基于導航衛星的干涉SAR數據采集策略優選方法分析
2019-11-02 03:40:30張凌志劉飛峰
雷達學報 2019年5期
張凌志 劉飛峰 胡 程
(北京理工大學信息與電子學院雷達技術研究所 北京 100081)
(衛星導航電子信息技術教育部重點實驗室(北京理工大學)北京 100081)
1 引言
基于導航衛星的雙基地SAR(Bistatic Synthetic Aperture Radar based on Global Navigation Satellite System,GNSS-BSAR)是空-地雙基地SAR中一種典型的應用[1],使用在軌的導航衛星作為發射源,地面部署接收機(地基、車載、機載)構成雙基地SAR系統[2]。由于導航星座的日趨完善,其全球覆蓋性以及重軌特性所帶來的優勢是其他照射源暫時所不能替代的,其中以地基接收機為主的導航衛星干涉合成孔徑雷達(Interference Synthetic Aperture Radar based on the Global Navigation Satellite System,GNSS-InSAR)在場景形變監測領域有著廣闊的應用前景[3],成為了近年來研究熱點。
在GNSS-BSAR系統成像方面,已有研究者分別使用不同的導航衛星星座進行了成像驗證,包括了北斗[4,5]、GPS[6]、格洛納斯[7]、伽利略[8]。除此以外文獻[9]還提出了多角度融合方法以增強圖像信噪比。在形變監測方面,來自伯明翰大學的學者們[10]使用直達波天線,配合長約50 m的線纜構建了理想點目標,并使用格洛納斯作為發射源,首次實現了精度約為1 cm的1維形變反演結果。該實驗初步驗證了GNSS-InSAR應用于形變監測的可行性。為了進一步驗證場景形變監測的可能,2017年文獻[11]通過對接收機進行高精度移位來模擬場景建筑形變,成功反演出了形變,精度約為1 cm。在3維形變方面,2018年北京理工大學的技術團隊[12]通過人為構建轉發器,進行了精度可控的強點目標形變模擬,使用我國的北斗IGSO衛星,成功實現了精度優于5 mm的3維形變反演,這些驗證性實驗充分表明了GNSS-InSAR應用于場景形變檢測的可能。
若要實現GNSS-InSAR場景的3維形變反演,需要同時至少3顆衛星從不同角度照射場景。由于GNSS-InSAR系統的拓撲高度非對稱性以及導航信號的窄帶特性[13],加上導航衛星的重軌并非是嚴格意義上的重軌,除了不可避免的空間基線外,重軌時間也并非嚴格一致,因此在實際數據采集中,需要對系統構型以及數據采集時間進行嚴格的優化設計。文獻[14]提出了一種聯合優化方法,解決了面向大場景下的多星多角度構型優化問題,配合多個接收機實現綜合分辨性能優異的大場景成像。文獻[15]提出了空間去相干的理論描述框架,表明了空間去相干在GNSS-InSAR中的必要性,但未對數據采集時間進行說明。從當前實際情況出發,不精確的數據采集時間可能會造成存儲資源浪費,空間去相干導致的數據截取進一步降低了數據有效性。具體如圖1所示:
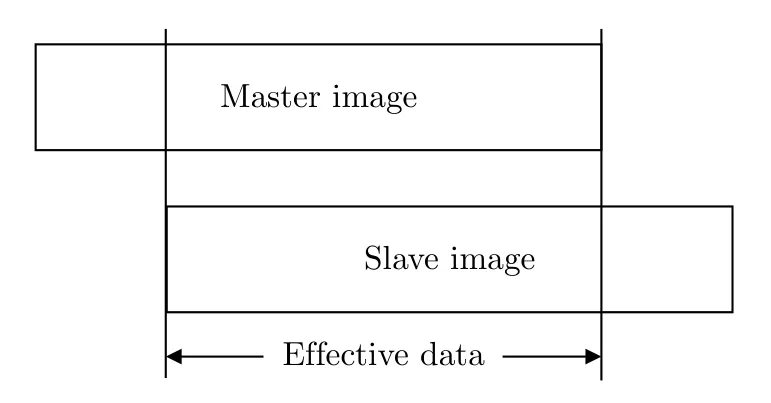
圖1 數據截取與有效數據示意圖Fig.1 Effective data interception diagram
針對上述問題,本文提出了一種GNSS-InSAR場景連續數據采集優化方法,通過結合當前數據的衛星軌跡和兩行星歷數據文件(STK Two-Line Element sets,TLE)預測軌跡,基于相干系數軌跡對齊,獲取衛星重軌時間間隔,得到最優的數據采集策略,從源頭上降低數據的空間去相干性,提升所采集數據有效性,節約存儲資源。在第2部分對GNSS-InSAR場景數據采集優化方法進行了詳細介紹。第3部分針對提出的方法進行了實驗設計,開展了實測數據采集,并針對采集的數據進行了初步分析。第4部分對全文進行總結。
2 GNSS-InSAR場景數據采集優化模型
2.1 GNSS-InSAR相干系數理論模型
對于GNSS-InSAR圖像而言,經過保相成像處理后,場景中任意一點(x0,y0)的像素信息分別對應分辨單元內所有散射體回波的相參疊加,可建模為
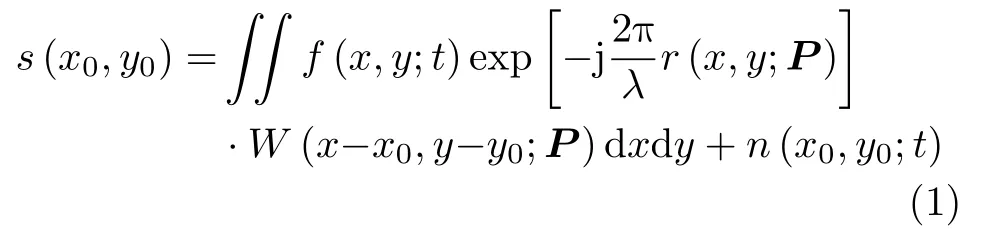
其中,f(x,y;t)為時間t下的地表散射系數,P為對應的合成孔徑中心位置矢量,W(x,y;P)表示系統的點擴散函數(PSF),n(x,y;t)為圖像的加性噪聲。對于SAR圖像的同名點像素,其相干系數可表示為[16]

其中,下標m表示主圖像,s表示輔圖像。根據柯西不等式可以判斷:0≤ρ ≤1,當ρ=0時表示同名點完全不相干,當ρ=1時,同名點完全相干。
將點目標像素模型式(1)帶入到式(2)并化簡得到
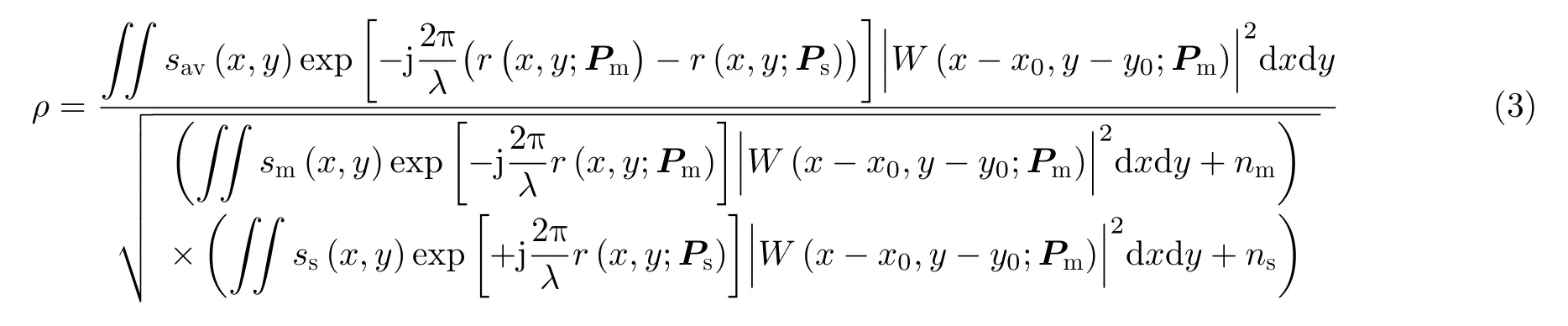
式(3)的推導使用了如下近似:
(1)由于導航衛星的高軌道特性,使得W(x-x0,y-y0;Pm)≈W(x-x0,y-y0;Ps)成立;
(2)相鄰兩天的噪聲相干系數為0,即

(3)相鄰兩天的目標散射系數為sav(x,y),即

對式(3)中的相干系數ρ進一步分解得到

其中,熱噪聲相干系數ρth與時間相干系數ρti分別由系統與實際目標決定。
對于PS點[17]而言,地表散射系數相對穩定,不隨時間變化,同時為了便于后續分析,假定散射系數為1得到空間相干系數ρsp的簡化式為

從式(7)推導結果可以知道,空間基線主要是影響r(x,y;P)從而導致空間去相干。
2.2 數據采集優化模型
導航衛星的重軌時間并非穩定不變,因此需要對數據采集時間進行有效預測,從源頭上降低空間去相干,提高數據有效性。
假定主圖像數據采集時間為tm,該采集時間可以通過文獻[14]中的廣義優化模型進行求解,輔圖像數據采集時間為ts=tm+?t,?t為時間間隔,那么最優化數據采集模型可通過式(7)推導而來

第1天數據采集需要進行實驗設計以確定最優數據采集時刻,往后的重軌天數據采集可以根據數據采集優化模型,同時結合星歷文件進行預測。整體的預測流程如圖2所示,n為任意一天采集的數據,k為重軌天數間隔。
實際衛星位置對應的實際時間設為tn,經過模型優化得到的時間偏差為 ?t,那么第n+k天對應的實際數據采集時間可表示為

3 實驗驗證
3.1 GNSS-InSAR場景3維形變反演實驗設計
對于固定場景的形變監測,首次數據采集的時候需要嚴格設計系統構型,使分辨率達到最優化。本次實驗接收機部署在北京理工大學信息科學試驗樓樓頂西北角,實施監測場景位于西偏北30°。使用理論分辨率計算公式[18]對該場景進行分辨率設計。仿真參數具體參見表1。
以分辨單元面積作為判定依據,得到預定采集日期當天全時段下各個衛星在預定場景下所能得到的分辨單元面積如圖3所示。
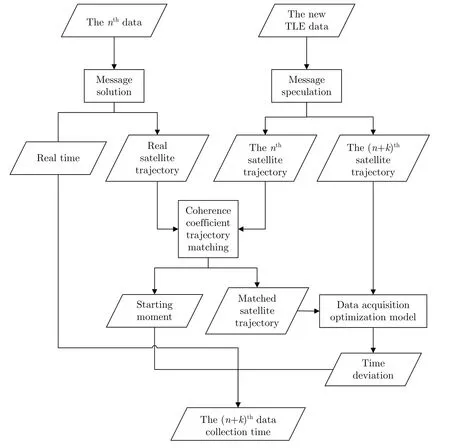
圖2 GNSS-InSAR數據采集時間優化流程Fig.2 Time optimization process of GNSS-InSAR data acquisition
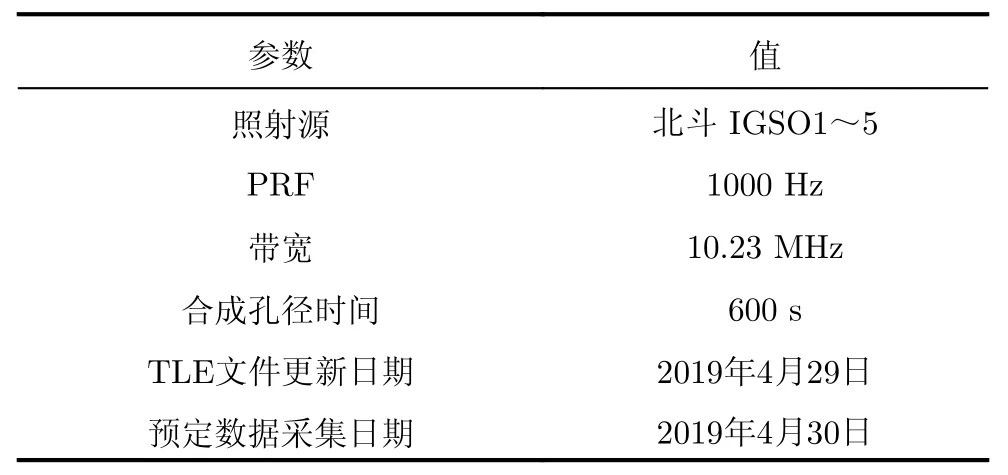
表1 數據采集試驗仿真參數Tab.1 Data acquisition test simulation parameters
為了實現3維形變反演,需要同一時間下有3顆衛星對場景進行照射。圖3中10點前后與17點前后滿足當前場景上空有3顆IGSO衛星可見的條件。更進一步,為了使分辨單元面積達到最優,可以得到具體的數據采集時間。具體如圖4紅框標注,分別是9點30分前后與17點30分前后。
為了配合實驗,在場景布置轉發器,整體的系統構型如圖5所示。
3.2 重軌數據采集時間優化
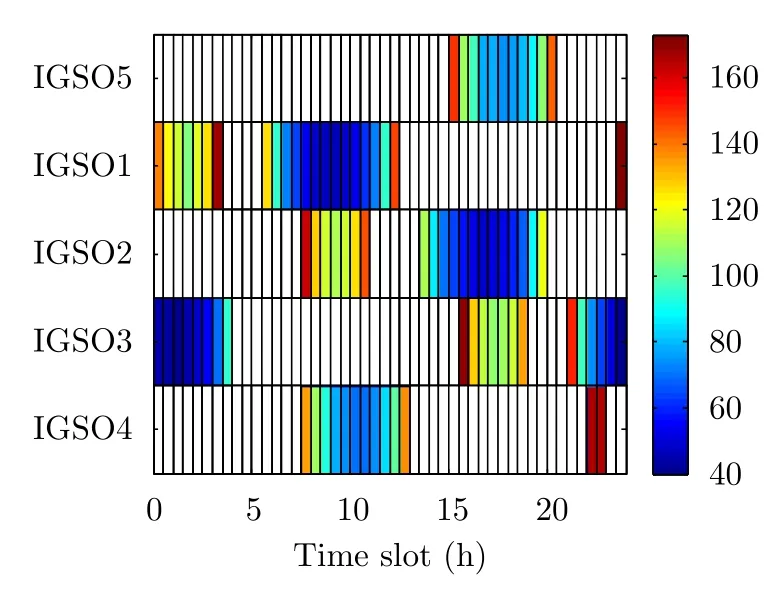
圖3 全時段下場景分辨單元面積Fig.3 Scene resolution unit area in full time
以2019年4月30日采集的實測數據作為第n天數據,對于北斗的IGSO而言,重軌時間約為1天,即m=1,同時下載當天最新的TLE文件。以IGSO1為例,結合圖2進行詳細說明:
(1)使用實測數據的直達波進行衛星位置解算,同時根據TLE文件推算當天和相鄰天的衛星軌跡。經過相干系數軌跡匹配之后,得到的軌跡如圖6所示。
(2)以匹配得到的TLE衛星軌跡作為參考,對重軌天的TLE衛星軌跡進行數據采集優化模型求解,系統的PSF與優化模型仿真結果分別如圖7與圖8所示。
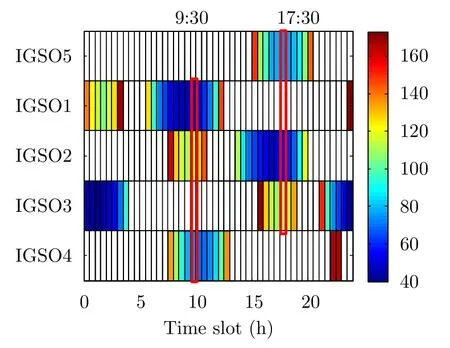
圖4 首次數據采集時間設計結果Fig.4 Design results of first data acquisition time
對圖8的結果分析可知,第1個峰值點為其本身,由于空間基線為0,相干系數為1。第2個峰值點相干系數為0.999644,滿足除了第1個峰值點外相鄰天相干系數最大值條件,因此第2個峰值點就是最佳重軌時的空間相干系數。此時經過模型優化得到的時間間隔為:?t=86163 s=23 h 56 min 3 s,結合第1天的實測數據軌跡對應的時間t1=9 h 26 min 0 s,第2天準確的數據采集時間為:t2=9 h 22 min 3 s。
3.3 結果分析
為了說明優化結果的正確性,在實驗場景中放置轉發器模擬理想點目標(圖5),同時按照優化后的時間進行5月1日數據采集。實際采集時間為9 h 21 min 53 s,總采集時間約650 s。相鄰兩天的空間相干系數軌跡匹配結果如圖9所示。
從圖9中峰值點位置來看,重軌數據采集優化模型得到的結果和實際結果相吻合。為了進一步說明,圖10給出了IGSO1衛星實測數據成像結果。
對相鄰兩天的圖像相干系數進行求解,得到圖11所示結果。在同一坐標系下,仿真目標位于[–147,20,0],空間相干系數為0. 999644;轉發器位于[–147,20,0],相干系數為0.9996;兩者的相干系數基本保持一致。
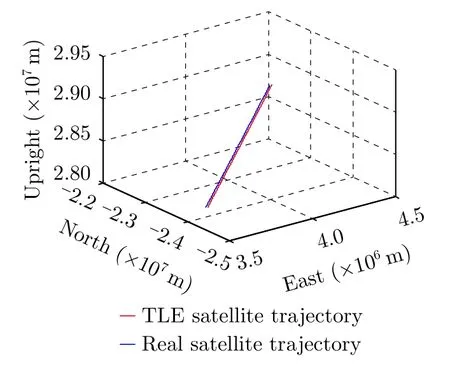
圖6 對齊后的TLE衛星軌跡與實測數據衛星軌跡Fig.6 Aligned TLE satellite trajectory and measured data satellite trajectory
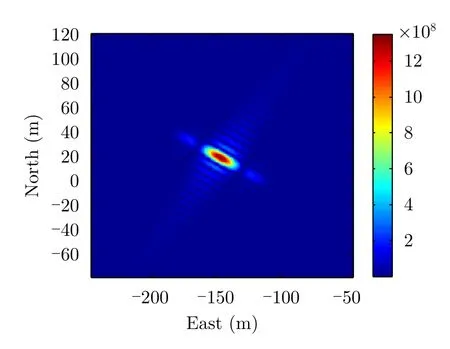
圖7 場景[–147,20,0]處理論PSFFig.7 Theoretical PSF in scene at position of [–147,20,0]
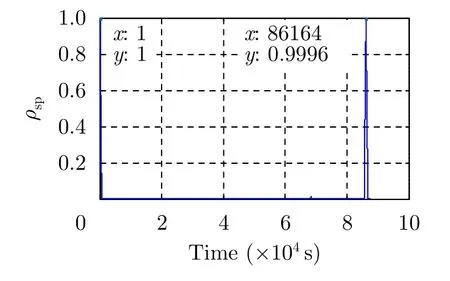
圖8 數據采集優化模型仿真結果Fig.8 Simulation results of data acquisition optimization model
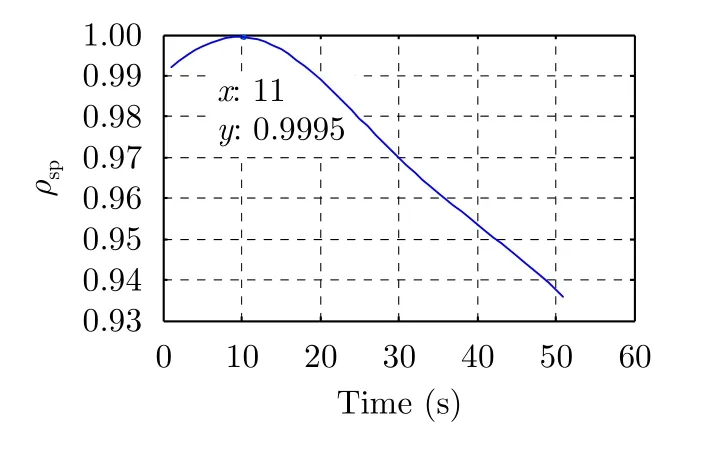
圖9 實測數據重軌空間相干系數Fig.9 The spatial coherence coefficient of measured data
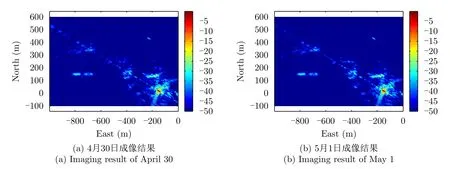
圖10 場景成像結果Fig.10 Imaging results of scene
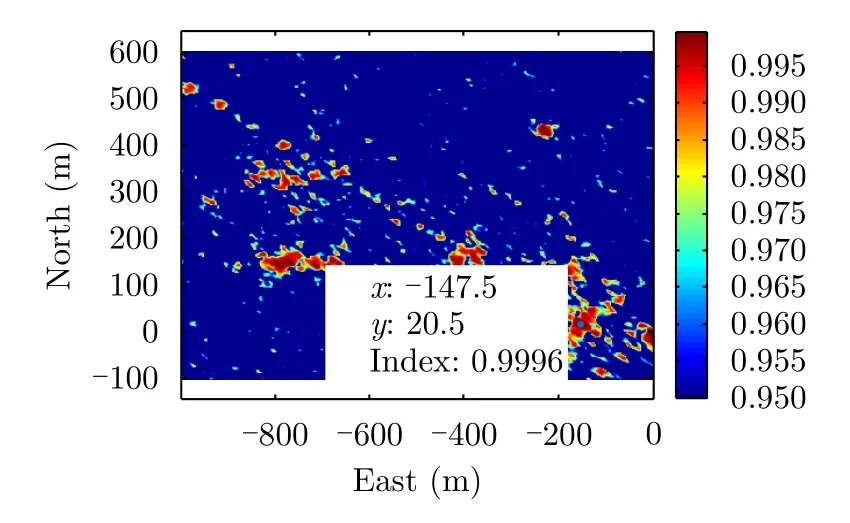
圖11 相干系數結果Fig.11 Coherence coefficient result
圖9與圖10的結果表明經過數據采集優化模型后得到的時間間隔與實際衛星軌跡的重軌時間相互吻合,在保證600 s預期合成孔徑時間下,可以最大限度減少數據采集時間,節約存儲資源。同時避免后期由于數據對齊帶來的數據有效性降低問題。
4 結論
在GNSS-InSAR場景1維/3維形變反演應用中,針對由于導航衛星重軌時間的非嚴格一致性與有效數據截取帶來的數據冗余,數據有效性低等問題,本文提出了一種面向GNSS-InSAR場景數據采集的優化模型,采用實測數據與TLE文件相結合,根據當天數據采集時間,預測相鄰天重軌時間,從而實現精確的數據采集。實測數據驗證結果表明了數據采集時間優化模型的正確性。該方法的提出有利于GNSS-InSAR場景1維/3維形變反演實驗的開展,在降低原始數據冗余度基礎上,保證了有效數據時間長度大于預期合成孔徑時間。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
