基于核相關濾波器的未標記AGV目標跟蹤算法
2019-12-05 08:35:54陳應應梁鑒如
智能計算機與應用 2019年5期
陳應應 梁鑒如
摘 要:傳統的KCF跟蹤算法利用FHOG特征對目標進行描述訓練分類器從而實現預測跟蹤,當出現的光照變化、目標與背景顏色相似、目標尺寸變化等問題,易發生跟蹤結果不準確甚至目標丟失。因此,本文提出了基于Kalman濾波的KCF跟蹤算法。首先,使用HOG特征和HSV顏色特征描述要跟蹤的運動目標。其次,在跟蹤過程中,引入了自適應尺度估計的方法。最后,本文提出的改進的跟蹤算法將KCF框架與Kalman濾波器進行融合,獲取視頻第一幀目標信息后先用Kalman算法預測運動目標的位置,根據預測的目標位置對KCF算法的分類器進行訓練,再使用KCF算法得到的檢測結果更新Kalman濾波器,確定視頻序列下一幀中目標的位置。在實驗室采集的AGV數據集上對改進的算法進行了多次測試,在目標發生光照變化、快速運動、尺寸變化等復雜情況下,本文算法有較強的魯棒性。
關鍵詞: 核相關濾波;目標跟蹤;AGV;Kalman濾波;顏色特征
【Abstract】 The traditional KCF tracking algorithm uses the FHOG feature to describe the target training classifier to achieve predictive tracking. When the illumination changes, the target and background colors are similar, and the target size changes, the tracking result is inaccurate or even the target is lost. Therefore, this paper proposes a KCF tracking algorithm based on Kalman filtering. First, the paper uses the HOG feature and the HSV color feature to describe the target to be tracked. Secondly, this paper uses an adaptive scale estimation method. Finally, the algorithm proposed in this paper fuses the KCF framework with the Kalman algorithm. After obtaining the first frame of the video, the Kalman algorithm is used to predict the position of the moving target, and the KCF algorithm is trained according to the predicted target position. Based on the above, using the detection result obtained by the KCF algorithm, the Kalman filter is updated to determine the position of the target in the next frame of the video sequence. The improved algorithm has been tested several times on the AGV dataset collected in the laboratory. The algorithm has strong robustness in the following situations as illumination changes, fast motion, and dimensional changes.
【Key words】 ?kernelized correlation filter; target tracking; AGV; Kalman filter; color feature
0 引 言
視頻目標跟蹤是計算機視覺與圖像處理研究中的難點和熱點[1],在日常生活、科學研究和工業生產等許多領域有著廣泛的應用。動態目標跟蹤就是在圖像序列中選擇動態障礙物目標,并在多個連續圖像幀中主動搜索和跟蹤目標,得到其具體狀態、位置以及運行軌跡[2]。由于外界環境的復雜和運動目標的多變,傳統單一的跟蹤算法不能達到很好的跟蹤結果,在動態目標的跟蹤方面仍然存在很多問題。
目前,目標跟蹤算法大致分為兩大類[3]:生成(generative)模型方法[4-5]和判別(discriminative)模型方法[6-7]。在生成模型方法中,均值漂移[8]算法是一種用概率密度函數的梯度來預測估計目標下一時刻位置的方法,Comaniciu等人[9]則首次將該算法應用在目標跟蹤的場景中。Kalman預測器是一種在誤差協方差最小準則下的最優化自回歸數據估計方法,該算法計算量小,實時性高[10]。1998年,Isard等人[11]首次提出將粒子濾波算法引入目標跟蹤,粒子濾波算法在非線性、非高斯模型中有很好的魯棒性。近年來,判別式學習跟蹤算法因為其具有高效性的優點變得流行起來。Blome等人[12]提出了一種最小輸出平方誤差和濾波器[13],該算法將計算變換到頻域空間,提高了算法的運行速度。Henriques等人[14]提出核相關濾波器(KCF)跟蹤算法,該算法用方向梯度直方圖(HOG)特征描述跟蹤目標,改進的算法具有較高的魯棒性。
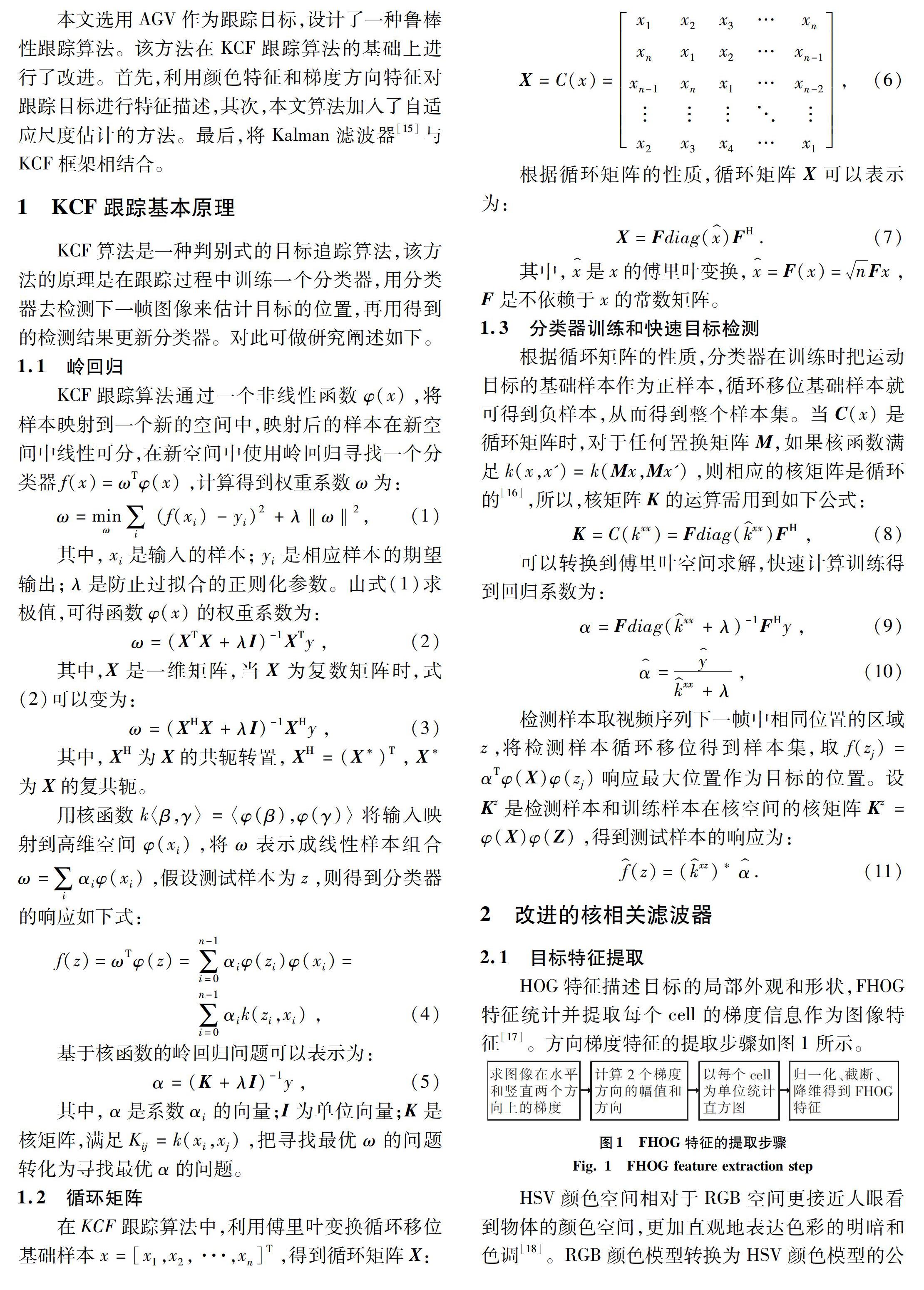
本文選用AGV作為跟蹤目標,設計了一種魯棒性跟蹤算法。該方法在KCF跟蹤算法的基礎上進行了改進。首先,利用顏色特征和梯度方向特征對跟蹤目標進行特征描述,其次,本文算法加入了自適應尺度估計的方法。最后,將Kalman濾波器[15]與KCF框架相結合。
[5]WANG Lingfeng, YAN Hongping, WU Huaiyu, et al. Forward-backward meanshift for visual tracking with local-background-weighted histogram[J]. IEEE Transactions on lntelligent Transportation Systems, ITS, 2013, 14 (3):1480-489.
[6]ZHANG K, ZHANG L, YANG M H. Real-time compressive tracking[C]//European Conference On Computer Vision, ECCV.Berlin:Springer-Verlag, 2012:864-877.
[7]王飛,房勝.加權局部特征結合判別式字典的目標跟蹤[J].中國圖象圖形學報,2014,19(9):1316-1323.
[8]FUKUNAGA K,HOSTETLER LD. The estimation of the gradient of a density function,with application in pattern recognition[J].IEEE Transactions on Information Theory,1975,21 (1):32-40.
[9]COMANICIU D, RAMESH V,MEER P. Kernel-based object tracking[J].IEEE Transactions on Pattern Analysis and Machine lntelligence, 2003,25 (5):564-577.
[10]楊明雪,張穎,牛安東,等.基于CamShift與Kalman算法的抗遮擋目標跟蹤方法研究[J].電腦知識與技術,2017,13(9):173-174.
[11]ISARD M, BLAKE A. Condensation-conditional density propagation for visual tracking[J].International Journal of Computer Vision, 1998,29(1):5-28.
[12]BOLME D S, BEVERIDGE J R, DRAPER B A, et al. Visual object tracking using adaptive correlation filters [C]//IEEE Conference on Computer Vision and Pattern Recognition, CVPR. San Francisco, California:IEEE, 2010:2544-2550.
[13]田亞蕾,馬杰,楊楠.結合核相關濾波和Kalman預測的運動目標跟蹤[J].小型微型計算機系統,2018,39(10):2330-2334.
[14]HENRIQUES J F, RUI C, MARTINS P, et al. High-speed tracking with kernelized correlation filters[J]. IEEE Transactions on Pattern Analysis & Machine lntelligence, PAMI, 2015, 37(3):583-596.
[15]龍濤.基于Kalman預測器改進的CamShift目標跟蹤[D].湘潭:湘潭大學,2016.
[16]喬金濤. 動態背景下移動機器人的運動檢測與跟蹤[D]. 秦皇島:燕山大學,2017.
[17]郭克友,暴啟超.改進的核相關濾波器的目標跟蹤算法[J].計算機工程與設計,2018,39(3):769-773,797.
[18]梁晶. 基于顏色特征的圖像檢索技術研究[D].廈門:廈門大學,2009.
[19]張雷,王延杰,孫宏海,等.采用核相關濾波器的自適應尺度目標跟蹤[J].光學精密工程,2016,24(2):448-459.
