某撲翼飛行器風洞流場控制系統設計
2019-12-02 07:14:04
計算機測量與控制 2019年11期
(1.中國空氣動力研究與發展中心,四川 綿陽 621000; 2.中國科學院沈陽自動化研究所機器人學國家重點實驗室,沈陽 110016)
0 引言
撲翼飛行器是一種模仿鳥類和昆蟲飛行,基于仿生學原理設計制造的新型飛行器,具有便于攜帶、飛行靈活、隱蔽性好等特點,可用于生化探測與環境監測、災難救援、軍事偵察、情報竊聽等,可以完成許多其它飛行器無法執行的任務,在民用和國防領域有十分重要而廣泛的應用[1]。為了提高撲翼飛行器設計的精細化程度,需要研究環境風速、飛行器撲動頻率、飛行器迎角、飛行器翼型等對撲翼飛行器氣動特性的影響,得出撲翼飛行器升力、推力產生的基本規律, 為撲翼飛行器總體設計和氣動設計提供參考。據此,設計了某撲翼飛行器風洞。該風洞采用直流吸氣式結構形式,由喇叭口、穩定段、收縮段、平直段、試驗段、第一擴散段、過渡段、風扇段、第二擴散段等部段組成,總體結構示意如圖1。
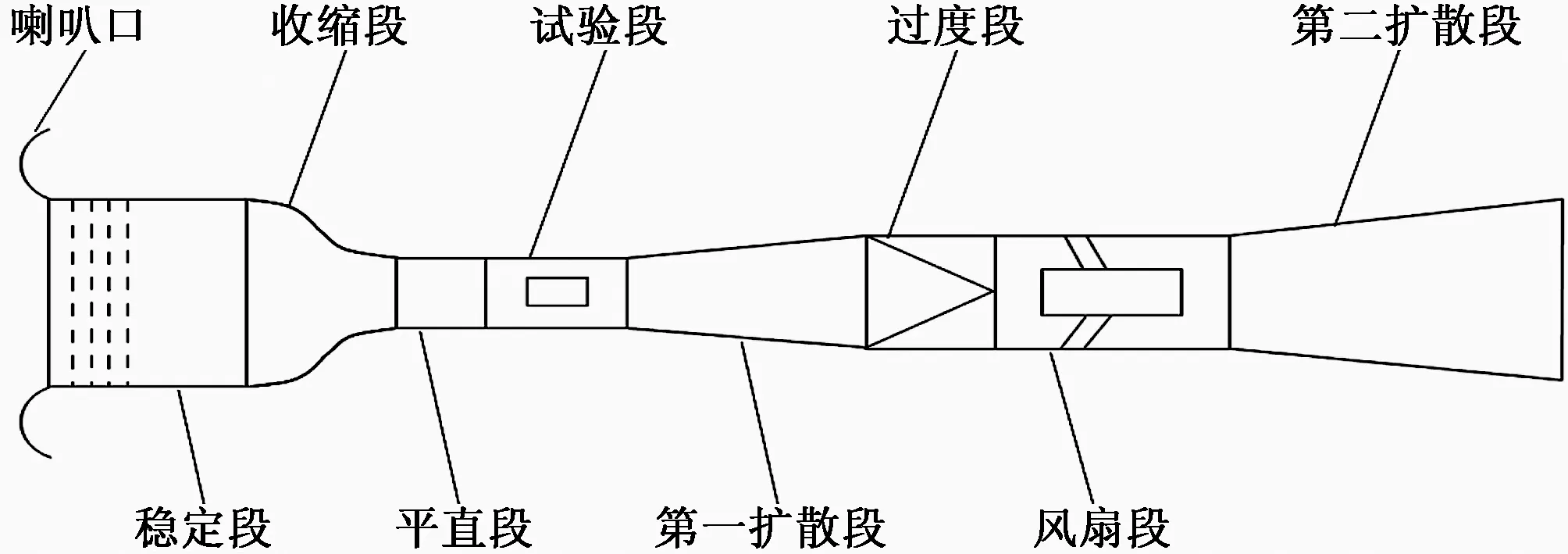
圖1 撲翼飛行器風洞結構示意圖
撲翼飛行器風洞氣動輪廓和洞體結構設計定型后,整個風洞的運行性能和效率很大程度上靠控制系統來實現,而流場控制作為控制系統中最核心的部分,其性能的優劣,直接關系到風洞的氣動流場品質,從而對最終試驗數據的準確性產生影響。根據試驗需求,本風洞流場要求具有更低的風速(風速范圍為2~30 m/s)、更高的風速控制精度(風速誤差≤0.2 m/s);同時,由于撲翼飛行器存在薄弱部件(如翅翼),在流場調節過程中,應盡量避免風速振蕩帶來飛行器應力的反復變化而導致薄弱部件損壞,也對流場控制性能提出了更高的要求。
1 流場控制系統總體設計
流場控制系統主要由控制器、傳感器、I/O子站、風扇電機、調速裝置等組成。
系統采用PLC作為核心控制器,配備相應的開關量及模擬量輸入、輸出模塊,實現系統的狀態監控、時序控制、邏輯控制以及控制算法等功能。
為了實現流場閉環控制,需要檢測試驗段風速作為反饋量。試驗段風速通過試驗段動壓、試驗段溫度以及大氣壓力折算獲得,需要配置相應的傳感器實時采集相關數據。其中,試驗段動壓傳感器對風速采集精度影響最大,根據風速范圍及風速控制精度要求,動壓傳感器選用量程為5000Pa、精度為0.01%的微差壓傳感器。
為了實現傳感器信號的高精度采集,同時避免長距離傳輸可能存在的信號干擾問題,在現場配置一套高性能I/O子站,實現傳感器信號的現場采集,并通過通信傳送給PLC控制器。
風扇電機選用異步電動機,采用變頻器作為調速裝置。電機非傳動軸端安裝增量編碼器用于反饋實際轉速,增量編碼器輸出TTL信號,分辨率為1 024 p/r,配合變頻器的M/T測速法和四倍頻技術,可實現風扇電機轉速的高精度采集。
系統設置安全聯鎖功能,主要實現操作權限的聯鎖、系統或設備運行條件的聯鎖、對系統或設備異常狀態進行報警并采取相應的應對措施、系統緊急停車聯鎖等功能。
系統配置現場人機界面和上位監控計算機,分別用于在現場和遠程實現系統運行參數設置、系統指令下達以及系統運行狀態實時顯示等功能。
流場控制系統采用工業以太網架構,配置如圖2。
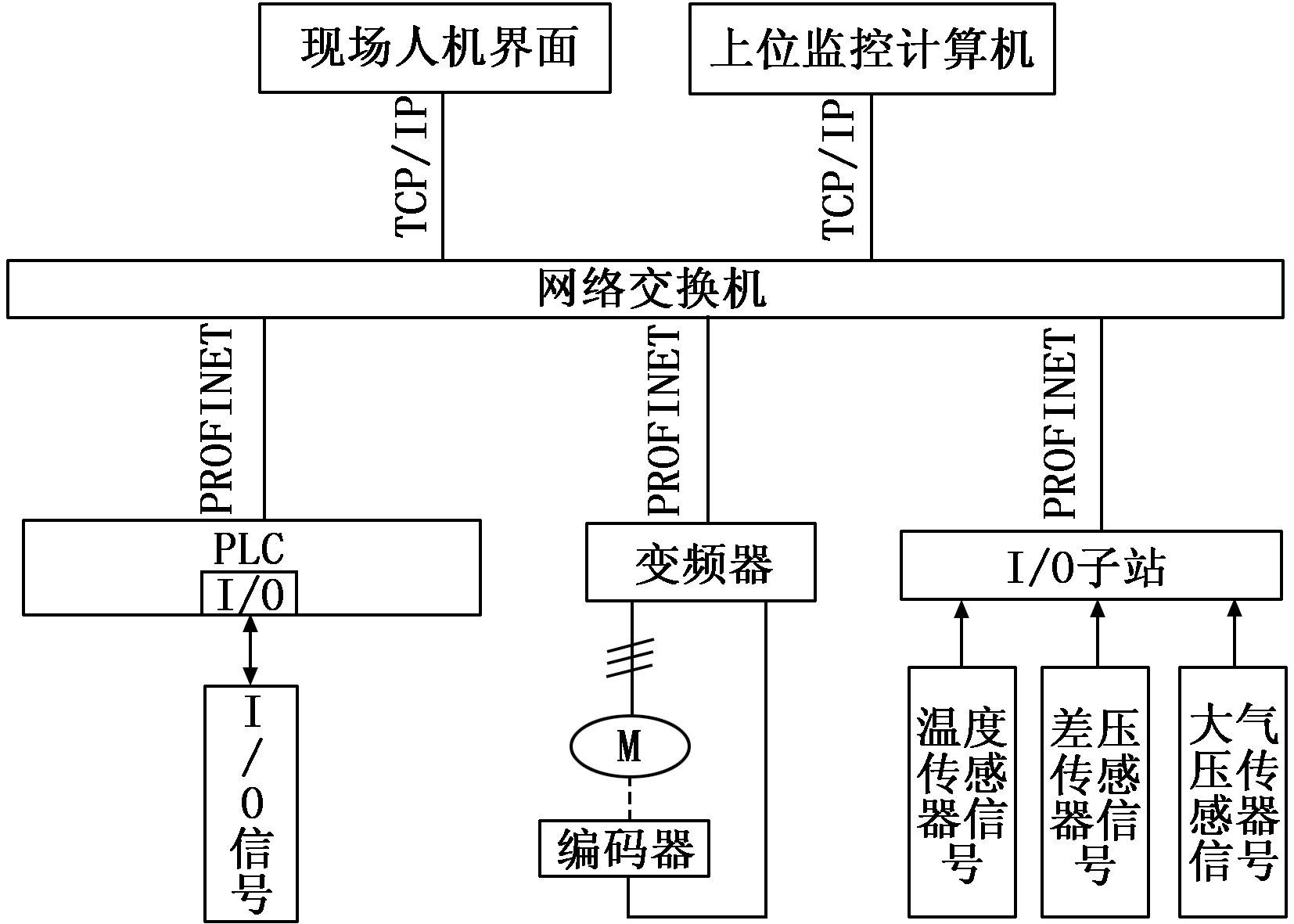
圖2 流場控制系統配置圖
變頻器、I/O子站與PLC控制器之間采用PROFINET I/O通信協議,現場人機界面、上位監控計算機與PLC控制器之間采用TCP/IP通信協議。
2 流場控制實現方式與控制策略
風洞流場的產生及變化是通過風扇的轉速控制來實現的,可將風扇的轉速認為是流場控制系統的控制點;而風洞流場的變化主要體現在試驗段風速的變化上,可將試驗段風速認為是流場控制系統的檢測點。
由于風洞流道較長,控制點與檢測點之間有一定的距離,且風洞穩定段容積較大,流場的建立需要一定的時間;同時,風扇電機的負載特性決定其在轉速調節過程中還存在著升速、降速時間。因此,流場控制系統是一個大滯后系統。
風洞氣流自身存在高頻和低頻壓力脈動,會產生氣流擾動;試驗模型的姿態角變化,會導致風洞堵塞度變化,加劇氣流擾動,影響流場的穩定性。
為了克服上述的滯后和擾動,提高系統的控制性能,流場控制采用帶轉速前饋的串級控制方式。其中,串級控制方式可以提高系統的穩定性和魯棒性[2-4],轉速前饋環節可以改善系統大滯后問題、提高系統的響應速度[5-7]。串級控制中,風扇電機轉速控制作為副控制回路,試驗段風速控制作為主控制回路,原理如圖3。
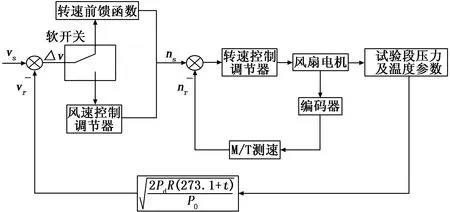
圖3 串級控制原理圖
圖2中,vs為風速設定值,vr為風速實際值,Δv為風速偏差,ns為風扇電機轉速給定值,nr為風扇電機實際值,Pd為試驗段動壓(通過差壓傳感器采集),t為試驗段溫度(通過溫度傳感器采集),P0為大氣壓力(通過大氣壓力傳感器采集),R為常數(一般取287.053)。
副控制回路由轉速控制調節器、風扇電機以及增量編碼器等環節組成,主控制回路由風速控制調節器、轉速前饋函數、軟開關、試驗段參數等環節組成。
帶轉速前饋的串級控制系統工作流程為:當外界擾動或改變風速給定值時,PLC控制器實時地將Δv與預設的誤差帶進行對比,當Δv在誤差帶范圍外時,通過軟開關觸發轉速前饋函數輸出風扇電機轉速給定值;當Δv在誤差帶范圍內時,通過軟開關觸發風速調節器輸出風扇電機轉速給定值;變頻器通過M/T測速法獲得風扇電機實際轉速值,根據PLC控制器輸出的轉速給定值,動態地調節風扇電機轉速,從而達到調節試驗段風速的目的。
2.1 風扇電機轉速控制
風扇電機轉速控制是流場控制的核心,其性能直接影響到試驗段風速的控制效果。
電動機轉子動力學方程如式(1):
(1)
式中,GD2為電動機和負載機械的飛輪轉矩,n為電機轉速,Td為電動機電磁轉矩,TL為電動機負載轉矩。
由式(1)可以看出,電動機負載結構形式確定后,其轉速主要受轉矩的影響,因此,轉速控制的關鍵是轉矩控制。
常用的交流電動機調速控制方式有3種:V/F控制、矢量控制和直接轉矩控制。其中,V/F控制只通過設定定子電壓和頻率來控制合成磁通勢矢量的幅值和旋轉速度,無法實現電磁轉矩的閉環控制。電動機電磁轉矩的變化主要由電動機的轉差變化引起,由于電動機慣量大,轉差變化慢,導致電磁轉矩響應慢,可能引起電磁轉矩的超調和振蕩,因此,V/F控制方式動態調速性能較差,無法滿足本系統的高性能調速要求。
而無論是矢量控制還是直接轉矩控制,其思想都是通過控制電動機磁通勢矢量的幅值及夾角來實現對電動機電磁轉矩的控制,進而使得在轉速調節環內有轉矩控制內環,提高調速系統的動態性能。
本系統采用矢量控制方式來實現風扇電機轉速閉環控制。矢量控制基本思路為:根據期望的電機轉速和磁鏈值計算定子電流的給定矢量,然后通過電動機模型、磁通控制塊、轉速控制塊和電流控制塊并結合風扇電機的電流、電壓和轉速信號,得到三相電壓給定信號,最后經過PWM調制即得到變頻器輸出,達到控制風扇電機轉速的目的。
為了保證控制性能,需要對矢量控制中的電動機模型、磁通控制塊、轉速控制塊、電流控制塊相關參數進行整定調試。
電動機模型用于得到轉子磁鏈的幅值Ψr和空間位置角φ,α-β坐標系下的風扇電機電流模型和電壓模型分別如式(2)、式(3):
(2)
式中,isα和isβ分別為定子電流的α和β分量,Ψrα和Ψrβ分別為轉子磁鏈的α和β分量。
(3)
式中,usα和usβ分別為定子電壓的α和β分量,rs為定子電阻。
磁鏈控制塊用以產生勵磁電流給定信號,本系統的風扇電機運行工況不存在超速運行,因此,磁鏈控制塊采用開環控制,其傳遞函數為:
(4)
式中,Lm為電機定、轉子繞組互感,Lr為電機轉子繞組自感,rr為轉子繞組電阻。
電流控制塊用以實現定子電流矢量的閉環控制,其傳遞函數為:
(5)
式中,K1為比例系數,T1為積分時間常數,Ti為小時間常數,Lrσ為轉子繞組漏感,Lsσ為定子繞組漏感。
轉速控制塊用以實現風扇電機轉速的閉環控制,其傳遞函數為:
(6)
式中,K2為比例系數,T2為積分時間常數,Teq為電流環等效時間常數,Tm為風扇電機的機電時間常數。
2.1.1 風扇電機參數整定
由式(2)~式(5)可知,電動機模型、磁通控制塊以及電流控制塊中,需要電動機定轉子電阻、定轉子漏感和互感等參數參與計算。部分參數可以通過電動機出廠檢測報告獲得,部分可以通過變頻器的電機參數辨識功能獲得,最終獲得的風扇電機參數如表1。

表1 風扇電機參數
2.1.2 轉速控制調節器參數整定
轉速控制塊采用基于PI調節器的閉環控制,可依據“基于典型系統的工程設計方法”對其PI參數進行整定調試。式(6)為典型II型的開環傳遞函數[8-9],PI參數應依據式(7)進行選取:
(7)
式中,Tn為電流環等效時間常數以及轉速環中所有濾波時間之和。
由于電流環等效時間常數遠小于轉速環中所有濾波時間之和,所以Tn可近似為轉速環中所有濾波時間之和,本系統設為30 ms。
風扇電機的機電時間常數Tm可由式(8)獲得:
(8)
式中,J為電機轉動慣量,TN為電機額定轉矩,nN為電機額定轉速。
將電機相關參數帶入式(8),可得風扇電機的機電時間常數為200 ms。
將Tn和Tm的實際值帶入式(7)可得到K2和T2的值分別為3.3和120 ms。
根據實際調試情況,對K2和T2進行調整,最終確定的PI參數為K2=3.0、T2=160 ms。
2.2 轉速前饋函數的確定
由于穩風速控制系統為大滯后系統,過早投入風速閉環控制,容易產生超調,甚至導致系統震蕩。因此,引入轉速前饋環節。系統設置風速誤差帶,當實際風速與給定風速偏差在誤差帶ε1范圍外時,根據給定風速,通過軟開關觸發轉速前饋函數預置電機轉速。
轉速前饋函數為給定風速與風扇電機給定轉速的對應關系,其獲取方式為:在風扇電機全轉速范圍內,分若干個階梯給定電機轉速,記錄下每個電機轉速下對應的試驗段風速,根據記錄數據擬合函數曲線。
綜合權衡擬合的精確程度和控制器的運算量,本系統采用二次多項式函數擬合,如圖4。
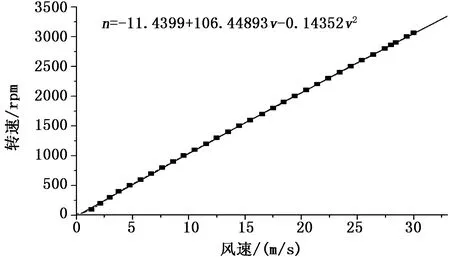
圖4 轉速前饋函數擬合
圖中,n為風扇電機轉速,v為試驗段風速。
在用于擬合的數據點外,隨機選取若干個數據對前饋函數的擬合效果進行校核,校核結果作為試驗段風速閉環控制觸發誤差帶的選擇依據。
2.3 試驗段風速閉環控制
風扇電機轉速控制環調節電機轉速至前饋函數預置值,如果此時風洞實際風速與給定風速之間的偏差在設定的誤差帶ε2內,則不觸發試驗段風速閉環控制;如果偏差在誤差帶ε2外,則觸發試驗段風速閉環控制。
試驗段風速閉環控制采用位置式數字PI調節器,其表達式為:
(9)
式中,u(k)為本次控制作用,uI(k-1)為前次積分控制作用,e(k)為本次誤差,K3為比例系數,T3為積分時間。
PI調節器的參數對系統的控制性能影響較大,在對控制性能要求較高的系統中,單靠整定PI參數無法滿足系統的穩態、動態性能要求。數字控制系統中,衍生出了如積分分離法、參數分段法等較為實用的改進PI算法,用以提高系統的靜態和動態控制性能指標[10-12]。
本系統采用定I參數、變P參數的方法,在風速偏差較大區域,采用較大的比例系數,使實際風速能迅速接近給定值;在風速偏差較小區域,采用較小的比例系數,防止系統超調或振蕩。根據實際調試,PI參數整定如表2。

表2 試驗段風速閉環控制PI參數
風洞存在氣流擾動,而擾動導致的風速波動可能又在風速控制精度范圍內,此時并不希望頻繁調節風扇電機的轉速。因此,設置了控制死區,當風速到達一定的誤差帶內后,則令風速誤差為零,控制器保持當前輸出控制量。
死區閾值設置的過大會降低控制精度,過小又起不到減少無效調節的作用,本系統設置為風速控制精度指標要求的一半。
3 軟件設計
流場控制系統軟件采用STEP7 Professional V13進行開發,實現風扇電機啟停控制、風扇電機轉速控制、變頻器參數和狀態讀取、系統狀態參數讀取、試驗段風速控制、風洞運行安全聯鎖、接收和響應運行管理計算機發出的參數和指令、向運行管理計算機上傳試驗參數和設備狀態信息等功能。
軟件采用模塊化設計,主要包括數據采集模塊、試驗段風速閉環控制模塊、風扇電機轉速前饋控制模塊、設備狀態監測模塊、安全聯鎖模塊等。
主要算法實現方法為:
1)根據試驗段給定風速值vs和試驗段風速實際值vr,判斷風速偏差Δv的誤差區間。
2)Δv≥ε1時,調用轉速前饋函數,PLC輸出給定轉速,變頻器進行轉速閉環控制,風扇電機運行至相應轉速。
3)ε2<Δv≤ε1時,調用試驗段風速閉環控制模塊。若Δv>1 m/s,將風速閉環控制比例系數設為5.0;若0.4 m/s≤Δv≤1 m/s,將風速閉環控制比例系數設為2.0;若Δv<0.4 m/s,將風速閉環控制比例系數設為1.7。變頻器根據PLC輸出控制量動態調節風扇電機轉速。
4)Δv≤ε2時,進入控制死區,此時PLC保持輸出控制量不變,變頻器維持當前風扇電機轉速。
4 試驗結果與分析
試驗工況:風洞帶模型試驗,在試驗過程中隨機改變模型姿態角,測試風扇電機穩態轉速精度和試驗段穩態風速精度。
風扇電機穩態轉速精度測試方法為:給定6個轉速階梯,每個階梯轉速穩定后,通過上位監控計算機采集當前實際轉速,采樣頻率為5 Hz,每個階梯持續采集20 s。根據采集的數據計算轉速控制精度,計算公式為:
(10)
測試結果如表3。
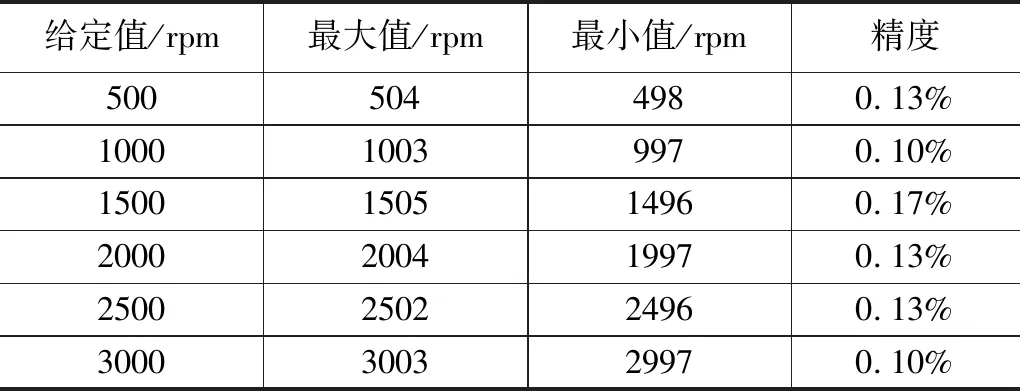
表3 風扇電機穩態轉速精度測試數據
試驗段穩態風速精度測試方法為:給定6個風速階梯,每個階梯風速穩定后,通過上位監控計算機采集當前實際風速,采樣頻率為5 Hz,每個階梯持續采集20 s。根據采集的數據計算風速控制精度,計算公式為:
ε=|vr-vs|max
(11)
測試結果如表4。
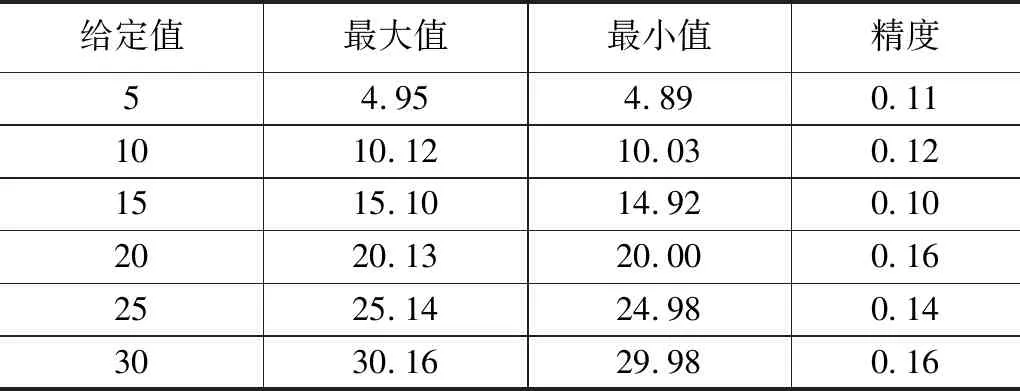
表4 試驗段穩態風速精度測試數據 m/s
圖5為給定風速20 m/s時的調節過程,圖6為穩定后的風速。
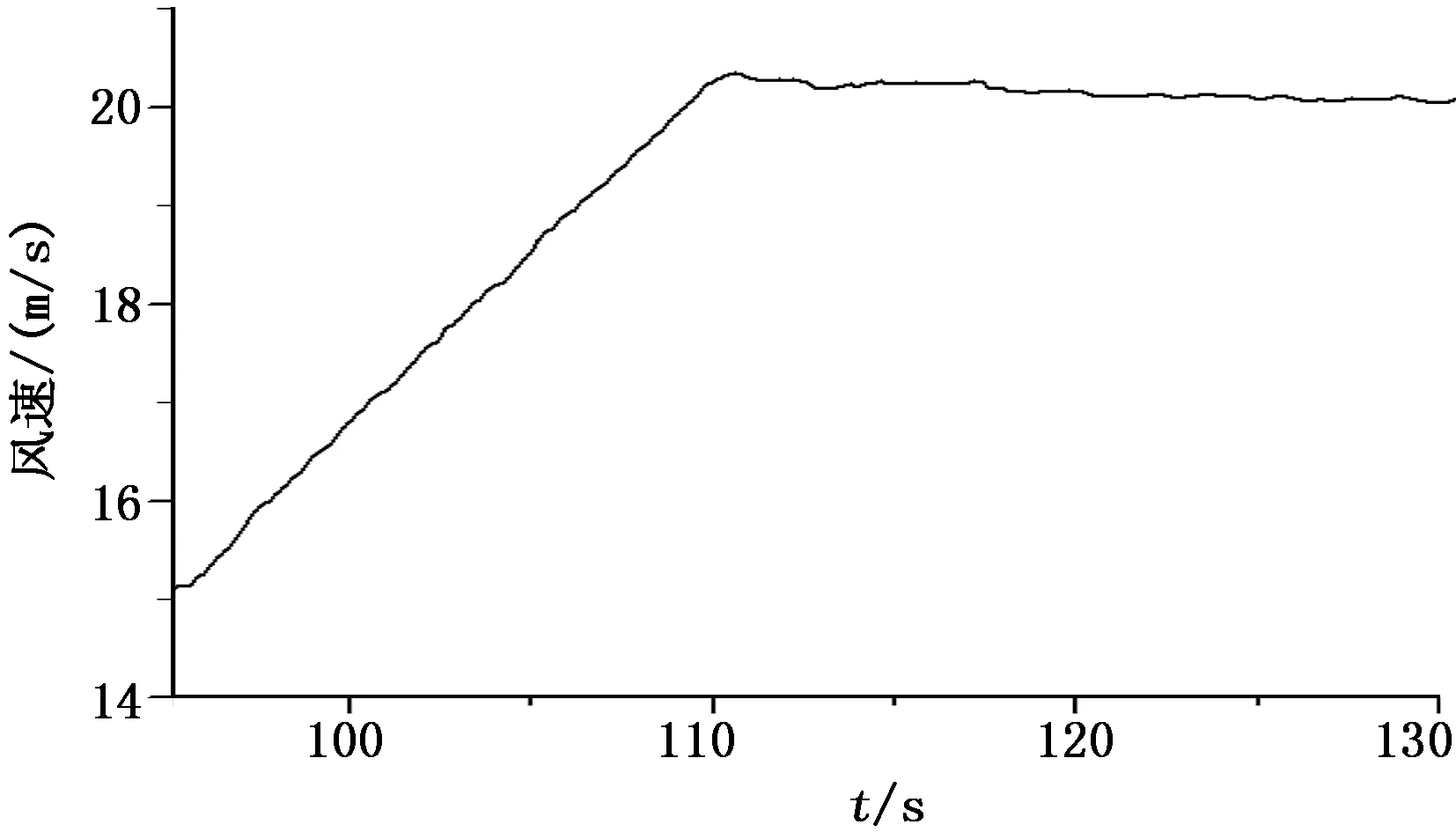
圖5 給定風速20 m/s的調節過程
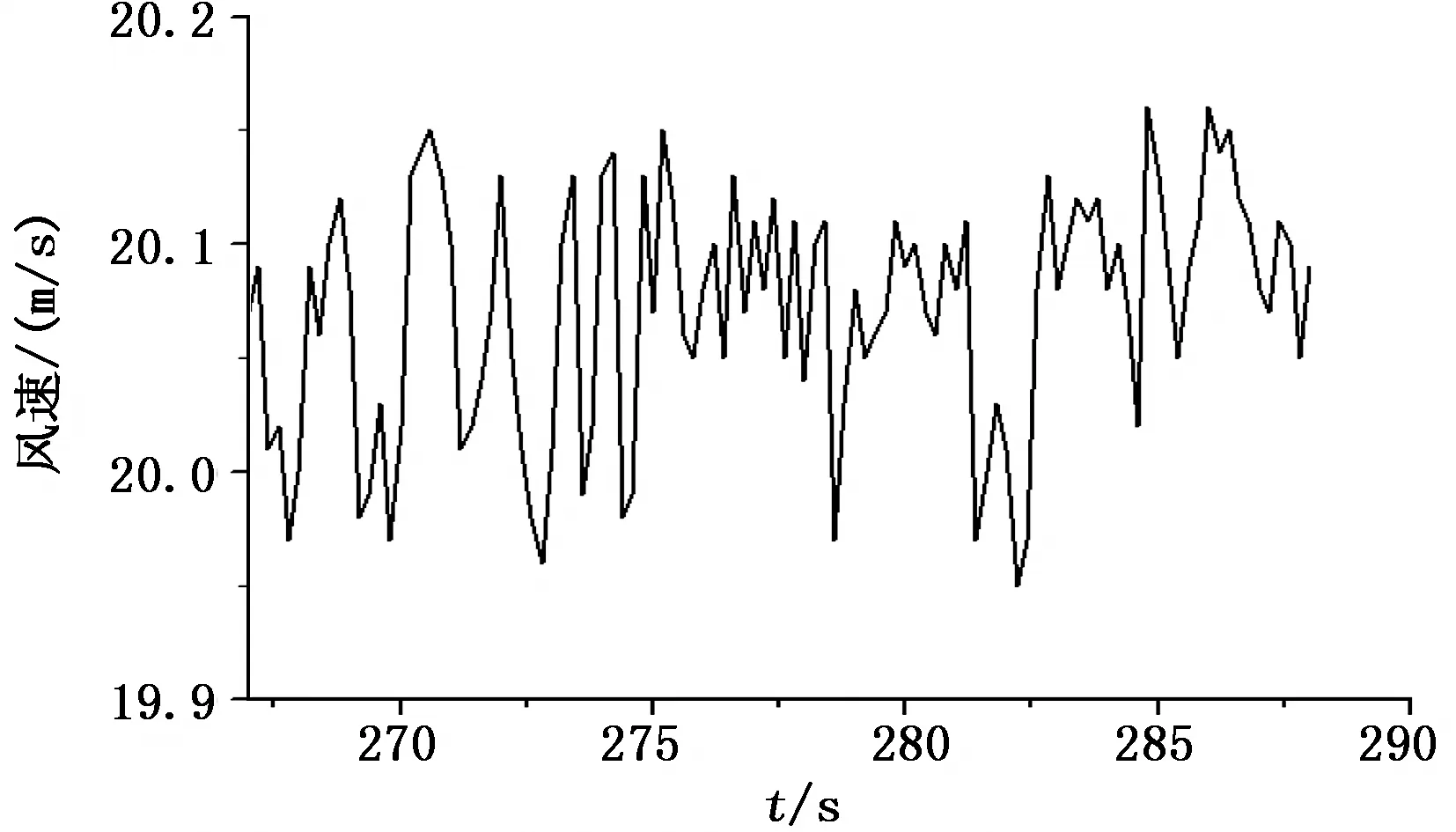
圖6 給定風速20 m/s的穩態風速
從表3和表4可以看出,風扇電機穩態轉速精度滿足η≤0.2%的指標要求,試驗段穩態風速精度滿足ε≤0.2 m/s的指標要求。
從圖5可以看出,風速調節過程整體平穩。由于采用了分段式PI參數,在保證調節速度的同時,系統的超調量控制在了較小范圍內,調節過程中無明顯振蕩。
圖6顯示了風速的穩定狀態,期間,試驗模型姿態角進行了調節,由于風扇電機轉速控制內回路的存在,試驗段風速并沒有受到明顯影響,系統具有較好的魯棒性。
5 結束語
流場控制系統采用帶轉速前饋的串級控制方式,通過設計合理的控制調節器,較好地解決了試驗段風速快速調節與超調振蕩的矛盾;風扇電機轉速控制回路對試驗模型姿態變化帶來的擾動具有較好的抑制作用;風洞流場具有較高的控制精度,滿足設計指標要求。可為后續的撲翼飛行器的氣動性能試驗提供流場保證。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
西南交通大學學報(2016年4期)2016-06-15 20:29:37
電測與儀表(2015年8期)2015-04-09 11:50:06