基于數據驅動的高速列車廣義預測控制器的性能監控
2019-11-13 11:55:10連文博劉伯鴻李婉婉
鐵道科學與工程學報 2019年10期
連文博,劉伯鴻,李婉婉
基于數據驅動的高速列車廣義預測控制器的性能監控
連文博,劉伯鴻,李婉婉
(蘭州交通大學 自動化與電氣工程學院,甘肅 蘭州 730070)
針對目前ATO成熟的廣義預測控制器進行性能監控的研究,使用數據驅動的方法,從列車運行現場產生的大量輸入輸出數據著手,利用PCA統計方法降維,分析該控制器的性能基準,使用支持向量機對4種導致控制器性能下降的因素進行分類仿真,結果表明:分類器可以實現性能診斷,分類效果理想,誤判和漏報的情況很少發生。
廣義預測控制器;數據驅動;性能監控;支持向量機

目前,高速列車GPC在控制算法的改進方面基本趨于飽和,在區間運行的列車控制器初期有良好的控制效果,但是隨著列車的不斷運行,控制器的控制性能會下降,對列車的運行效率和舒適度會產生不良的影響[1]。從ATO系統的可維護角度出發,實時監控GPC控制器的性能,結合目前應用的控制器性能監控技術,構造出高速列車GPC控制器的性能評價和性能診斷的框架,對于提高高速列車自動駕駛的運行安全、舒適度和節能等方面有重要意義。基于數據驅動的預測控制器性能監測技術已經在工業領域取得了良好的效果,JIANG[2]結合模型校驗和性能評價的方法在石腦油處理裝置上被應用;Vishnubhotla[3]改進的最小方差基準在MPC控制器的性能評估中取得良好的效果;在列車預測控制器的性能監控方面,劉泉等[4]研究萬噸級重載列車在不同編組方式下的控制性能,但沒有考慮高速列車GPC控制器的部分。本文提出對高速列車的GPC控制器進行性能監控,使用PCA對從濟南到泰安的現場實時數據進行降維,在主元空間分析牽引/制動力與速度之間的關系,研究性能基準,然后采用支持向量機對4種造成控制器性能下降的因素進行診斷;實時監控控制器的性能,并對性能下降的原因精確診斷,從維護的角度提高列車的行車效率和安全。
1 高速列車廣義預測控制器
預測控制在工業很多領域都得到了廣泛的應用,廣義預測控制器具有良好的控制性能,其利用系統辨識得到模型方程的特點,能夠準確表述整個運動過程的細節,克服了列車單質點、多質點建模的困難;廣義預測控制器作為預測控制的分支,利用CARIMA模型作為基礎模型,采用了長時段的優化性能指標,結合辨識和自校正機制,克服了自適應算法存在的廣義最小誤差、極點配置等問題,成功應用到列車ATO系統[6?8]。
1.1 高速列車的動力學模型
本文選擇的控制器采用單質點的動力學模型,對ATO系統的控制過程進行了簡化,利用動力學知識進行分析后,得到了如式(1)的模型方程。

式中:()表示列車實際運行速度;()表示列車實際牽引制動力,需要注意的是其中,,和都是時間變量,需要辨識。
1.2 預測模型
使用文獻[9]的預測模型,該預測模型利用列車實時運行數據,采用AM-VFF-RLS辨識算法,將辨識結果如式(2)作為廣義預測控制器的預測模型。


1.3 控制器參數及框架
廣義預測控制器具有滾動優化的特性,經過多步預測,可以實現目標精確追蹤。該控制器對于目標曲線采用一階柔化處理,輸入控制量為列車的牽引/制動力,輸出量為列車的速度。本文采用的預測控制器的參數依次為:最大預測長度=20,控制長度=10,控制加權系數為=0.05,柔化系數=0.3,階梯因子=0.25,該預測控制器的結構如圖1所示。
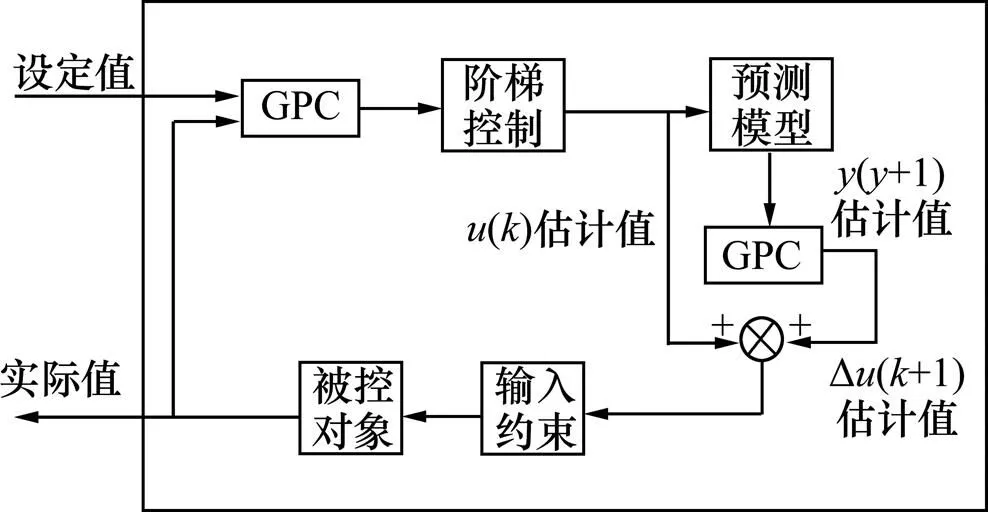
圖1 GPC結構圖
2 預測控制器性能監控
基于數據驅動的GPC性能監控需要充分利用控制器運行過程中產生的輸入輸出數據,首先從大量的現場數據中挖掘出可利用的信息,建立評價機制,實時評價控制器的性能是否正常,一旦控制器的性能出現下降,需要及時診斷出性能下降的原因;整個過程由性能評價和性能診斷2部分構成。
2.1 性能評價
經過預處理后的數據需要進行降維處理,采用PCA(主元分析法)將數據降維到低維空間,分成了主元和殘元2部分,使用基于馬氏距離的2和2統計量作為性能指標,它們分別表征誤差子空間的性能變化和主元子空間的性能變化,定義為:

其中:∈R×n為監控變量矩陣;為樣本;為變量個數;t(=1, 2,…,)和t,j+k(=1, 2, …,-)分別是第個主元和第個殘元的取值;是由協方差矩陣≈T/(?1)對應于的非零特征值組成的對角矩陣。
其中:∈R×n;′∈R×(n?k)分別表示主元和殘元空間的得分矩陣;是主元個數。數據在殘元和主元空間都有其特征表示,將2和22個指標孤立很難發現性能的變化規律,在性能診斷階段也不容易判斷,本文用φ指標整合了2和2指標,如式(5)~(6)所示:

確定好性能指標后需要進行性能評價,首先根據先驗經驗選擇良好工況的數據,使用式(7)計算出控制器的性能基準,再實時采集運行數據,根據式(3)~(6)計算出當前性能指標,與性能基準做比較,判斷是否需要進行性能診斷,性能評價的流程圖如圖2所示。
2.2 性能診斷
根據目前對于預測控制器的性能診斷研 究[10?12],導致控制器性能下降的內在原因主要包括4個,分別是:模型失配、噪聲失配、GPC約束飽和以及GPC參數設置不良。

使用支持向量機作為性能模式的分類算法,該算法具有魯棒性好、計算簡單等優點,選擇適當的核函數(,′)和適當的參數,如式(8)所示,可以保證得到最優解。

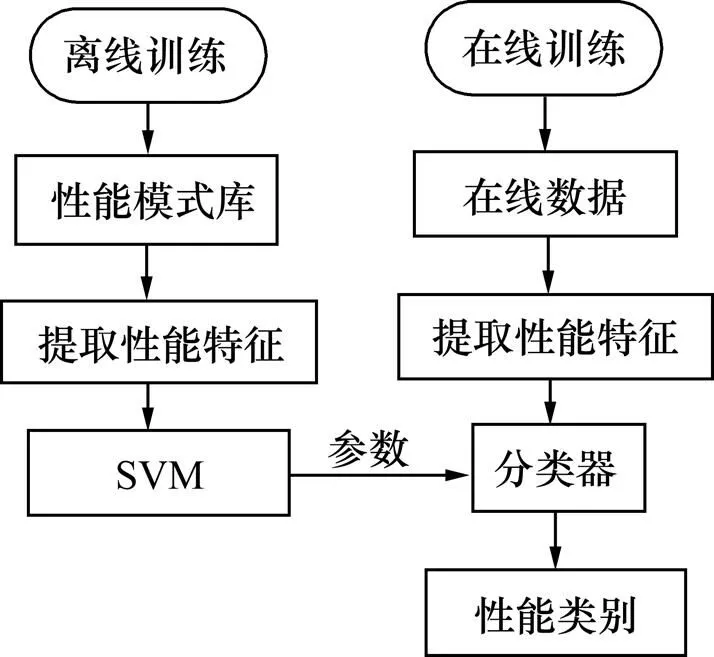
圖3 性能監控流程圖
2.3 監控效果評價
在性能監控體系中,本文使用誤報率MSI和漏報率FTR 2種指標[13]來評價該方法的好壞,誤報率表示在一定的樣本集數目下,將控制器性能正常運行的數據誤判成性能下降的數據的比例;漏報率表示將控制器性能下降的數據誤判成性能正常的數據,通過比較2個指標的大小,可以量化判斷該方法的監控效果,如式(9)和式(10)所示。
3 仿真分析
3.1 性能評價
以50 ms為采樣周期,采集列車從濟南到泰安運行的1 600組采樣點作為基礎數據,如圖4所示,數據是經過去噪和中心化等預處理的,其中虛線表示GPC控制器的輸入量牽引/制動力,實線是控制器的輸出量列車實時速度,兩者組成二維向量作為PCA主元素分析的原始空間數據,共有1 600×2組。
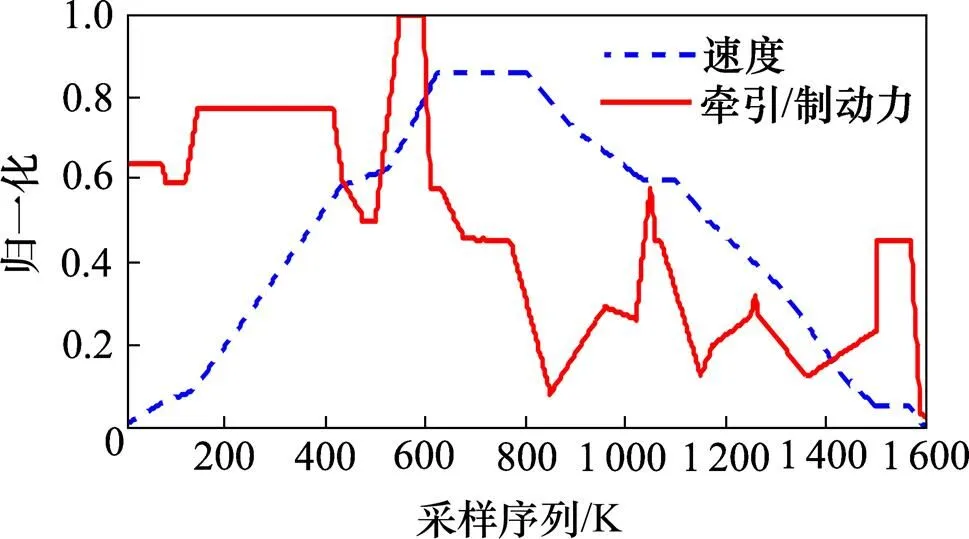
圖4 原始數據
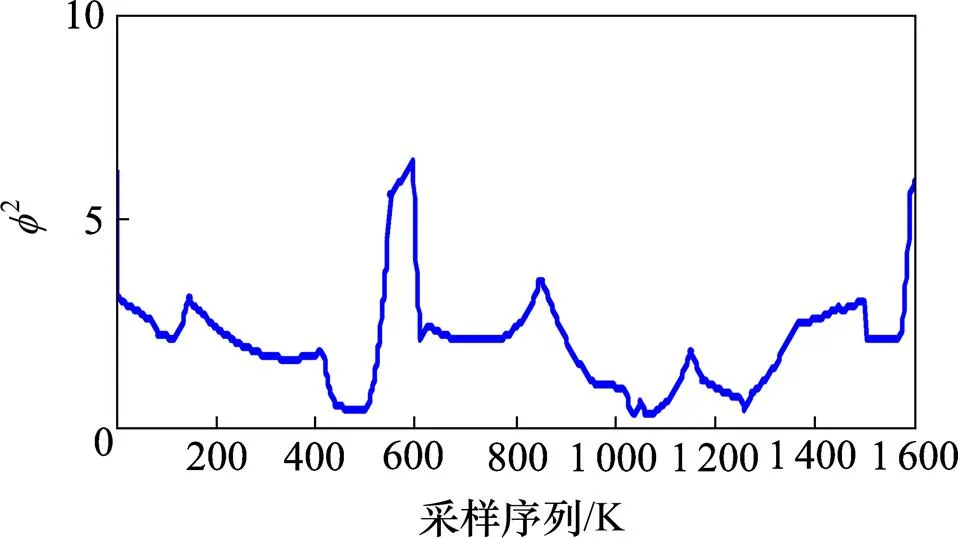
圖5 正常運行的性能指標
通過對1 600×2組數據進行離線仿真,得到廣義預測控制器正常運行的性能基準范圍為[5.3 7.4]。
3.2 性能診斷

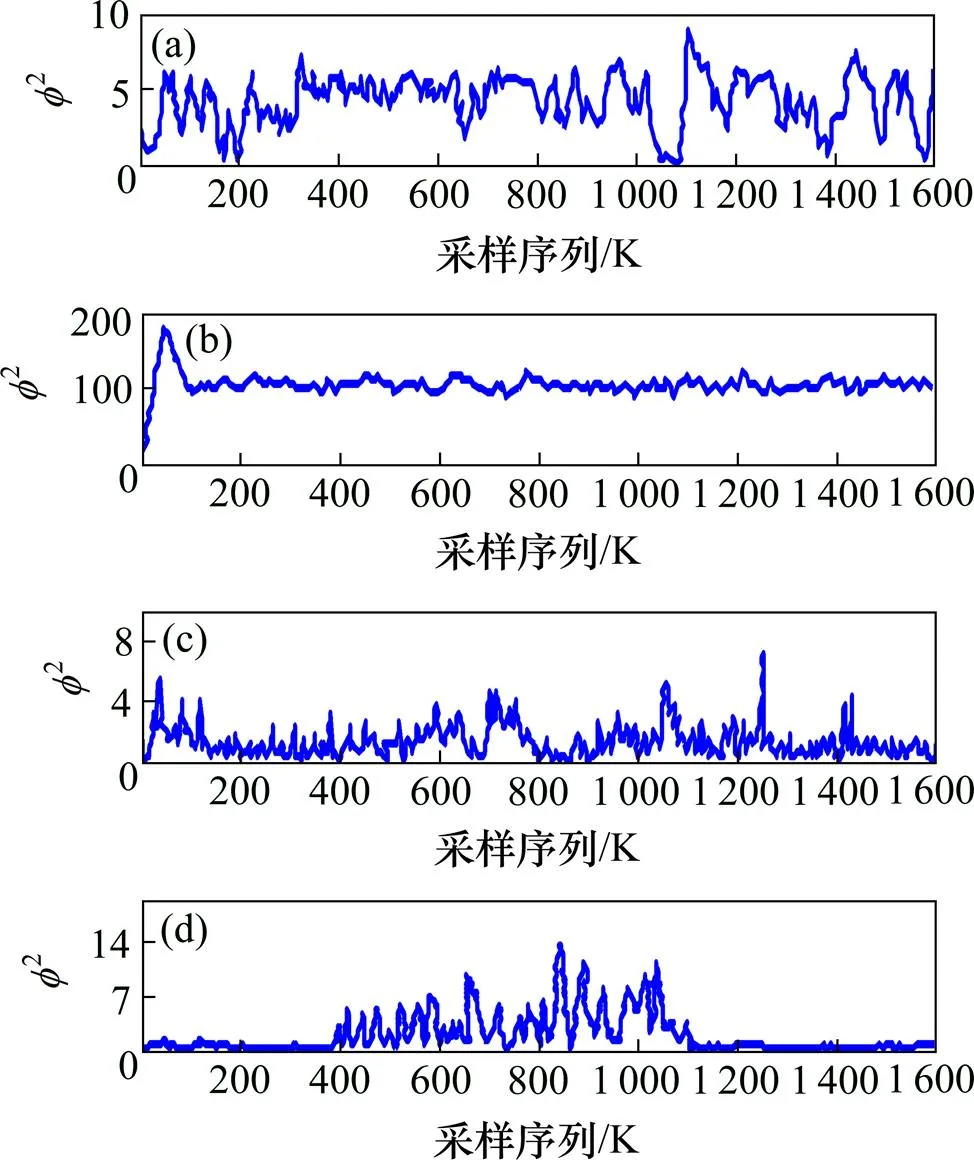
(a) 噪聲失配;(b) 過程模型失配;(c) 約束飽和;(d) 參數設置不當

表1 訓練集

表2 測試集
針對T1~T4 4種性能模式,SVM分類后的正確率依次為92.74%,94.43%,89.76%和98.76%,計算監控指標=2.76%,=4.74%,結果表明性能評價過程中誤判和漏報情況極少發生,并且對于性能下降的點能夠準確診斷其類型。
4 結論

3) SVM算法也能夠對性能下降的原因進行診斷,在高速列車GPC上應用性能監控技術能夠保證行車安全,從維護的角度提高行車效率;和現有的改進控制算法的精度相比,性能監控的解決方法在可靠性和操作性等方面更佳。
[1] 蘇偉波. 高速列車廣義預測調優控制方法[D]. 南昌: 華東交通大學, 2018. SU Weibo. Generalized predictive tuning control method for high-speed trains[D]. Nanchang: East China Jiaotong University, 2018.
[2] JIANG H. Model analysis and performance analysis[J]. Control Engineering Practice, 2011, 5(4): 102?107.
[3] Vishnubhotla A. Feedback and feedforward performance [J]. Proceedings of ADCHEM, 1997, 3(2): 21?27.
[4] 劉泉, 方長征. 重載組合列車在不同編組模式下制動性能研究分析[J]. 機車電傳動, 2016, 3(6): 25?32. LIU Quan, FANG Changzheng. Different marshalling models[J]. Electric Drive for Locomotives, 2016, 3(6): 25?32.
[5] 羅仁士. 列車駕駛容錯控制技術研究[D]. 北京: 北京交通大學, 2012. LUO Renshi. Research on fault-tolerant control technology of train driving[D]. Beijing: Beijing Jiaotong University, 2012.
[6] 王建國, 王娟娟, 肖前平. 一種數據驅動的控制器性能在線監控策略[J]. 計算機與應用化學, 2014, 31(5): 521?525. WANG Jianguo, WANG Juanjuan, XIAO Qianping. A data-driven controller performance online monitoring strategy[J]. Computer and Applied Chemistry, 2014, 31(5): 521?525.
[7] 袁佳希. 列車在線辨識與預測控制研究[D]. 杭州: 浙江大學, 2017. YUAN Jiaxi. Research on online train identification and predictive control[D]. Hangzhou: Zhejiang University, 2017.
[8] 張光明, 李檸, 李少遠.一種數據驅動的預測控制器性能監控方法[J]. 上海交通大學學報, 2011, 45(8): 1113? 1118. ZHANG Guangming, LI Ning, LI Shaoyuan. A data-driven predictive controller performance monitoring method[J]. Journal of Shanghai Jiaotong University, 2011, 45(8): 1113?1118.
[9] 張巍. 時變擾動控制系統性能評估方法[D]. 上海: 華東理工大學, 2014. ZHANG Wei. Performance evaluation method of time-varying disturbance control system[D]. Shanghai: East China University of Science and Technology, 2014.
[10] WANG J, ZHANG Q. Detection of asymmetric control value stiction from oscillatory data using an exteed Hammerstein system identification method[J]. Journal of Process Control, 2014, 24(1): 1?12.
[11] ZHAO Yu, SU Hongye, GU Yong. Multivariable control performance evaluation method based on generalized minimun variation benchmark[J]. Chinese Journal of Chemical Engineering, 2010, 18(1): 86?94.
[12] 范峰輝. 基于閉環數據的MPC性能評價及模型失配研究[D]. 青島: 中國石油大學(華東), 2015. FAN Fenghui. Performance evaluation and model mismatch of MPC based on closed-loop data[D]. Qingdao: China University of Petroleum (East China), 2015.
[13] 周培杰. 基于優先級策略的MPC性能評估及應用[D]. 杭州: 浙江大學, 2015. ZHOU Peijie. Performance evaluation and application of MPC based on priority strategy[D]. Hangzhou: Zhejiang University, 2015.
Performance monitoring of generalized predictive controller for high-speed train based on data-driven
LIAN Wenbo, LIU Bohong, LI Wanwan
(College of Automatic & Electrical Engineering, Lanzhou Jiaotong University, Lanzhou 730070, China)
It is aimed to research the performance monitoring of GPC which is widely accepted in ATO system, based on data-driven method, using the input and output data from the scene. Then, using the statistical method PCA to realize the dimension reduction can obtain the performance benchmark. Furthermore, using support vector machine (SVM) for four factors led to the decrease of the controller performance to simulate, the classification results show that the classifier can achieve performance diagnosis. More importantly, classified effect is ideal, mistakes and omission rarely happen.
generalized predictive controller; data-driven; performance monitoring; SVM
TP207
A
1672 ? 7029(2019)10? 2402 ? 05
10.19713/j.cnki.43?1423/u.2019.10.003
2019?01?02
國家重點研發計劃項目(2017YFB1201003-20)
劉伯鴻(1968?),男,甘肅臨洮人,副教授,從事鐵路運輸自動化及控制研究;E?mail:liubohong@mail.lzjtu.cn
(編輯 陽麗霞)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
石油瀝青(2021年4期)2021-10-14 08:50:44
世界科學技術-中醫藥現代化(2021年10期)2021-03-02 05:52:06
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
中國工程咨詢(2015年2期)2015-02-14 02:59:26
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51
