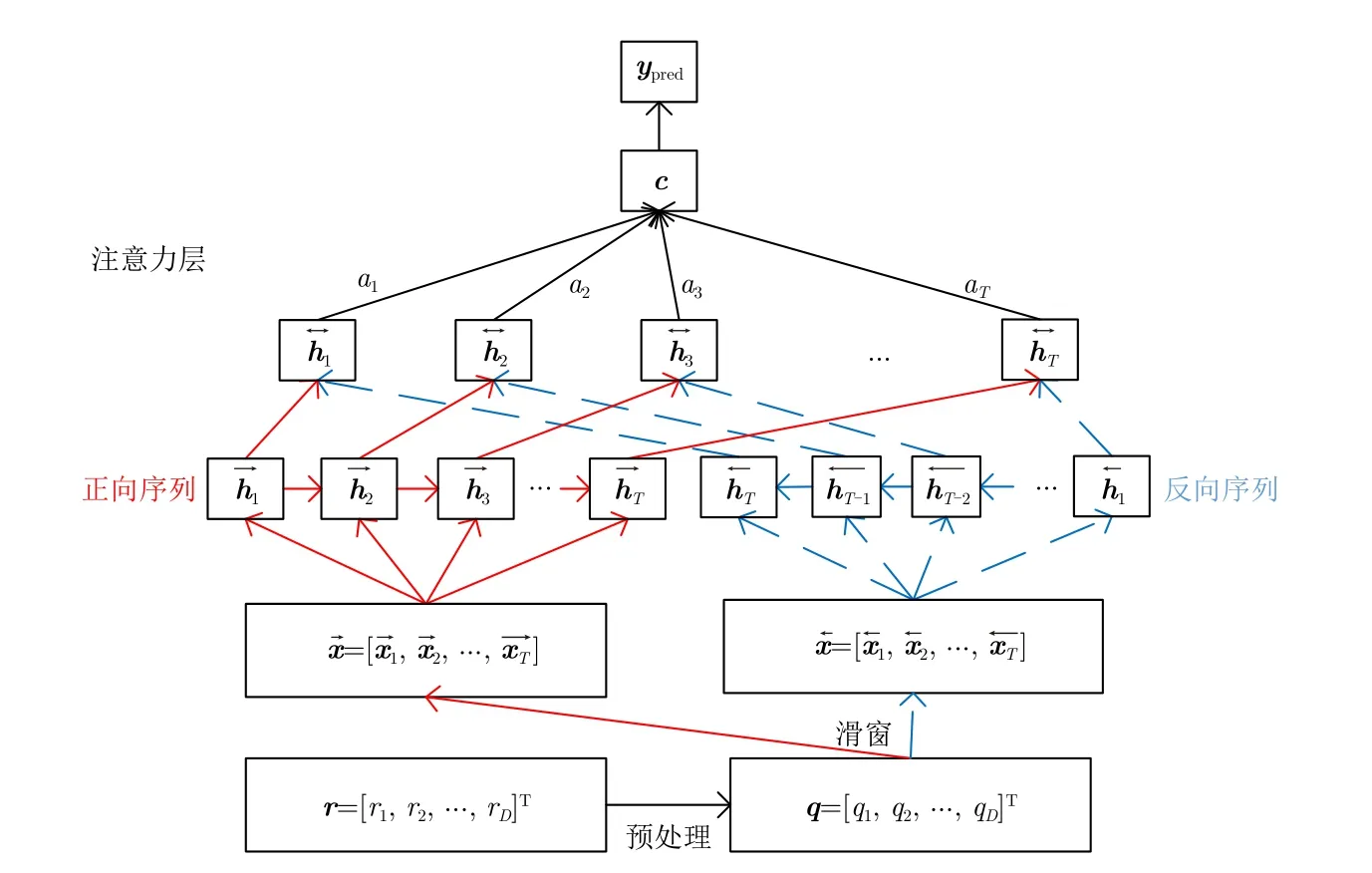
圖3 基于注意力機制的雙向門控循環單元(ABi-GRU)模型結構Fig.3 Structure of ABi-GRU model

4 實驗
實驗數據為國內某研究所雷達實測飛行數據,其中雷達和飛機的參數如表1所示。所測數據共含有3類目標飛機,其時域特征如圖4所示。其中“安26”為中型螺旋槳飛機,“獎狀”為小型噴氣式飛機,“雅克42”為中型噴氣式飛機。其飛行軌跡圖如圖5所示。為了考慮盡可能完備的方位角數據,本文將飛機飛行軌跡分為數段,其中“安26”和“獎狀”分為7段,“雅克42”分為5段。為了驗證模型的普適性,本文選取方位角變化較大的幾段作為訓練數據,其他數據段作為測試數據。因此本文使用“安26”的第5,6段數據,“獎狀”的第6,7段數據,“雅克42”的第2,5段數據作為模型的訓練數據,其它段作為測試數據。以上訓練數據段基本覆蓋了測試數據可能的方位角信息,而且與測試數據段無重復數據,可以有效驗證模型的性能。共得到7800個訓練樣本數據,5124個測試樣本,每個距離像維度D為256維。
表2展示了本文提出的模型與多個現有模型對測試數據的識別性能,識別性能指分類正確的樣本占全體測試樣本的比例。現有模型包括:最大相關系數法[7](Maximum Cross Correlation,MCC),全連接神經網絡(Full Connected Neural Network,FCNN),自適應高斯分類器[16](Adaptive Gaussian Classifier,AGC),隱馬爾科夫模型。除此之外,為了驗證雙向網絡和注意力機制的有效性,還加入了融合注意力機制和僅用正向或反向數據的單向GRU模型(AGRU-for,AGRU-back)和無注意力機制的雙向GRU模型(Bi-GRU)作為對比。在實驗中,設置滑窗的窗長d為32,每次滑動的距離為16,經過預處理后的高分辨距離像的維度為256,可計算得到總的序列數為15。GRU網絡的隱層狀態的維度大小為20,注意力權值的長度l為12。待訓練的參數包括,其中帶方向箭頭的變量表示正向或反向GRU網絡的相關權值,是注意力機制的相關參數,是最終融合注意力機制和雙向信息的隱層狀態所經過分類器的相關參數。初始化時,所有待訓練參數均從分布中采樣。學習率設置為,表示迭代次數。使用交叉熵作為模型的損失函數,其定義為L=其中是第i個樣本真實的類別向量(one-hot編碼),是第i個樣本網絡預測的輸出分布向量。采用隨機梯度下降法對網絡進行權值的訓練,每次使用的mini-batch樣本數設置為30。

表1 雷達和飛機相關參數Tab.1 Parameters of planes and radar
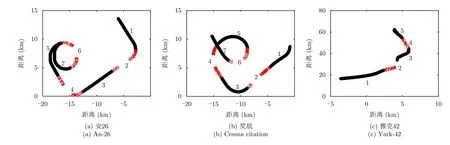
圖5 實驗數據飛行軌跡投影圖Fig.5 Projections of target trajectories onto the ground plane

表2 不同方法實驗識別性能對比Tab.2 Performance comparison with different methods
從表2中可以看出,相比于傳統的全連接神經網絡模型,基于循環結構的GRU模型考慮到了高分辨距離像內部不同距離單元之間的時序相關性,從而有效的提高識別性能。而結合了雙向信息的Bi-GRU由于在任一時刻考慮到了樣本的整體信息,比僅僅使用部分正向或反向序列的AGRU-for和AGRU-back模型性能更好。基于注意力機制的ABi-GRU模型則在考慮到雙向時序性的前提下,又引入了注意力機制。在考慮樣本整體信息的情況下,數據的目標區域含有最為豐富的可判別信息,因此是模型識別的重點區域。而引入注意力機制后的模型可以自動的對目標區域賦予較大的權值,增加了目標區域的權值比重。識別性能相比無注意力機制的Bi-GRU模型又提高了0.7%,取得了最佳的識別性能。
圖6給出了經預處理后的時域HRRP數據和經本模型(ABi-GRU)所提取得到的隱層特征的主成分分析(Principal Component Analysis,PCA)2維投影圖。從中可知,ABi-GRU模型所提取到的隱層狀態具有很高的可分性,所提特征整體可分性較好,投影圖中只有部分紅色星號(安26)與綠色圓圈(獎狀)有重疊現象。
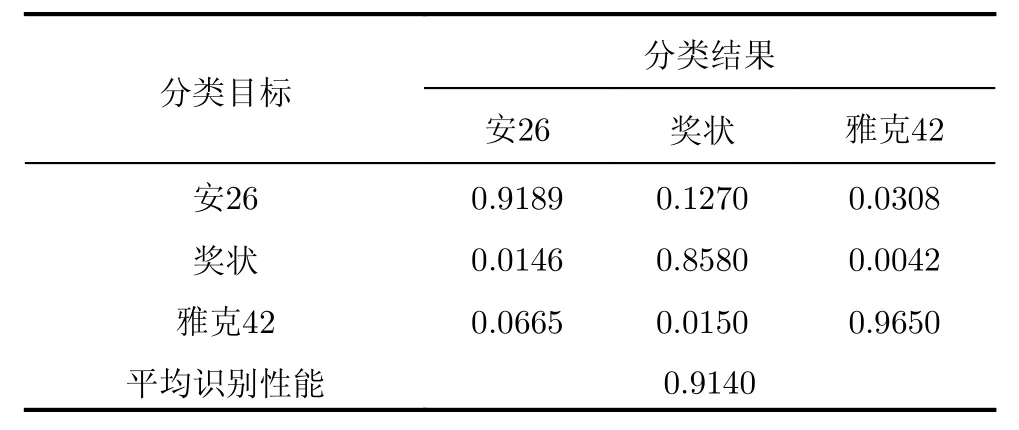
表3 ABi-GRU模型對時域HRRP數據的混淆矩陣Tab.3 Confusion matrix of ABi-GRU model for time domain HRRP data
圖7展示了不同樣本不同時刻的注意力系數分配圖。其中橫軸表示不同的時刻,縱軸表示不同的樣本,不同顏色代表著不同的注意力數值。對經過重心對齊處理的HRRP數據來說,1~5時刻和12~15時刻對應時域HRRP數據目標區域兩側的噪聲區域,這部分數據不具備目標識別能力,因此其對應的注意力權值較低。而6~11時刻為數據的目標區域,這部分區域包含有大量目標結構信息,因此是目標識別的重點。圖7(a)是已經經過重心對齊處理后樣本的注意力系數圖,可見較大的權值基本分布在中間時刻(時刻7~9)附近,這與實際情況相符。注意力機制可以自動找出目標區域,有效提高了識別性能。
平移敏感性問題會對模型性能造成一定影響,但是注意力機制是數據相關的。當輸入數據發生平移移動時,注意力系數會自動修正相應的權值。在模型已經訓練完成的情況下,將測試數據整體平移一定的距離單元,此時HRRP數據的目標區域將不在位于6~11時刻所框定的范圍內。如若將經過重心對齊后的HRRP數據整體向前平移50個距離單元并將其輸入已訓練好的模型中,可得此時的注意力系數如圖7(b)所示。可見雖然距離像平移了一定單位,但是相對應的注意力權值也發生了變化,且此時注意力權值較大的區域與目標區域的位置依然吻合,模型依然可以有效從整個HRRP數據中提取目標區域并得到其隱層特征,可見基于注意力機制的雙向GRU模型對于HRRP的目標識別非常穩健。
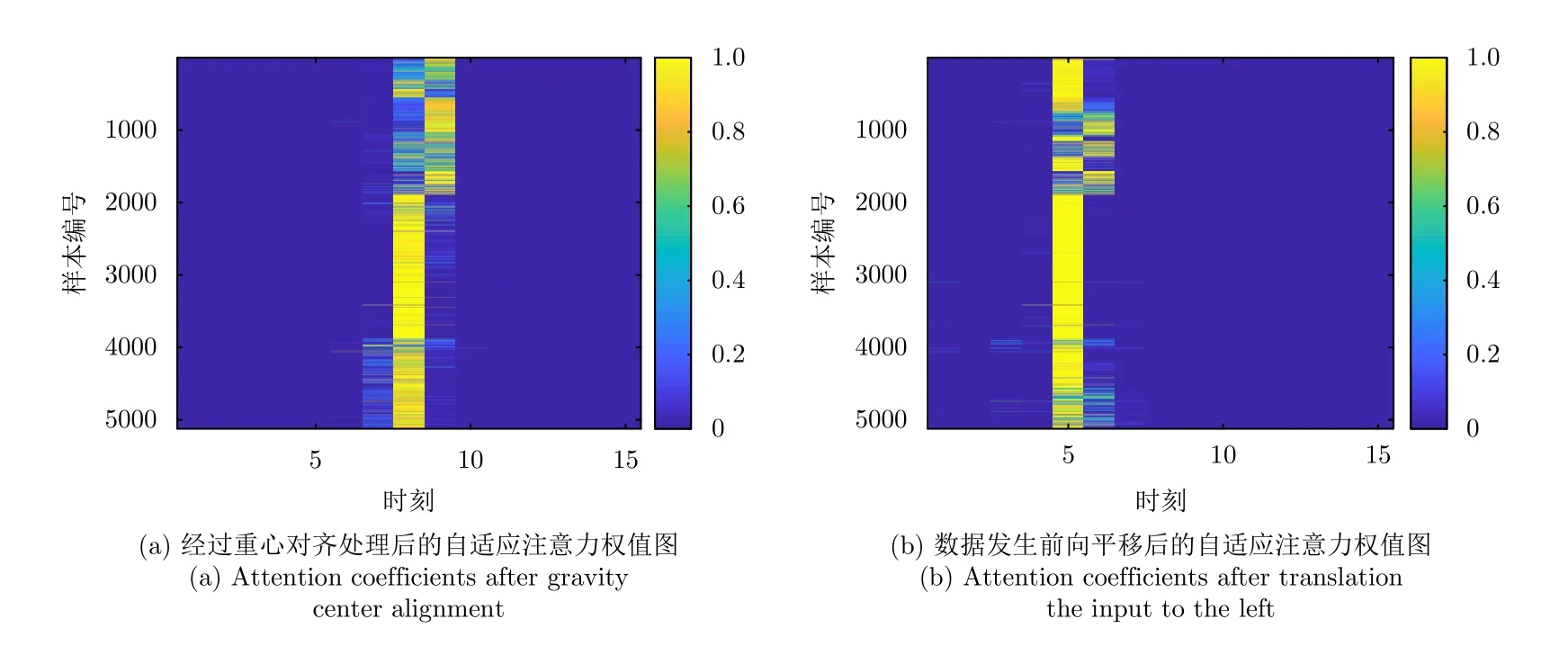
圖7 測試數據注意力權值系數Fig.7 Attention coefficients of test data
5 結論
本文針對雷達高分辨距離像的自動目標識別問題,提出了一種基于注意力機制的雙向GRU網絡的識別模型。基于GRU模型的循環機制,充分利用了高分辨距離像內部距離單元之間的時序相關性,有效捕捉了HRRP數據深層的隱含特征,提高了特征提取的效率與質量。并在此基礎上引入了注意力機制,有效地從距離像中獲取得到目標區域,降低了特征提取的難度。實驗結果表明,本文模型可以有效地捕獲HRRP數據的可分性信息,以及處理高分辨距離像的平移問題,而且不需要專業人員的先驗經驗,取得了較好的識別性能。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
四川勞動保障(2021年9期)2022-01-18 05:11:08
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
文苑(2018年21期)2018-11-09 01:23:06
中國衛生(2016年9期)2016-11-12 13:28:08
光學精密工程(2016年6期)2016-11-07 09:07:19
中國衛生(2015年9期)2015-11-10 03:11:12
核科學與工程(2015年4期)2015-09-26 11:59:03
中國衛生(2014年3期)2014-11-12 13:18:12
