基于模糊自適應PID控制的氣動伺服系統位置控制
2019-11-29 02:04:26詹長書詹鴻飛李志鵬林雨
森林工程 2019年6期
詹長書 詹鴻飛 李志鵬 林雨
摘?要:氣壓傳動技術作為一種高效環保的傳動技術,近年來在工業領域得到了廣泛的運用。本文通過研究氣動位置伺服系統的工作機理以及對各組成元件進行特性分析,建立系統的數學模型,使用Matlab中的Simulink模塊建立系統仿真模型。由于氣壓系統具有氣體可壓縮性、高摩擦力和閥口非線性等特性,故通過高增益PID控制對氣動伺服系統進行了位置控制。為了使系統具有更好的自適應性和穩定性,能夠在復雜工況中保持良好性能,采用在PID控制中引入模糊控制的方式對控制參數進行優化,針對各種干擾具有魯棒性,從而得到更好的控制性能。
關鍵詞:氣壓傳動系統;PID控制;模糊控制;模糊自適應PID控制;位置控制
中圖分類號:TH47文獻標識碼:A文章編號:1006-8023(2019)06-0055-06
Position Control of Pneumatic Servo System Based on Fuzzy
Adaptive PID Control
ZHAN Changshu1, ZHAN Hongfei1,LI Zhipeng1, LIN Yu2
(1.School of Traffic and Transportation, Northeast Forestry University, Harbin 150040; 2.University of lllinois at chicago, chicago 60607)
Abstract:As an efficient and environmentally friendly transmission technology, pneumatic transmission technology has been widely used in the industrial field in recent years. In this paper, by studying the working mechanism of pneumatic position servo system and analyzing the characteristics of each component, the mathematical model of the system is established, and the simulation model of the system is established by using Simulink module in matlab. Because the system has strong non-linearity, the position control of pneumatic servo system is carried out by PID control. In order to make the system have better self-adaptability and stability, and maintain good performance in complex working conditions, the method of introducing fuzzy control into PID control is adopted to optimize the control system, so that the control effect of the system is more stable.
Keywords:Pneumatic Transmission System; PID control; fuzzy control; fuzzy adaptive PID control; position control
0?引言
作為流體傳動與控制的重要分支,氣壓傳動技術成本低廉、工作效率高,并且節約能源、無污染,是一種傳動效率較高的傳動技術。氣壓傳動設備的使用和維護較為方便、對環境要求不高(如防磁、防爆和防火等),已在機械化工和交通運輸等領域得到了充分的應用,氣動技術在工業自動化領域中已成為實現自動化的重要手段之一[1-2]。
由于受到氣體的可壓縮性、氣體通過閥口時復雜的流動性等因素的影響,導致氣動伺服系統的位置控制的數學模型比較復雜,具有很強的非線性,而其中一些參數處于未知狀態也使整個建模過程變得困難[3],因此,一些基于精確數學模型的控制方法都無法使用。作為在工業控制應用中常用的控制方法,PID控制(比例—積分—微分控制)由比例單元P、積分單元I和微分單元D3部分組成,控制的基礎是比例P控制;積分I控制可消除穩態誤差,但超調量可能會增加;微分D控制可加快系統的響應速度以及減小超調趨勢[4-5]。而模糊自適應PID控制是在PID控制的基礎上的改進算法,此算法首先制定模糊規則,然后以誤差e誤差變化率de作為輸入進行模糊推理,在此基礎上對PID控制的參數進行調整,從而實現對特定時間的PID參數進行自適應調整[6]。
1?氣動系統特性建模
1.1?系統微分方程
首先作如下假設[7~17]:
(1)工作過程中氣缸內氣體與大氣無熱交換(不考慮摩擦損失)。
(2)氣源壓力保持不變,溫度為大氣溫度。
(3)氣缸中氣體的熱力變化為準靜態過程。
(4)氣缸的內外泄漏均忽略不計。
基于上述假設,根據恒壓氣源向有絕熱的有限容積容器充氣的能量方程,進行分析計算,以下公式中下標1代表工作腔,下標2代表排氣腔,工作腔壓力方程:
dp1dt=kRT1qm1V1-kp1A1V1dxdt。(1)
排氣腔壓力方程:
dp2dt=-kRT2qm2V2+kp2A2V2dxdt。(2)
式中:X為氣缸位移,m;p1,p2為氣缸左右兩腔壓力,Pa;qm1,qm2為氣缸左右兩腔質量流量,kg/s;A1,A2為氣缸活塞面積,m2;k、R為氣體常數,k=1.4,R=283;V1,V2為氣缸兩腔的容積,m3,其中,V1=V10+A1X和V2=V20-A2X,V10和V20為兩腔的初始容積。
氣缸的動力學方程可根據牛頓第二定律求得:
a0p1A1-a0p2A2=mx¨+μx·+kx+f。(3)
式中:a0為工作腔活塞作用面積有效系數(X=0時,a0=0.8~1;X>0時,a0=1);μ為粘性系數,N·s/m;k為彈性系數,N/m;f為外力負載,N。
1.2?比例方向閥節流口流量方程
根據Sanvelli F. E.公式,氣體在通過固定閥口時,實際的質量流量方程:
qm=Aepu1-bRTuω(σ,b)。(4)
ω(σ,b)=1σ=pepuSymbolcB@
b1-(σ-b1-b)2?σ=pepu>b。(5)
式中:Ae為管道系統的總有效面積,m2;b為臨界壓力比;pe為閥口下游壓力,Pa;pu為閥口上游壓力,Pa;Tu為管系的上游溫度,K。
1.3?連續流量性方程
由質量守恒定律可得,流入的氣體質量流量應等于腔體的質量變化率:
Qm1=ddt(ρ1V1)。(6)
應用理想氣體狀態方程:
ρ1=P1RT1。(7)
由公式(6)和(7)可得:
Qm1=1Rddt(P1V1T1)
=1RT1(P1dV1dt+V1dP1dtP1V1T1dT1dt)。(8)
根據假設,整個工作過程中的溫度T1與起始溫度T10應滿足絕熱條件,即:
T1=T10(P1P10)(k-1)/k。(9)
將公式(9)對時間求導,得:
dT1dt=k-1kT1P1dP1dt。(10)
將公式(10)代入公式(8)得:
Qm1=1RT1(P1dV1dt+V1kdP1dt)。(11)
同理可得排氣腔的方程:
Qm2=1RT2(P2dV2dt+V2kdP2dt)。(12)
1.4?閥控缸的傳遞函數
將公式(3)、公式(4)、公式(11)和公式(12)進行拉式變換后進行整理,可以得到整個系統的開環傳遞函數:
G(s)=kvs(s2/ω2n+2τns/ωn+1)。(13)
其中:
ωn=(2kP10A2+k2kfRT0)/V10m;
τn=fV10+k2kRT0M22A2kP10V10M+k2kRT0MfV10;
kv=2AKtRT0/(2A2P10+k2RT0f)。
1.5?系統模型建立
根據上述的公式(1)、公式(2)和公式(4)3個方程,能夠建立氣壓系統的非線性模型。忽略外力作用和彈性負載,可以得到氣壓系統原理圖,如圖1所示。
從圖1中可以看出qm2(Ae,p1)表示流量與閥口壓力的關系,kA1p1(kA2p2)表示活塞運動速度負反饋對于系統壓力所產生的效應。
2?氣動位置PID控制仿真
PID控制具有很強的穩定性和抗干擾能力,并且結構簡單,適用于一些模型復雜的非線性系統。數字PID控制器可以表示為:
u(k)=kpe(k)+ki∑kj=0e(j)+kde(k)-e(k-1)T。(14)
式中:e(k) 為 k 時刻給定值與實際輸出值的差值大小;kp的主要作用是放大控制偏差,使控制器的調節速度加快,但系統的超調量會隨kp的增大而增加;ki的作用是消除穩態誤差,使控制量得到加強;kd的作用主要是通過預判誤差變化和變化率,對系統提前施加一個控制量,從而達到改善系統的動態性和穩定性的效果。
根據上一節建立的系統模型,在Simulink中建立位置反饋控制仿真模型。本系統中,負載質量m=10 kg,氣缸行程l=500 mm,外力f=20 N,氣源壓力Ps=0.6 MPa,活塞直徑r=25 mm。仿真參數分別為kp=50 000,ki=100,kd=10 000,仿真實驗控制框圖如圖2所示,仿真結果如圖3所示。
從仿真結果可以看出本控制系統能夠快速響應,并快速穩定下來,可見這是一個穩定的控制系統。但是在達到穩定的過程中震蕩次數較多,且超調量比較大,并沒有達到預期的理想結果,故引入模糊自適應PID控制參數進行優化。
3?氣動位置模糊自適應PID控制仿真
常規PID控制器對于固定工況的控制系統能達到良好的控制效果,但如果工況發生變化,控制效果就會下降,因此需要對PID控制器的參數進行調整。為了能在變工況的工作條件中實時調整PID參數,使PID控制達到良好的控制效果,通過引入其他智能控制方法,如模糊控制、神經網絡控制和遺傳算法等,從而使系統在變工況的條件下也能具有良好的穩定性和可靠性[18]。
模糊控制的基本思想就是在系統控制中引入人的經驗,將基本的控制策略,采用模糊隱含概念和復合推理規則,轉變為更合適的自動控制策略。為使PID控制中的控制參數kp、ki、kd能夠根據復雜工況進行調整,以誤差e及其變化率de為輸入量,采用模糊控制方式,使PID控制器的控制參數得到實時調節[19]。模糊PID控制器原理如圖4所示。
定義輸入變量e及ec的模糊集為{NB,NM,NS,ZE,PS,PM,PB},對應的論域為{-3,-2,-1,0,1,2,3},定義輸出變量kp、ki及kd的模糊集為{NB,NM,NS,ZE,PS,PM,PB},對應的論域范圍kp為[-0.6,0.6],ki為[-6,6],kd為[-12,12],根據以上參數建立隸屬度模型。以e為例,其隸屬度曲線如圖5所示。
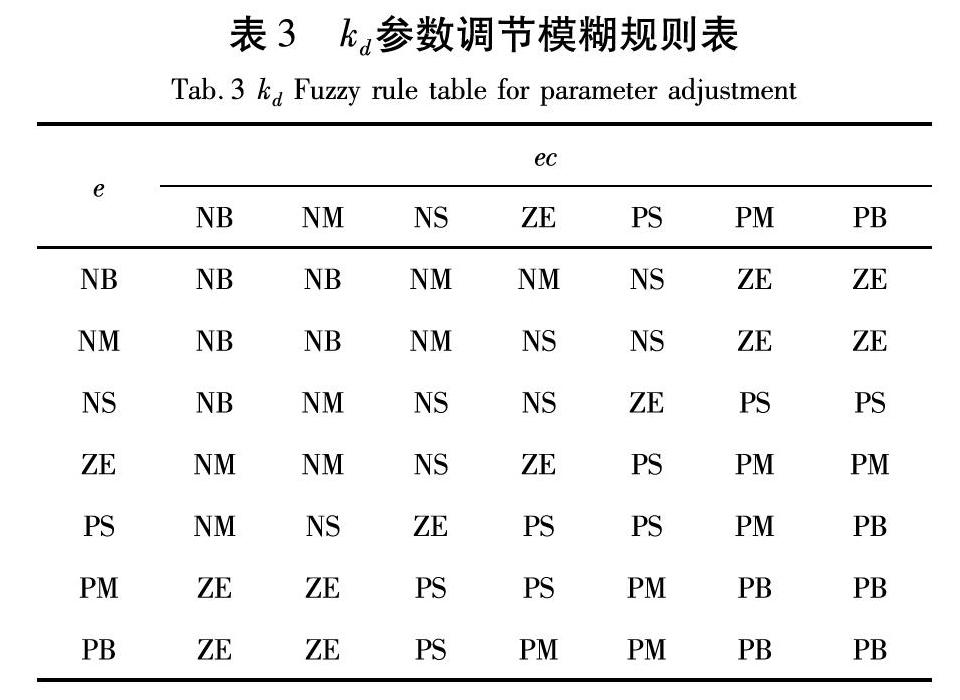
根據 PID 控制中各控制參數的控制原理及效果,建立kp、ki及kd的模糊規則表,見表1~表3。
采用近似推理方法進行模糊推理,基于與模糊規則表的對比,使偏差e及其變化率de的模糊量得到修正,從而得出PID參數修正量的模糊量。通過面積中心法,對模糊量進行去模糊化,從而得出PID參數的修正參數[20]。系統參數kp、ki、kd的模糊PID控制參數調節量為:
kp=kp0+{ei,eci}p
ki=ki0+{ei,eci}i
kd=kd0+{ei,eci}d
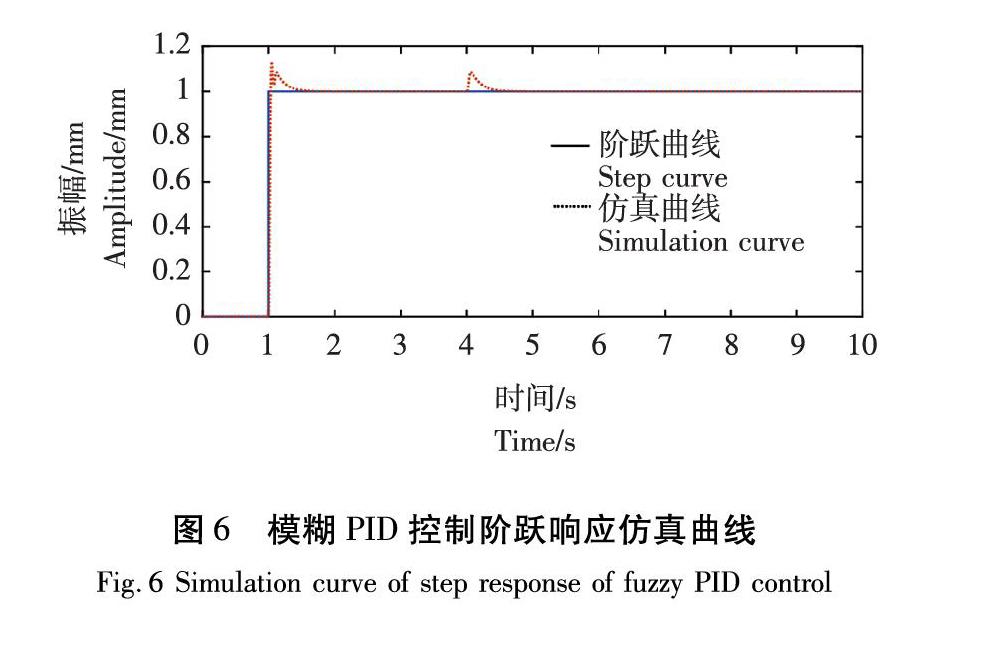
根據上述規則,在Matlab/Simulink中建立仿真模型,并在t=4 s時加入一個幅值為1的擾動量,通過仿真得出基于模糊自適應PID控制的階躍響應曲線圖,如圖6所示。
對比圖3,引入模糊PID自適應控制后,系統在逐漸穩定的過程中,震蕩幅度明顯減小,震蕩次數明顯減少,超調量也有顯著降低,整個系統的仿真結果得到了優化,且系統具有一定抗干擾能力,達到了初步預期目標。
為了驗證系統的自適應控制能力,能夠根據工況的變化實時調整PID參數,從而使系統達到穩定的狀態,對仿真實驗的初始條件進行改變,進行了變工況實驗仿真,并將同一擾動因素的不同擾動量進行對比,得出仿真結果如圖7~圖9所示。
對比同一擾動因素的不同擾動量可以看出,在引入模糊PID控制后,雖然實驗工況產生了不同程度的改變,但是模糊PID控制系統可以根據工況的改變,實時對PID參數進行自適應調整,從而使系統能夠保持穩定狀態。
4?結論
(1)以氣動伺服系統為基礎,通過對傳動系統各部分元件的分析計算,建立了氣動伺服系統各元件的數學模型,并建立了整個氣動系統的傳遞方程。
(2)運用Matlab/Simulink,建立了氣動系統的計算機仿真模型。
(3)采用基本的PID控制進行仿真實驗,仿真結果顯示仿真模型在固定工況中可達到較好效果,但是在變化工況中系統不能很好達到預期。
(4)改進了PID控制,通過模糊控制使PID控制參數得到實時修正,通過模糊PID控制后,系統的振幅明顯減小,震蕩次數減少,超調量降低。
(5)對實驗工況進行改變,進行仿真實驗并進行比對,仿真結果說明整個仿真系統在應對復雜工況時能夠進行實時調整從而達到良好效果。
【參?考?文?獻】
[1]謝琦,林忠麟,張天宏.基于四開關閥錯時調制的氣動位置控制系統研究[J].液壓氣動與密封,2019,39(5):19-25.
XIE Q, LIN Z L, ZHANG T H. Research on pneumatic position control system based on four-switch valve timing modulation[J]. Hydraulic Pneumatic and Seal, 2019, 39 (5): 19-25.
[2]王濤,王波,王紹寧,等.氣動伺服焊槍的研究進展及展望[J].液壓與氣動,2017,37(10):1-9.
WANG T, WANG B, WANG S N, et al. Research progress and prospect of pneumatic servo welding torch[J]. Hydraulic and Pneumatic, 2017, 37(10): 1-9.
[3]林黃耀.氣動伺服系統非線性模型的建立與仿真[J].河南科技,2013,38(19):128-129.
LIN H Y. Establishment and simulation of nonlinear model of pneumatic servo system[J]. Henan Science and Technology, 2013, 38 (19): 128-129.
[4]田艷兵,成中偉,韓森.高精密氣動波紋管驅動伺服系統建模與仿真[J].液壓與氣動,2015,35(9):126-129.
TIAN Y B, CHENG Z W, HAN S. Modeling and simulation of high precision pneumatic bellows drive servo system[J]. Hydraulic and Pneumatic, 2015, 38 (9): 126-129.
[5]林黃耀.改進PID算法在氣動位置伺服控制系統中的應用[J].長春師范大學學報,2015,34(6):34-36.
LIN H Y. Application of improved PID algorithm in pneumatic position servo control system[J]. Journal of Changchun Normal University, 2015, 34(6): 34-36.
[6]元良,勾萬強,張敏.基于模糊PID復合控制的醫用控溫毯控制系統設計[J].機械工程與自動化,2018,47(6):167-169.
YUAN L, GOU W Q, ZHANG M. Design of medical temperature control blanket control system based on fuzzy-PID compound control[J]. Mechanical Engineering and Automation, 2018, 47(6): 167-169.
[7]陳聰,孫志毅,柏艷紅.基于AMESim的氣動閥控缸系統特性的研究[J].機床與液壓,2014,42(19):34-37.
CHEN C, SUN Z Y, BAI Y H. Study on the characteristics of the pneumatic valve-controlled cylinder system based on AMESim[J]. Machine Tool and Hydraulic, 2014, 42 (19): 34-37.
[8]王飛,段振霞,劉建國,等.氣動位置伺服控制系統設計與研究[J].現代制造工程,2017,40(7):90-94
WANG F, DUAN Z X, LIU J G, et al. Design and research of pneumatic position servo control system[J]. Modern Manufacturing Engineering, 2017, 40(7): 90-94.
[9]王波.電阻點焊氣動伺服系統力/位置復合控制關鍵技術研究[D].北京:北京理工大學,2015.
WANG B. Research on key technology of force/position compound control for resistance spot welding pneumatic servo system[D]. Beijing:Beijing University of Technology, 2015.
[10]王然然,李艾民,鄭佳,等.氣動伺服系統缸內熱力過程研究[J].液壓與氣動,2014,34(03):13-16.
WANG R R, LI A M, ZHENG J, et al. Research on in-cylinder thermal process of pneumatic servo system[J]. Hydraulic and Pneumatic, 2014, 34(3): 13-16.
[11]謝守勇,趙鐳,段廷億,等.蔬菜移栽機取苗機構運動控制系統研究[J].農業工程技術,2019,39(1):64-68.
XIE S Y, ZHAO L, DUAN Y Y, et al. Research on motion control system of seedling-taking mechanism of vegetable transplanter[J]. Agricultural Engineering Technology, 2019, 39(1): 64-68.
[12]高銳,張小珍,許浩,等.采伐機負載敏感液壓回路仿真研究[J].林業機械與木工設備,2018,46(5):45-48.
GAO R, ZHANG X Z, XU H, et al. Simulation study on load sensitive hydraulic loop of tree harvesters[J]. Forestry Machinery & Woodworking Equipment, 2018, 46(5):45-48.
[13]郝慧敏,沈興全,陳煥軍.新型壓頭壓力數字化控制的實現[J].煤礦機械,2015,36(1):189-191.
HAO H M, SHEN X Q, CHEN H J. Realization of a new type of pressure digital control[J]. Coal Mine Machinery, 2015, 36(1): 189-191.
[14]成中偉.高精密氣動波紋管驅動伺服系統建模與仿真[D].青島:青島理工大學,2015.
CHENG Z W. Modeling and simulation of high precision pneumatic bellows drive servo system[D]. Qingdao:Qingdao University of Technology, 2015.
[15]張若青,馬媛媛.基于LabVIEW和PAC平臺的氣動比例位置控制系統分析[J].儀表技術與傳感器,2014,51(10):69-71.
ZHANG R Q, MA Y Y. Analysis of pneumatic proportional position control system based on LabVIEW and PAC platform[J]. Instrument Technology and Sensors, 2014, 51(10): 69-71.
[16]夏昌,祝志文.基于CFD的運動橋梁斷面氣動力非線性特性研究[J].公路工程,2018,43(2):210-214.
XIA C, ZHU Z W. Study on aerodynamic nonlinearity of moving bridge section based on CFD[J]. Highway Engineering, 2018, 43(2):210-214.
[17]柏宗春,李小寧.伺服擺動氣缸內置式磁流變阻尼器優化設計[J].南京理工大學學報,2012,36(3):534-539.
BAI Z C, LI X N. Optimum design of built-in magnetorheological damper for servo swing cylinder[J]. Journal of Nanjing University of Technology, 2012, 36 (3): 534-539.
[18]錢炳蕓,朱革蘭.基于磁流變的氣動位置速度復合控制策略[J].控制工程,2015,22(3):555-558.
QIAN B Y, ZHU G L. Composite control strategy of aerodynamic position and velocity based on magnetorheological (MR)[J]. Control Engineering, 2015, 22 (3): 555-558.
[19]鄧劍,潘尚峰.基于模糊PID自適應控制的動力卡盤動態扭矩加載研究[J].機床與液壓,2019,47(3):64-67.
DENG J, PAN S F. Dynamic torque loading of power chuck based on fuzzy-PID adaptive control[J]. Machine Tool and Hydraulic, 2019, 47(3): 64-67.
[20]覃秋松,麥云飛.模糊工程PID在氣動位置伺服中的應用[J].電子科技,2015,28(11):104-109.
QIN Q S, MAI Y F. Application of fuzzy engineering PID in pneumatic position servo[J]. Electronic Science and Technology, 2015, 28 (11): 104-109.