基于自適應律的RBF磨礦分級優化控制過程
2019-12-04 04:16:01張亞如陳志鳳蔡秀峰
數字技術與應用 2019年8期
張亞如 陳志鳳 蔡秀峰

摘要:針對磨礦過程中被控對象存在的大慣性、非線性、滯后性等特點,將球磨機簡化為一個連續控制過程。根據磨礦特性和料級顆粒分布影響,采用連續磨礦采樣數據確定的參數,提出一種基于自適應律的徑向基(Radial Basis Function,RBF)神經網絡控制系統。采用自適應律對RBF神經網絡的初始權值進行優化,采用優化后的 RBF 神經網絡辨識主控制回路被控對象。通過matlab仿真對比實驗結果,驗證了優化后的RBF網絡控制更加逼近理想狀態。
關鍵詞:磨礦過程;Matlab;神經網絡控制;自適應律
中圖分類號:TP29 文獻標識碼:A 文章編號:1007-9416(2019)08-0001-02
0 引言
作為選礦作業重要環節,其中磨礦過程中的產品目標是將大顆粒礦石磨碎到一定程度,使有用礦物與脈石分離,達到單體解離狀態以利于后續選別作業。而其中重要的就是磨礦機的磨礦濃度控制過程的指標[1-3]。磨礦分級過程是多耦合、大時滯的非線性時變控制模型[4],故本文采用具有良好逼近能力、分類能力和學習速度,逼近任意非線性函數的RBF神經網絡來實現[5][6]。本文采用自適應律來訓練RBF網絡[7][8],利用matlab仿真實現[9]。
1 工藝簡介
連續球磨過程如圖1所示,該過程主要由球磨機、旋流器、溢流泵池和進出水閥門等設備組成[1][2]。首先原礦通過皮帶運輸和前給水混合后進入磨機進行研磨,一級返砂和原礦下料的流量比被稱為返砂比。進入磨機后經一段時間研磨后溢出形成磨機排礦,混合磨機排礦水后進入旋流器。旋流器將較粗礦料以一級返砂形式返回磨機重磨,而較細礦料以一級溢流形式進入二級研磨。將磨礦濃度穩定在質量指標區間是連續磨礦過程的生產目標,而從現場能反映磨礦濃度和效率的最直接的參數就是磨礦機功率,磨機功率的大小體現著磨機濃度的變化。
2 基于自適應律的RBF神經網絡模型
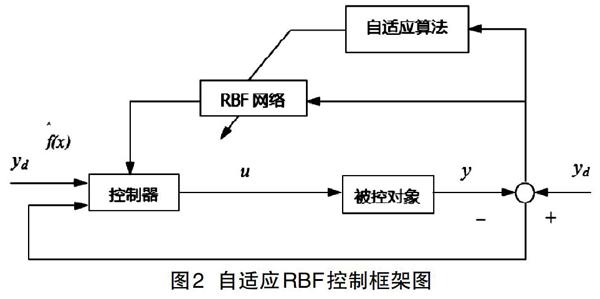
2.1 神經網絡自適應控制過程框架圖(如圖2所示)
其中RBF神經網絡構成由三層組成[1]為網絡的輸入層,為網絡的隱含層(為隱含層第j個神經元的輸出,其中,為隱含層第j個神經元高斯基函數中心點的坐標向量,………為隱含層第j個神經元高斯基函數的寬度),RBF網絡權值為…,RBF網絡輸出為。設定的磨機模型RBF神經網絡共有5個輸入,x1為球磨機的原給礦量,x2為原礦水分,x3為加水量,x4為磨音,x5為反砂比,以它們構成輸入層,高斯基函數為隱含層基函數,輸出層Y為磨礦機功率。
2.2 自適應律
采用常用的梯度下降法調整神經網絡權值容易陷入局部最優,且容易引起系統不穩定。本文采用在線自適應神經網絡控制可有效解決這個問題[10]。考慮設計理想控制律為
;? ? ? ? ? ? ? ? ? ? ? (1.1)
其中u為輸入,f為未知非線性函數,g為已知非線性函數,其中設計使得多項式的根都在左半復平面,則當,其中將 +,為網絡的逼近誤差,,采用RBF逼近未知函數f,網絡的輸入取,則RBF的輸出為;(1.2),將公式1.2帶入1.1中得到控制律:;。
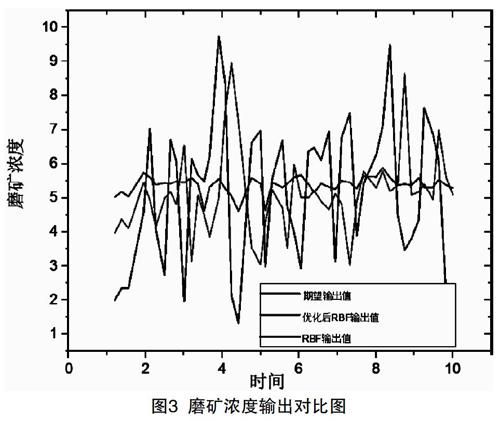
3 仿真及結果分析
通過matlab進行一般RBF網絡系統以及優化后的自適應RBF控制的實驗比較可以看出,優化后的RBF更能很好的接近理想輸出值。具體如圖3所示。
一般選礦廠的硬件控制系統以及通訊系統都可以和matlab計算軟件良好的對接,所以通過matlab仿真驗證實驗的有效性,為以后現場數據的采集和對接都提供了后備技術。
參考文獻
[1] Powell M S,MorrisonRD.The future of comminution modeling [J].International Journal of Mineral Processing,2007,84(1-4):228-239.
[2] 鐵銘,岳恒,柴天佑.磨礦分級過程的混合智能建模與仿真[J].東北大學學報,2007,28(5):609-613.
[3] Conradie,AVE,Aldrich,C.Neurocontrol of a ball mill griding circuit using evolutiongary Reinforce ment learning[J].Miner.Eng.2001,14(10):1277-1294.
[4] 尹蒂,李松仁.選礦數學模型[M].湖南長沙:中南工業大學,1993.
[5] 柴杰,江青茵,曹志凱.RBF神經網絡的函數逼近能力及其算法[J].模式識別與人工智能.2002,15(3):310-316.
[6] Behnam T,Fariba Z,Houman Z,et al.Utilization of RBF-ANN as a novel approach for estimation of asphaltene inhibition efficiency[J].Petroleum Science and Technology,2018,36(16):1216-1221.
[7] Fu X J, Wang L P. Data dimensionality reduction with application to simplifying RBF network structure and improving classication performance[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part B: Cybernetics,2003,33(3):399-409.
[8] Esposito A,Marinaro M,Oricchio D,Scarpetta S.Approximation of continuous and discontinuous mappings bya growing neural RBF-based algorithm[J].Neural Networks,2000,13(6):651-665.
[9] 劉金琨.先進PID控制MATLAB仿真[M].北京電子工業出版社,2016.
[10] Jinkun LIU,Yu Lu,Adaptive RBF Neural Network Control of Robot with Actuator Nonlinearities[J],Journal of Control Theory and Applications,2010,8(2):150-156.
Based on Adaptive of RBF Grinding Optimizing Control Process
ZHANG Ya-ru,CHEN Zhi-feng,CAI Xiu-feng
(LANGFANG NORMAL UNIVERSITY,Langfang? Hebei 065000)
Abstract:In view of the controlled object exists in the process of grinding characteristics of large inertia, nonlinear and hysteresis, the ball mill is simplified to a continuous control process.According to the characteristics of grinding and particle distribution,there is a control system of Radial Basis Function based on adaptive. Use this method to optimize the initial weights and use the optimized RBF neural network to identify the main control circuit controlled object. The optimized RBF network control is verified by MATLAB is more close to the ideal state.
Key words:Grinding Process; Matlab;The neural network;Adaptive
