鼴鼠多趾結構特征仿生旋耕刀設計與試驗
2019-11-28 08:52:10楊玉婉馬云海蔣嘯虎李金光
農業工程學報 2019年19期
楊玉婉,佟 金,馬云海,蔣嘯虎,李金光
(1.西北農林科技大學機械與電子工程學院,楊凌712100;2.吉林大學工程仿生教育部重點實驗室,長春130025;3.吉林大學生物與農業工程學院,長春130025)
0 引 言
旋耕機耕作功耗較大,約是其他翻整地機械能耗3~6 倍[1-2]。其中,旋耕刀作為旋耕機的主要觸土部件[3-6],其幾何結構對旋耕機工作質量、功率消耗等具有重要的影響[7]。因而,通過優化旋耕刀幾何結構來降低旋耕機功耗是研究學者們的重要研究方向。例如,鋸齒型旋耕刀[8]具有較高的除草效率和較好的耕作性能;通過分析傳統型、半幅寬型和直型旋耕刀[9]在不同轉速下的耕作扭矩和功耗情況,得知直型旋耕刀的耕作扭矩和功耗最小;不同刃口的直型旋耕刀[10]可以形成不同的溝底結構,特別是內刃口旋耕刀切土時土壤回填率高、溝壁未被壓實、功耗較小;具有鼴鼠爪趾趾尖結構特征的仿生型旋耕-碎茬刀[11],土壤破碎率和秸稈破碎率均滿足國標要求,且功耗要小于傳統刀片;此外,仿鼴鼠足趾排列的旋耕-秸稈粉碎鋸齒刀片[12],在地表秸稈覆蓋率為0和100%時,其扭矩高于國標旋耕刀,在地表秸稈覆蓋率為50%,其扭矩低于國標旋耕刀等等。可以看出,目前的研究主要集中在優化旋耕刀刃口結構來減小其用于除草、破碎秸稈、壓實溝壁等的扭矩從而實現旋耕機功耗的降低,然而,旋耕機80%的功耗主要消耗在旋耕刀切土和拋土過程中[13],那么,通過優化旋耕刀幾何結構來減小其切土扭矩從而達到旋耕機減阻降耗的目的是本文的研究目標和意義。
仿生方法對解決農業工程領域中觸土部件阻力大、能耗高的問題具有極大潛力[14-15]。李建橋等[16]學習蜣螂體表觸土部位結構特征,設計了凸包型仿生犁,通過土槽試驗得到減阻率為6.6% ~12.7%。Ren 等[17-18]根據臭蜣螂頭部唇基結構特征和體電位,設計了凸包型和條紋型仿生滲電推土板,結果表明在通電12 V 的條件下,仿生推土板的推土阻力降低了15%~41%。鼴鼠是一種進行嚴格地下生活的土壤洞穴動物,僅用一個晚上就可以挖掘出91 m 長的洞穴,其優異的挖掘能力,被稱為“活的挖掘機”[19]。值得注意的是,鼴鼠的每個手掌都有5 個寬大而鋒利的爪趾。當鼴鼠挖掘土壤時,5 個爪趾張開并處于同一平面協同工作,從而實現高效切土,這種結構被稱為多趾組合結構[20]。而且,五個爪趾趾尖輪廓曲線在切土過程中起到重要的滑切和刺入作用,增加了切土的高效性。這與若蟲時期蟬的前爪切土作用類似,爪趾的滑切行為有助于減小土壤摩擦力和刺入阻力[21]。由此可知,多趾組合結構和趾尖輪廓曲線對鼴鼠的切土性能具有重要影響。
本文將基于鼴鼠多趾組合結構和趾尖輪廓曲線,設計出具有仿生結構特征的旋耕刀,并通過田間試驗來研究仿生結構特征對旋耕機田間耕作性能的影響。而且,將傳統型旋耕刀作為對照組,其田間耕作性能用于對比分析。
1 仿生旋耕刀設計
1.1 鼴鼠多趾組合結構和趾尖輪廓曲線特征分析
根據文獻[22]可知,鼴鼠前肢手掌多趾結構(圖1)是一種多窄齒組合結構,且相鄰齒間間距可調整。其中,每個爪趾趾長與趾寬的比值m 范圍為2.63 ~3.41,相鄰爪趾間間距與趾寬的比值n范圍為1.12 ~1.60。
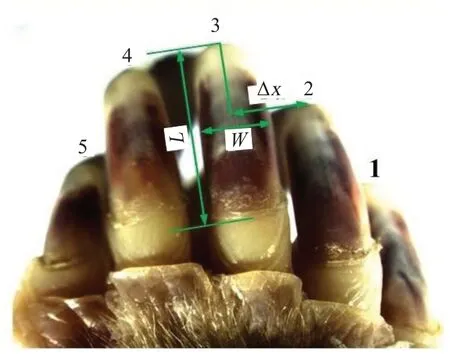
圖1 鼴鼠前肢手掌五趾結構[22]Fig.1 Five-claw combination structure of mole rats[22]
鼴鼠前肢手掌五趾趾尖的輪廓曲線對鼴鼠的切土性能具有重要影響。通過逆向工程方法獲得5 個爪趾的點云數據,然后在逆性工程軟件Imageware 中提取出爪趾趾尖輪廓曲線的點云,并在AutoCAD 2014 軟件中得到輪廓曲線點的坐標值,最后將坐標值導入到數據處理軟件Matlab 中進行量化分析,如圖2 所示。基于最小二乘法擬合5 個爪趾的趾尖輪廓曲線,擬合方程均為二次高斯方程。5個擬合方程的決定系數(R2)均大于0.95,誤差平方和均小于0.05,說明擬合曲線接近于5 趾輪廓曲線,能夠精確描述5趾趾尖輪廓曲線特征。
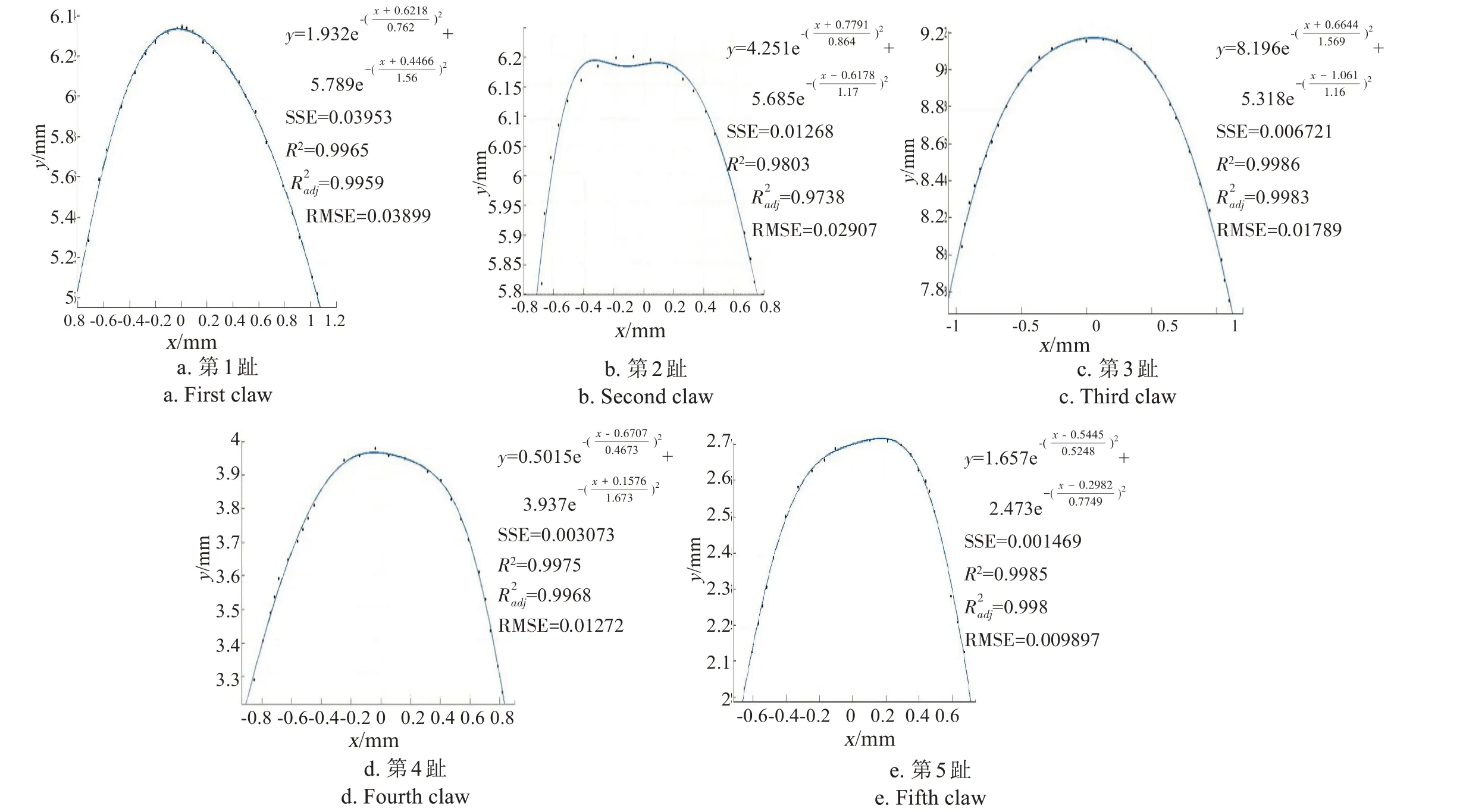
圖2 鼴鼠5個爪趾趾尖輪廓擬合曲線和擬合方程Fig.2 Fitting curves and equations of five claws tips of mole rats
1.2 仿生旋耕刀設計
傳統旋耕刀由刀柄、具有側切刃的側切面、過渡刃的過渡面和正切刃的正切面組成[23],如圖3a 所示。旋耕刀側切面具有切開土垡、切斷、推開地面秸稈或雜草等功能,正切面橫向切開土壤,具有切土、碎土和翻土的功能,使得旋耕刀整刀功耗較大部分都消耗在正切面上。根據鼴鼠前足爪趾結構特征,結合旋耕刀結構,將5趾組合結構和趾尖輪廓特征曲線應用于旋耕刀正切面上,第1和2趾、第3趾、第4和5趾依次排列于正切刃、刀軸回轉半徑、正切面末端邊緣,如圖3b 所示。本研究選用常用的旋耕刀參數,回轉半徑R為245 mm和工作幅寬b 為60 mm,材料選用60Si2Mn 鋼。根據旋耕刀尺寸范圍,設置5趾結構總寬w(0圖3b)為60 mm,比值m 參照原型結構的數值[22],由于相鄰趾間距的可調整性[22],n 值的改變將影響旋耕刀的工作性能,因而選擇比值n 為本試驗的一個影響因素。5 趾結構的傾斜角度θ(圖3b)對旋耕刀的滑切性能有重要影響,因而選擇傾角θ 為本試驗的另一個影響因素。對于趾尖輪廓曲線,參考第1.1節的擬合曲線方程進行設計。旋耕刀耕作時不僅要受到土壤的侵蝕和磨損,還會受到石礫的沖擊、雜質的纏繞等,會造成旋耕刀劇烈磨損和彎折,這就對旋耕刀的材質、機械性能要求較高。本文在旋耕刀毛坯基礎上通過線切割加工工藝在旋耕刀正切面上加工出仿生結構特征(加工精度為±0.1 mm,表面粗糙度為0.3~0.8 μm),再對加工表面進行打磨處理,最后進行淬火、回火等熱處理工藝。在前期的土槽試驗中,n 取值為1.25、1.50 和1.75,θ 取值為50 °、60 °和70 °,經過正交試驗,得到優化的仿生型旋耕刀結構參數為:n=1.25和θ=60°。本文根據優化結果加工仿生型旋耕刀,并和傳統型旋耕刀用于田間試驗與分析。
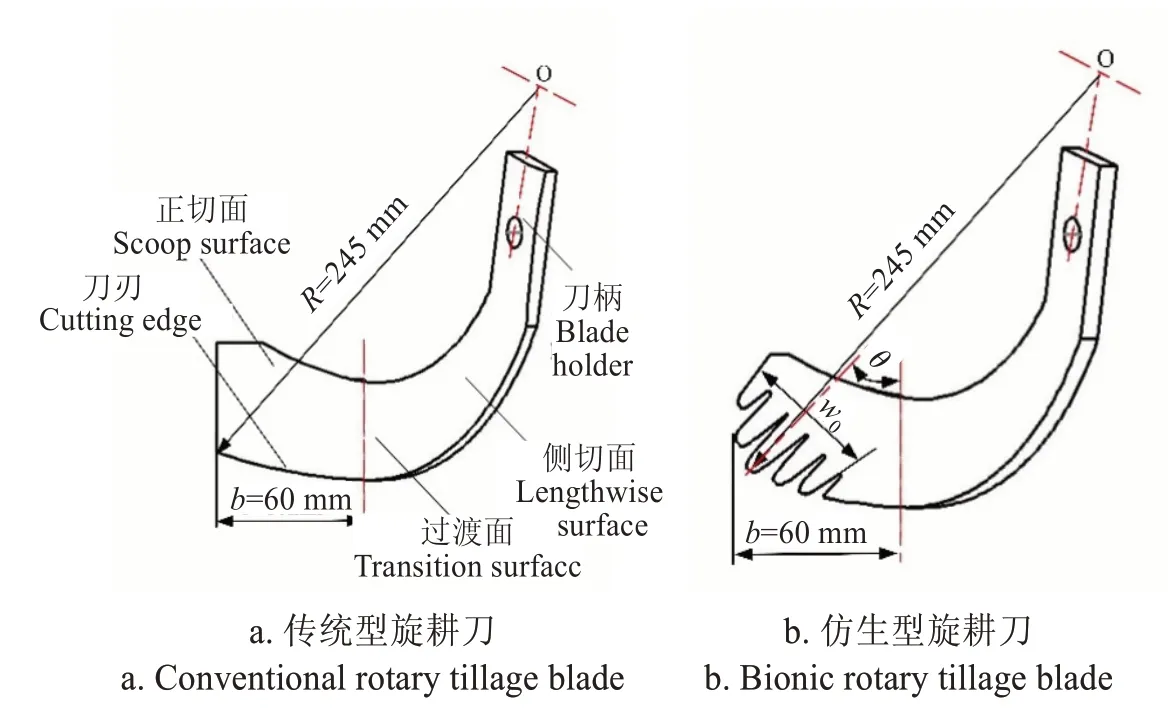
圖3 旋耕刀結構示意圖Fig.3 Configurations of rotary tillage blades
2 田間試驗
2.1 試驗材料
田間試驗于2018 年10 月中旬在吉林農業大學試驗農場進行,選擇的試驗地塊,地表平整無坡度,土壤類型為黑壤土,前茬作物為玉米,耕作方式為平作。試驗前,用摟草機清理地表過多的殘留物。根據GB/T 5668-2008[24]旋耕試驗要求,測得耕前地表植被覆蓋量為0.36 kg/m2,耕前地表平整度為2.69 cm,滿足旋耕作業要求。對試驗區0 ~50、50 ~100、100 ~150 和150~200 mm 的土層用SC-900 型堅實度儀分層測量其土壤堅實度,用TDR-300型水分儀分層測量其土壤含水量,用環刀法[25]分層測量其土壤容重,結果如表1。
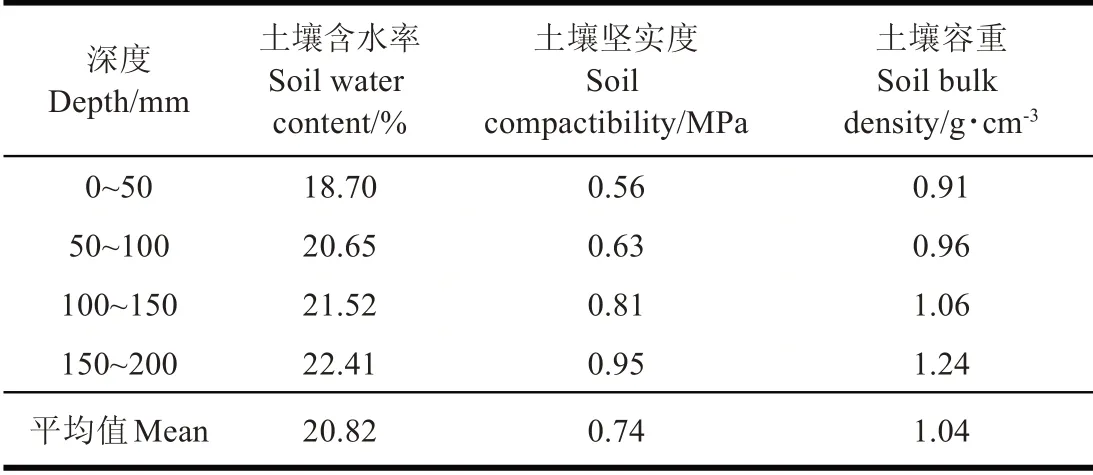
表1 試驗區土壤物理性質Table 1 Soil physical properties in test plots
試驗系統包括動力輸出設備、旋耕機和測試系統,如圖4a 所示。動力輸出設備為久保田KUBOTA-M954 輪式拖拉機,發動機功率70.8 kW,可輸出2 種轉速分別為540 和720 r/min。旋耕機由天津拖拉機制造有限公司生產的1GQN-230 框架式旋耕機,作業幅寬230 cm。測試系統包括扭矩測量系統、轉速測量裝置和耕深測量裝置,其中扭矩測量系統是由扭矩傳感器(CYB-803S 型,量程0~±1000 Nm)和農機動力學參數遙感儀組成,扭矩傳感器與拖拉機動力輸出軸和萬向聯軸器連接,農機動力學參數遙感儀包括電源、無線動態數據采集器、天線和計算機組成,如圖4b~4c 所示。旋耕機轉速通過SW6234C 激光轉速儀測定和確定;耕深測量裝置安裝在旋耕機后托板上,通過超聲波在空氣中傳播與反射的原理來控制耕深(圖4a),首先根據該行程的作業耕深得到刀軸軸線距未耕地表的間距d1,即為刀軸回轉半徑與耕深的差值;然后調節后托板與旋耕機刀軸軸線平行,通過拖拉機液壓升降裝置調節旋耕機緩慢上下移動,直至耕深測量裝置的測得值在d1±1cm 范圍內。農機動力學參數遙感儀的工作原理是扭矩傳感器受到外力的作用,將力信號轉換為電信號,并被傳輸到無線動態數據采集器中,然后將電信號發射出去,通過天線接收到電信號并轉換成力信號傳輸給計算機,最后顯示在數據處理軟件的界面中。
2.2 試驗方法
在田間耕作性能試驗中,傳統IT245 型旋耕刀和仿生型旋耕刀各62把按雙螺旋線對稱排列方式安裝在2行旋耕機上,測量和觀察2 種旋耕刀在不同機組前進速度、轉速和耕深條件下的整機扭矩、功耗、土壤破碎率和溝底壓實現象。根據GB/T 5668-2008[24]旋耕作業參數要求,機組前進速度設置為1、2、3、4和5 km/h,轉速設置為254和267 r/min,耕深設置為80、120 和160 mm。當機組前進速度變化時,轉速和耕深分別為254 r/min 和120 mm;當轉速變化時,機組前進速度和耕深分別為3 km/h 和120 mm;當耕深變化時,機組前進速度和轉速分別為3 km/h和254 r/min。試驗時,每個試驗區長50 m,兩端各留出取10 m 作為過渡區,中間30 m 為數據采集區。每一工況測試3個行程,最后取平均值用于結果分析。
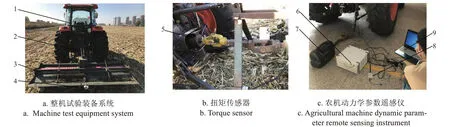
圖4 試驗裝備系統Fig.4 Test equipment system
2.3 試驗指標
2.3.1 旋耕機功率
拖拉機需要提供足夠的功率來滿足旋耕機切土時的功率消耗。因此,旋耕機功耗應低于拖拉機的額定功率。根據文獻[10]中旋耕機功率的計算方法,可得到本文旋耕機的作業功率:
式中P為旋耕機耕作功率,kW;T為旋耕機耕作扭矩,N·m;n0為旋耕機刀軸轉速,r/min,其中,旋耕機耕作扭矩通過扭矩測量系統獲得。
2.3.2 土壤破碎率
土壤破碎率是評價旋耕刀田間耕作性能的重要指標。根據GB/T 5668-2008[24]的土壤破碎率測量方法,在已耕地上測定0.5 m×0.5 m 面積內的全耕層土塊,土塊大小按其最長邊分為小于4、4~8 cm 和大于8 cm 三級。并以小于4 cm 的土塊質量占總質量的百分比為土壤破碎率,如式(2)所示。每個行程隨機測量5 點。

式中Sb為土壤破碎率,%;m總為測定區內全耕層土塊總質量,g;m4為測定區內最長邊大于4 cm的土塊質量,g。
2.3.3 溝底壓實情況
旋耕刀在切土過程中有壓實溝底的現象[26-27]。壓實現象是刀片背面快速滑離土壤時,對溝底土壤表面施加應力而形成的較薄一層壓實面,造成該層土壤結構破壞和土壤空隙度降低等現象[10]。特別是,這樣的一層土壤壓實面會阻礙空氣和水分的移動,也影響植物根系植入土內,增加種苗的死亡率。同時,壓實過程會增加旋耕刀耕作功耗,降低耕作效率。因此,溝底壓實現象對于評價旋耕刀田間耕作性能的具有重要意義。在旋耕作業完成之后,用小鏟輕輕移出耕層土塊,露出溝底,且不破壞溝底狀況,并拍照觀察。
2.3.4 旋耕機其他田間耕作性能測試項目和方法
根據GB/T 5668-2008[24]中對旋耕機耕作質量的規定和測量方法,本研究的旋耕機其他田間耕作性能測試項目和方法如下:
1)耕深穩定性
用鋼尺測得,沿機組前進方向每隔2 m 左右兩側各測定一點,每個行程總測點數不少于20 個,并計算行程的耕深平均值和工況的耕深平均值,以及行程的耕深穩定性和工況的耕深穩定性[24],計算方式如下:
行程的耕深平均值:

式中aj為第j 個行程的耕深平均值,mm;aji為第j 個行程第i個點的耕深值,mm;nj為第j個行程的測定點數。
工況的耕深平均值:

式中a為工況的耕深平均值,mm;N為同一工況的行程數。
行程的耕深穩定性:

式中Sj為第j個行程的耕深標準差,mm;Vj為第j個行程的耕深變異系數,%;Uj為第j個行程的耕深穩定性系數,%。
工況的耕深穩定性:
式中S為工況的耕深標準差,mm;V為工況的耕深變異系數,%;U為工況的耕深穩定性系數,%。
2)耕寬穩定性
用皮卷尺測得,沿機組前進方向每隔2 m 測定一次耕寬,每個行程總測點數不少于20 個,并計算行程的耕寬平均值和工況的耕寬平均值,以及行程的耕寬穩定性和工況的耕寬穩定性,計算方式按照耕深相關數值的計算方法。
3)植被覆蓋率
在耕前,在測量區內對角線上取5點,每點按1 m2面積緊貼地面剪下露出地表的植被,稱其質量Wq,并計算出5 點的平均值(一般地,耕前地表植被覆蓋量應不大于0.6 kg/m2)。按照該測量方法,在耕后,測得1 m2面積緊貼地面的植被,稱其質量Wh,然后計算植被覆蓋率:

式中Fb為植被覆蓋率,%。
4)地表平整度
沿垂直于機組前進方向,在地表最高點以上取一水平基準線,在其適當位置上取一定寬度(與樣機耕寬相當),分成10等分,測定各等點至地表的距離h0,如圖5所示。然后,按照耕深相關數值的計算方法計算平均值和標準差,并以標準差的平均值來表示其平整度。
5)土壤蓬松度
根據地表平整度的測量方法,在耕前,測得水平基準線各等點至地表的距離h1。然后按照如下方法計算出土壤蓬松度:

式中Pt為土壤蓬松度,%;h0為耕后水平基準線至地表的距離,mm;h1為耕前水平基準線至地表的距離,mm。
3 試驗結果與分析
3.1 旋耕機功率
圖5 為傳統型和仿生型旋耕刀在不同前進速度、轉速和耕深條件下的整機功率變化情況。由圖可知,傳統型和仿生型旋耕刀在不同耕作條件下的整機功率變化趨勢相同,但是仿生型旋耕刀的整機功率總小于傳統型旋耕刀的整機功率。如圖5a所示,當前進速度從1 km/h 增加到2 km/h 時,整機功率迅速增大;前進速度增加到3 km/h 時,整機功率較快減小;最后,前進速度增加到5 km/h 時,整機功率緩慢增加。這與Ghosh[28]研究旋耕刀在不同前進速度下耕作時,扭矩線性增加的結果類似。該過程中,仿生型旋耕刀的整機功率比傳統型旋耕刀的整機功率小8.80%~22.15%,平均減小16.88%。如圖5b所示,傳統型和仿生型旋耕刀的整機功率均隨轉速的增加而減小,這與Matin[10]研究旋耕刀在轉速125~375 r/min下耕作時的變化規律類似,其中仿生型旋耕刀的整機功率比傳統型旋耕刀的整機功率小15.38%~18.61%,平均減小17.00%。如圖5c所示,傳統型和仿生型旋耕刀的整機功率均隨耕深的增加而增大,同樣地,Ghosh[28]在研究旋耕刀在不同耕深下耕作時,扭矩也有這樣的變化規律,其中仿生型旋耕刀的整機功率比傳統型旋耕刀的整機功率小10.83%~35.97%,平均減小21.80%。
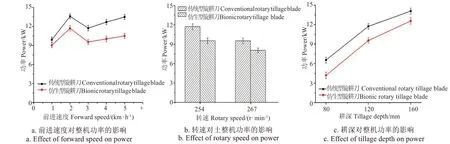
圖5 不同耕作條件下的旋耕機功率Fig.5 Power of rotary cultivators at different tillage conditions
整體來看,仿生幾何結構對旋耕刀的整機功率有顯著影響。鼴鼠前肢手掌多趾組合結構和趾尖輪廓曲線對降低旋耕機功耗起著重要作用,這是由于當仿生旋耕刀入土時,多趾結構較容易刺入土壤,并且趾尖輪廓曲線具有較好的滑切性能,可減小摩擦阻力,從而使得仿生旋耕刀具有較好的入土性能,這類似于仿生切茬刀[11-12]的鋸齒狀結構性能;隨著仿生旋耕刀入土深度的增加,多趾組合結構將起著重要的切土作用,由于該結構可以有效地減小土壤失效時的破裂半徑[29],使得土壤失效楔塊變小,從而切削阻力明顯降低。因此,多趾組合結構較低的土壤切削阻力和五趾趾尖的優異入土性能和滑切效果,才使得仿生型旋耕刀耕作時具有減阻降耗性能。
3.2 土壤破碎率
如圖6a 所示,傳統型和仿生型旋耕刀的整機土壤破碎率隨著前進速度從1 km/h 增加到5 km/h 均降低。如圖6b 所示,傳統型和仿生型旋耕刀的整機土壤破碎率隨著轉速從254 r/min 增加到267 r/min 均增加。如圖6c 所示,傳統型和仿生型旋耕刀的土壤破碎率隨著耕深從80 mm增加到160 mm 均稍微降低。由于旋耕機土壤破碎率大小與切土節距具有重要關系[30],當前進速度增加時,旋耕刀每次切土量增加,切土節距增大,使得被切土塊較大,因而旋耕機的土壤破碎率降低;當轉速增加時,旋耕刀每次切土量減少,切土節距減小,使得被切土塊較小,因而旋耕刀的土壤破碎率增大;當耕深增大時,雖然旋耕刀切土節距不變,但是切土體積增加,被切土塊較大,因而旋耕刀的土壤破碎率隨著降低。整體來看,傳統型和仿生型旋耕刀在不同耕作條件下的整機土壤破碎率在數值上相差不大,均在95%以上,滿足旋耕機田間耕作要求[24]。
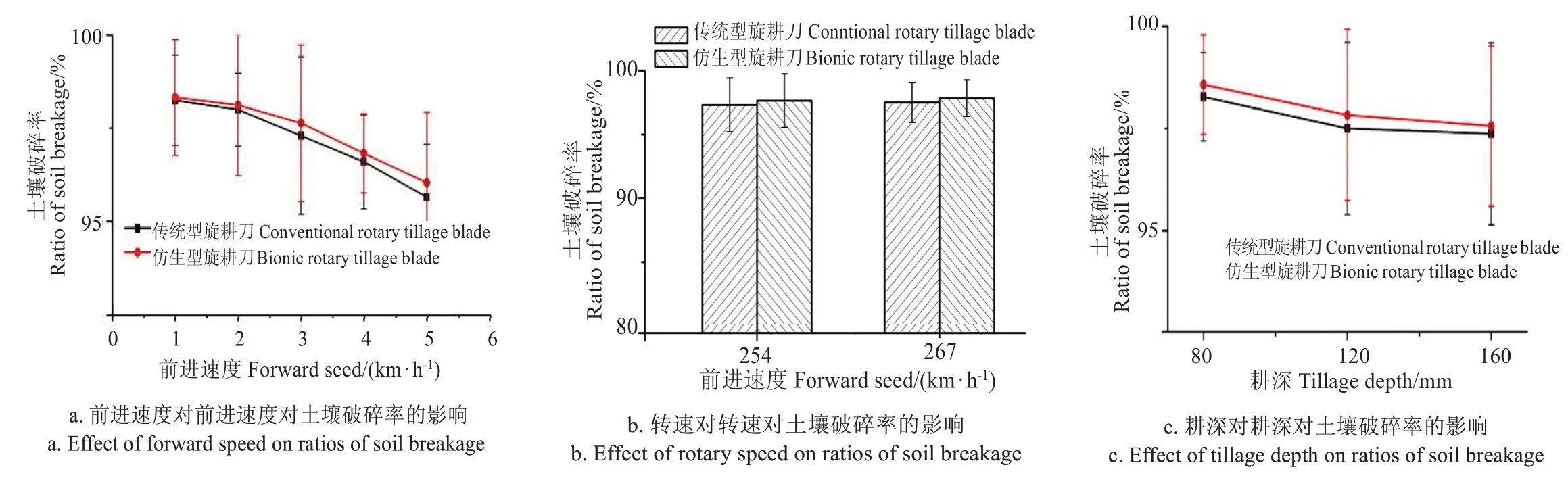
圖6 不同耕作條件下的旋耕機土壤破碎率Fig.6 Ratios of soil breakage of rotary cultivators at different tillage conditions
3.3 溝底壓實情況
圖7 為傳統型和仿生型旋耕刀對溝底的壓實情況。由于仿生型旋耕刀的正切面具有多趾組合結構特征(圖3b),因而在切土時會在溝底產生很多劃痕,從而形成粗糙的溝底(圖7b),減弱了壓實現象。然而,傳統型旋耕刀,具有較鈍的正切面刃口,耕后的溝底光滑,有壓實現象(圖7a),從而阻礙秧苗根系的正常生長。在切土過程中,傳統型旋耕刀正切刃背面快速滑切出溝底,較高的應力作用于溝底表面,產生一層被壓實的表面,這種現象出現在傳統型旋耕刀所有的耕作條件。而且,由圖7a可看出,傳統型旋耕刀耕后的溝脊高而寬,使得溝底平整度降低,耕作效果不佳。然而,仿生型旋耕刀可以顯著地降低耕后溝底被壓實的風險,降低刀背被壓入土現象,減小對未耕土壤的擾動,形成平整溝底,從而進一步減小耕作功耗。在Matin等[10]研究不同刃口的旋耕刀所形成的溝底結構時,也對于壓實現象進行了討論,發現內刃口和鈍口刀型所形成的溝壁無壓實現象,也有助于進一步降低功耗。
3.4 田間耕作質量對比
為了進一步了解傳統型和仿生型旋耕刀的田間耕作性能,根據GB/T 5668-2008[24]的試驗方法對耕深穩定性、耕寬穩定性、耕后地表植被覆蓋率、耕后地表平整度和土壤蓬松度進行了測量,結果如表2。可以看出,2 種類型旋耕刀在不同耕作條件下的耕深穩定性(大于85%)、耕寬穩定性(大于95%)、耕后地表植被覆蓋率(大于95%)、耕后地表平整度(小于5 cm)和土壤蓬松度(大于14%)在數值上相差不大,且均滿足國標[24]的要求。而且,仿生型旋耕刀的耕作扭矩和功率均小于傳統型旋耕刀,土壤破碎率稍大于傳統型旋耕刀,特別是可以減少溝底壓實現象,溝底平整度,可提高耕作質量。然而,在耕作過程中,仿生型旋耕刀的多齒結構間有一些塞土和塞雜草的現象,當填塞量較多時仿生結構特征對旋耕機的減阻降耗效果不明顯。
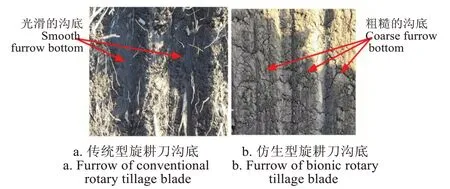
圖7 傳統型和仿生型旋耕刀對溝底的壓實情況Fig.7 Smearing of furrow bottoms caused by conventional and bionic rotary tillage blades
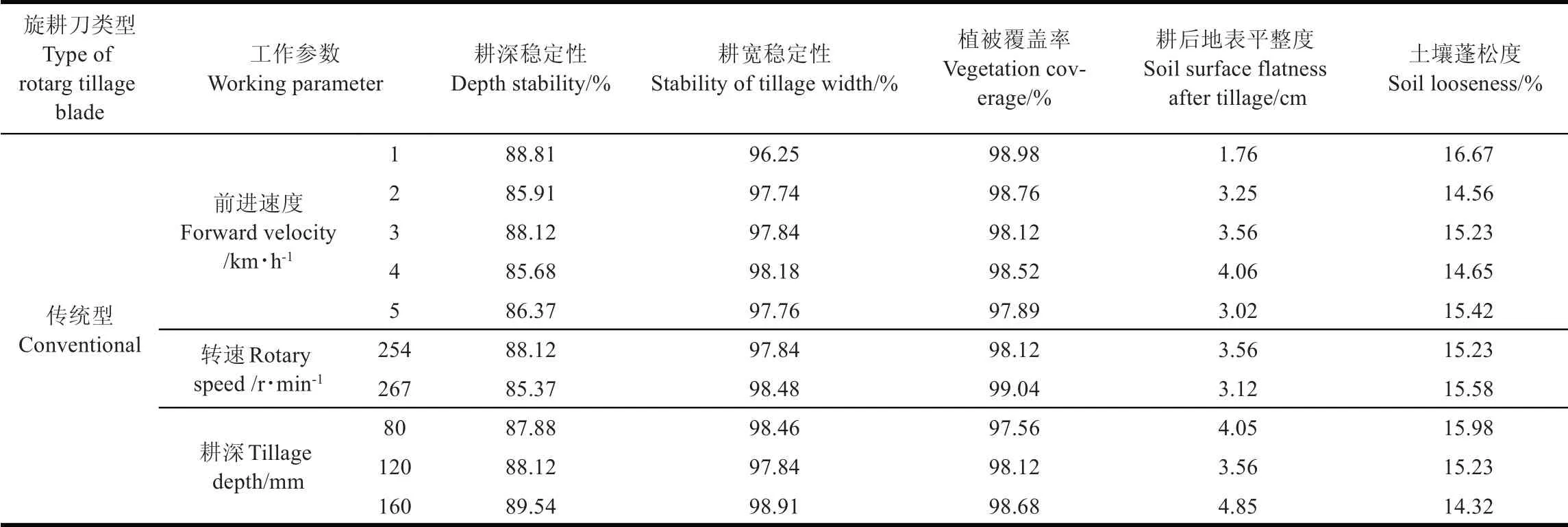
表2 傳統型和仿生型旋耕刀的田間耕作性能Table 2 Field tillage performance of conventional and bionic rotary tillage blades
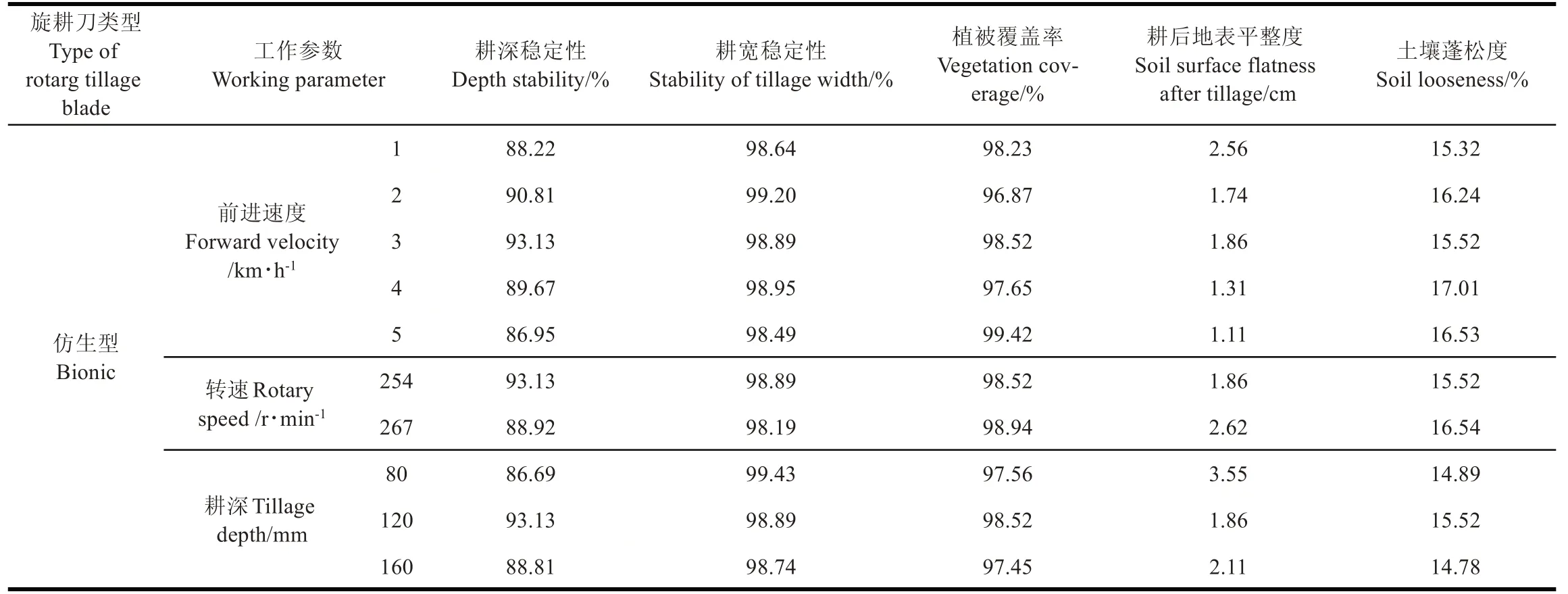
續表2 傳統型和仿生型旋耕刀的田間耕作性能Continued table 2 Field tillage performance of conventional and bionic rotary tillage blades
4 結 論
1)本文分析了鼴鼠前肢手掌多趾組合結構和趾尖輪廓曲線特征,利用二次高斯方程擬合5個趾尖輪廓曲線,擬合度R2均大于0.95,擬合誤差平方和SSE均小于0.05。
2)根據鼴鼠多趾組合結構特征和趾尖輪廓擬合曲線,設計了具有仿生結構特征的旋耕刀,并將得到最優仿生型旋耕刀(相鄰爪趾間間距與趾寬的比值n=1.25 和5趾結構的傾角θ=60°)用于田間試驗。
3)田間試驗結果表明,傳統型和仿生型旋耕刀的整機功率和土壤破碎率變化趨勢相同,其中仿生型旋耕刀的整機功率總是小于傳統型旋耕刀的整機功率,具體地,當前進速度從1 km/h 增加到5 km/h 時,仿生型旋耕刀的整機功耗平均減小16.88%;當轉速從254 r/min 增加到267 r/min 時,仿生型旋耕刀的整機功耗平均減小17.00%;當耕深從80 mm 增加到160 mm 時,仿生型旋耕刀的整機功耗平均減小21.80%。
4)傳統型旋耕刀的正切面刃口較鈍,耕后溝底光滑,有明顯的壓實現象,將阻礙秧苗根系的正常生長。然而,仿生型旋耕刀的正切面具有多趾組合結構特征,耕后溝底有很多劃痕,從而減弱了壓實現象,具有較好的耕作效果。
5)傳統型和仿生型旋耕刀在不同耕作條件下的整機土壤破碎率、耕深穩定性、耕寬穩定性、耕后地表植被覆蓋率、耕后地表平整度和土壤蓬松度在數值上相差不大,且均滿足國標要求。
