基于FPGA的二維PSD信號處理系統設計
2019-11-18 05:43:18張天宇賈方秀周強李浩
中國測試 2019年8期
張天宇 賈方秀 周強 李浩
摘要:為實現對入射光斑位置坐標的精確測量,設計以FPGA為核心的二維PSD信號處理系統。針對窄脈沖激光照射下前置放大放電路,建立相應等效噪聲模型,引入頻率對電路輸出電壓噪聲的影響得到提高電路分辨率措施。搭建自動增益控制電路,并結合FPGA給出的相應增益控制策略實現對幅值大動態范圍變化的光電流合理放大。設計峰值脈沖檢測電路實現窄脈沖信號峰值的準確測量,其測量誤差小于3%。通過FPGA設計狀態機實現A/D芯片模式配置和數據讀取,并搭建相應坐標解算模塊和串口模塊,實現入射光斑坐標的解算與傳輸。實驗表明該系統測量非線性度小于10μm,測量精度高。
關鍵詞:位置敏感探測器;窄脈沖信號處理;自動增益控制電路;峰值檢測電路;FPGA
中圖分類號:TP273 文獻標志碼:A 文章編號:1674-5124(2019)08-0135-05
收稿日期:2018-07-17;收到修改稿日期:2018-08-21
基金項目:國家自然科學基金(61201391)
作者簡介:張天宇(1994-),男,山東德州市人,碩士研究生,專業方向為機械電子。
0 引言
位置敏感探測器(PSD)因其響應速度快,無死區,位置輸出信號只與入射光的重心位置有關,對光斑形狀無嚴格要求[1]等優點特別適用于位移、距離、滾轉角等高精度非接觸快速測量[2-4]。而PSD信號處理系統性能好壞直接影響最終測量精度。江孝國等[5]建立PSD等效噪聲模型并進行測試分析,給出光電流與位置分辨率之間的關系。劉媛等[6]對轉換電路各環節進行敏感性分析,得出了元器件性能參數對電路噪聲的影響規律。吳立雄等[7]對改進二維PSD線性度進行研究,指出將入射光斑控制在A區能有效提高測量精度。楊海馬等[8]設計了基于FPGA的PSD多路光電數據采集系統。史狄等[9]設計了基于DSP的二維PSD信號處理系統。賈天祥[10]設計了基于LabVIEW的PSD自動測試系統。
傳統PSD信號處理系統均針對直流激光源設計,而當PSD接受峰值功率相同時直流激光源消耗功率遠大于脈沖激光源。因此本文針對窄脈沖激光源設計相應的信號處理系統,分析脈沖激光照射下提高電路分辨率的措施,通過自動增益控制電路和峰值檢測電路實現PSD與激光照射器距離大動態范圍變化時響應光電流準確測量。最終通過FPGA實入射光斑位置坐標解算。
1 二維PSD工作原理
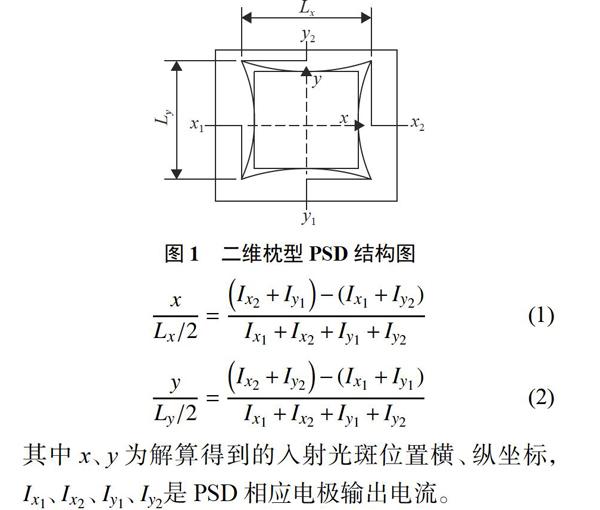
PSD不僅是光電轉換器,更是光電流分配器件,根據各電極上收集到的電流信號比例即可確認入射光的位置。二維枕型PSD結構如圖I所示。
其中,x1,x2,y1,y2分別是PSD 4個電極,Lx,Ly分別為x軸方向和y軸方向PSD光敏面長度,當以器件中心為原點時入射光位置坐標與電流關系式為:其中x、y為解算得到的入射光斑位置橫、縱坐標,Ix1、Ix2、Iy2、Iy2是PSD相應電極輸出電流。
2 系統方案
本文中PSD信號處理系統采用脈沖激光源,并設計相應峰值保持電路保證A/D能夠采集到正確的脈沖峰值。同時,為避免因電流信號過于微弱或過大飽和導致無法精確測量的情況,需設計適用于大動態范圍的自動增益控制電路對信號進行合理放大。圖2所示為信號處理系統硬件框圖。
PSD經脈沖激光照射后產生的相應光電流,被前放電路轉換為電壓。自動增益控制電路根據FPGA給出的控制策略將該電壓放大適當倍數,最終由峰值檢測電路得到該脈沖電壓峰值。同時峰值時刻判斷模塊將脈沖電壓峰值到來信息傳遞給FPGA并由FPGA控制A/D電路開啟轉換得到數字電壓信號,最后通過FPGA解算得到入射光斑重心位置坐標。
2.1 前放電路
電路分辨率與電路噪聲直接相關,因此需對電路噪聲進行分析。前放電路中光、暗電流和PSD極間電阻[11]以及前放電路反饋電阻,運算放大器自身[12]均會產生噪聲,其等效噪聲模型如圖3所示。
is是由光電流Io和暗電流Id產生的散粒噪聲,iie和if分別是極間電阻Rie和反饋電阻Rf產生的熱噪聲,en則是運放自身產生的電壓噪聲。Cf為補償電容。前放電路信號增益As定義為運放輸出電壓值Vo與負相輸入端輸入電流值Io之比,噪聲增益An定義為當輸入噪聲存在于運算放大器同相輸入端時檢測放大電路輸出噪聲eno與輸入噪聲eni之比。根據定義結合運放“虛短”和“虛斷”特性可得:其中:(Cf+Cj)),tf為運放單位增益帶寬。
考慮頻率影響,電路輸出電壓V和輸出電壓噪聲Vno分別為:其中,fl和fh分別為積分下限頻率和上限頻率。針對脈寬為納秒級脈沖信號,電路分辨率更易受瞬時噪聲值的影響而非噪聲RMS值影響。該情況下信號峰值與噪聲峰值之比十分重要,因此以K=Vo/(Vno×CF)作為衡量電路分辨率的指標。其中CF(波峰因數)是噪聲峰值與噪聲RMS值的之比,通常取CF=6.6[13]。對于一確定PSD信號處理系統,上述公式中除補償電容Cf以外其余參數均為定值。因此令dK/dCf=0,即可求得使K值最大時的Cf值,此時電路分辨率也將最大。
2.2 自動增益控制電路
為使后續電路便于精確測量輸出電壓,幅值既不能過小淹沒在噪聲中,又不能過大超出測量范圍。因此當電源供電5V時,輸出電壓信號范圍為0.5~4.7V。自動增益控制電路通過一個運放搭配不同增益電阻實現,這樣電路只有一級,可避免引入過多噪聲。同時相鄰兩放大系數之間應保證過渡階段輸出電壓變化范圍限制在0.5~4.7V。
自動增益控制策略如圖4所示,光電流I既適用于放大系數A2又適用于放大系數A3,當放大系數為A2時,Io是該區間內的最大電流值,此時其對應輸出電壓A2Io應小于4.7V;而當放大系數變為A3時,Io是該區間內的最小電流值,因此其對應輸出電壓A2Io應大于0.5V。
2.3 峰值檢測電路
峰值檢測電路如圖5所示。該電路通過放大器、二極管等電子器件搭建模擬電路實現對脈沖信號峰值的檢測。
該電路主要由3個模塊組成:用來保持脈沖信號峰值的模擬存儲器,即電容器,它存儲電荷的功能能使它充當一個電壓存儲器;當峰值出現時用來對電容充電的運放OP1和單向電流開關二極管D;使電容電壓能夠跟隨輸入電壓的器件運放OP2。
當峰值到達時,OP1輸出正向電壓,二極管D導通,電容C充電并跟隨峰值電壓。而當峰值之后OP1輸出電壓減小,由于二極管D單向導通特性使電容C上電壓繼續保持峰值大小并通過OP2將該峰值電壓輸出。
3 FPGA邏輯設計
本文采用EP4CE22作為主控芯片完成解算控制功能,其主要由ADC邏輯控制模塊,坐標解算模塊,增益控制策略模塊和串口模塊組成,如圖6所示。
ADC邏輯控制模塊主要通過Verilog HDL編寫狀態機實現的。本文采用A/D芯片為MAX1304,其配置時序和讀取時序。配置寄存器時,將CS和麗豆設為低電平,然后將DO~D7位數據裝載到并行總線,再將麗頁置為高電平。配置數據在麗豆的上升沿鎖存。
隨后將CONVST由低拉高,開啟A/D轉換。當EOLC由高變低時,A/D轉換結束,通過RD和CS信號的配合可讀取出相應的數據。因二維PSD有4路電極輸出,因此需要讀取ch0~ch3通道數據。
根據以上時序,ADC邏輯控制模塊狀態圖如圖7所示。
當ADC邏輯控制模塊讀取4路通道數據完成后將該信息同時傳遞給增益控制策略模塊和坐標解算模塊。增益控制模塊會根據本次A/D采集電壓信號大小決定下次自動增益控制電路增益大小,而坐標解算模塊則主要負責將該4路電壓信號轉換為浮點數并進行浮點數運算進而得到光斑坐標。最終解算得到的坐標信息將會通過如圖8所示串口模塊發送給上位機。
4 實驗驗證
采用實驗裝置進行實驗。該實驗裝置由激光源,光具座和信號處理系統組成。激光源可輸出脈寬固定,頻率、功率可調的平行脈沖激光束。光具座作為承載鏡頭裝置,由俯仰臺和旋轉臺組成,可分別作旋轉和俯仰運動。信號處理系統則包括鏡頭、PSD和處理電路。PSD置于鏡頭內部且通過機械安裝保證鏡頭光軸中心與PSD感光面中心重合,后續處理電路通過導線與PSD連接。實驗時鏡頭與光具座固連且鏡頭中心與俯仰臺,旋轉臺運動中心重合。將激光源與光具座固定在帶有螺紋孔的底板上且令激光源鏡面與鏡頭保持平行且保證激光源發射平行光束可完全覆蓋鏡頭,以該位置視為旋轉與俯仰運動的0°。
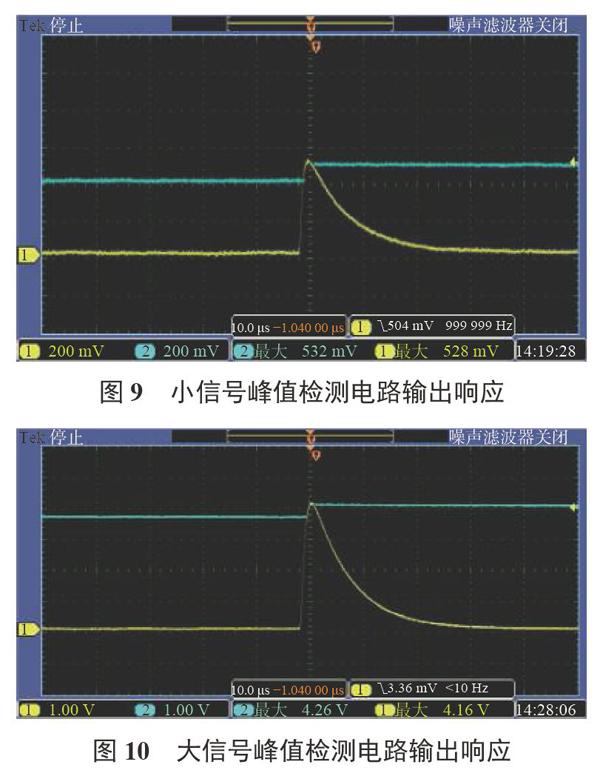
首先測試該信號處理系統模擬電路部分性能即峰值檢測電路檢測精度。令光具座旋轉與俯仰角度為0°,脈沖激光源脈沖頻率50HZ,改變激光源發射功率分別測試小信號和大信號下峰值檢測電路檢測精度,結果如圖9,圖10所示。
圖中黃色線為峰值檢測電路輸入波形,藍色為輸出波形。當輸入電壓528mV時,電路輸出為532mV,而當電壓輸入4.16V時,輸出為426V。檢測誤差小于3%,能夠滿足大動態范圍內對信號的準確檢測。
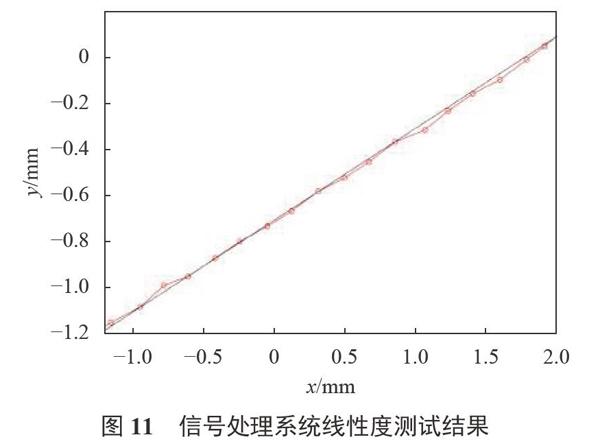
其次測試該系統非線性度。固定鏡頭俯仰角度為一定值,令鏡頭分別像左右兩個方向做旋轉運動,入射光斑將在PSD上形成一條直線,直線上相鄰個光斑距離為l=ftan△θ,其中f為鏡頭焦距,該值為17.08mm,△θ為相鄰兩次旋轉運動角度之差,值是1°。測試結果如圖11。
圖中x,y分別為PSD橫縱坐標軸,紅色光斑為入射光斑測量結果,相鄰兩光斑距離即為l,紅色光斑形成的軌跡即為入射光斑運動軌跡,黑線為理論結果,可以看出PSD信號處理系統測量非線性度在10μm以內。
5 結束語
本文設計了以FPGA為核心的二維PSD信號處理系統。通過建立前放電路等效噪聲模型,得到使電路在脈沖激光照射下分辨率最高時補充電容Cf取值原則。所搭建的自動增益控制電路和峰值檢測電路能有效保證大動態范圍變化光電流的準確檢測,測量誤差小于3%。實驗結果表明該信號處理系統測量非線性度在10μm之內,測量精度高。可廣泛應用于非接觸式的位移、距離、滾轉角測量。
參考文獻
[1]黃梅珍.位置敏感探測器的研究[D].杭州:浙江大學,2001.
[2]段潔,孫向陽,蔡敬海,等.PSD在激光位移檢測系統中的應用研究[J].紅外與激光工程,2007,36(S1):281-284.
[3]王飛.近距離光電測距技術的研究[D].太原:中北大學,2013.
[4]劉振亞,高敏.全捷聯激光制導彈藥雙透鏡滾轉角測量方法[J].激光與紅外,2018,48(2):164-168.
[5]江孝國,李洪,楊興林,等.位置敏感探測器測量電路噪聲分析[J].信息與電子工程,2010,8(1):96-100.
[6]劉媛,趙美蓉,宋樂,等.PSD測距電路降噪方法[J].激光與紅外,2012,42(9):1026-1030.
[7]吳麗雄,黃玉珠.改進二維光電位置傳感器及線性度實驗研究[J].中國測試,2006,32(2):142-144.
[8]楊海馬,傅思勇,王建宇,等.基于FPGA的PSD多路光電數據采集系統設計[J].儀表技術與傳感器,2012(8):48-50.
[9]史狄,孫利群,章恩耀.基于TMS320F2812的二維PSD信號處理系統的設計[J].儀表技術與傳感器,2013(4):35-36,40.
[10]賈天祥,徐熙平,董文博.二維位置敏感探測器(PSD)自動測試系統[J].儀表技術與傳感器,2012(10):67-69.
[11]NARAYANAN C,BUCKMAN A B ,BUSH V.Noiseanalysis for position-sensitive detectors[J].IEEE TransInstrum.Meas,1997,46(5):1137-1144.
[12]劉小林,王擁軍.微弱紅外光信號檢測放大電路噪聲分析及噪聲匹配的研究[J].軟件,2012,33(10):38-41.
[13]劉樹棠,朱茂林,榮玫.基于運算放大器和模擬集成電路的電路設計[M].西安:西安交通大學出版社,2009:280-281.
(編輯:劉楊)
