嫦娥四號著陸器定向中繼鏈路指向及盲捕策略
2019-11-11 01:26:54張婷趙洋楊眉李飛
航天器工程 2019年4期
張婷 趙洋 楊眉 李飛
(北京空間飛行器總體設計部,北京 100094)
嫦娥四號任務是人類首次月球背面軟著陸的探測任務[1-2],嫦娥四號探測器與中繼衛星之間的中繼鏈路是任務實施的關鍵環節。
嫦娥四號中繼衛星位于地月L2點的平動點軌道,著陸于月球背面的著陸器與巡視器,由于受到月球遮擋,對地球處于不可見狀態。上行遙控及下行遙測(科學數據)無法對地直接傳輸,只能通過與中繼衛星之間的前/返向測控數傳鏈路進行傳輸,與地面系統進行數據交互。早在20世紀70年代,Farqubar[3]就提出了發射一顆中繼衛星至地月L2點Halo軌道以支持月球背面載人任務的設想;2011年,美國Artemis任務的兩個航天器首次進入L1/L2平動點軌道進行探測;近年來,我國也分別在2011年的嫦娥二號擴展任務中和2014年的嫦娥五號試驗星中,開展了日地系L2點和地月系L2點軌道試驗。美國國家航空航天局(NASA)等航天機構也在近年開展了很多以月球或其他天體為探測目標的中繼通信衛星相關工作。
中繼定向通信鏈路是嫦娥四號著陸器對“鵲橋”中繼衛星通信的關鍵通信鏈路,承擔著著陸器著陸月球背面后,對中繼衛星的返向數據傳輸任務。如何保證著陸器上定向天線對中繼衛星的精確指向,以確保定向通信鏈路的可靠不丟失,是嫦娥四號定向中繼鏈路設計中需要重點解決的問題。本文結合嫦娥四號月背中繼通信任務需求,對中繼定向通信鏈路天線指向控制策略及鏈路丟失后盲捕方案的設計和在軌驗證情況進行了介紹。
1 任務分析及特點
嫦娥四號任務中,探測器著陸于月球背面,不能直接對地球通信,只能通過與“鵲橋”中繼衛星之間的通信鏈路,間接實現與地球測控站的通信。著陸月球背面后,著陸器、中繼衛星及地面站之間的中繼通信鏈路規劃如圖1所示[4]。
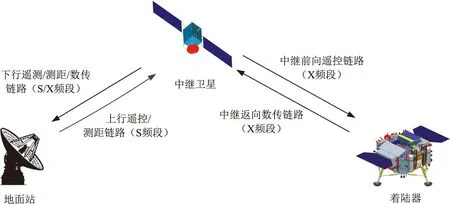
圖1 嫦娥四號著陸器中繼通信鏈路規劃
在月面工作期間,著陸器通過器上全向天線接收中繼衛星轉發的前向遙控信號;著陸器的返向數傳信號(含遙測及科學探測數據)通過著陸器的全向天線及定向天線發送,中繼衛星通過星載4.2 m大口徑天線接收和發送。
在嫦娥三號任務中,著陸器在月球正面著陸后,定向天線展開后即指向地球。定向天線對地指向的控制由地面根據測定軌結果進行計算,通過地面站指令或數據注入,開環控制其轉動方向,以使地面站能夠迅速捕獲著陸器下行鏈路。如在對地指向過程中出現故障,則由地面結合著陸器遙測參數及地面站接收到的衛星下行信號,進行判別,并進入盲捕程序。對于盲捕過程的判定及相關操作,在嫦娥三號任務中,主要依賴于地面站頻譜儀、基帶等設備以及地面站操作人員進行監視及初步定位,配合進行對探測器信號的搜索捕獲。
在嫦娥四號任務中,著陸器定向天線波束的指向對象為中繼衛星而非地球,需結合中繼衛星的運行軌道及實時位置、姿態等計算并控制著陸器天線的實時波束指向方向。在定向天線波束的指向過程中,由于著陸器本身著陸位置及姿態誤差、中繼衛星的軌道測量誤差以及定向天線自身指向控制偏差等問題,都可能導致中繼鏈路的丟失。同時,由于中繼鏈路時延大,導致的中繼鏈路捕獲困難、效率低等問題,均需通過盲捕操作來實現鏈路的重捕獲。與嫦娥三號任務中對地通信不同的是,盲捕過程中,無法及時通過地面接收設備等輔助設備進行判別及輔助操作,需通過中繼衛星對定向天線信號進行捕獲和識別。
2 中繼鏈路指向概述
2.1 著陸器與中繼衛星空間位置
嫦娥四號中繼衛星“鵲橋”的使命軌道為地月系L2平動點軌道。地月系L2平動點位于地月連線的延長線上,距月球距離約6.5~7.9萬千米。由于地月距離是變化的,L2點距離月球的距離也是變化的,變化周期和月球軌道周期一致。圖2為L2點軌道示意圖。L2平動點軌道始終對準月球背面,同月球一起圍繞地球公轉,中繼軌道約14天運行一個周期,平均角速度約1(°)/h,角速度變化緩慢。
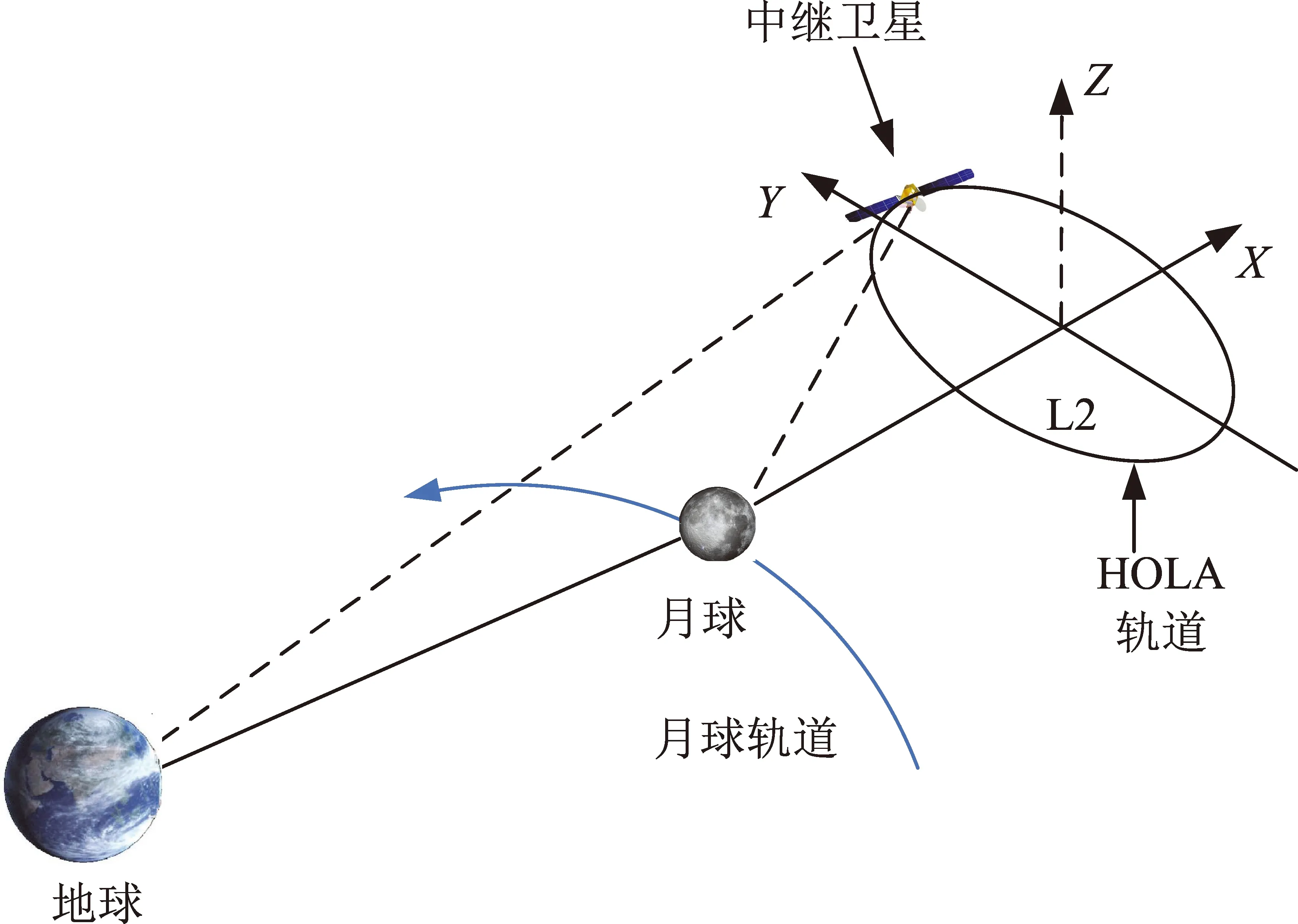
圖2 中繼衛星地月L2平動點軌道示意圖
2.2 著陸器及中繼衛星定向天線指向概述
嫦娥四號著陸器定向天線在繼承嫦娥三號設計的基礎上,在天線波束設計中,充分考慮了對地球站及中繼衛星的覆蓋性[5-6]。在中繼衛星發射前,針對2018年5月、6月不同發射窗口的中繼衛星軌道,綜合考慮著陸姿態偏差,以及主、備著陸區的不同約束后,對著陸器指向中繼衛星的在軌最大指向范圍進行了計算。著陸器對中繼衛星中繼鏈路的指向范圍最大出現在一個橢圓范圍內,將此范圍定義為定向天線的雙軸轉動范圍。經綜合分析,通過一定的指向控制策略,通過地面控制著陸器定向天線定時間隔轉動,應確保能夠使天線指向中繼衛星。
中繼衛星星載定向天線尺寸較大,天線自帶驅動機構質量代價太大,因此,中繼衛星定向天線不配置雙軸轉動機構,而是通過地面注入的軌道參數,由星上導航、制導與控制(GNC)系統進行軌道外推,調整整星姿態指向著陸器,在任務期間,確保中繼衛星對月定向天線能夠實時覆蓋著陸器。同時也避免了復雜的定向天線捕跟系統,大大簡化了中繼系統的設計。
3 定向天線概述及指向精度分析
3.1 定向天線概述
嫦娥四號著陸器定向天線安裝于著陸器上艙頂板,在探測器發射段、飛行段及動力下降段均處于壓緊狀態。著陸月球表面后,定向天線完成解鎖并指向中繼衛星方向[7-8]。在整個在軌任務期間,實時完成對中繼衛星的捕獲跟蹤及實時指向,以保證期間通信鏈路的正常實現。
圖3為定向天線在著陸器上壓緊安裝位置。圖4為在軌“玉兔二號”巡視器所拍攝的著陸器,定向天線正在指向中繼衛星方向。

圖3 定向天線在著陸器上安裝位置
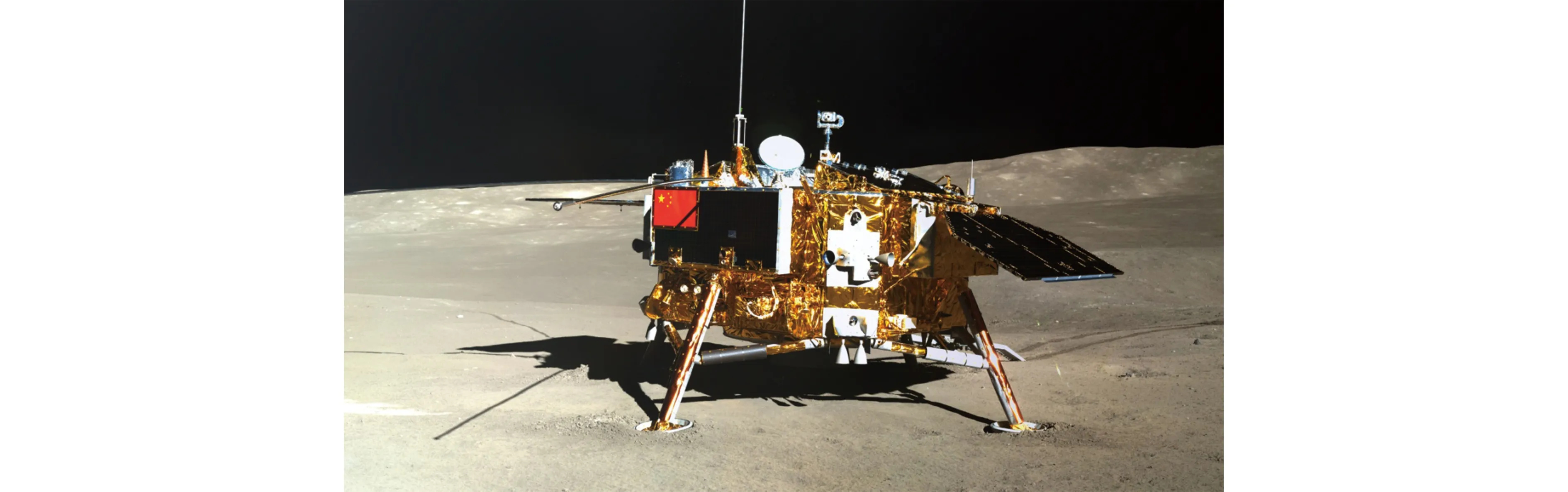
圖4 定向天線在月球背面指向中繼衛星(巡視器拍攝)
3.2 天線指向精度分析
制定天線指向控制策略,必須考慮天線在指向過程中各個環節的誤差,并分析這些誤差對指向角度的影響[9]。在計算嫦娥四號著陸器定向天線對中繼衛星的指向時,需結合兩器位置誤差、對天線的控制誤差以及各器的時差誤差等各因素進行分析及計算。著陸器對中繼衛星的指向精度主要包括:著陸器及中繼衛星的位置誤差、測量誤差、星歷誤差等,定向天線自身由于雙軸驅動機構特性及拋物面的熱特性,也存在一定的誤差影響指向精度。結合本次任務,對天線指向精度進行分解說明,如圖5所示,根據圖5可簡要分析構成誤差的各部分因素。
1)測量誤差對指向影響
測量誤差主要包括定向天線的零位基準誤差δ1(安裝精測后得到)、著陸器的位置測量誤差δ2(由動力下降段GNC敏感器外推信息及降落相機拍攝結果的地形匹配得到)、中繼衛星的位置誤差δ3(地面測定軌測量誤差)以及著陸器的姿態誤差δ4(GNC測量誤差)等。經分解,由測量誤差導致的天線對中繼衛星的指向誤差σ1=δ1+δ2+δ3+δ4≈1.5°。
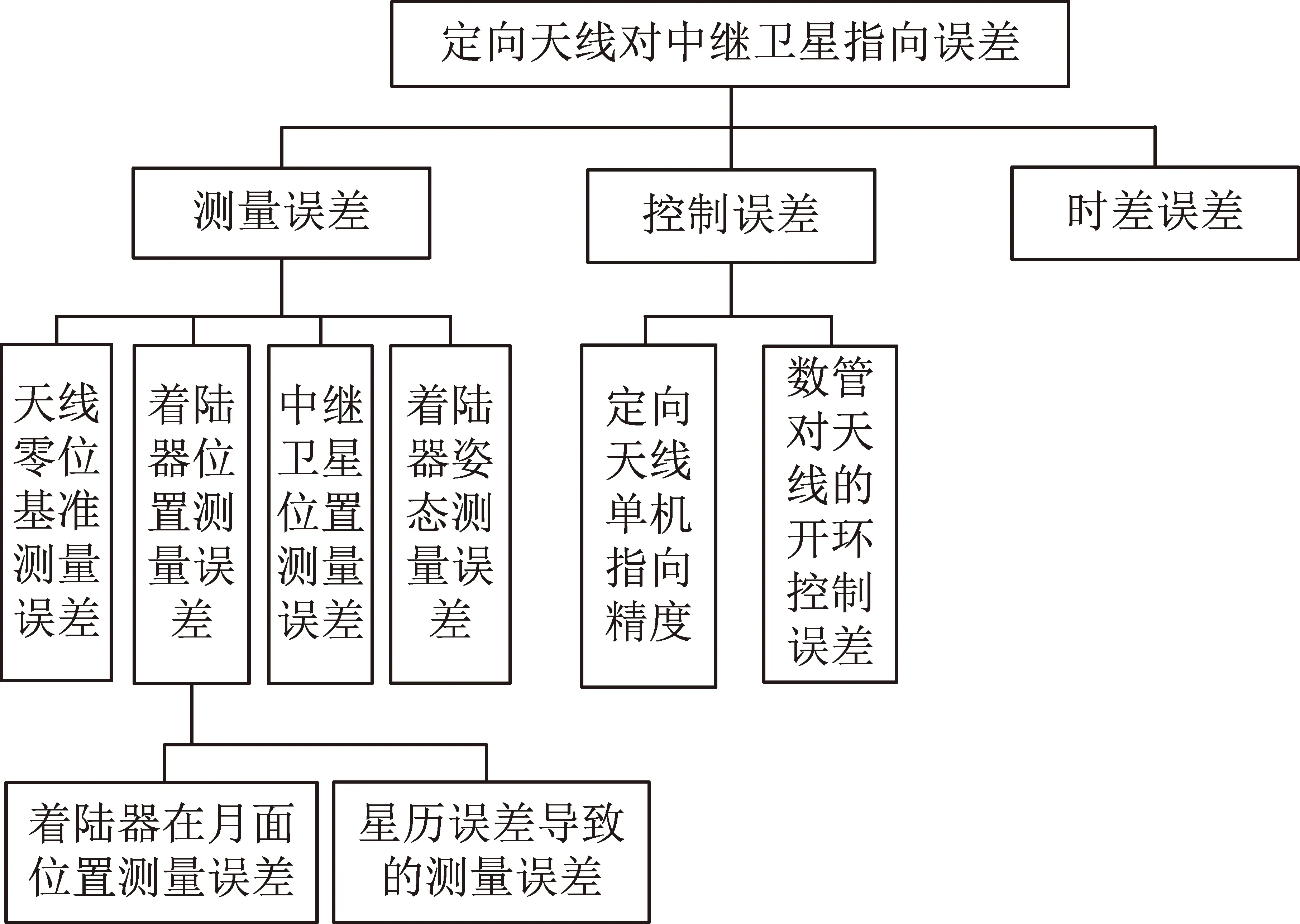
圖5 定向天線對中繼衛星指向誤差分解圖
2)控制誤差對指向影響
控制誤差引起的天線對中繼衛星的指向誤差主要包括天線單機的指向精度(含器上安裝精測誤差)δ1以及數管對天線轉動的開環控制誤差δ2。經分析,由控制誤差引起的天線對中繼衛星的最大指向誤差σ2=δ1+δ2≈0.5°。
3)器星時差對指向影響
著陸器和中繼衛星器(星)-地時間的差異,造成的指向角度誤差主要取決于定向天線轉動的角速度。結合著陸器主著陸區中心點及著陸標稱姿態,對著陸器對中繼衛星指向過程中的角速度進行了分析,結果見圖6和圖7。
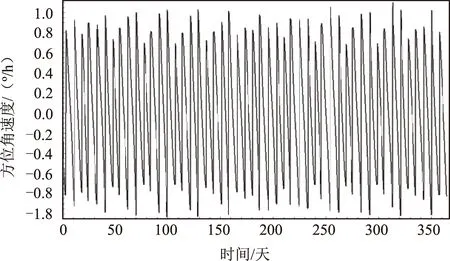
圖6 天線對中繼衛星指向方位角速度
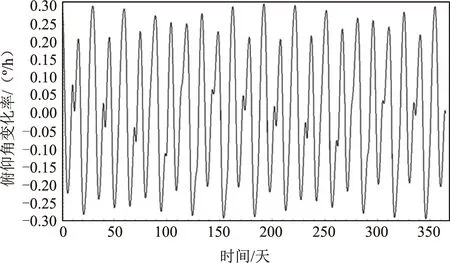
圖7 天線對中繼衛星指向俯仰角速度
如圖6,7所示,著陸器相對中繼衛星指向的方位角最大角速度約1.36(°)/h、俯仰角最大角速度約0.31(°)/h;著陸器與中繼衛星均由地面進行授時,最大器(星)-地時差不大于6 s。計算可得,在最大器(星)-地時差內,中繼衛星角度最大變動σ3約為0.002°。
由上述分析可知,綜合各種因素,著陸器定向天線對中繼衛星指向誤差最大約為:σ=σ1+σ2+σ3≈1.5°+0.5°+0.002°=2.002°。即,著陸器定向天線對中繼衛星指向誤差最大不超過±2.1°。結合此指向誤差可規劃天線開環控制的指向控制策略。
4 定向天線月面工作指向及控制策略
與嫦娥三號著陸器對地通信過程不同,嫦娥四號中繼衛星軌道為L2平動點軌道,幅值為X向約±1.2萬千米,Y向約±3.7萬千米,Z向約±1.3萬千米。L2平動點軌道始終對準月球背面,同月球一起圍繞地球公轉。嫦娥四號著陸器對中繼衛星實現通信時,中繼衛星與月球距離不大于8萬千米,中繼衛星天線波束對著陸器和巡視器實現100%的覆蓋,因此中繼衛星與著陸器二者為全時段可見。在分析中,可將中繼衛星視為在L2平動點軌道上的地球測控站或應用站。
4.1 月面正常捕獲跟蹤指向控制策略
如取主著陸區中心點,以標稱姿態為例對中繼衛星指向進行一年的指向分析,如圖8所示。
如以上分析,著陸器定向天線對中繼衛星方位角最大變化約28.5(°)/天,俯仰角最大變化約7.5(°)/天。中繼軌道約14天運行一個周期,平均速度約1(°)/h,角速度變化緩慢。著陸器定向天線的波束覆蓋范圍為±3.5°,因此,通過地面控制著陸器定向天線定時轉動,可以確保其實時指向中繼衛星。
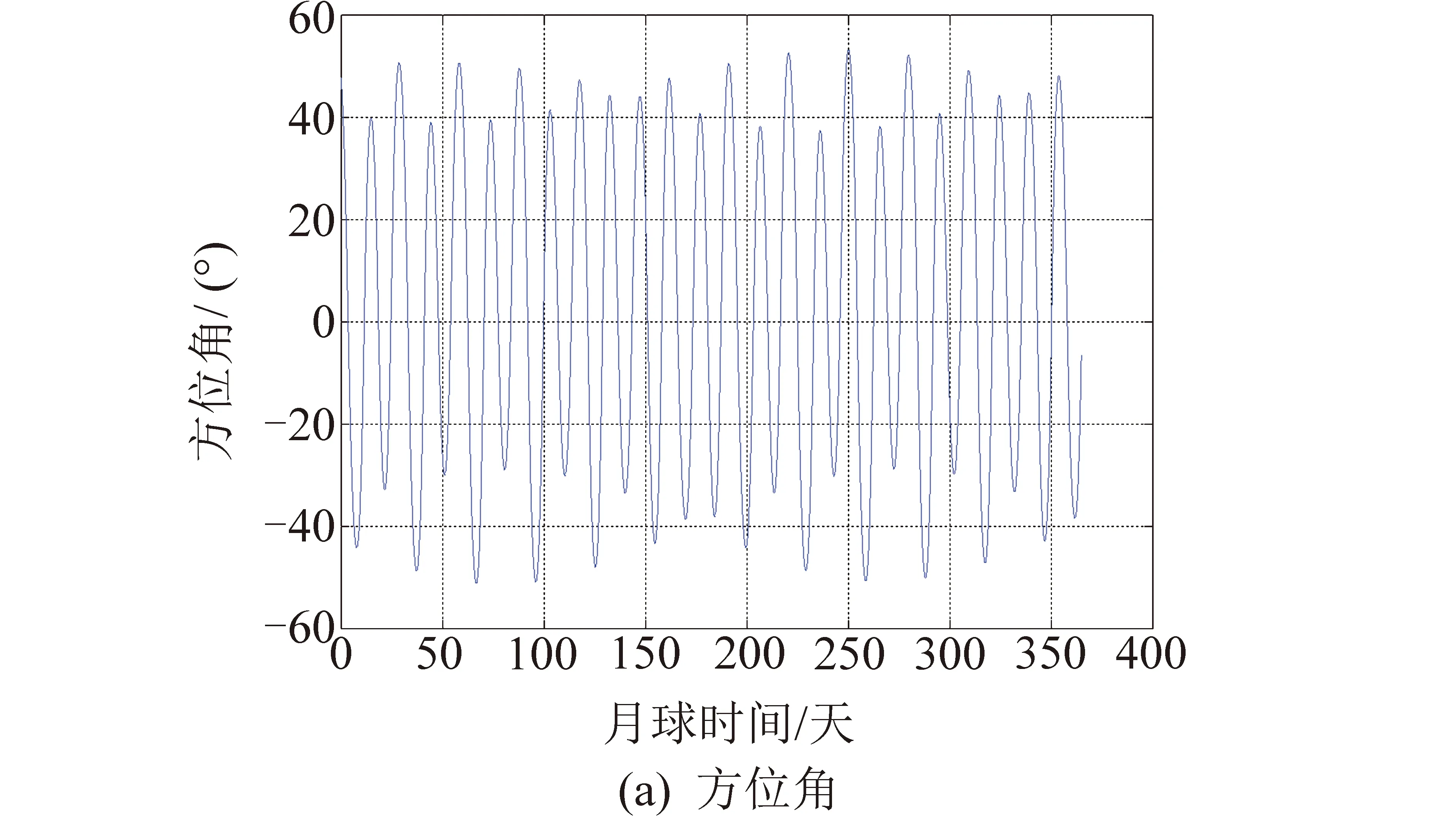
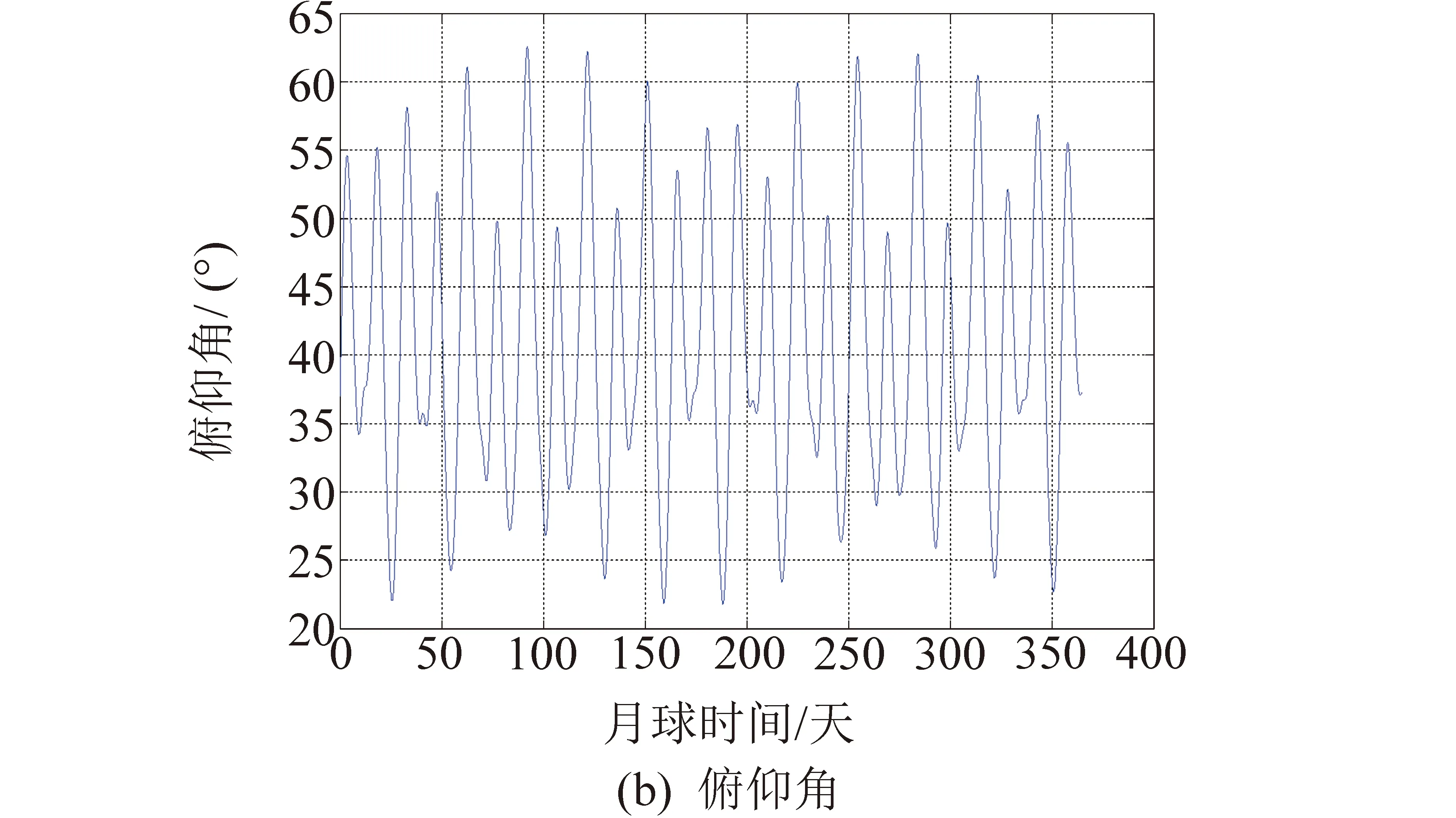
圖8 定向天線對中繼衛星指向角度
探測器著陸后,著陸器定向天線捕獲跟蹤正常程序如下。
(1)著陸器著陸后,定向天線解鎖,天線驅動機構完成從壓緊點到天線零位的回零操作。
(2)地面站依據中繼衛星下傳的著陸器的實際著陸點經緯度以及著陸器慣性姿態數據,計算著陸器——中繼衛星連接矢量在著陸器機械坐標系的指向,得到定向天線反射面機械軸相對中繼衛星的轉動角度數據,并據此生成定向天線雙軸轉動控制的數據注入塊[10]。地面通過數據注入發送給中繼衛星并通過中繼衛星與著陸器之間的全向通信鏈路轉發后,控制天線雙軸轉動,建立返向通信鏈路。簡化的計算過程為:
①結合時刻T(UTC)、著陸器機械坐標系相對著陸點當地坐標系關系、著陸點月理坐標以及定向天線當前指向位置,計算出著陸點-中繼衛星矢量在月固坐標系中位置,通過坐標系轉換,獲得矢量在機械坐標系中位置,再通過此位置矢量計算著陸點-中繼衛星矢量在著陸器機械坐標系中的方位角A1和高度角E1,從而得到本次天線需轉動的角度。定向天線指向步數計算:轉動步數=(下次理論角度值-當前步數計數器角度值)/0.018° (0.018°為天線雙軸轉動機構的步距角)。
②根據著陸器定向天線對中繼衛星指向的范圍,考慮定向天線中心波束指向中繼衛星時,半波束可覆蓋的中繼衛星軌道范圍進行預算,使得間隔一定時間控制定向天線波束跟隨中繼衛星軌道轉動,確保波束中心指向著陸器-中繼衛星連接矢量方向,保證對中繼衛星的穩定跟蹤。
③著陸器著陸月球表面后,結合中繼衛星對地測控弧段進行對著陸器定向天線指向的調整。定向天線對中繼衛星指向調整的原則為:依據計算結果實時控制天線指向著陸器-中繼衛星矢量。由于定向天線的波束張角為±3.5°,則返向鏈路在指向中繼衛星時隨中繼衛星運動可能丟失。由于著陸器定向天線對中繼衛星指向誤差最大不超過±2.1°(見前文分析),因此定義定向天線對中繼衛星指向變化超過波束角與指向誤差值的差角1.4°時,對定向天線指向進行調整。即定向天線角度指向調整原則為,地面提前計算著陸器-中繼衛星持續的矢量變化,如大于1.4°,則進行定向天線指向機構的角度調整,使定向天線波束指向天線調整時刻的著陸器-中繼衛星矢量指向。
4.2 在軌不同工作時段天線指向控制策略
根據以上調整時機及原則,定向天線在著陸初期第一個連續測控弧段以及后續正常工作期間,角度指向控制策略如下。
1)著陸初期第一個中繼衛星對地弧段
根據嫦娥四號著陸器首發窗口標稱著陸時間,著陸后連續測控弧段有將近20 h。期間著陸器定向天線需要調整約5次。因此,在著陸器著陸后,天線解鎖并指向中繼衛星完成中繼鏈路建立后,隨即注入24 h的天線雙軸機構延時指令數據,使天線實時指向著陸器-中繼衛星矢量位置。
2)探測器在軌工作段
后續實際飛控操作中,天線指向調整的策略為:每天結合中繼衛星軌道計算當日著陸器-中繼衛星矢量,并在每天進入中繼衛星跟蹤弧段后,地面注入當日天線雙軸機構轉動的所有延時數據注入,對定向天線角度進行調整,使得天線當日在弧段內外能夠實時指向著陸器-中繼衛星矢量方向。
3)天線指向調整延時數據注入需求及限制
根據估算,在著陸器的壽命周期中,著陸器相對中繼衛星指向調整每日次數不等,最多一日為每小時調整1次,即24 h內需調整指向24次。因此,需考慮到著陸器每日延時數據注入的最大限制,確保延時指令注入條數不超過限制。
5 中繼定向鏈路丟失后的盲捕策略
著陸器著陸后,定向天線轉動到中繼衛星位置時,如中繼衛星無法捕獲到天線下傳信號,無法實現對著陸器數傳信號的接收解調及轉發,排除中繼衛星接收問題后,可判斷天線進入在軌盲捕模式。出現以上問題的原因主要為以下幾項。
(1)著陸器著陸過程姿態控制超差,或著陸后GNC系統姿態測量設備等出現故障,無法給出著陸姿態;
(2)GNC系統給出的姿態數據偏差大,導致定向天線在軌展開后,無法準確計算天線軸線與中繼衛星相對位置;
(3)天線角度傳感器出現故障,天線無法歸零或歸零錯誤。
5.1 盲捕范圍的確定
盲捕最大范圍取決于固定窗口及已選著陸區情況下,探測器著陸后,天線相對中繼衛星的指向最大范圍。月面工作段影響著陸器到中繼衛星指向矢量變化的因素包括:工作時間、著陸點位置、中繼衛星位置以及著陸姿態偏差。
針對中繼衛星確定的發射窗口,月面工作段著陸器在不同位置以標稱姿態著陸,著陸器到中繼衛星指向的方位角和俯仰角(即相對著陸點天西南坐標系)最大包絡角度變化范圍為:方位角:-54°~+67°;俯仰角:14°~64°,即可規定在盲捕中,方位角搜索范圍約120°,俯仰角搜索范圍約50°。在此范圍內進行搜索,確保返向波束能夠被中繼衛星捕獲。
5.2 不同指向偏差時的盲捕策略
對于目的為中繼衛星的掃描搜索,其搜索范圍一般應結合中繼衛星軌道、深空探測器位置、姿態以及深空探測器和中繼衛星的相互位置、相對運動規律等因素來確定。為減小搜索的時間和實現地面控制的簡易性,在進行盲捕操作時,可分為小范圍慢速掃描和大范圍快速掃描模式。這兩種模式主要用于使天線盡快找到中繼衛星位置,進行著陸器對中繼衛星的初步定位,完成遙測及數傳數據下傳。
5.3 小范圍慢速掃描搜捕模式
小范圍掃描模式主要應用于著陸器初始著陸姿態偏差誤差較小,天線指向偏離范圍不大的情況。
考慮到著陸器與中繼衛星之間返向鏈路的余量以及天線波束寬度等因素,確定小范圍搜索捕獲的搜索范圍(±θ)。以掃描起始點為中心,在此小范圍內進行慢速直線掃描,設定天線轉動速度為慢速轉動。在搜索捕獲時,采取“一步一判”的方法,即天線每轉動掃描1°,控制天線停轉,對中繼衛星下行遙測進行判讀。如遙測顯示,中繼接收機已鎖定著陸器定向天線傳輸的返向信號,則控制天線停掃;如未鎖定,則控制天線繼續按圖9的路徑圖掃描,直至中繼接收機鎖定。具體步驟如下。
(1)根據實際著陸點位置、著陸時刻、標稱著陸姿態,計算標稱的定向天線指向目標方位角ATX,目標俯仰角ETX。
(2)定向天線按正常工作程序完成解鎖并首次歸零后,指向目標方位角ATX,目標俯仰角ETX。
(3)以方位角ATX,俯仰角ETX為中心,在方位角ATX-θ~ATX+θ,俯仰角ETX-θ~ETX+θ的范圍內進行粗捕。粗捕路徑及過程描述為:①控制天線從位置(ATX,ETX)開始轉動到(ATX+1°,ETX),轉動速度為慢速;②天線停轉后,監視中繼衛星中繼接收機鎖定遙測:如遙測值顯示信號已捕獲,即中繼衛星接收機已實現載波鎖定及幀同步,可以正常接收定向天線下傳的遙測及數傳數據。此時可以停止盲捕流程,進入正常工作模式;③重復上述步驟①~②,天線從位置(ATX,ETX)開始轉動到(ATX+θ,ETX),轉動到(ATX+θ,ETX+1°)如圖9中虛線所示;④重復上述路徑,本次粗搜索轉動到(ATX-θ,ETX-θ)結束。
如采用小范圍掃描模式無法搜索到著陸器下行信號,可通過大范圍快速掃描模式繼續搜索信號。

圖9 小范圍慢速掃描模式路徑示意圖
5.4 大范圍快速搜捕模式
大范圍快速搜捕模式的目的主要用于快速發現著陸器定向天線返向信號,進行天線對中繼衛星的初步定位。此掃描模式主要用于著陸器初始姿態偏差誤差較大,或在小范圍慢速掃描中未能搜索到目標的情況。掃描起始點選擇定向天線對中繼衛星指向區域的中心點位置,天線采用直線路徑方式進行搜索。
1) 捕獲策略
控制天線以可實現的最大轉速,在中繼衛星相對于著陸器指向的可能范圍內進行快速掃描搜索,由于天線轉速較快,因此能夠在較短時間內完成對整個波束可能覆蓋范圍的掃描。(波束所有可能覆蓋范圍定義為(ΦA,ΦB),由標稱著陸點位置、著陸時刻,著陸姿態以及中繼衛星在整個任務期間的軌道決定)
大范圍快速掃描模式的搜索掃描角度覆蓋了著陸器對中繼衛星指向的所有范圍。在掃描過程中,采用快速掃描模式找到中繼衛星大致方向后(中繼接收機載波鎖定),需回到慢速掃描模式,直到中繼衛星中繼接收機鎖定,遙測正常下傳為止。掃描路徑示意如圖10所示。
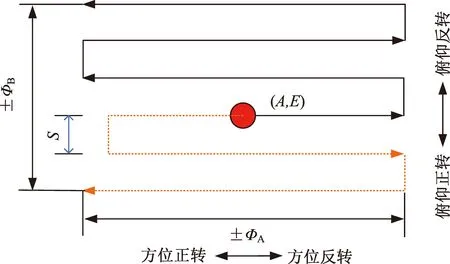
圖10 大范圍快速掃描路徑示意圖
2) 捕獲流程
(1)定向天線按正常程序完成解鎖并首次歸零后,控制定向天線指向目標方位角ATX,目標俯仰角ETX。
(2)以方位角ATX,俯仰角ETX為中心,方位角ATX-ΦA~ATX+ΦA,俯仰角ETX-ΦB~ETX+ΦB進行粗捕。粗捕路徑及過程如下:①控制天線從位置(ATX,ETX)開始轉動到(ATX+ΦA,ETX),轉動速度為快速轉動,如圖10中虛線所示;②從(ATX+ΦA,ETX),轉動到(ATX+ΦA,ETX+S),如圖10中虛線所示;(S為步長,步長的選擇可按照掃描范圍確定);③從(ATX+ΦA,ETX+S),轉動到(ATX-ΦA,ETX+S);④重復上述路徑,本次粗搜索轉動到(ATX-ΦA,ETX+ΦB)結束。
(3)在上述天線單次轉動過程中,對中繼衛星下行遙測進行監視,在發現接收機鎖定后,停掃,并判斷粗捕結束。
與嫦娥三號著陸器盲捕操作相比,定向通信鏈路由對地改為對中繼衛星,盲捕過程的實時判決缺少地面站的參與,因此需要通過對中繼衛星的相關遙測量進行判決后再進行下一步規劃,降低了處置的實時性,同時也增加了盲捕策略的復雜度。
6 在軌實際驗證情況
嫦娥四號探測器于2019年1月3日著陸于月球背面后,定向天線順利完成電爆解鎖釋放,雙軸驅動機構完成展開歸零,到達零位后再按照地面控制指令轉動到中繼衛星方向,建立返向中繼鏈路。從落月后,定向天線雙軸回零,到完成平臺在軌交付用戶(截止至2019年2月1日20點),根據本文中所制定的天線指向控制策略,通過指令控制定向天線對中繼衛星進行指向,期間機構最快每隔約3 h左右調整一次,最慢每隔約5 h左右調整一次,定向天線雙軸共計對中繼衛星指向69次,指向準確,星間鏈路工作正常。完成在軌交付至今的在軌試驗中,著陸器定向天線對中繼衛星指向正常,未出現中繼鏈路丟失現象。
7 結束語
在首次地月L2點中繼通信任務中,結合任務特點,制定了嫦娥四號著陸器對中繼衛星指向的天線控制策略及盲捕策略。根據定向天線對中繼衛星的在軌指向結果及中繼數傳鏈路的工作狀態,表明定向天線指向控制方案正確、指向策略合理、驗證充分,有效保證了嫦娥四號著陸器與中繼衛星的中繼通信鏈路的暢通,圓滿支持了嫦娥四號探測器中繼通信任務。同時,本文提出的天線控制策略及盲捕策略也可為后續深空探測任務中天線指向控制策略的設計與驗證提供了參考。
