基于深度學(xué)習(xí)的無人機(jī)巡檢圖像銷釘故障檢測
2019-12-02 07:13:52
計(jì)算機(jī)測量與控制 2019年11期
(深圳供電局有限公司,廣東 深圳 518000)
0 引言
針對我國能源資源分布與需求不平衡的問題,我國電力系統(tǒng)發(fā)展戰(zhàn)略實(shí)施了“西電東送”、“南北互供”、“全國聯(lián)網(wǎng)”三大工程。全國互聯(lián)大電網(wǎng)具有長距離、跨區(qū)域的特點(diǎn),需要用龐大的輸電線路網(wǎng)絡(luò)進(jìn)行電能的輸送。因此,輸電線路是電力系統(tǒng)的重要組成部分,它擔(dān)負(fù)著輸送和分配電能的任務(wù)。
我國目前已形成華北、東北、華東、華中、西北和南方電網(wǎng)共6個(gè)跨省電網(wǎng),110 kV以上輸電線路[1]已達(dá)到近51.4萬km。同時(shí),輸電線路網(wǎng)絡(luò)由于常年暴露在自然環(huán)境中,很容易受到天氣、鳥類等因素的影響。最常見的天氣因素包括雷擊、暴雨和高溫。這種劇烈的環(huán)境條件,很大程度上會(huì)導(dǎo)致線路部件產(chǎn)生一定程度的形變,甚至破損。因此,定時(shí)對電力輸電線路進(jìn)行巡檢,及時(shí)檢測輸電線路中部件出現(xiàn)的故障,從而保證電力系統(tǒng)高效穩(wěn)定運(yùn)行。當(dāng)前主要的輸電線路巡檢模式主要有人工巡檢、直升機(jī)巡檢[2]和無人機(jī)巡檢[3-5],以及3種巡檢模式相互組合協(xié)同進(jìn)行。考慮到無人機(jī)巡檢具有野外作業(yè)風(fēng)險(xiǎn)低、效率高的特點(diǎn)[6],而且無人機(jī)攜帶方便、操作簡單、反應(yīng)迅速、起飛降落對環(huán)境的要求低等,無人機(jī)巡檢逐漸成為主流的巡檢方式并慢慢代替?zhèn)鹘y(tǒng)巡檢。但是,無人機(jī)巡檢會(huì)產(chǎn)生大量用于分析是否出現(xiàn)故障的圖片,因此,一種可以代替人工判讀的智能識(shí)別與檢測算法用于檢測輸電線路部件故障具有非常重要的意義。
目前,針對輸電線路中比較容易看見的部件故障檢測算法已經(jīng)取得了不錯(cuò)的效果。經(jīng)典的輸電線路部件故障檢測算法主要是從目標(biāo)的輪廓入手結(jié)合紋理特征進(jìn)行檢測識(shí)別。例如根據(jù)由直線和曲線片段組成的2AS相互關(guān)系判決均壓環(huán)是否發(fā)生傾斜[7]。對于輸電線,可以通過Freeman[8]鏈碼準(zhǔn)則判斷是否發(fā)生斷股故障[9],也可以利用Hough變換算法檢測輸電線,并判斷是否有異物懸掛在輸電線上[10]。近年來,隨著深度學(xué)習(xí)在圖像識(shí)別與檢測領(lǐng)域引起了人們的廣泛關(guān)注。利用深度學(xué)習(xí)算法,針對無人機(jī)巡檢圖像中絕緣子[11-13]、防振錘[14-15]、均壓環(huán)[16]和輸電線[17]等部件故障檢測的效果得到了顯著地提升。然而針對輸電線路中的細(xì)小部件故障,如銷釘脫落,依舊是輸電線路故障檢測中的困難點(diǎn)。
架空輸電線路中大量的設(shè)備部件是通過螺母-銷釘進(jìn)行連接或者固定。由于輸電線路長期暴露在自然環(huán)境中,而銷釘是一種金屬器具,容易受到雨水侵蝕生銹,從而發(fā)生形變脫落。或是受鳥害影響,將其從螺母中抽離。一旦這一安全隱患未能及時(shí)處理,以至于固定點(diǎn)螺母發(fā)生松動(dòng),從而引起輸電線路關(guān)鍵部件解體,以及桿塔的不牢固。本文采用了在圖像檢測領(lǐng)域效果優(yōu)異的Faster R-CNN[18]算法并分析了不同的初始化網(wǎng)絡(luò),如VGG16[19],ResNet-50[20],ResNet-101[20]和ResNet-152[20]對銷釘脫落這一故障進(jìn)行定位識(shí)別的效果。除此之外,本文進(jìn)一步對比Hough梯度圓檢測+直線段檢測(Line Segment Detector, LSD)[21]、聚合通道特征(Aggregate Channel Features, ACF)[22]+Adaboost[23]和Faster R-CNN三種算法在無人機(jī)巡檢圖像中銷釘脫落故障檢測性能。
1 銷釘脫落檢測研究
螺母-銷釘是一種人造部件,具有嚴(yán)格的幾何造型。圖1是無人機(jī)巡檢獲得的螺母-銷釘實(shí)例圖,其中圖1(a)為兩張正常的螺母-銷釘樣圖,圖1(b)為銷釘脫落的故障樣圖。
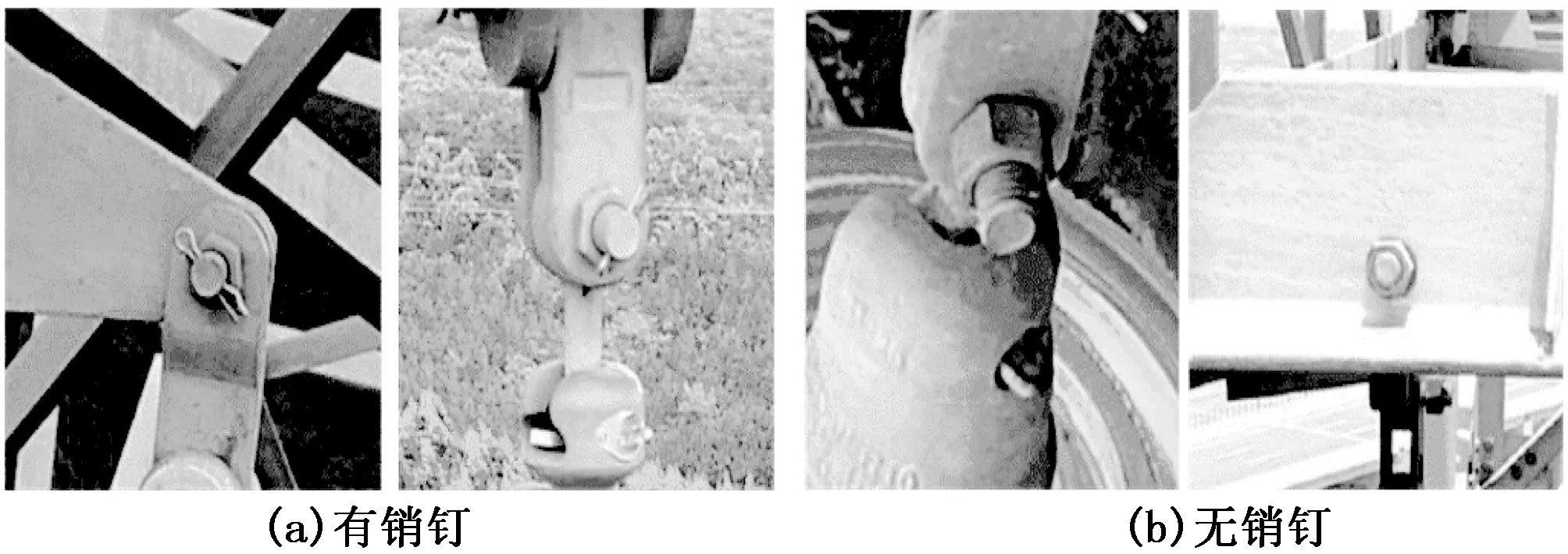
圖1 螺母-銷釘實(shí)例圖
1.1 Faster R-CNN
近年來,基于深度學(xué)習(xí)技術(shù)的目標(biāo)檢測算法逐漸成為研究熱點(diǎn)。經(jīng)典的R-CNN[24]目標(biāo)檢測算法在2014年由Girshick等人提出,由于其檢測精度與效率存在較大的提升空間,在這之后,先后提出了Fast R-CNN[25]和Faster R-CNN算法。其中Faster R-CNN算法已經(jīng)成功應(yīng)用于多個(gè)領(lǐng)域。
Faster R-CNN對無人機(jī)巡檢圖像中銷釘脫落檢測流程如圖2所示。我們可以分為4個(gè)階段,首先將圖片輸入到CNN模型中訓(xùn)練,隨后用區(qū)域候選網(wǎng)絡(luò)(Region Proposal Network, RPN)對提取后的特征圖進(jìn)行處理,尋找可能包含目標(biāo)的區(qū)域,再用感興趣區(qū)域池化(Region of interest Pooling, RoIP)處理,提取出與目標(biāo)物相關(guān)的特征向量,最后再由卷積層和全連接層得到目標(biāo)物邊界框的坐標(biāo)和分類結(jié)果。
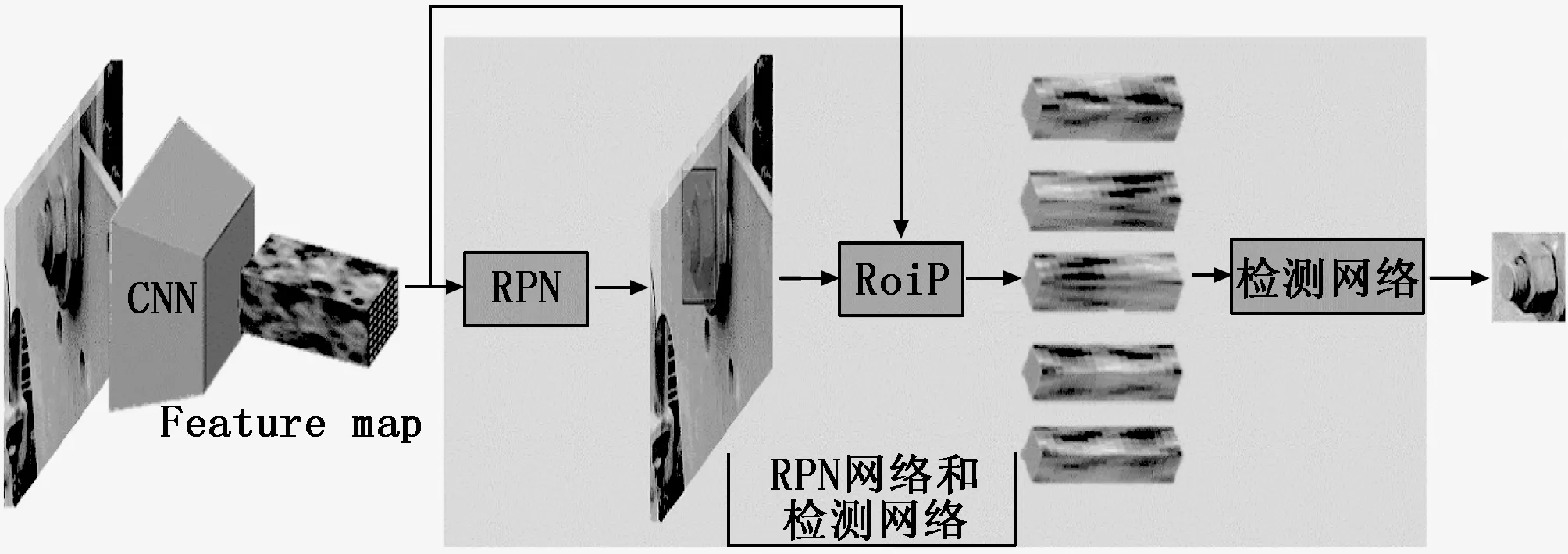
圖2 Faster R-CNN銷釘故障檢測過程
在第一階段,從圖2中可以看出,我們將任意尺寸的無人機(jī)巡檢圖像輸入至卷積神經(jīng)網(wǎng)絡(luò)中,通過訓(xùn)練得到可被后續(xù)RPN網(wǎng)絡(luò)和檢測網(wǎng)絡(luò)共享的特征圖。不同的卷積神經(jīng)網(wǎng)絡(luò)模型結(jié)構(gòu)并不相同,檢測效果也不盡相同。本文分別采用VGG16,ResNet-50,ResNet-101和ResNet-152作為Faster R-CNN目標(biāo)檢測中的預(yù)訓(xùn)練CNN模塊,用以提取輸入圖片的特征圖(Feature map)。VGG16模型的網(wǎng)絡(luò)結(jié)構(gòu)包括有13個(gè)卷積層,13個(gè)激活層和4個(gè)池化層。而ResNet網(wǎng)絡(luò)模型則由1個(gè)卷積層,1個(gè)池化層,和若干個(gè)殘差模塊組成。其中ResNet-50、ResNet-101、ResNet-152分別包含16、33、50個(gè)殘差模塊。

圖3 RPN網(wǎng)絡(luò)示意圖
一般,螺母-銷釘組件在無人機(jī)巡檢獲取的圖片中只占很小的一個(gè)區(qū)域。如果對所有的區(qū)域都遍歷一遍,并得到檢測結(jié)果,勢必會(huì)導(dǎo)致檢測效率的下降以及增大了網(wǎng)絡(luò)模型訓(xùn)練難度。為解決這一問題,F(xiàn)aster R-CNN拋棄了傳統(tǒng)的滑動(dòng)窗口的方法并提出通過RPN和檢測網(wǎng)絡(luò)共享特征圖的方式來減少復(fù)雜計(jì)算所導(dǎo)致的時(shí)間消耗,其中RPN網(wǎng)絡(luò)示意圖如圖3所示。先用512個(gè)3×3卷積核進(jìn)一步集中特征信息,并分別輸入邊框分類器和邊框回歸器中。假設(shè)特征圖中的某個(gè)目標(biāo)區(qū)域生成了k個(gè)不同范圍的候選框,那么邊框分類器則輸出每個(gè)目標(biāo)候選框?qū)儆谀囊环N螺母-銷釘狀態(tài)或者是背景的概率。于是,總共有2k個(gè)輸出。假設(shè)輸電線路部件矩形框的位置由 (x,y,w,h) 來表示。其中矩形框的中心點(diǎn)坐標(biāo)為(x,y),w,h分別表示矩形框的寬和高。因此,邊框回歸網(wǎng)絡(luò)有4k個(gè)輸出。隨后將得到的候選區(qū)域信息和特征圖共同送入RoIP層中從而獲得建議特征圖并傳遞至檢測網(wǎng)絡(luò)中。檢測網(wǎng)絡(luò)包括有兩個(gè)分支,分別為邊框分類網(wǎng)絡(luò)和邊框回歸網(wǎng)絡(luò)。其中邊框分類網(wǎng)絡(luò)通過全連接層和Softmax分類器對螺母-銷釘或背景做進(jìn)一步判斷,邊框回歸網(wǎng)絡(luò)則通過全連接層從而獲取更高進(jìn)度的邊框區(qū)域。
1.2 ACF+Adaboost
ACF是一種多特征融合算法。本文從6個(gè)不同方向的梯度直方圖,3個(gè)LUV顏色通道和1個(gè)梯度幅值通道,共10個(gè)特征通道并使用快速特征金字塔[26]計(jì)算無人機(jī)巡檢圖像在不同尺度變化下的特征通道值。使用滑動(dòng)窗口對特征通道進(jìn)行遍歷,計(jì)算其積分圖的特征值之和并作為特征向量送入Adaboost分類器,通過非極大值抑制[27](Non-Maximum Suppression, NMS)得到螺母-銷釘?shù)臋z測框,判斷銷釘是否脫落。
1.3 Hough+LSD
對螺母-銷釘?shù)臋z測中,將螺母和銷釘作為一個(gè)整體進(jìn)行判定。考慮到螺母是一種類圓形部件,銷釘?shù)闹本€特征比較明顯,在檢測過程如圖4所示,使用Hough梯度進(jìn)行圓檢測,而直線段檢測有LSD算法完成。隨后根據(jù)兩者之間的位置關(guān)系判斷銷釘是否與螺母分離脫落。
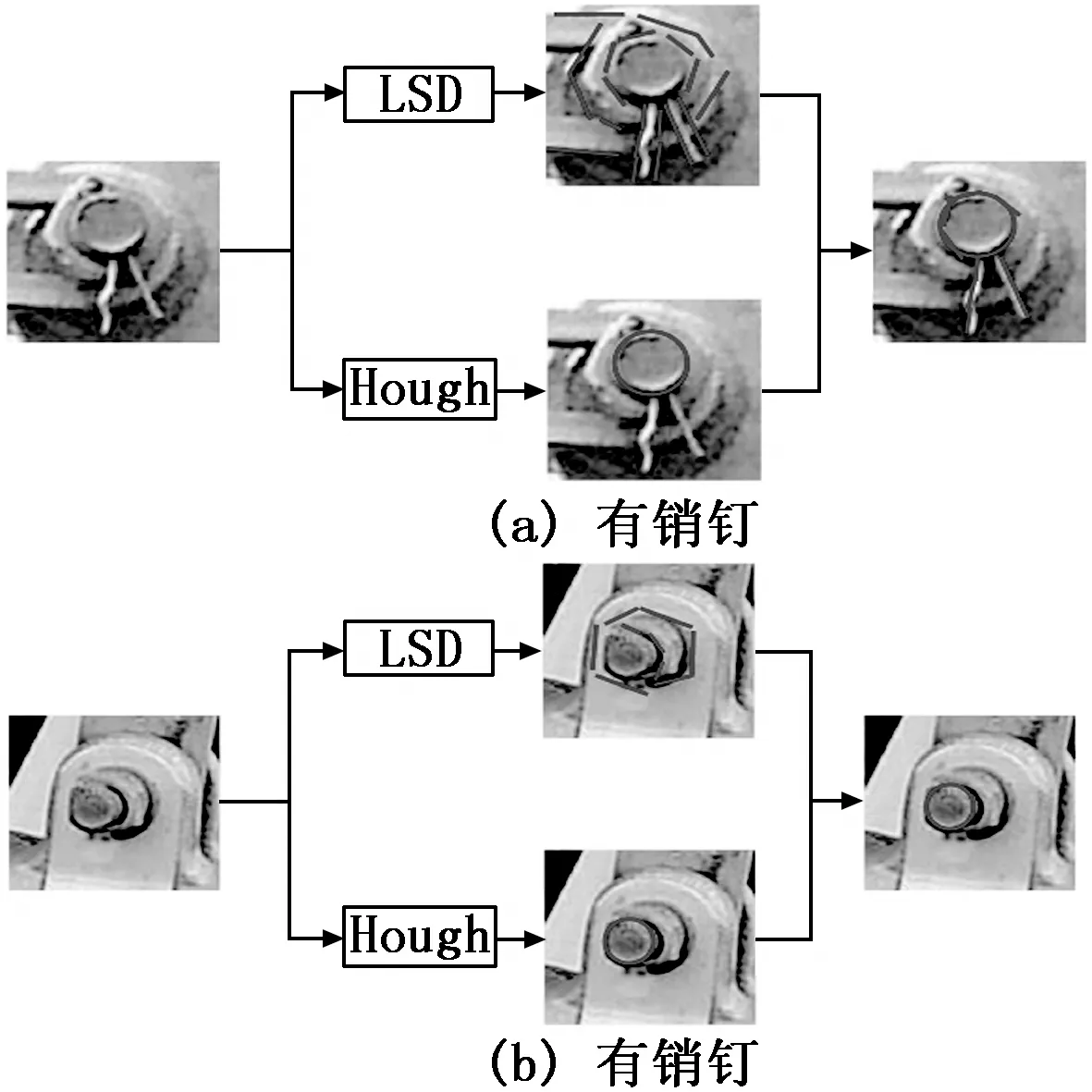
圖4 螺母尺寸背景下的銷釘檢測
2 數(shù)據(jù)集與模型訓(xùn)練
2.1 數(shù)據(jù)集準(zhǔn)備
本文使用的數(shù)據(jù)集是由無人機(jī)巡檢時(shí)獲得的圖像。本文針對輸電線路銷釘脫落故障檢測這一任務(wù),將數(shù)據(jù)集分為了3個(gè)部分,其中訓(xùn)練樣本3600張,驗(yàn)證樣本1 200張,測試樣本1 200張,測試集中的1 200張樣本都不存在于訓(xùn)練樣本和驗(yàn)證樣本中。其中,故障銷釘和無故障銷釘兩個(gè)類別各占3個(gè)樣本集的50%。
2.2 模型訓(xùn)練
本實(shí)驗(yàn)的計(jì)算機(jī)配置為Intel(R) Core(TM) i7-7820X 3.6 GHz CPU,TITAN Xp GPU,64 G 內(nèi)存,采用Tensorflow深度學(xué)習(xí)框架,使用Faster R-CNN實(shí)現(xiàn)網(wǎng)絡(luò)模型的訓(xùn)練,先后選取VGG16,ResNet-50,ResNet-101和ResNet-152預(yù)訓(xùn)練模型對前置ImageNet網(wǎng)絡(luò)進(jìn)行初始化。根據(jù)多次實(shí)驗(yàn)經(jīng)驗(yàn)所得,本文在訓(xùn)練階段設(shè)置學(xué)習(xí)率為0.001,反向梯度的動(dòng)量為0.9,學(xué)習(xí)率衰減權(quán)重為0.1,批尺寸大小為256,NMS閾值為0.7,其前后候選框個(gè)數(shù)分別為12 000和2 000,交集并集比(Intersection over Union, IoU)大于0.7時(shí)為正樣本,IoU小于0.3時(shí)為負(fù)樣本。模型檢測效果以平均準(zhǔn)確率作為主要評(píng)判標(biāo)準(zhǔn),檢測用時(shí)為次要標(biāo)準(zhǔn)。
3 實(shí)驗(yàn)與結(jié)果分析
3.1 銷釘故障檢測過程
使用Faster R-CNN算法對銷釘故障檢測效果的測試過程,首先根據(jù)2.1節(jié)中的數(shù)據(jù)集劃分方式,將測試集中1 200張圖片(600張有銷釘圖片、600張無銷釘圖片)同時(shí)輸入至2.2節(jié)中訓(xùn)練得到的檢測模型。檢測模型的卷積層分別對輸入的每一個(gè)測試圖片進(jìn)行特征提取,提取出的特征圖中包含有前景(螺母-銷釘或單螺母)和背景的特征。隨后檢測網(wǎng)絡(luò)中的區(qū)域候選層將特征圖劃分成若干個(gè)區(qū)域,并對每個(gè)區(qū)域生成不同尺寸的候選框,接著用一組全連接層對候選區(qū)域進(jìn)行分類,判斷是前景還是背景,再用另一組全連接層對不同尺寸的候選框進(jìn)行回歸選出能夠較好的將前景包含在內(nèi)的候選框。最后將篩選的結(jié)果與之前提取的特征圖一同輸入由全連接層(分類器與回歸器)組成的檢測網(wǎng)絡(luò)中,其中回歸器用于進(jìn)一步鎖定目標(biāo)的邊框位置,分類器用于判別是螺母-銷釘和單螺母中的哪一類,從而完成銷釘是否脫落的故障檢測過程。
為保證實(shí)驗(yàn)結(jié)果的客觀性,進(jìn)行了多次重復(fù)實(shí)驗(yàn)。每次實(shí)驗(yàn)都對數(shù)據(jù)集隨機(jī)劃分為訓(xùn)練集、驗(yàn)證集和測試集。通過對實(shí)驗(yàn)結(jié)果進(jìn)行平均得到以下結(jié)果。
3.2 不同模型檢測效果對比
通過對2.2節(jié)中訓(xùn)練得到4種檢測模型進(jìn)行測試,并計(jì)算查準(zhǔn)率(Precision, P)、查全率(Recall, R)和平均精度(Average Precision, AP)。
(1)
以故障銷釘為例,查準(zhǔn)率表示檢測出的故障中,正確檢測的比例;查全率表示所有故障中被檢測出的比例;其中TP為挑選出的故障銷釘中判斷正確的數(shù)量,F(xiàn)P為判斷錯(cuò)誤的數(shù)量,F(xiàn)N為未被檢測出的故障銷釘?shù)臄?shù)量。根據(jù)實(shí)驗(yàn)結(jié)果繪制對應(yīng)的Precision-Recall曲線,如圖5所示。

圖5 4種Faster R-CNN檢測模型Precision-Recall曲線
根據(jù)Precision-Recall曲線,可計(jì)算每一分類的平均精度。平均精度是衡量模型在某一分類上檢測性能,是對Precision-Recall曲線上11個(gè)點(diǎn)(當(dāng)Recall≥0,0.1,…,1時(shí)Precision的最大值)的平均。在此基礎(chǔ)上計(jì)算所有類別平均精度的均值,即均值平均精度(mean Average Precision, mAP)用以判斷模型的整體性能。并將以上實(shí)驗(yàn)結(jié)果和檢測時(shí)間匯總為表1所示。對于正常銷釘?shù)钠骄葋碚f,ResNet-50模型的效果最好,其次是ResNet-152,再者是ResNet-101,最后是VGG16;對于故障銷釘?shù)钠骄葋碚f,ResNet-50、ResNet-152和VGG16不相上下且不如ResNet-101模型的效果好;對于均值平均精度,ResNet-101模型的效果依舊優(yōu)于其他3個(gè)模型;在檢測時(shí)間的消耗上,隨著模型復(fù)雜度的增加,VGG16、ResNet-50、ResNet-101和ResNet-152模型的用時(shí)也隨之遞增,其中ResNet-152模型的耗時(shí)近乎是VGG16模型的兩倍。圖6為ResNet-101模型的檢測效果。

表1 4種Faster R-CNN模型檢測結(jié)果

圖6 銷釘故障檢測效果
通過對比不同模型的檢測效果可以看出對于好的銷釘?shù)臋z測效果遠(yuǎn)超于對壞的銷釘?shù)臋z測效果。主要原因?yàn)檩旊娋€路網(wǎng)絡(luò)中,除了螺母-銷釘?shù)募庸滩考猓€存在有單獨(dú)的螺母零件,它與銷釘脫落后的螺母相比,僅是否有銷釘孔這一區(qū)別。由于拍攝角度、光線等因素的影響,存在一定的可能性將銷釘脫落后的螺母與單獨(dú)的螺母混淆,而螺母-銷釘結(jié)構(gòu)相對獨(dú)特,以至于兩者檢測效果相差較大。總體效果而言,ResNet-101模型的表現(xiàn)明顯優(yōu)于其他模型,特別是在檢測壞的銷釘方面。越為復(fù)雜的深度模型,越依賴數(shù)據(jù)的豐富性。與整個(gè)龐大的輸電線路系統(tǒng)相比,部件故障出現(xiàn)的情況十分稀少,對于銷釘這類微小部件更是少見,數(shù)據(jù)量不足這是導(dǎo)致ResNet-152模型的效果不如ResNet-101模型的原因。
3.3 不同算法檢測效果對比
根據(jù)3.1節(jié)的實(shí)驗(yàn)結(jié)果,選取最優(yōu)模型ResNet-101模型與其他目標(biāo)檢測算法進(jìn)行對比,實(shí)驗(yàn)結(jié)果如表2所示。根據(jù)表2的實(shí)驗(yàn)數(shù)據(jù),不可否認(rèn)傳統(tǒng)目標(biāo)檢測算法在檢測時(shí)間方面比深度學(xué)習(xí)方法要快。不過檢測精度還是無法與Faster R-CNN算法比擬。以ACF+Adaboost算法為例,雖然銷釘脫落故障的檢測時(shí)間僅為Faster R-CNN算法的1/4,但其誤檢率較高,導(dǎo)致整體精度下降。而Hough+LSD算法的缺陷比較明顯,由于銷釘在無人機(jī)巡檢圖像中僅占一小部分,像素總數(shù)相對較少,同時(shí)圖像中其他直線段特征存在干擾,以至于檢測效果遠(yuǎn)低于Faster R-CNN算法。
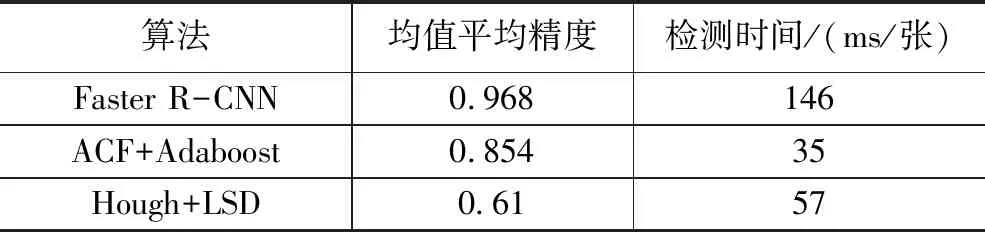
表2 3種目標(biāo)檢測算法檢測結(jié)果
4 結(jié)束語
實(shí)現(xiàn)無人機(jī)巡檢圖像中輸電線路銷釘脫落故障的自動(dòng)檢測,是保證輸電系統(tǒng)安全穩(wěn)定的重要前提。深度學(xué)習(xí)在無人機(jī)巡檢圖像檢測任務(wù)中具有非常好的應(yīng)用前景,本文在此基礎(chǔ)上,研究不同F(xiàn)aster R-CNN網(wǎng)絡(luò)模型對無人機(jī)巡檢圖像中銷釘脫落故障檢測效果的影響,同時(shí)本方法的準(zhǔn)確率都優(yōu)于經(jīng)典圖像檢測算法。在實(shí)際應(yīng)用中可以節(jié)省大量人力和時(shí)間成本,極大地提升巡檢效率,及時(shí)處理輸電線路系統(tǒng)中存在的安全隱患。
未來的工作中,將搜集更多的圖片樣本,擴(kuò)大樣本庫建設(shè),優(yōu)化深度學(xué)習(xí)算法,提高識(shí)別準(zhǔn)確率以及增加識(shí)別的關(guān)鍵部件種類,推動(dòng)無人機(jī)全自動(dòng)化巡檢的研究進(jìn)程。
猜你喜歡
中老年保健(2021年12期)2021-11-30 02:58:01
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
中華詩詞(2018年11期)2018-03-26 06:41:34
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
Coco薇(2016年8期)2016-10-09 02:11:50
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50