三坐標DBF雷達SystemVue仿真建模方法研究
2019-12-02 07:14:36
計算機測量與控制 2019年11期
(陸軍工程大學石家莊校區,石家莊 050003)
0 引言
SystemVue仿真軟件是Agilent公司近些年大力發展的一款電子系統級仿真工具軟件,主要針對于通信、雷達、導航和電子戰等領域。它以圖符化模塊構建理論模型,是一個適用于動態系統分析的仿真平臺,能夠對系統設計進行數字仿真,完成系統性能的合理分析和仿真評估[1]。它具有與外部文件相通的、開放的算法建模接口,可直接獲得并處理輸入/輸出數據。同時,可以與Matlab、C++、HDL、DSP、FPGA、ADS等軟件互聯使用。與其它仿真軟件相比,SystemVue仿真軟件具有明顯的優越性,尤其在射頻模塊方面:支持射頻-基帶聯合仿真;支持數據流仿真;模塊齊全,可直接進行搭建。以上這些優點基本滿足雷達仿真的需求,在雷達系統仿真方面有很好的應用前景[2-3]。
當今雷達基本上都采用三坐標體制,能為操作員提供空中目標的高度、速度、方位等詳細信息。數字波束形成(DBF)技術是新一代雷達實現三坐標所采用的一種先進技術。其實質是對不同來向的信號進行增強和抑制。DBF雷達通過對權值的控制可以完成自適應置零,天線自校正,低副瓣等功能,這些特點大大提高雷達系統的抗干擾能力、分辨力等,因而得到廣泛應用。數字波束形成(DBF)技術分為普通數字波束形成和自適應數字波束形成兩種,區別在于后者能夠自適應地在干擾方向形成“零點”。本文對其中較為先進的自適應數字波束形成基本原理進行介紹,并利用SystemVue軟件平臺對DBF體制雷達進行建模,最后給出以線性調頻脈沖發射信號受到干擾的情況的仿真結果。
1 三坐標搜索雷達空域掃描基本理論
1.1 空域掃描方法
通常三坐標雷達方位掃描采用機械掃描方式,或者機掃加相掃。而仰角覆蓋方式有:堆積多波束和電掃描兩種。其中電掃描根據實現所用的基本技術的差別,又可分為頻率掃描法、相位掃描法、頻相掃描法、數字波束形成等[4-6]。
1.2 自適應數字波束形成的基本原理
數字波束形成技術,一般是針對接收陣列天線而言的,利用陣列天線的孔徑,通過數字信號處理在期望的方向形成接收波束。數字波束形成技術兼有相掃和堆積多波束體制的特點,其物理意義是:陣列上每個天線的方向圖都是全向的,接收來自各個方向的信號,利用數字處理方法,對陣列多個接收通道中某一方向的入射信號進行加權求和處理,補償由于每根天線空間位置不同引起的傳播波程差導致的相位差,實現該方向的最大能量接收,相當于在該方向上形成了一個“波束”。可以通過改變權值,使得波束指向不同的方向,實現波束的掃描。通過多通道并行處理可以同時形成多個波束,還可以選擇合適的窗函數來降低副瓣電平。圖1是利用數字波束形成技術對n個波束進行自適應數字多波束形成的原理框圖[7]。
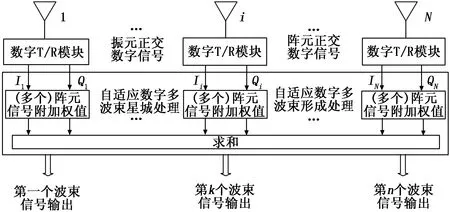
圖1 自適應數字多波束形成原理框圖
圖1中每個陣元接收的射頻回波信號送至數字T/R模塊的接收通道,經過接收系統相應的處理,輸出正交的I/Q數字信號。數字波束形成模塊對每一個波束的每個I/Q數字信號分別進行復加權和求和運算處理,形成所要求的波束。
其具體復加權和求和運算用矢量方式表達如下所示:
對于N陣元天線,N個數字T/R模塊輸出的信號矢量為:
X=[x1…xi…xN]T
(1)
第i個T/R模塊輸出的復信號xi為:
xi=Ii+jQi
(2)
則第1個、第k個、第n個波束的接收信號的矢量的加權矢量W1、Wk、Wn分別為:
W1= [W11…W1 i…W1N]T(3)
Wk=[Wk 1…Wki…WkN]T
(4)
Wn= [Wn 1…Wn i…WnN]T
(5)
加權后的復信號經過相加、求和之后,便可以得到第1個、第k個、第n個波束的輸出函數:
F1(θ) =W1TX
(6)
Fk(θ) =WkTX
(7)
Fn(θ) =WnTX
(8)
|F1(θ)|、|Fk(θ)|、|Fn(θ)|分別是第1、k、n個波束的方向圖函數。不同方向的F(θ)模值不同,實現了對方向角θ的選擇,即實現了空域濾波[8-9]。
2 三坐標DBF雷達設計相關軟件模塊
2.1 SystemVue雷達模塊
SystemVue是以圖符化模塊構建理論模型,對電子系統電路的實際工作狀態進行虛擬現實地仿真模擬,完成電子線路功能和電路特性的詳細分析。其雷達庫包括完整的信號源、發射系統、接收系統、天線收發、環境和信號處理等12類模塊。模塊齊全,功能完善,能夠適應雷達系統仿真的絕大部分需求。在這里我們主要研究陣列收發、陣列信號處理這兩類模塊。
2.2 陣列收發模塊
RADAR_Phased Array_Rx是相控陣接收天線模塊,利用該模型可以對線性陣列和任意平面陣列接收功能進行仿真。其參數有以下幾類:相控陣天線模式、天線坐標軸/軸平面設置、二維陣列形狀、陣列天線單元數、陣列天線單元位置分布、可靠性參數、天線坐標中的目標仰角和方位角、天線坐標中波束仰角和方位角、窗口函數設置、移相器設置等。其輸入有:從空間接收或上一級傳輸的射頻信號、天線坐標中的目標仰角和方位角參數信號、天線坐標中波束仰角和方位角參數信號。其輸出是相控陣天線各接收通道輸出的射頻信號。
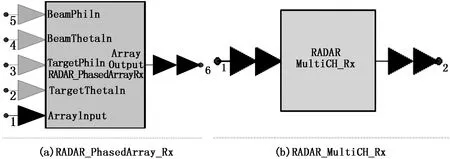
圖2 陣列收發仿真模塊
RADAR_MultiCH_Rx是多通道接收機模塊,利用該模型可以對多通道接收機輸入信號從射頻到基帶的處理過程進行仿真。其參數有:接收機內部本振頻率、輸出噪聲頻譜密度、基準相位、I/Q通道的增益/相位不平衡度、通道數目、通道的不平衡系數等。其輸入是上一級的射頻信號,其輸出是正交的I/Q數字信號。
2.3 陣列信號處理模塊
RADAR_ADBF,陣列最佳濾波器,該模型根據最優化準則,通過模型內嵌的最佳權向量準則(MMSE、MVDR、MSNR)完成接收信號權系數的求取與更新。其仿真雷達一般為矩形陣列接收天線,ADBF模塊的參數有:矩形陣列天線X軸/Y軸中的單元數,X軸/Y軸的天線單元間距,對天線仰角關注的程度,對天線方位角關注的程度,波形基帶采樣率,估計系數矩陣的樣本個數(通常將樣本數量設置為信號通道數量的10倍或更多)。ADBF模塊的輸入有:用于估計權重的輸入信號,天線重點關注方向的仰角/方位角。其輸出是輸入信號的權重。
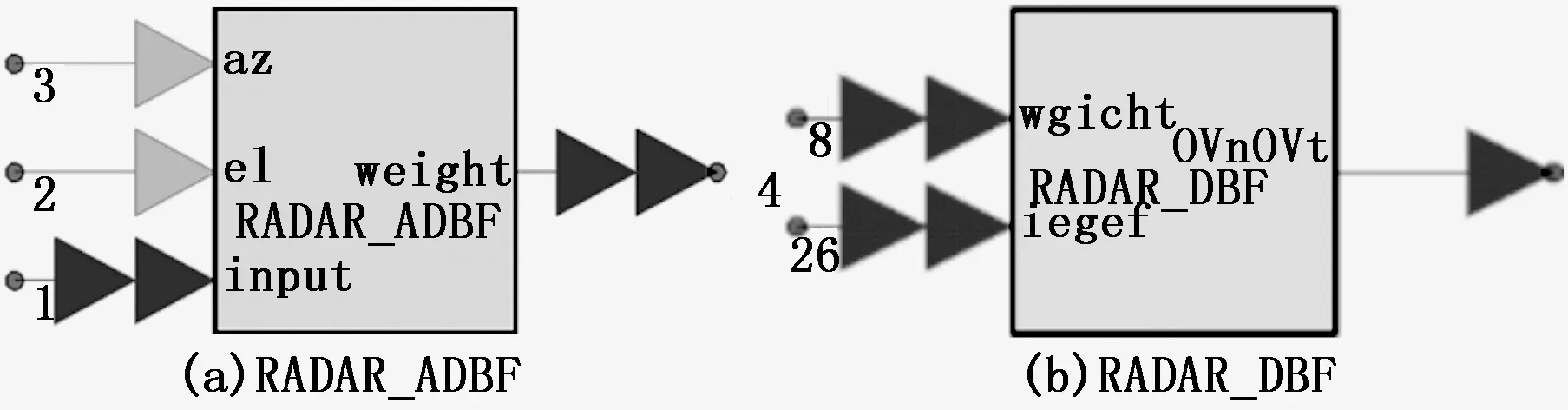
圖3 陣列信號處理模塊
RADAR_DBF數字波束形成模塊,用來完成數字基帶信號與權系數的相乘、加權求和運算從而實現數字波束形成。其輸入是接收機每個接收通道輸出的I/Q數字信號和每個信號的權系數(來自ADBF模塊),輸出是完成自適應數字波束形成處理后的信號。其功能有:改變波束指向,干擾的自適應消除,提高目標和干擾器的高分辨率角度估計等。
在進行自適應數字波束形成仿真時,RADAR_ADBF模塊來估計接收信號的權系數并將權系數輸入到RADAR_DBF模塊中實現數字波束形成,兩者共同完成自適應數字波束形成。
2.4 自適應數字波束形成最佳權向量準則
自適應數字波束形成是在最佳權向量準則下尋求最優權矢量,完成接收信號權系數的求取與更新,SystemVue軟件中RADAR_ADBF模塊內嵌的算法準則為MMSE、MVDR和MSNR。
2.4.1 最小均方誤差準則(MMSE)
MMSE準則是利用參考信號求解權矢量的一種準則,參考信號根據期望信號特性求得。其數學定義是:使未知量與已知量的均方誤差達到最小化,在這種條件下來確定所需的未知量。陣列自適應權矢量的求解是使參考信號與陣列加權相加的輸出信號之差的均方值最小化。應用該準則的前提尋找輸入信號與期望信號的互相關矩陣,計算量大,是一種最優維納解,多應用于旁瓣相消和自適應均衡。
2.4.2 最小方差無失真響應準則(MVDR)
MVDR是一種基于最大信噪比準則的自適應的空間波數譜估計算法。通過MVDR算法得到的權系數可以使在期望方向上的陣列輸出功率最小,同時信噪比最大,有良好的弱信號檢測、高分辨力和噪聲抑制性能。MVDR算法采用矩陣求逆(SMI)算法,具有較快的收斂速度。該算法存在兩個問題:(1)在強干擾存在的情況下,容易產生病態解;(2)在有限次快拍條件下,協方差矩陣估計存在誤差,帶來一定的信噪比損失。
2.4.3 最大信噪比準則(MSNR)
MSNR準則是在輸出信噪比最大的條件下求得最優權矢量,應用該準則需要知道信號自相關矩陣和噪聲自相關矩陣,需要的樣本數較大,計算量大,是一種最優維納解。
3 三坐標DBF雷達仿真實現
上文我們對的自適應數字波束形成原理和相關仿真軟件模塊進行了介紹。在這里我們對DBF體制三坐標雷達進行仿真。
3.1 DBF雷達仿真原理
DBF體制雷達,接收時全向接收各個方向的信號, 將目標信號與環境中的雜波、干擾一同接收,在通過DBF模塊自適應權矢量的求解后,判定出目標信號方向和干擾信號方向,用數字方法調整陣列接收的方向增益聚集在目標信號的方向上,并對干擾信號方向進行抑制。該雷達仿真的關鍵在于對多路接收信號進行自適應數字多波束形成處理。其主要由兩部分組成,一部分是陣列最佳濾波器,其功能是根據最佳權向量準則完成權系數的求取與更新;另一部分是數字波束形成模塊,其功能是完成數字基帶信號的復加權和求和運算,進而得到波束信號[8]。
3.2 仿真場景設置
在DBF雷達坐標30度方向上設置一個信號發射器向DBF雷達發射線性調頻脈沖信號(以下簡稱發射信號),在雷達坐標60度方向上設置有一個干擾器發射干擾信號。發射信號與干擾信號經過一段理想空間傳播,到達DBF雷達處,被DBF雷達的相控陣天線一同接收,兩者的混合信號進入DBF雷達。
3.3 DBF雷達仿真建模
根據雷達仿真基本原理[10-12],總體仿真框圖如圖4所示。
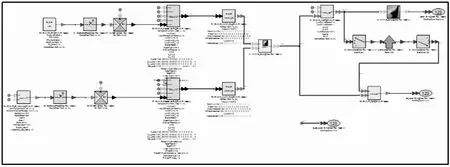
圖4 DBF體制三坐標雷達仿真
為了能夠清晰地分析整個仿真框圖,將其分成幾個分塊圖進行解釋說明,分別如圖5~8所示。
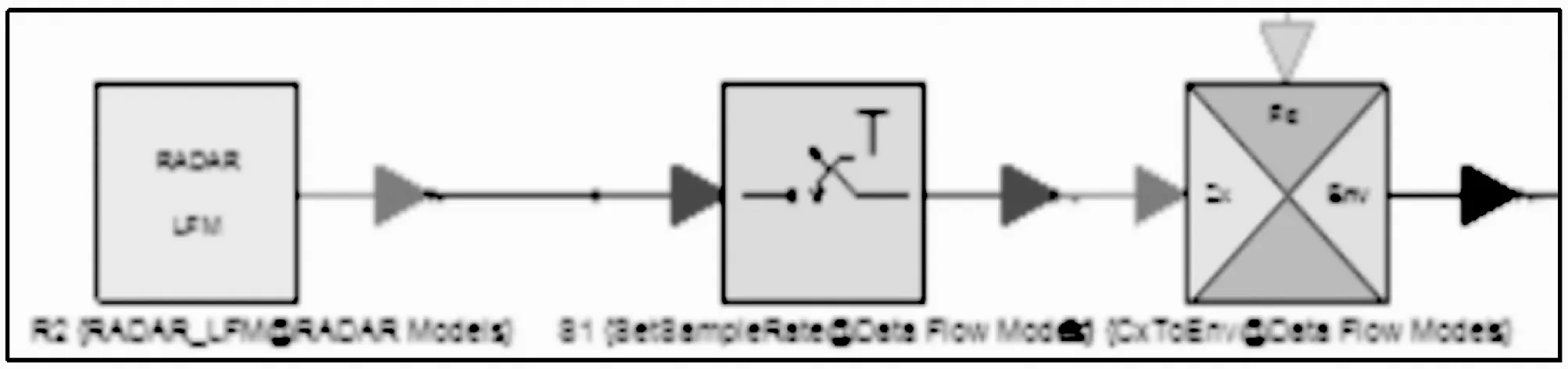
圖5 發射信號分塊
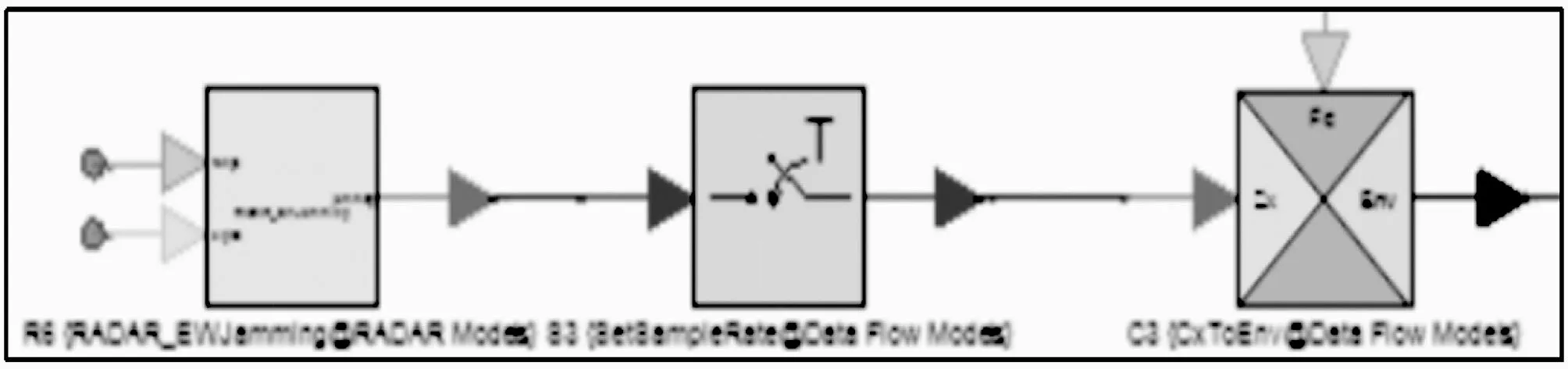
圖6 干擾分塊
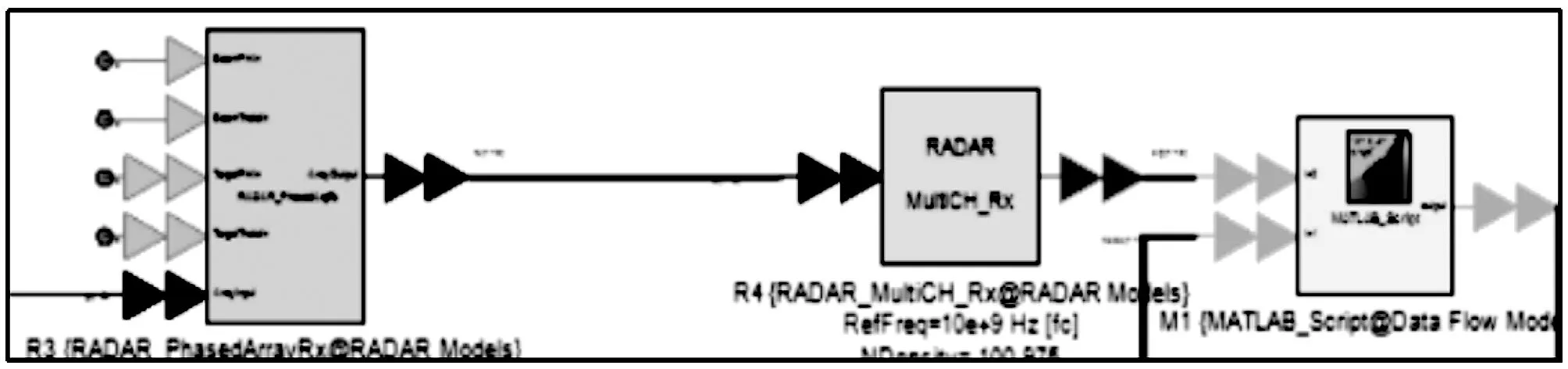
圖7 接收分塊
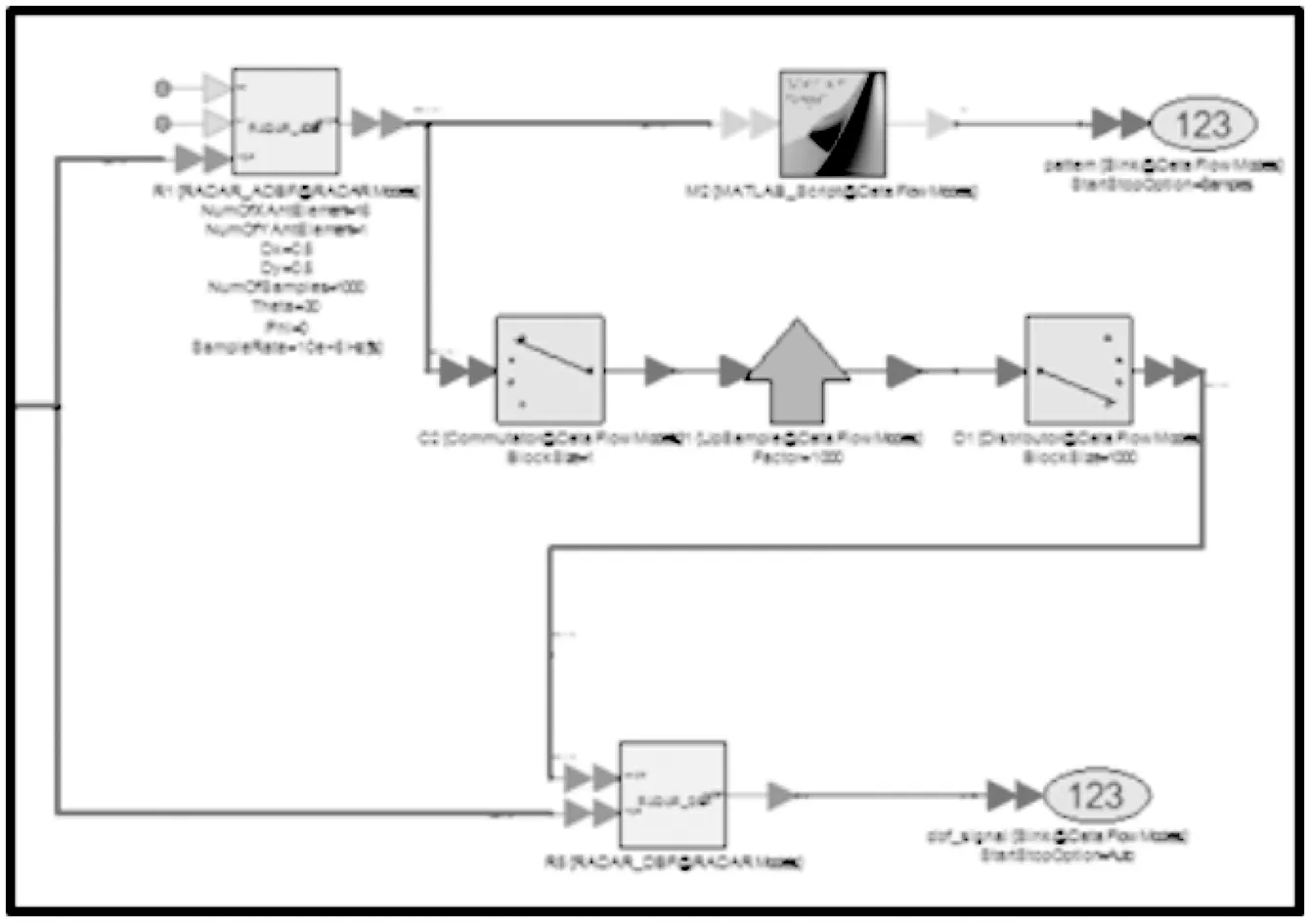
圖8 自適應數字多波束形成分塊
圖5中,Radar_LEM信號源模塊產生的線性調頻發射信號經Set_Sample_Rate采樣模塊采樣后,送入Cx_To_Env模塊進行載波調制,將轉換后的復包絡信號送入接收分塊。圖6中RADAR_EWJamming干擾模塊產生干擾信號,經Set_Sample_Rate采樣模塊采樣后,送入Cx-To-Env模塊進行載波調制,然后送入接收分塊。圖7為接收分塊,在此仿真中有兩套接收分塊分別接收發射信號和干擾信號,RADAR Phased Array Rx相控陣天線接收模塊,接收來到的發射信號(干擾信號),再將接收到的發射信號(干擾信號)送入RADAR_MultiCH_ RX多通道接收機模塊處理,自定義編程的MATLAB模塊將處理后的發射信號和干擾信號的數字基帶信號進行混合相加,然后將混合信號送入自適應數字多波束形成分塊。圖8中,RADAR-ADBF陣列最佳濾波器模塊對混合信號進行處理,通過模型內嵌的最佳權向量準則完成接收信號權系數的求取與更新,并將自適應估計權系數輸入到RADAR_DBF模塊。RADAR_DBF模塊用來完成數字基帶信號的復加權和求和運算,從而實現自適應數字多波束形成。
4 仿真結果驗證
將以上設計程序在SystemVue仿真平臺上運行,得到仿真結果如圖9~13所示。圖9為發射信號的時域仿真波形(圖(a)為多脈沖波形,圖(b)為脈沖內線性調頻信號波形),圖10干擾信號的時域仿真波形,圖11為混合信號的時域仿真波形,圖12為RADAR-ADBF模塊對混合信號處理得到的自適應估計權系數,圖13為混合信號經自適應DBF處理后的時域仿真波形(圖(a)是處理后多脈沖時域波形,圖(b)是處理后脈沖內調頻信號波形)。
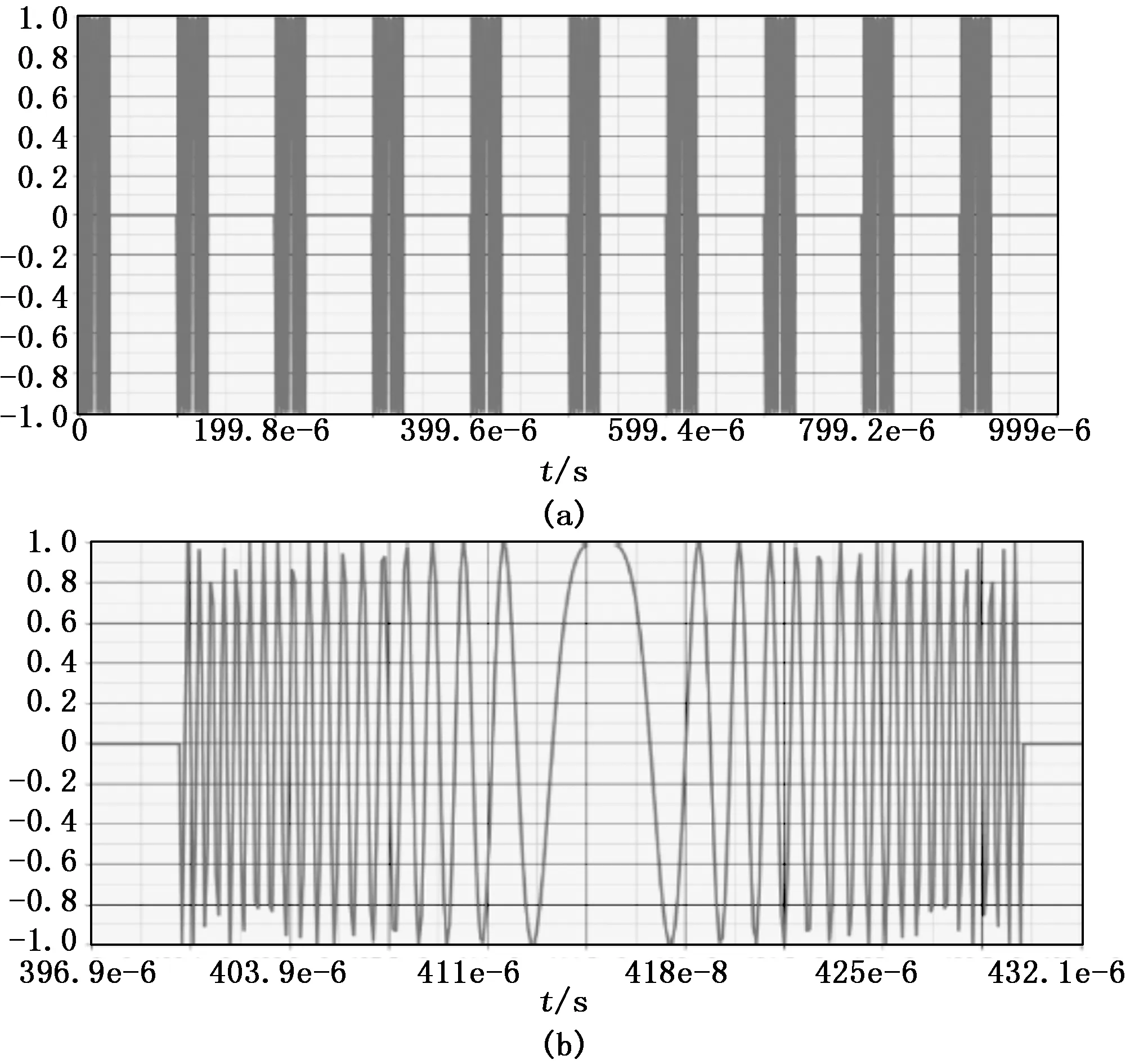
圖9 發射信號的時域仿真結果
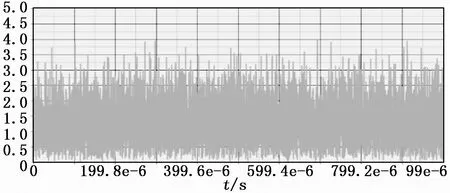
圖10 干擾信號的時域仿真結果
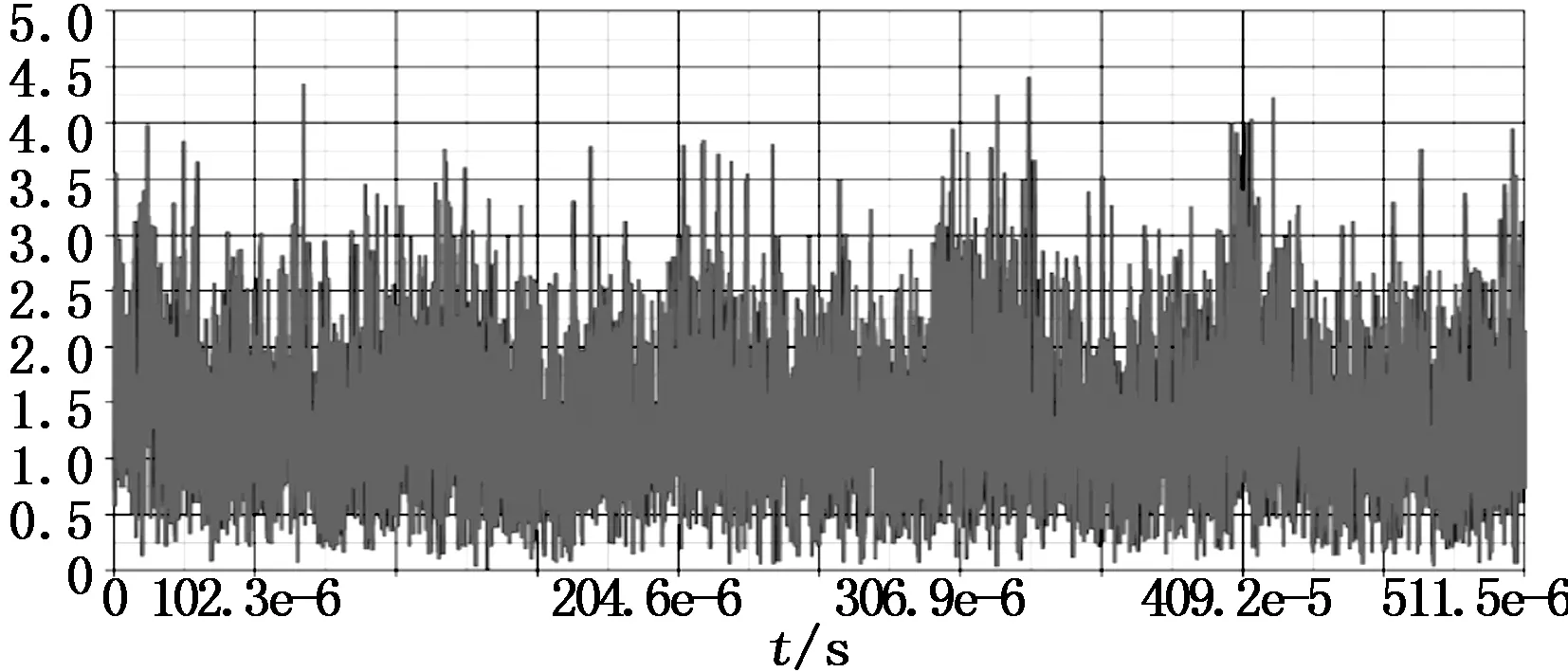
圖11 混合信號的時域仿真結果
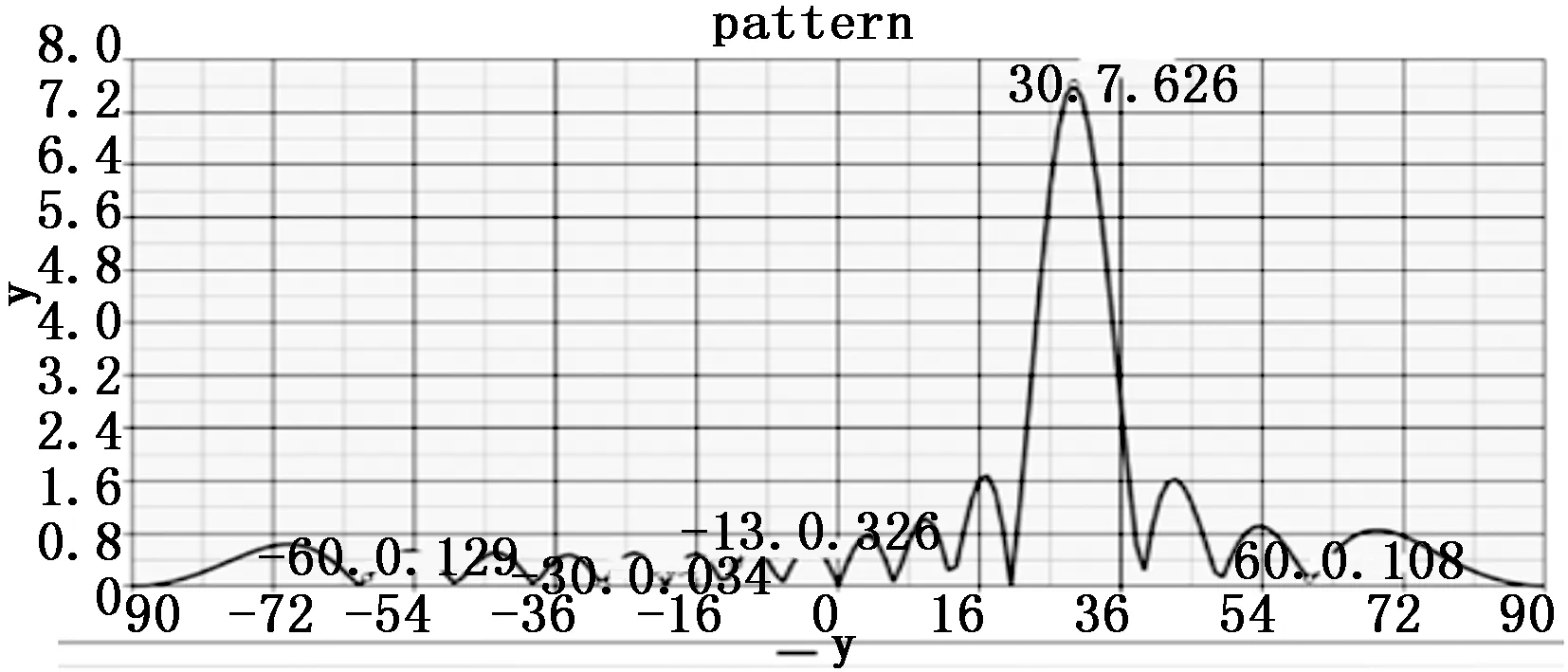
圖12 自適應估計權系數仿真仿真結果
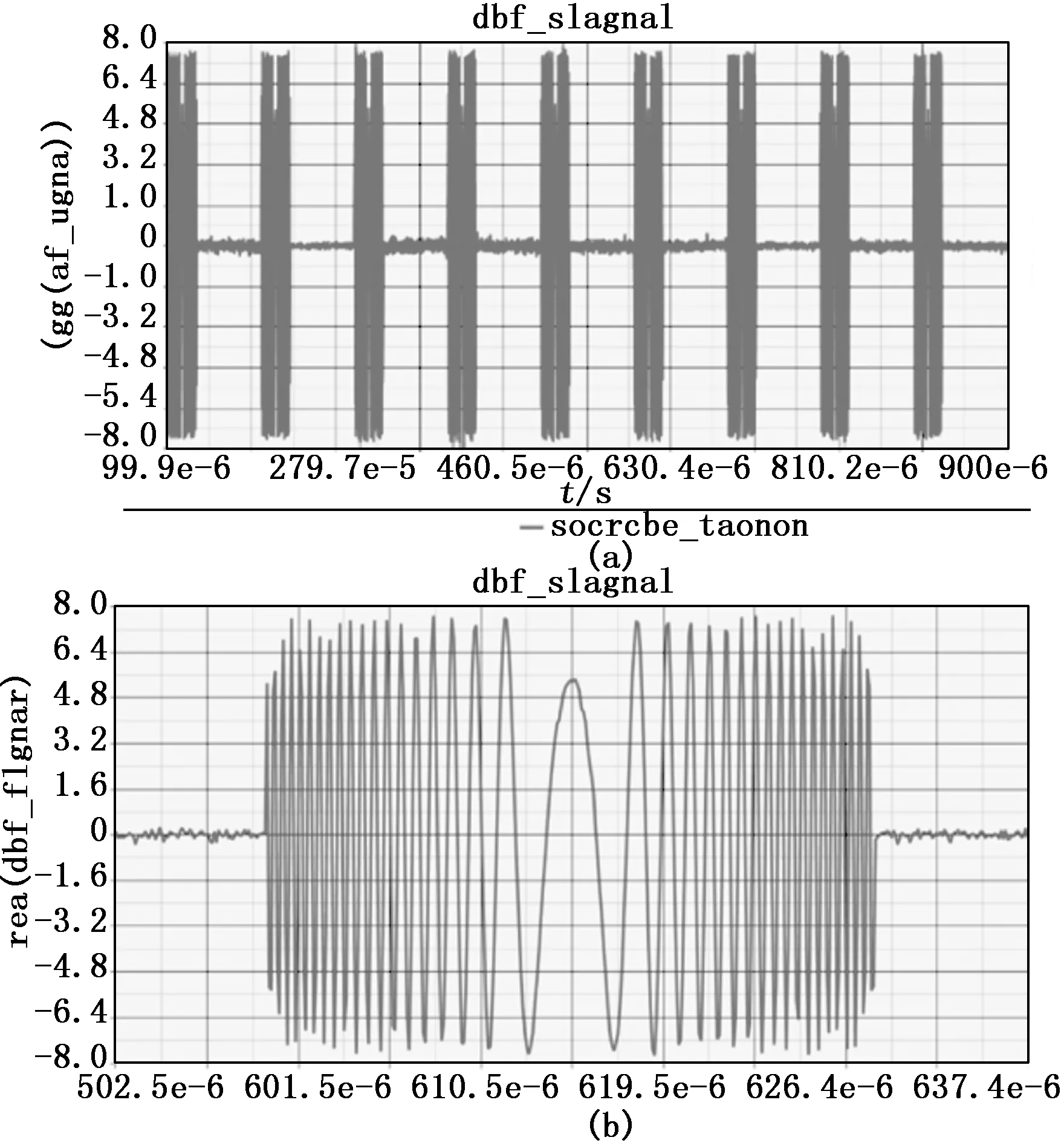
圖13 混合信號經自適應DBF處理后的時域仿真結果
由仿真結果波形(圖11)可知,發射信號和干擾信號的相互混合,發射信號淹沒在干擾中,無法進行識別。經過ADBF模塊獲取自適應權值后,可以判定發射信號的方向和干擾信號的方向。從自適應權值波形圖(圖12)得出,在雷達坐標30度方向發射信號權值最大,在雷達坐標60度方向干擾權值最小。再經過DBF模塊的數字波束形成處理后,可有效提取出發射信號波形,由圖13可以看出,其信號波形與發射前信號波形基本相同,從而驗證了設計程序和仿真結果的正確性。
5 結束語
本文主要對三坐標DBF雷達的SystemVue仿真建模方法進行研究,分析了DBF的基本理論,并對SystemVue雷達模塊庫中用于三坐標DBF雷達空域掃描仿真的陣列收發模塊、陣列信號處理模塊的功能及參數進行了研究分析,完成了DBF雷達系統的建模。在仿真驗證中,以線性調頻脈沖發射信號受到干擾的情況進行仿真,通過ADBF的自適應估計權系數,可以有效地判定干擾方向和發射信號方向,從接收陣列DBF模塊得到的波形可以看出,從混合信號中有效地識別出了發射信號波形,達到了良好的干擾抑制效果,驗證了仿真模型的正確性。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
鴨綠江(2021年35期)2021-04-19 12:24:18
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00