基于物聯網的輸電線路巡檢機器人控制策略研究
2019-12-02 07:13:58
計算機測量與控制 2019年11期
(北京信息科技大學 自動化學院,北京 100192)
0 引言
隨著電力輸電網絡高速發展,對全自動化巡檢技術、智能化運維以及新裝備的應用提出了更高更迫切的需求。未來十年實現電網設備全過程管控要求改變傳統的運檢管理模式,打造物物互聯,智能化設備狀態的自動預警和動作規劃泛在型電力物聯網[1]。基于這種需求,泛在物聯網的應用逐步深入到電力系統的每個環節,為了解決遠距離高可靠性的通信問題,最新的窄帶物聯網(Narrow Band Internet of Things)技術發揮關鍵性作用,相對于zigbee自組網技術,NBIOT不僅擁有廣聯接、低功耗和可靠性更高的特性,并且點對點的傳輸距離大幅度提升。這對于輸電線路這一領域的應用是至關重要,我國幅員遼闊輸電線路的運行空間大,而巡檢和監測裝置有效作業范圍相對較小一直以來都是一個技術瓶頸。長距離輸電領域中電力線路巡檢機器人是機器人技術研究和應用的一個重要課題,不僅要解決當機器人遇到障礙物時,機器人能在障礙物的前后系掛導軌弧形臂以便越過障礙,或是專門設計在塔頭架設在線夾之間的越障橋,幫助機器人實現長距離連續巡檢[2]。本研究基于越障橋的本體機器人設計,進一步研究開發成組的協同作業機器人相關技術,將多個機器人聯動控制置于新型物聯網框架中這一類的工程研發目前在電力物聯網領域已經十分緊迫。近年來,國內科研機構也進行了大量的工作。成果比較突出的是沈陽自動化研究所、南方電網公司進行了不少電力領域的特種巡檢機器人的開發[3]。但是上述機器人樣機的耗電量大、陡坡和上下轉彎存在困難、在線作業時間短,較難適應戶外廣域環境作業,尤其多機通訊協同巡檢能力欠缺,難以做到大規模實用化。
針對耗電量問題,一方面有必要突破現有的機器人靠自身和融入新一代窄帶物聯網和5G通訊技術實現多機協同智能巡檢,另一方面需要設計優化機器人本體,減輕重量、提高電池能量密度、優化電路的功耗、更新節能算法以及設計更加高效便捷的充電裝置等。為此,本文是立足高速泛在融合技術,在基礎機器人基礎上結合了先進的窄帶物聯網架構,即NB-IoT。本文設計的巡檢機器人是安裝在架空輸電線路上的自動巡線設備,在同一檔內或相鄰檔內,可能安裝多個機器人終端。這樣可以通過協同控制多個機器人,實現廣域作業范圍的復雜協作巡檢操作[4]。因此,提出采用多傳感器數據的融合技術,構造基于物聯網通訊模式的多機器人協作體系。實現多機器人同步控制在現代輸電通道的巡檢。有利于進一步推進生產設備管理對象、感知設備的規范管理,實現各類感知數據的共享匯聚和整合應用。本文采用的NB-IoT技術是IoT領域一個新興的技術,起最大的特色是支持低功耗設備在廣域網的蜂窩數據連接[5]。本研究即采用小型低功耗的姿態傳感器和自主研發的無線網輕量化半實物調試系統,實現對小型電力線路巡檢機器人機身姿態的實時調控。采用基于多種傳感器的數據融合算法,結合窄帶物聯網技術,將小型電力線路巡檢機器人運動控制的各傳感器數據相關聯,實現穩定的輸電線路多機器人同步運動控制,為進一步全自動智能化巡檢提供技術儲備和參考。
1 巡檢機器人系統設計
對于輸電線路的越障機構,本研究中設計了橋式跨塔越障結構。經過深入的對比研究,保證高可靠性,絕對禁止出現墜落,因為地線下方就是特高壓輸電線路,所以不宜依賴跨越式的擺臂過塔頭,并且機器人本體必須加裝防墜落保險帶裝置。為了提高機器人在不同檔間的協同作業穩定性和連續性,既適應了現有電網的鋼塔結構,也可以相對減輕機器人的電池重量,一定程度上解決了以往機器人電池續航的問題。實現巡檢機器人的輕型化和實用化,另外,越障橋式結構造價低,安裝維護也十分方便。
因為本文研究的課題是面向未來多巡檢機器人,在不同檔距的電線上協同作業。所以首先要考慮的是機器人巡檢工作過程中不僅需要實時計算機器人自身姿態角度,而且需要根據自身和鄰近機器人的GPS定位信息進行自身運動規劃。
在機器人開啟和運動過程中,機器人需要對系統電源電壓實時監測,要求如下:
1)主動行進輪具有位置反饋(關鍵部位執行機構有碼盤反饋);
2)電池電壓實時監測和物聯網上傳功能;
3)實時將機器人運動狀態、以及傳感器信息傳至控制臺;
4)配備傾角、加速度計和陀螺儀傳感器,可實時獲得機器人三維姿態信息;
5)配備高精度的GPS定位模塊,配合高精度姿態算法將定位精度控制在一米以內。
6)機身搭載壓力傳感器,行動輪的限位開關以及簡單的氣象和線溫非接觸傳感裝置。
機器人組的各個機器人配置相同,其控制系統結構如圖1所示;地面控制端部分由主控計算機、控制箱體、以及窄帶物聯網接收端和圖傳數傳模塊組成[6]。主控平臺裝有機器人專用控制軟件,對于那些需要人工參與的復雜任務,操作人員可通過人機交互界面設置切換自動巡檢或實時人工控制機器人。或者更新巡檢路徑規劃,布置機器人做新的巡檢任務。
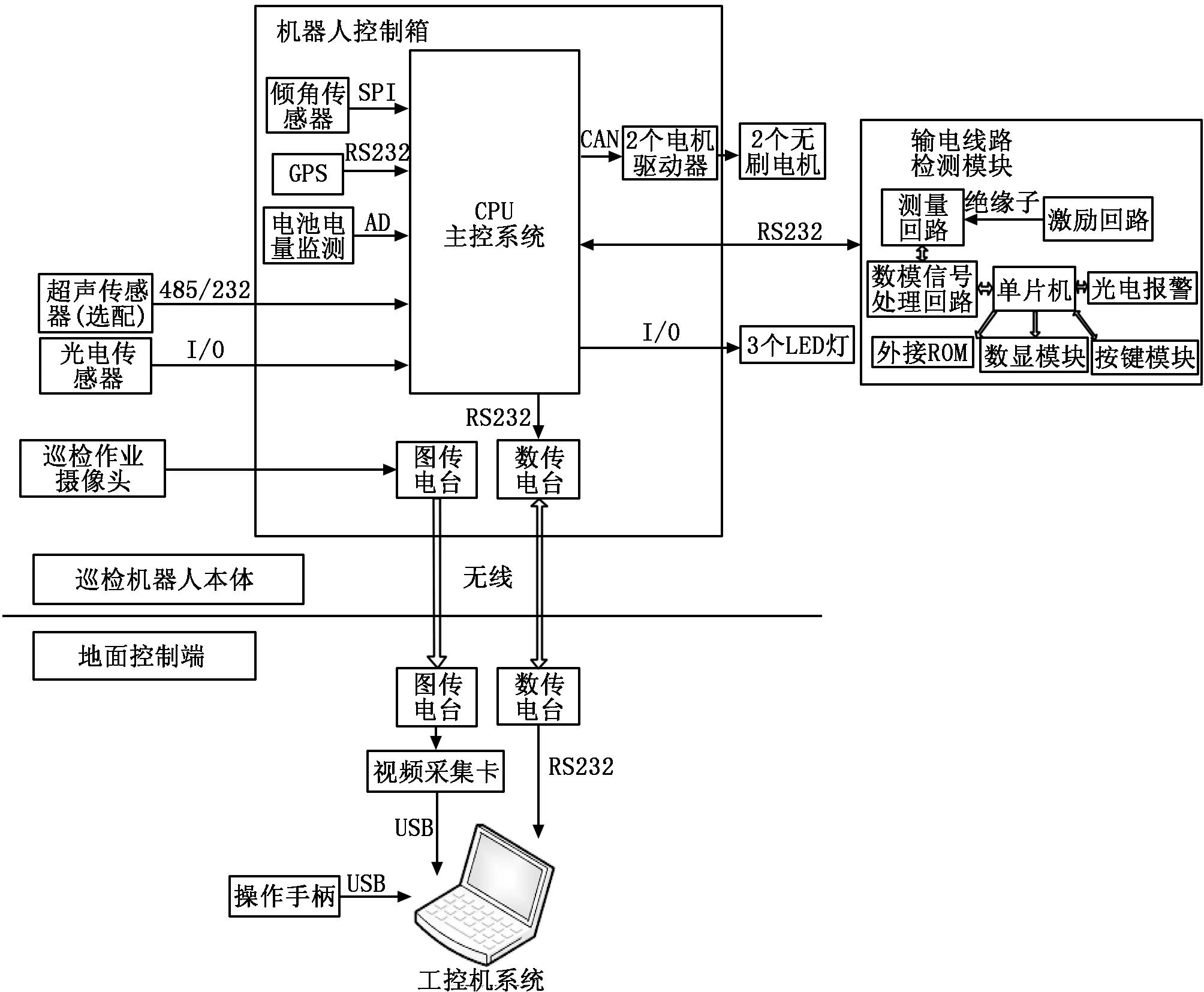
圖1 控制系統總體結構示意圖
機器人的本體的關鍵部分還有輸電線路檢測模塊,巡檢過錯方中可以通過單獨的檢測儀對線路和桿塔絕緣子進行電阻和放電檢查,機身本體還配有超聲波和巡檢攝像頭,便于實時觀測輸電線路、跳線和絕緣子金具的狀態,并通過高性能數傳和圖傳模塊與地面控制機交互。
2 基于物聯網的數據融合
2.1 多傳感器數據融合模型
多傳感器的數據融合模型數據的融合以及如何通過算法協同使用多個傳感器傳來的數據,并且使各個數據能夠有機融合,互相支撐以獲得對同一被控對象的客觀描述以及進一步的深入挖掘處理。這里就需要有針對性的開發一種具有較大的冗余和智能互補的特點。
在本研究中每一個機器人都配備了多種傳感器包括溫度,濕度加速度壓力風速等傳感器還有紅外和可見光的叫大數據量傳輸設備對于一些明顯的輸電線路在線監測故障數據。需要與紅外圖像在線識別功能相配合,達到更智能化的巡檢效果。例如監測到的溫度有上升明顯的情況要結合紅外圖像進一步確定是哪一種放電情況。應用最廣的數據融合的模型如圖2,是在美國學者的JDL數據融合模型,以及在此基礎上改進的一些樣本。
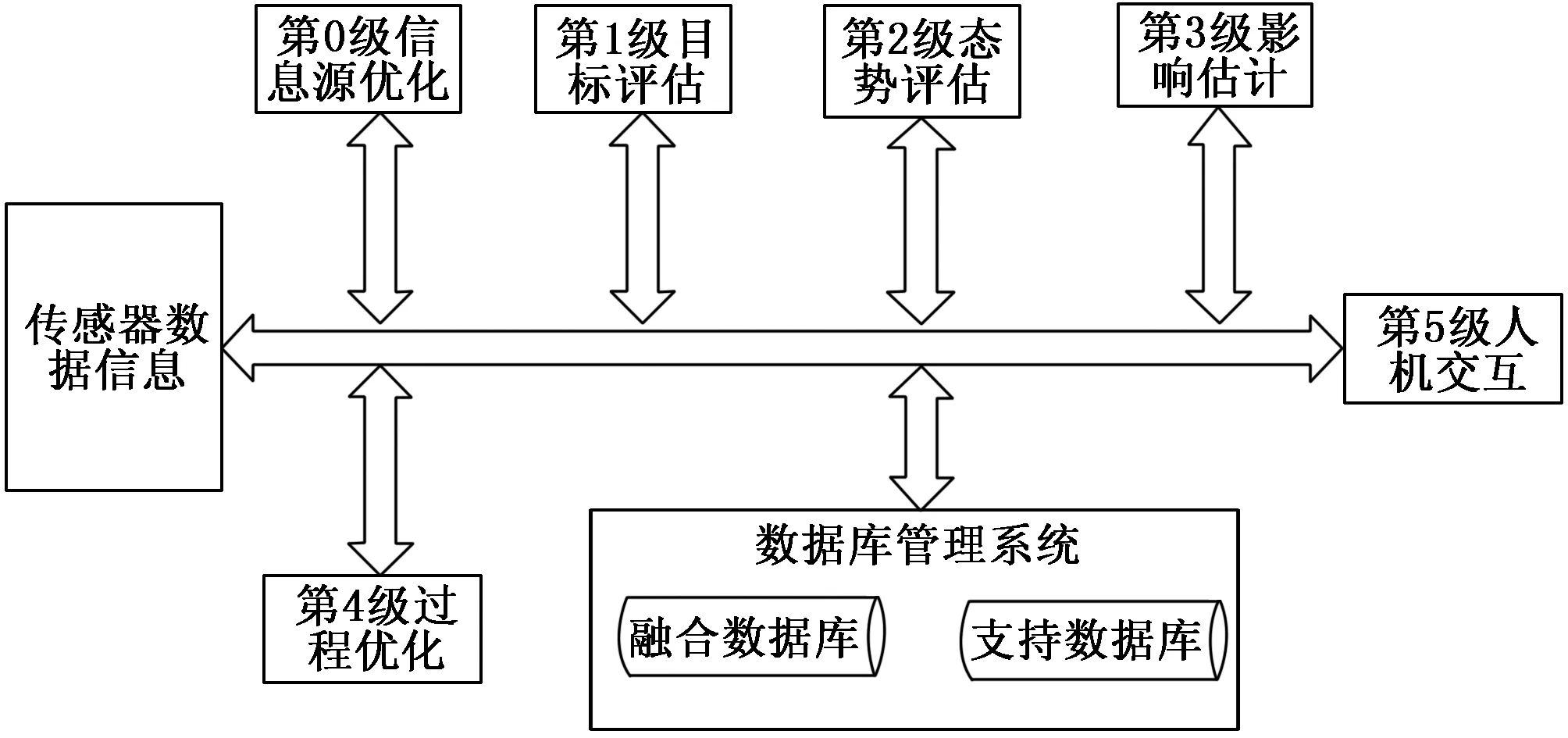
圖2 傳感器數據融合模型
如圖所示數據融合過程中,根據融合系統當中數據的模式識別和抽象算法的層次,可以分為數據級傳感器數據融合、決策級抽象數據融合和特征級模式融合[7]。數據融合的數據流流向一般按照原始向高級抽象的順序依次為:多個傳感器數據采集系統、模數轉換模塊、原始數據預處理器、特征提取模式識別計算模塊以及抽象數據融合計算器。本文正是采用這種結構,對于多個智體數據源用便于應用的加權平均法進一步處理[8]。
2.2 物聯網應用架構設計
在本文所設計的鄖縣物聯網機器人架構中多個機器人的協調控制是通過艾真體的形式來實現的。在整個控制系統中,每一個機器人被視為一個智能體。每一個智能體,都是一個能夠獨立完成計算機控制的人工智能終端。在此終端中集成大量巡檢人員的經驗和知識體系。智能體是計算機學科與控制學科的交叉成果。我們也是引薦智能體的結構,設計專用的程序來模仿人類從事電力巡檢的經驗和知識,進而驅動機器人作業執行機構。在巡檢的過程中,重點是兩個機器人的協同運動問題,要完成一個看似簡單的動作配合,需要有多個層級的參數進行調整,因此,作出類似人類的控制決策。我們必須在智能控制器中,加入很多模式識別算法和產生式規則,使得控制系統能夠有效運作。
智能體技術,眾所周知是一種分布式的智能技術一個智能體,可以在特定的環境中,完成擬人的某類任務[9]。例如,我們這個應用中,在戶外的高壓輸電線路。他的地線,環境運行,每個機器人能夠獨立運行,也能夠相互配合,運行。單個終端不僅具有信息處理功能,有獨立的知識庫,而且具有半自主的學習功能,在感知輸電線路環境,特征變量之后。
經過數據融合算法的處理生成特定的任務作業單。驅動整個機器人系統運行,并且把實施的數據處理結果傳到后方控制中心。在這種艾真體系統控制框架下,我們是要實現一個機器人智能控制同時呢,要實現相鄰機器人與之配合,滿足最優化的條件是在既定的網絡拓撲中,路徑最短,能量損耗最小,需要對機器人的速度和運行方向,進行動態規劃,一句兩個輸電桿塔,之間擋區的溫度,傾斜度,濕度,風度分數,磁場強度和地理位置進行實時分析,得出一個最優的控制方案,進而做出類似人工智能的決策,以前很多的控制參數,視頻巡檢人員的經驗進行確定的,而現在的每一個智能體可以看作是一個專家系統。這些專家的經驗,寫成機器人的內部算法。并且可以在不同的智能體,也就是智能群體之中互相交互,共享知識庫,使得整個大系統運行更經濟:本文為實現多個巡檢機器人的組織和協作,引入了多Agent模式,Agent之間的通訊采用最新型的窄帶物聯網[10]。多個機器人同時運動,實際上是一個多Agent的協調(Coordination):滿足系統目標或達到系統的和諧。協商(Negotiation):目的是消除沖突,爭取雙贏。協作(Cooperation) :目的是完成共同目標。結合多線程技術和雙通道通信技術,可以有效實現移動機器人之間的協調運動與作用。由于反饋回的線速度不是直接測得的,而是由加速度計測得的某個方向的線加速度,再經兩次積分運算得到的,其精度依賴于積分初值和參考坐標的矯正,所以準確性并不是很高。因此控制器的外環速度補償控制采用高精度的控制配置性價比不高, 而應在保證控制的快速性,重點在于整機的穩定性與魯棒性,再穩定運行的前提下盡可能提高精度。本設計通過GPS模塊實時測算機器人距離越障橋的距離,在輸電線路上,各個機器人都實時測距離并且預判位置的情況下,通過增加線速度補償控制器和一個角速度控制器 。依據速度補償控制器的輸入量為速度誤差。輸出相應的電機速度和功率補償量,本體中各電機驅動依據自抗擾非線性控制器原理設計。這樣的控制器不需要基于模型的大量數據運算,能耗要求不高,并且易于配置參數,尤其適合移動類執行單元的控制集成。
移動機器人智能體內部通訊軟件結構如圖3所示。
多Agent系統中應用閉環控制律的多移動機器人編隊算法,多移動智體的位置姿態模型如圖4所示。其控制目的為:在機器人編隊運行時,控制機器人之間的相對距離和相對(方位)角度,使之收斂并保持為設定值。
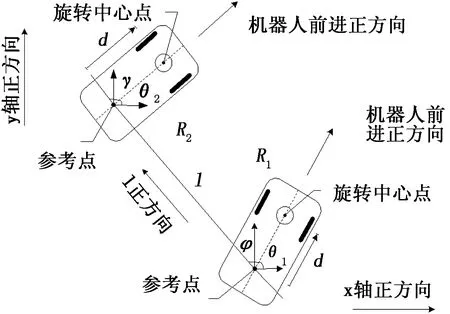
圖4 多移動智體的位置姿態模型
機器人行進的距離和角度:l和φ滿足如下關系式:
其中:l是執行機構機器人的行進距離,φ是前進方向的角度。
若leader-follower兩個機器人的編隊系統遵循l-φ閉環控制律,且l和φ是漸近穩定的。


A=
A和B都是有界參數,所以系統輸出的無窮范數有界,系統是穩定的。
3 實驗與算法仿真研究
在無線的窄帶物聯網環境中,實驗測試的實物機器實現了對選定的測試路線進行自動巡檢功能,所開發的機器人如圖5所示。在兩個相鄰的輸電線路檔內各安裝一個機器人樣機,在遠端模擬發生待處理操作事件,根據操作票,兩臺機器人同時向目標行進,對其軌跡進行自動規劃。過程中觀察并記錄兩巡檢機器人的運動情況。
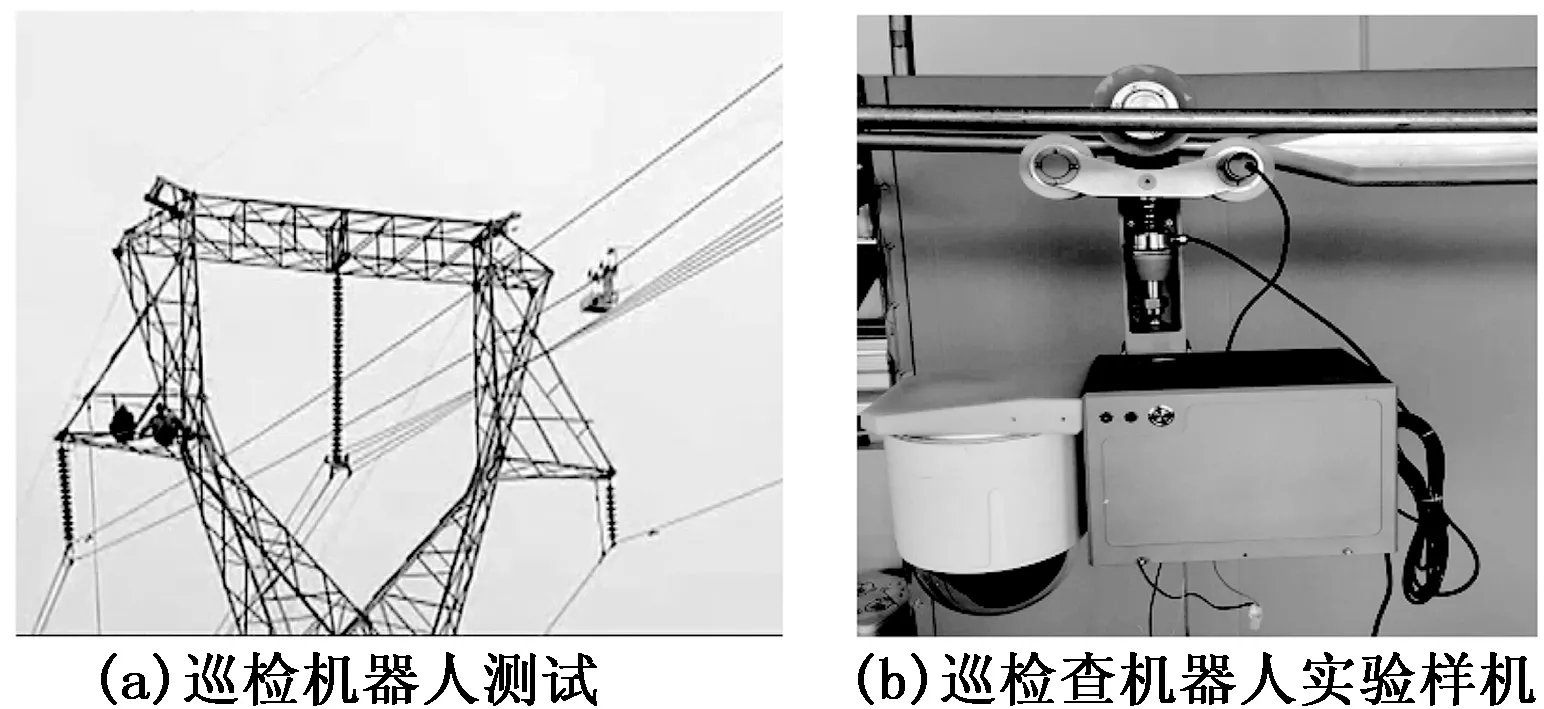
圖5 輸電線路巡檢機器人實物設計
對控制算法的研究與驗證過程中,首先對兩個機器人置于同一起點,并設定相同的目標軌跡。每個機器人的控制器采用自抗擾非線性控制器進行實時調節運動系統,得到兩個機器人對單個共同任務的軌跡跟蹤效果如圖6所示。
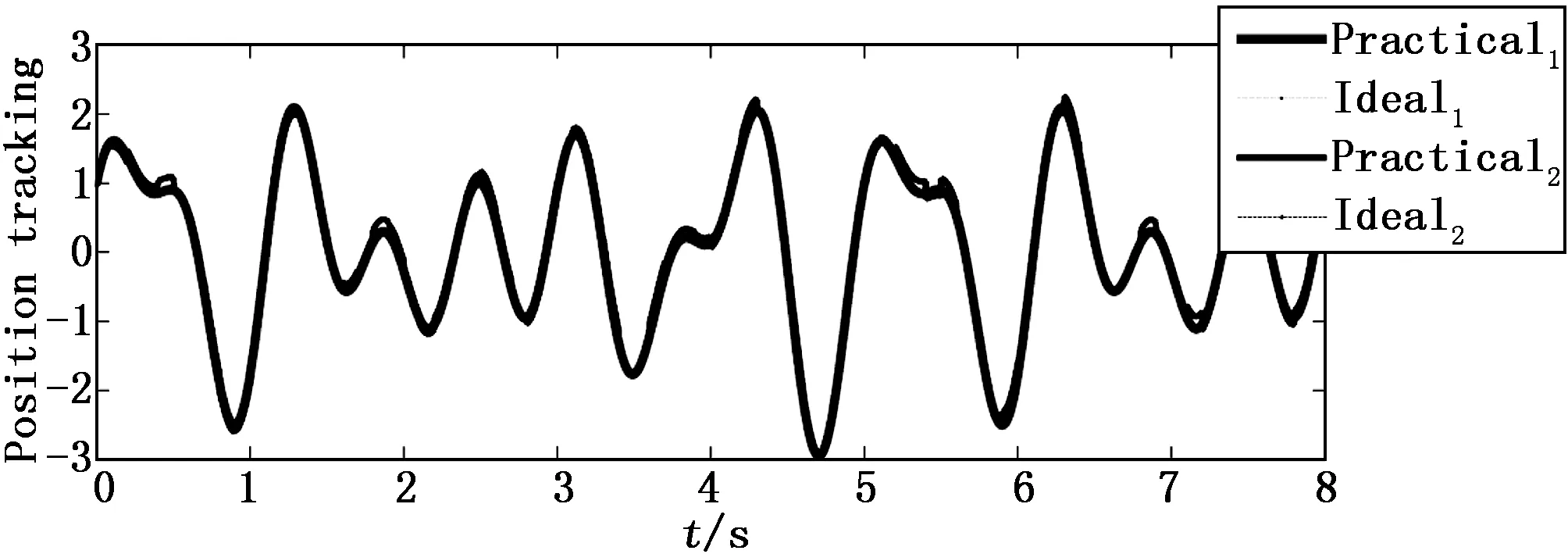
圖6 多機器人對單任務的軌跡跟蹤控制效果
結果顯示兩個機器人的運動軌跡能夠迅速跟蹤設定的軌跡,在短時間內到達目標值,運動位置偏差如圖7所示。
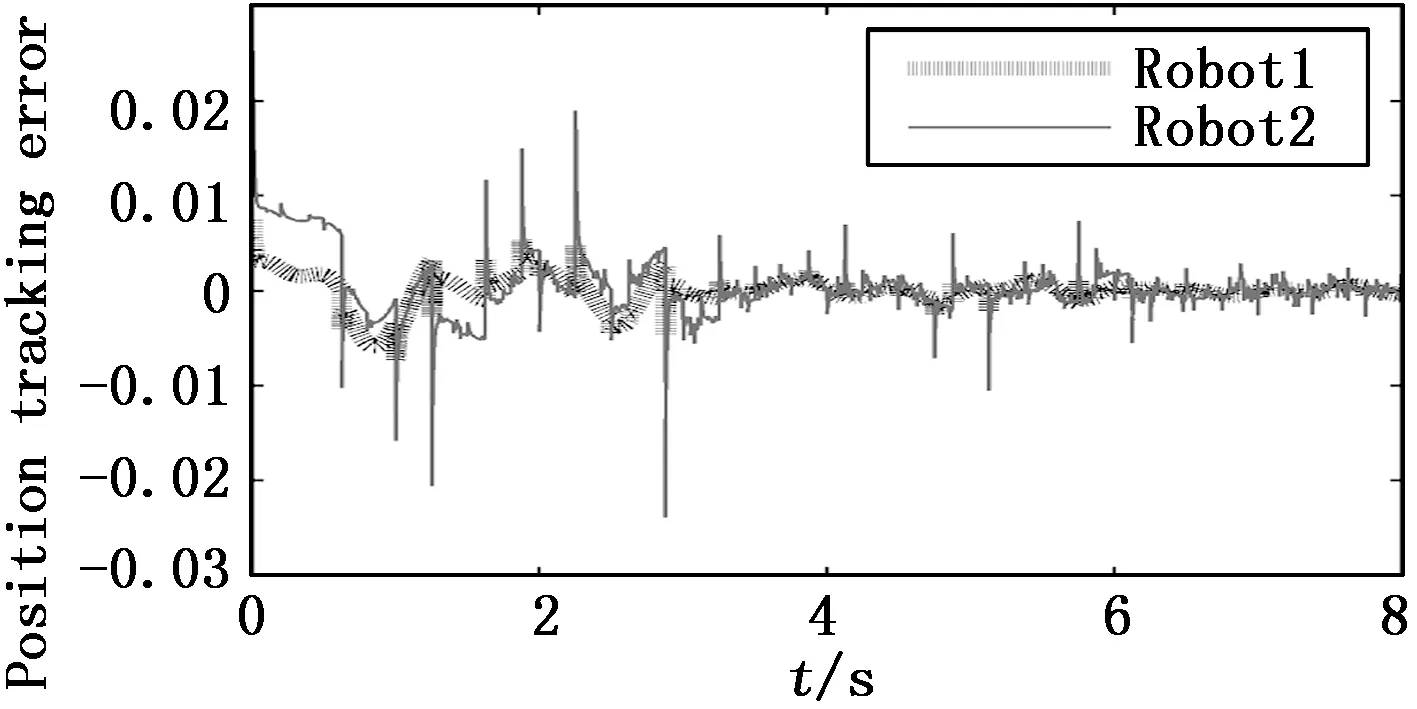
圖7 單任務情況下兩機器人運動位置誤差
在另一組對比實驗中,將兩個機器人賦予不同的目標值,同樣從相同的出發點出發,運動過程中不同的機器人通過物聯網的傳感機制實時獲取群體中其它個體的信息和勢場信息,并采用本文的協同控制機制,使得每個機器人在原單個行動的控制算法下,順利完成各自的運動軌跡。軌跡跟蹤的實驗結果如圖8所示:
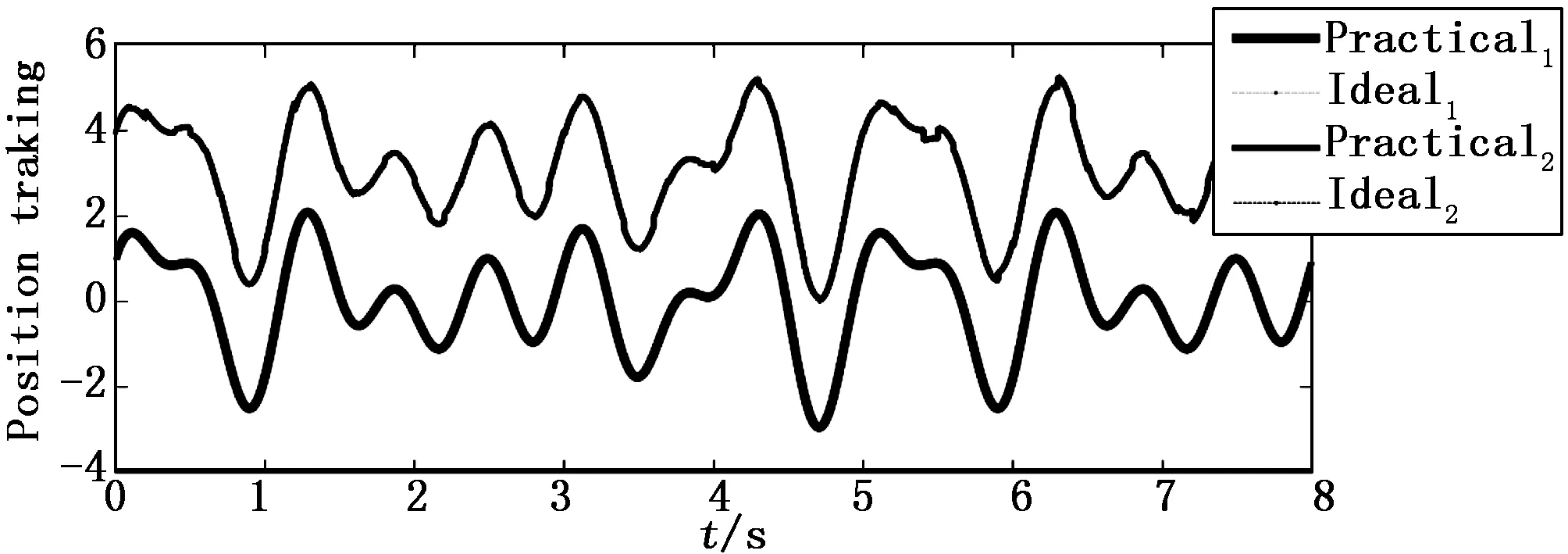
圖8 多機器人對多任務的軌跡跟蹤協同控制效果
為對比運動控制的效果,在新型物聯網環境下,多個機器人的協同控制效果明顯,不僅每個機器人可以實現各自的任務,而且軌跡跟蹤的誤差同樣快速收斂,并且總體誤差小于單個機器人的任務執行情況,兩機器人協同運動的軌跡誤差收斂情況如圖9所示。
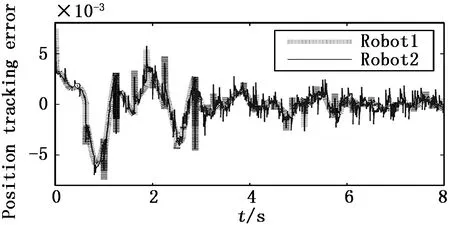
圖9 單任務情況下兩機器人運動位置誤差
實驗結果顯示,采用本文提出的控制策略,所設計的兩機器人協同運動的軌跡誤差不僅沒有增加,甚至還要相對于單任務誤差低一個數量級,充分顯示了該雙機器人控制算法和機器人本體設計的有效性。
4 結束語
本文圍繞開發具有多自由度的兩臺小型電力線路巡檢機器人進行了研究:采用小型姿態傳感器和自主研發的無線半實物調試系統,實現了小型電力線路巡檢機器人自身姿態的實時調控和自動巡線功能;并且搭建了基于Simulink的機身姿態調整仿真模型,使用自抗擾控制算法,很好地實現了姿態的實時跟蹤控制;本文重點研究基于自抗擾控制技術的多機協調控制策略。同時考慮到輸電線路環境的復雜性,在設計機器人本體中,引入了基于物聯網框架的多傳感器融合算法。最后通過算法仿真和設計制作實物樣機,測試本實驗裝置和控制策略的有效性,實現了輸電線路多機器人多任務同步自動巡檢的穩定控制。
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26