小型無人機集群作戰的關鍵技術分析
2019-12-05 08:40:44范彬楊書奎
無線互聯科技 2019年17期
關鍵詞:發展現狀
范彬 楊書奎
摘 ? 要:小型無人機集群作戰一直被視為無人化作戰的突破口。通過大規模配置低成本的小規模作戰平臺,能夠實現更高的作戰效率。文章簡要描述小型無人機集群作戰概念及其優勢,并分析實現小型無人機集群在戰場中應用所需要的關鍵技術。
關鍵詞:小型無人機集群;發展現狀;集群優勢;關鍵技術
無人機(Unmanned Aerial Vehicle,UAV)是一類支持無人駕駛、能夠自動或者自主控制飛行的空中平臺,可代替人執行危險、枯燥的任務[1]。無人機作戰的思想在很早以前就已經有人提出并進行應用,從美國內戰使用的高空氣球觀測技術,到阿富汗模式,早已將無人機運用于戰場中。由于航空電子工業的大力發展,現在的無人機相比之前具有更好的續航能力、通信能力以及機動能力,具備了在復雜環境中執行多種危險任務的能力,例如,攻擊敵方彈藥庫,執行情報—監視—偵察(Intelligence-Surveillance-Reconnaissance,ISR)任務[2],以及執行電子干擾,由于具有零人員傷亡的特點。無人機在未來戰場中的應用具有廣闊的前景。
現在應用于戰場環境中的無人機大多具有成本高、體型大的特點,有限的預算環境將限制更多大型無人機的應用。同時,防空系統的迅速發展,大型無人機更易被發現,因此,大型無人機雖然配備復雜的機上系統,但是存活率低。小型無人機也早已運用于戰術環境當中,但是只被作為偽裝目標吸引敵方防空系統或者滲透敵方防空系統,來達到保護主要作戰平臺的目的。例如,早在20世紀50年代,ADM-20鵪鶉無人機就是為美國空軍B-52戰略轟炸機研制的電子對抗誘惑導彈,主要用于在敵方雷達作用范圍內,按預定的航線輔助B-52轟炸機實施突防。
隨著新興技術諸如人工智能、微電子產業、組網技術、平臺小型化技術的快速發展,小型無人機集群作戰概念逐步被提出。通過大大增加集群中無人機的數量,協同有人作戰單元,能夠完成復雜的作戰任務。小型無人機集群作戰具有成本低、作戰效率高、存活率高的特點,一直被視為無人化作戰的突破口。通過與陸、海、空有人作戰平臺結合,小型無人機集群可以實現多個領域的集群作戰。因此,小型無人機集群作戰將是未來戰場不可缺少的單元。
1 ? ?小型無人機集群作戰簡介
集群是指具有共同目標的群體為實現某種目標時而產生的協調行為,群體中的個體遵循簡單的運動和邏輯規則,不受任何中心的控制,而群體卻能體現出宏觀智能行為。
小型無人機集群的靈感來源于生物當中的集群現象,大量攜帶不同任務載荷的小規模作戰平臺,通過個體之間的分工合作、相互協調,可以完成復雜作戰任務。目前,小型無人機集群主要被用來執行電子干擾任務。在電子干擾方面,雖然大的空中平臺相比小型空中平臺,可以攜帶更高功率的干擾載荷,但是也更加容易被敵方雷達監測到。小型無人機不容易受到威脅,因此,可以更加靠近敵方的雷達。集群中每架無人機裝載電磁能或定向能武器等干擾載荷[3],通過合理分工,相互協調,可以比單架大型無人機更加高效地對敵方目標實施電子干擾。
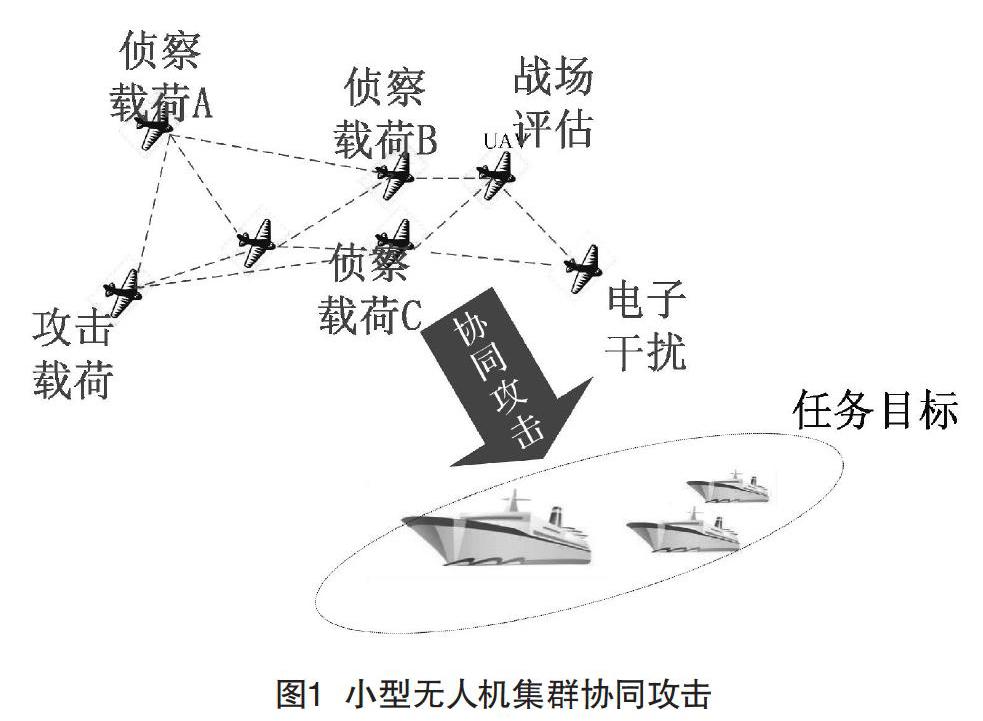
隨著小型化平臺的發展,在未來的戰場中,小型無人機集群有可能會實現更加復雜的戰場任務。圖1展示了未來戰場中小型無人機集群系統作戰的場景,集群當中包含攜帶偵察監視、電子干擾、打擊與評估的無人機,當裝載不同偵察載荷的無人機協同完成目標定位時,方便通知附近處于最佳位置且攜帶攻擊載荷的無人機完成打擊任務,之后攜帶相應載荷的無人機可以完成戰場評估,決定是否執行二次打擊任務。
2 ? ?小型無人機集群作戰發展現狀
隨著技術的發展,無人機小型化已經逐漸趨向成熟。目前,美國已成功采用3D打印技術制造Perdix固定翼無人機。單機技術的可實現性,使得各國積極研究小型無人機集群技術。
美國率先推出多個低成本無人機集群研究項目,主要有DARPA小精靈項目、美國海軍低成本無人機集群技術以及空軍項目[4-5]。2016年5月,美國空軍正式提出《2016—2036年小型無人機系統飛行規劃》[6]。
近年來,國內外對小型無人機集群進行了多次驗證、測試,試驗規模逐漸擴大:2015年美國海軍研究生院實現了一人控制50架“西風”(Zephyr)無人機的試驗;2016年,在珠海航展上,中國電科CETC披露了我國第一個固定翼無人機集群試驗原型系統,實現了67架規模的集群原理驗證;2017年,美國公開了103架“灰山鶉”(Perdix)無人機的試驗;之后,中國電科再次公開了119架無人機集群的試驗。
3 ? ?小型無人機集群作戰的優勢
3.1 ?作戰效率高
小型無人機集群作戰相比于單架大型無人機具有作戰效率高的優點。根據Lanchester平方率,作戰單元數量是比單元作戰能力更重要的戰爭勝負決定因素,無人機集群能夠實現對敵優勢戰機更大的勝率。將原本造價高昂的多任務系統分解為若干低成本的小規模作戰平臺,可以比單架大型系統更有效挫敗對手,同時,對于同一個任務,集群無人機協同完成所需的時間將遠小于單個完備作戰平臺所需要的時間。
3.2 ?任務完成率高
具有“無中心”和“自主協同”的無人機集群中的個體并不依賴于某個實際存在的、特定的節點來運行。如果集群中的一架無人機離開集群或被擊落,那么剩下的無人機仍然可以完成任務。對于單架無人機而言,無人機被擊落則意味著任務的失敗。同時,由于小型無人機具有體型小、速度快的特點,相比于大型無人機受敵方防空系統的威脅更小。
3.3 ?作戰成本低
功能單一的小型無人機平臺成本較低,即使1 000架小型無人機的價格也遠遠小于一架大型無人機的成本。同時,擊落一架小型無人機所需的成本遠遠大于小型無人機本身的價格。因此,在戰爭預算有限的情況下,小型無人機具有更低的作戰成本。
4 ? ?集群作戰的關鍵技術
生物中的群體通過信息素及相應的協調行為來實現共識主動性,進而體現出集群行為。對于小型無人機構成的群體,需要采用一定的技術來實現集群行為。
4.1 ?避撞技術
一個成功的無人機集群必須能夠在不和集群當中其他無人機碰撞的前提下飛行,可以說,避撞技術是無人機作戰應用的基礎。目前,避撞技術主要采用傳感器和交互輔助信息的方式。
當集群的協同較好時,可以使用傳感器避撞技術,通過傳感器構建“視線系統”,并采用一定的路徑規劃原則與相鄰的無人機保持一定的相對位置,這種路徑規劃原則可以是:(1)沿著與鄰居相同的方向移動。(2)個體保持靠近鄰居。(3)個體避免與鄰居碰撞。
使用交互輔助信息的方式是一種補充的避撞技術。在集群中,節點通過生成包含無人機速度、方向、位置、加速度等信息的報文,并使用相應的物理層及鏈路層技術,將報文分發給一跳范圍內的其他節點,收到報文的節點及時更新與安全飛行相關的信息,并根據信息內容決定是否需要規劃新的路徑以防止碰撞。
4.2 ?協同技術
協同技術是一個比較大的概念,它既涉及上層的算法,諸如分布式決策算法、任務分配算法、分布式融合算法等,又包括底層的信息交互技術。協同技術可以幫助無人機集群實現分工合作、相互協調、高效執行戰術環境下的多種任務。
由于小型無人機集群當中功能分布化的特點,每架無人機攜帶不同的任務載荷,因此,完成一個復雜的任務需要多架無人機之間的協同合作。當面臨復雜任務和需要協作的任務時,當前無人機可以把任務信息和資源需求發布到由各無人機組成的集群網絡上,各無人機可以根據當前自身任務和資源情況予以響應。例如,攜帶A類偵察載荷的無人機發現可疑任務目標時,可以發送信息尋求附近的裝載其他類型偵察載荷的無人機參與對可疑目標的協同確認。
為了使所交互的信息及時、完整地進行傳輸,對于通信網絡性能有一定的要求。因此,在一定的空間分布下,為了實現高速飛行的多個無人機之間有效的協同,提高通信質量也是集群的關鍵技術。
4.3 ?數據安全技術
集群中的安全問題應該和集群其他關鍵技術同時考慮,而不應該在集群發展到一定程度之后再去實現安全目標。數據安全技術應該融入集群關鍵技術的各個環節,同時,應該考慮到集群所能出現的各種情況。例如,考慮如下場景:小型無人機集群用于作戰時,發生集群中的某架無人機被捕獲,如果沒有良好的安全措施,就會導致敏感數據和信息的泄露,不利于集群系統的生存。可見,實現集群當中的數據安全技術將是集群當中必須考慮的關鍵技術。
5 ? ?結語
小型無人機集群作為一種顛覆性技術,具有作戰效率高、任務完成率高、成本低的優勢,將會成為未來戰場的突破口。小型無人機集群的實現,不僅需要人工智能、微電子產業等新興技術的支撐,同時,需要基于集群研究其中的關鍵技術。小型無人機集群中各種技術的研究仍處于起步階段,實現小型無人機集群在作戰中的應用仍然有很長的路要走。
[參考文獻]
[1]牛軼峰,肖湘江,柯冠巖.無人機集群作戰概念及關鍵技術分析[J].國防科技,2013(5):37-43.
[2]CEVIK P,KOCAMAN I,AKGUL A S,et al.The small and silent force multiplier:a swarm uav—electronic attack[J].Journal of Intelligent&Robotic Systems,2013(1):595-608.
[3]劉麗,汪濤.無人機集群協同電子攻擊的作戰優勢及挑戰[J].國防科技,2016(6):126-130.
[4]宋怡然,申超,李東兵.美國分布式低成本無人機集群研究進展[J].飛航導彈,2016(8):17-22.
[5]佚名.美國防部秘密開發下一代集群無人機技術[J].現代軍事,2016(10):15.
[6]楊王詩劍.引領海戰革命—淺析無人機“蜂群戰術”[J].兵器知識,2016(3):60-63.
猜你喜歡
現代經濟信息(2016年19期)2016-10-20 19:05:57
中國科技博覽(2016年19期)2016-10-19 13:51:05
中國科技博覽(2016年19期)2016-10-19 13:29:00
中國科技博覽(2016年18期)2016-10-19 11:35:03
中國科技博覽(2016年18期)2016-10-19 09:20:36
中國市場(2016年36期)2016-10-19 04:06:52
中國市場(2016年33期)2016-10-18 13:06:04
科技視界(2016年21期)2016-10-17 18:44:27
現代園藝(2016年17期)2016-10-17 07:24:22
科學與財富(2016年28期)2016-10-14 18:40:58
