道路模擬試驗平臺運動學反解算法研究
2019-11-15 02:17:22鄒喜紅王瑞東
重慶理工大學學報(自然科學) 2019年10期
關鍵詞:模型
鄒喜紅,王瑞東,呂 強,夏 銞,田 橫,向 輝
(1.重慶理工大學 汽車零部件先進制造技術教育部重點實驗室, 重慶 400054;2.重慶美萬新能源汽車科技有限公司, 重慶 401121)
隨著汽車行業的飛速發展,企業對于試驗設備需求增長非常迅猛。在物理樣機完成之后為盡快適應市場,通常會采用實驗模擬現實的情況來縮短測試時間,其中道路模擬試驗平臺以它獨特的優勢得到了企業的青睞,在汽車領域得到了廣泛傳播和重要運用[1-2]。
相對于傳統的試驗平臺,該道路模擬試驗平臺具有空間可達位置大、穩定性高、不易發生干涉等優點,已成為汽車領域研究的熱點,現已廣泛應用在機床、運動模擬器以及各種娛樂設施上[3-4]。因此,對于道路模擬試驗平臺進行深入研究具有一定的理論價值和實際意義。
要對道路模擬試驗平臺進行深入研究首先要對平臺的機械結構和運動特性進行分析,這就要涉及運動學正解和反解。目前,國內外對于道路模擬試驗平臺反解算法的研究比較少,大都控制精度不夠,理論過程太過復雜[5-6],所以本文旨在提出一種運動學反解算法,并通過ADAMS軟件進行驗證,為后續對平臺進行精確的控制奠定基礎。
1 道路模擬試驗平臺的結構與原理
道路模擬試驗平臺是一種具有6自由度運動能力的機構,如圖1所示,其主要組成為:① 動平臺,用于承載負載(被試件);② 液壓作動器,共6個,用于實現驅動;③ 轉動塊3個,用于實現運動換向;④ 連桿3個,用于連接動平臺與轉動塊;⑤ 鉸鏈,包括6個球鉸,6個虎克鉸,用于固定連接兩個構件;⑥ 靜平臺,為機構的底座。本串聯式6自由度平臺通過6個液壓作動器的伸縮來實現橫移、縱移、升降、橫擺、側傾、偏航6個自由度的運動以及它們的組合運動。
2 平臺運動學反解算法
以豎直方向的3個作動器中心位置為靜坐標原點,以靜坐標原點沿Z軸方向移動到動平臺上表面為動坐標原點分別建立靜坐標系和動坐標系,如圖1所示。
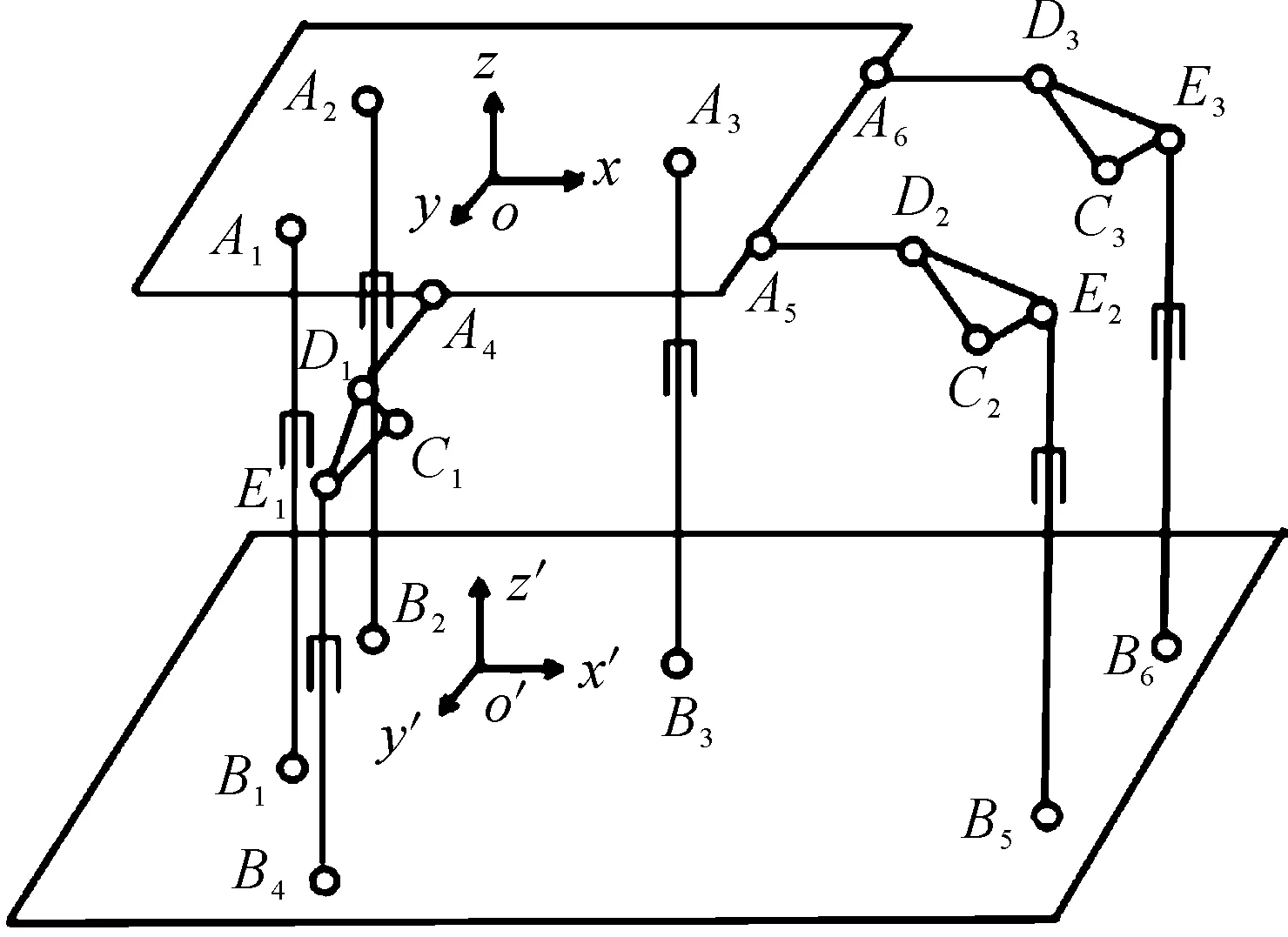
圖1 道路模擬試驗平臺簡圖
對于道路模擬試驗平臺的運動學求解有正解和反解兩種,已知動平臺在空間中的位姿求作動器的伸長量為運動學反解。用坐標q=(q1,q2,q3,q4,q5,q6)來表示動平臺在靜坐標中的位姿,q1、q2、q3來表示動平臺在靜坐標的位置,q4、q5、q6表示動平臺在靜坐標系中的姿態角,把動平臺在任意一點的位姿看成是先以x、y、z平移,然后以z、y、x旋轉而得,變換矩陣T為:
(1)
式中: sinq=snq,cosq=csq。
設動平臺上的鉸點在動坐標系中的齊次坐標為Ai=(Aix,Aiy,Aiz,1)T,靜平臺上的鉸點在靜坐標系中的齊次坐標為Bi=(Bix,Biy,Biz,1)T,動坐標原點在靜坐標系中的齊次坐標為O=(Bx,By,Bz,1)T。 則1、2、3號作動器的長度矢量在靜坐標系中可表示為
Li=TAi+O-Bi
(2)
所以1、2、3號作動器的桿長方程為
(3)
因此1、2、3號作動器的伸長量為
ΔLi=Li-L0,i=1,2,3
(4)
式中:Li為作動器發生位置變化以后的長度;L0為作動器原始桿長。
對于4、5、6號作動器位置反解,選4號作動器作為研究對象,xz平面作為參考平面,假設轉動點C1的坐標為C1=(C1x,A1y,A1z,1)T,對應虎克鉸點的位置為D1=(D1x,D1y,D1z,1)T。
由圖2可知,D點的運動軌跡在以C點為圓心、半徑為轉動塊長臂LC1D1的軌跡上。
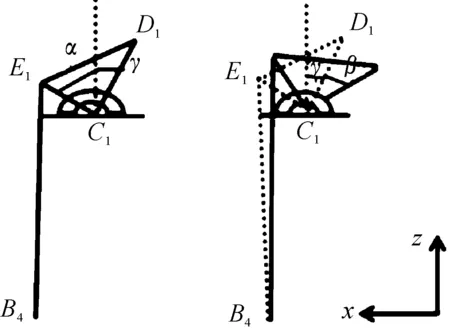
圖2 作動器與轉動塊位置關系圖
由約束位置關系可知:
(5)
當動平臺有位姿變化時,連桿的空間位置發生變化,但模不變,即Lg1不變。所以有:
(6)
即可求得轉角β,通過轉角計算4號作動器上鉸點E1的坐標:
(7)
可求得4號作動器的長度:
(8)
由此可得4號作動器伸長量為
ΔLi=L4-L0
(9)
同理可求得5、6號作動器的伸長量。
3 平臺運動學反解仿真分析及驗證
3.1 道路模擬試驗平臺三維建模
利用CATIA對平臺進行了三維建模,建模過程主要分為3步:① 首先根據被試件的尺寸跟激勵情況確定動、靜平臺的大小和各鉸點的布置位置;② 進行草圖繪制、拉伸切除、打孔建立平臺各構件的三維模型;③ 根據各構件間的約束關系在product模塊中完成裝配。模型如圖3所示。
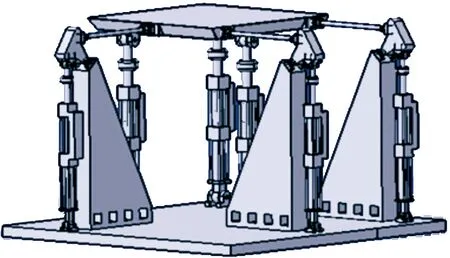
圖3 道路模擬試驗平臺三維模型
3.2 運動學反解Simulink建模
在Matlab Simulink模塊中建立道路模擬試驗平臺位置反解仿真模型,如圖4所示。仿真模型包括3個模塊:① 輸入模塊,用于給定動平臺的位姿;② function模塊,通過編寫程序的方式實現反解過程的數學運算;③ 輸出模塊,輸出作動器的伸長量。
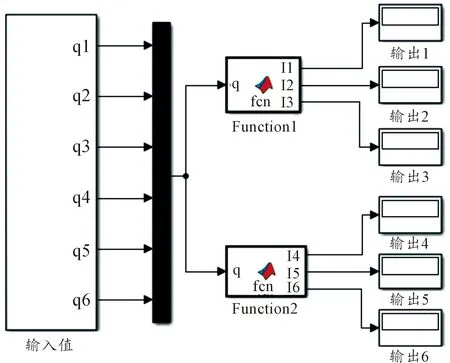
圖4 平臺位置反解Simulink仿真模型
3.3 位置反解ADAMS運動學仿真
把CATIA建立的模型導入ADAMS中,添加運動副約束,然后單擊模型檢查工具箱,系統會根據構件數量、運動副類型以及驅動類型檢查所添加的運動副是否與理論相吻合,結果會在信息窗口顯示,最后在Motion模塊給定6個作動器位移驅動,通過測量函數監測動平臺的位姿變化;反之,也可給定平臺一位姿來監測作動器的伸長量。道路模擬試驗平臺運動后仿真見圖5,作動器伸縮量變化曲線見圖7。
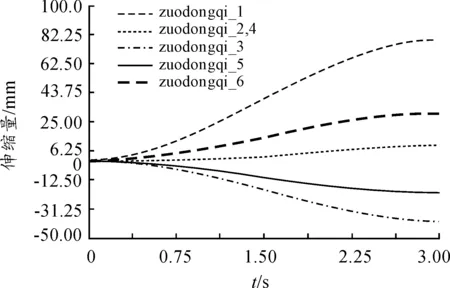
圖6 作動器伸縮量變化曲線
3.4 仿真結果對比
為了驗證ADAMS位置反解仿真的可行性,在Matlab Simulink模塊給定模型6個方向的位姿,仿真得到6個作動器的伸長量,然后在ADAMS仿真模型中施加相同的位姿驅動進行運動學仿真,同時監測各作動器的伸縮量,通過與Matlab仿真結果進行對比分析來驗證反解算法的正確性。仿真結果對比圖如表1所示。
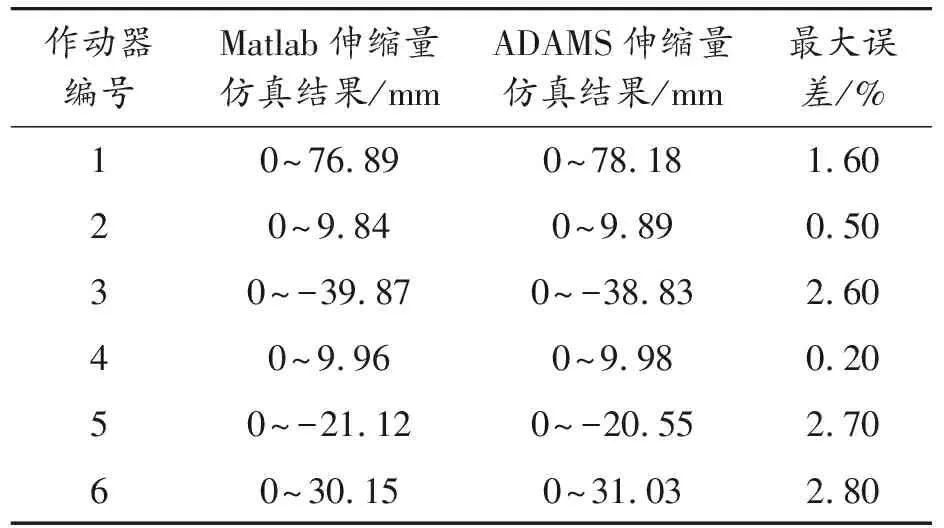
表1 作動器伸縮量仿真結果
通過對比發現,ADAMS位姿仿真結果值與Matlab輸入值最大誤差為2.7%,誤差比較小,在合理的誤差允許范圍內,原因可能是Matlab程序添加坐標時選取近似值;作動器仿真結果值與Matlab仿真結果最大誤差為2.8%,誤差不超過10%,也在誤差允許的范圍內,主要原因有2個:① 兩軟件迭代方式不同所產生的誤差;② Matlab程序添加坐標時選取近似值所產生的誤差。
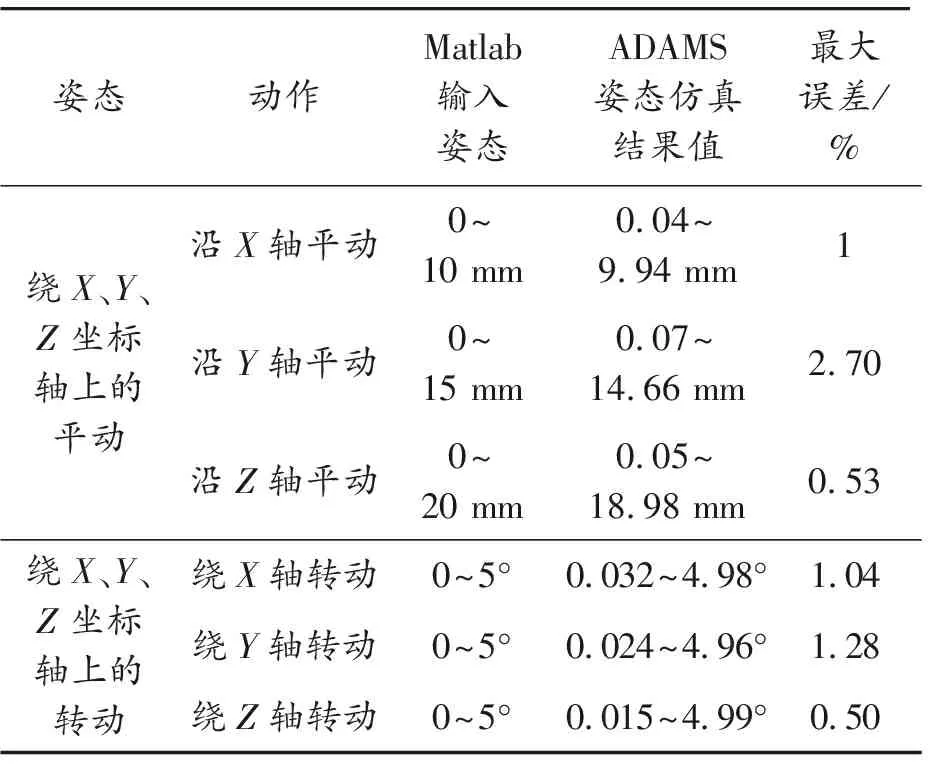
表2 平臺位姿仿真結果
4 結束語
本文運用ADAMS與Matlab兩個軟件進行仿真對比分析,總結了兩種仿真產生誤差的原因,證明了反解算法的正確性以及ADAMS模型的合理性,為后續的優化提供了重要的參考價值,同時也為該平臺的搭建和精確控制奠定了基礎。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19