國外三種典型垃圾轉(zhuǎn)運車機械臂上料機構(gòu)技術(shù)分析
2019-12-07 02:09:38合加新能源汽車有限公司
專用汽車 2019年11期
關(guān)鍵詞:機械
合加新能源汽車有限公司 謝 勇
神龍汽車有限公司 王亞蓮
通過對國外三種典型的垃圾轉(zhuǎn)運車機械臂上料機構(gòu)進行結(jié)構(gòu)、運動過程、參數(shù)特點等方面的分析,進一步總結(jié)出三種機械臂上料機構(gòu)在性能上的優(yōu)缺點,為適合國內(nèi)垃圾收運特點的機械臂的研發(fā)提供了參考。
國內(nèi)外越來越多的地區(qū)(包括農(nóng)村地區(qū))正采用垃圾桶裝載作為最為主流的垃圾裝載方式, 通常采用120L/240L 塑料垃圾桶裝載生活垃圾,此方式具有垃圾桶放置方便、方便移動、 質(zhì)量輕、 成本低等幾大優(yōu)點。當(dāng)使用垃圾車對垃圾桶內(nèi)垃圾轉(zhuǎn)運時,需要采用機械化的上料機構(gòu)將垃圾桶內(nèi)的垃圾倒入垃圾箱中。
目前國內(nèi)的垃圾車具有各種各樣的后裝、側(cè)裝機構(gòu),但這些機構(gòu)都需要先將垃圾桶掛到機構(gòu)上,然后才能進行裝載, 環(huán)衛(wèi)工人的勞動強度較大。國外很多廠家已經(jīng)開發(fā)出多種專用機械臂上料機構(gòu),環(huán)衛(wèi)工人無需下車即可完成垃圾桶上料工作。本文將對國外三種典型的機械臂上料機構(gòu)進行論述。
Heil 公司 DURAPACK? PYTHON?型機械臂
1.組成結(jié)構(gòu)分析
Heil 公司 DURAPACK? PYTHON?型機械臂由抱桶手爪、舉升臂、伸展臂、伸展油缸、舉升油缸、抱桶油缸、基座、液壓控制系統(tǒng)、電氣控制系統(tǒng)、軟件操作系統(tǒng)等幾大部分構(gòu)成,如圖1所示。主要參數(shù)如表1所示。
2.運動過程分析
2.1 機械臂抓桶過程
伸展油缸伸出時帶動伸展臂展開,抱桶手爪遠離車箱的同時向下運動;舉升油缸輔助部分收回帶動舉升臂展開,抱桶手爪遠離車箱的同時向上運動;抱桶手爪到達垃圾桶位置,抱桶油缸伸出帶動抱桶手抓抓住垃圾桶。機械臂抓桶伸展如圖2所示。

圖1 DURAPACK? PYTHON?型機械臂
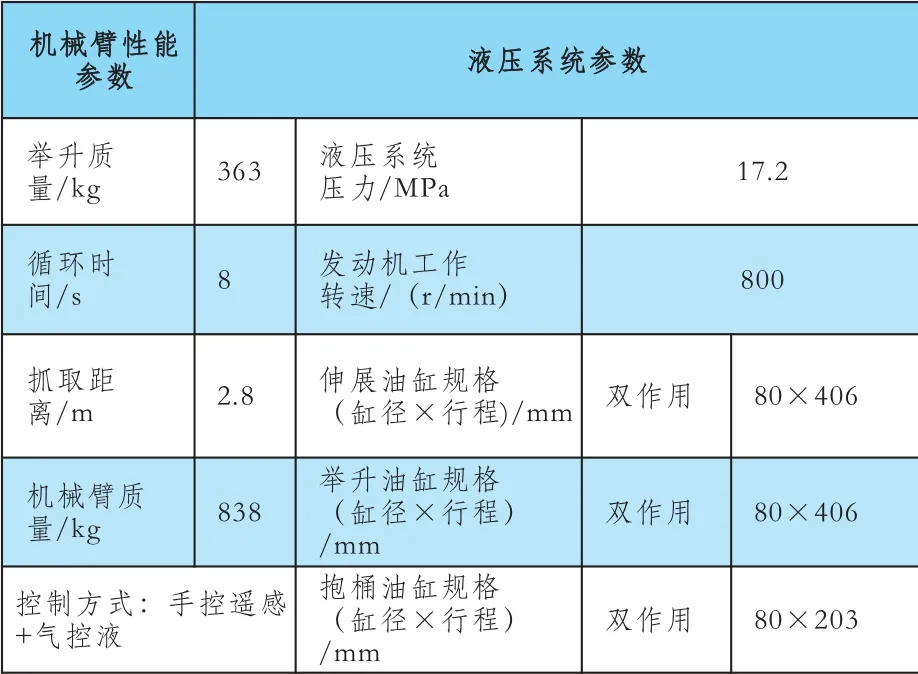
表1 DURAPACK? PYTHON?型機械臂主要參數(shù)
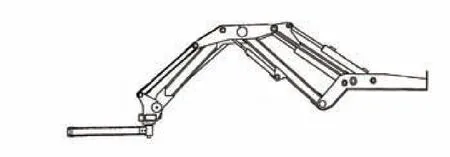
圖2 機械臂抓桶伸展
2.2 機械臂提桶卸料過程
伸展油缸縮回時帶動伸展臂折疊收回,抱桶手爪靠近車箱同時向上運動;舉升油缸完全收回,帶動舉升臂完全展開,抱桶手爪同時向上運動,同時帶動垃圾桶傾翻,垃圾桶垃圾倒入垃圾箱中。
2.3 機械臂放桶過程
舉升油缸部分伸出帶動垃圾桶翻轉(zhuǎn)回位,伸展油缸伸出時帶動伸展臂展開,抱桶手爪遠離車箱同時向下運動,抱桶手抓到達垃圾桶放置位置;抱桶油缸縮回帶動抱桶手爪松開垃圾桶。 機械臂提桶卸料示意圖如圖3所示。
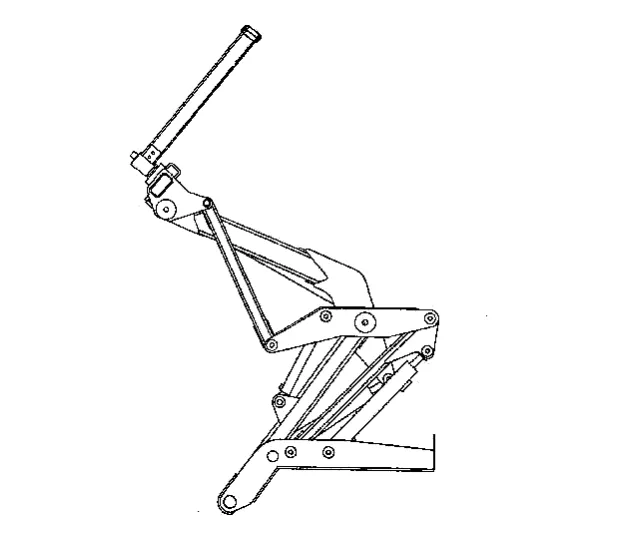
圖3 機械臂提桶卸料
2.4 機械臂收回原點位置
伸展油缸縮回時帶動伸展臂折疊收回,同時舉升油缸完全伸出帶動舉升臂完全展開, 機械臂收回原點位置。機械臂原點位置如圖4所示。
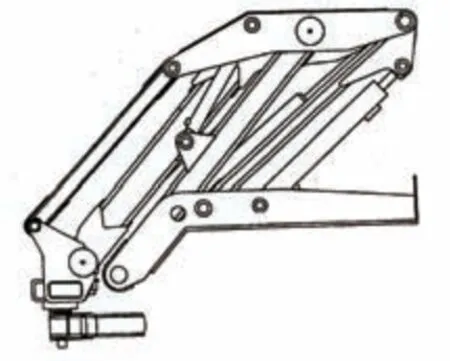
圖4 機械臂原點位置
3.機械臂操控系統(tǒng)
DURAPACK? PYTHON?型機械臂操控起來僅僅通過一個操作手柄+兩個按鈕即可完成機械臂的舉升-放下、展開-收回、抓取-松開、機械臂回初始原位等各項操作。機械臂操控手柄如圖5所示。

圖5 機械臂操控手柄
4.性能分析
DURAPACK? PYTHON?型機械臂操控時僅通過一個操作手柄+兩個按鈕即可完成機械臂的舉升-放下、展開-收回、抓取-松開、機械臂回初始原位等各項操作。
4.1 性能優(yōu)勢
DURAPACK? PYTHON?型機械臂在收縮回初始位置的時候,伸展臂和舉升臂是折疊起來的,所以占用空間比較小。同時機械臂完全展開時的整體長度包括了舉升臂和伸展臂兩段長度,機械臂展開長度比較長,同樣的道理其舉升的高度也更高。通過前面的運動分析看出機械臂的幾個油缸可以同時聯(lián)動,所以其運動循環(huán)時間僅需8s。
4.2 性能劣勢
通過對DURAPACK? PYTHON?型機械臂的運動分析可以看出,在機械臂抓桶過程中,不僅伸展油缸伸出時帶動伸展臂展開,舉升油缸同時需要輔助部分收回帶動舉升臂展開;放桶時,伸展油缸伸出時帶動伸展臂展開,舉升油缸同時需要輔助部分伸出,帶動垃圾桶翻轉(zhuǎn)回位以及舉升臂適當(dāng)收回;抓桶和放桶的過程需要伸展油缸和舉升油缸緊密配合聯(lián)動,抱桶手爪的運動軌跡呈現(xiàn)為曲線運動,而且根據(jù)垃圾桶位置的不一致,抓桶和放桶過程機械臂的運動軌跡是不一致的,這就導(dǎo)致機械臂的運動控制變得復(fù)雜,人工操控機械臂難度增加, 如果機械臂控制系統(tǒng)設(shè)計不好,機械臂運動的過程會存在抖動、卡滯的問題隱患。

圖6 Ranger 型機械臂
Bridgeprot 公司 Ranger 型機械臂
1.組成結(jié)構(gòu)分析
Bridgeprot 公司 Ranger 型機械臂由抱桶手爪、舉升臂、伸展臂、舉升油缸、 翻轉(zhuǎn)油缸、 伸展油缸、 抱桶油缸、基座、液壓控制系統(tǒng)、電氣控制系統(tǒng)、 軟件操作系統(tǒng)等幾大部分構(gòu)成,如圖6所示。主要參數(shù)如表2所示。
2.運動過程分析
2.1 機械臂抓桶過程
伸展油缸伸出帶動伸展臂展開,抱桶手爪遠離車箱運動,抱桶手爪到達垃圾桶位置,抱桶油缸伸出帶動抱桶手爪抓住垃圾桶。
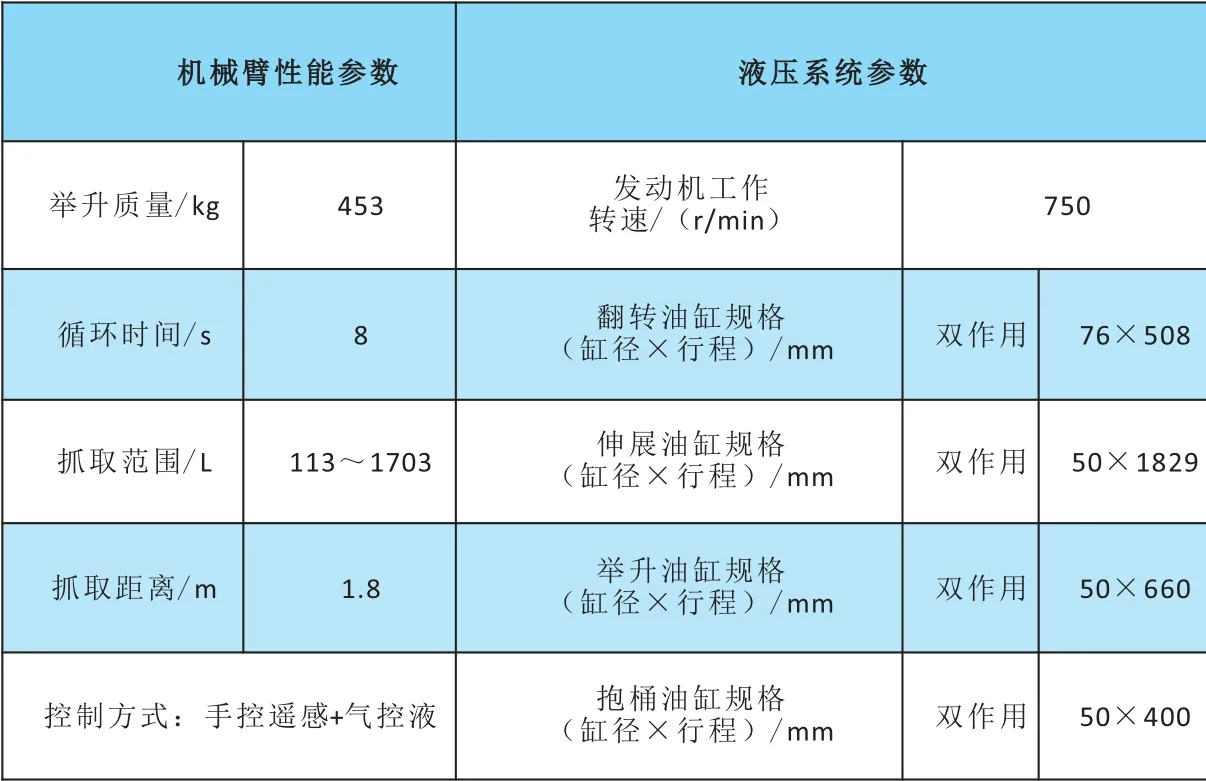
表2 Ranger 型機械臂主要參數(shù)
2.2 機械臂提桶卸料過程
伸展油缸縮回時帶動伸展臂收回,抱桶手爪靠近車箱;舉升油缸收回帶動抱桶手爪向上運動,翻轉(zhuǎn)油缸縮回帶動垃圾桶傾翻,垃圾桶垃圾倒入垃圾箱中。
2.3 機械臂放桶過程
翻轉(zhuǎn)油缸伸出帶動垃圾桶翻轉(zhuǎn)回位,舉升油缸伸出帶動抱桶手爪向下運動,伸展油缸伸出時帶動抱桶手爪遠離車箱,抱桶手爪到達垃圾桶放置位置,抱桶油缸縮回帶動抱桶手爪松開垃圾桶。
2.4 機械臂收回原點位置
伸展油缸縮回時帶動伸展臂收回,機械臂收回原點位置。
3.性能分析
3.1 性能優(yōu)勢
DURAPACK? PYTHON?型機械臂伸展臂的伸展-縮回,舉升臂的上升-下降為簡單的直線運動,并可以通過單一油缸的運動得以實現(xiàn)。整個運動過程控制比較簡單,運動平穩(wěn)性較好,駕駛員也更容易操作。
3.2 性能劣勢
DURAPACK? PYTHON?型機械臂安裝時占用空間較大,機械臂展開后臂長較短,同時機械臂上料高度較矮,需要在垃圾箱側(cè)面設(shè)計一個專門的進料口。
McNeilus 公司 Zero-Radius 型機械臂
1. 組成結(jié)構(gòu)分析
McNeilus 公司 Zero-Radius 型機械臂由抱桶手爪、伸展臂、提升導(dǎo)軌、液壓馬達、伸展油缸、基座、液壓控制系統(tǒng)、電氣控制系統(tǒng)、軟件操作系統(tǒng)等幾大部分構(gòu)成。如圖7所示。主要參數(shù)如表3所示。
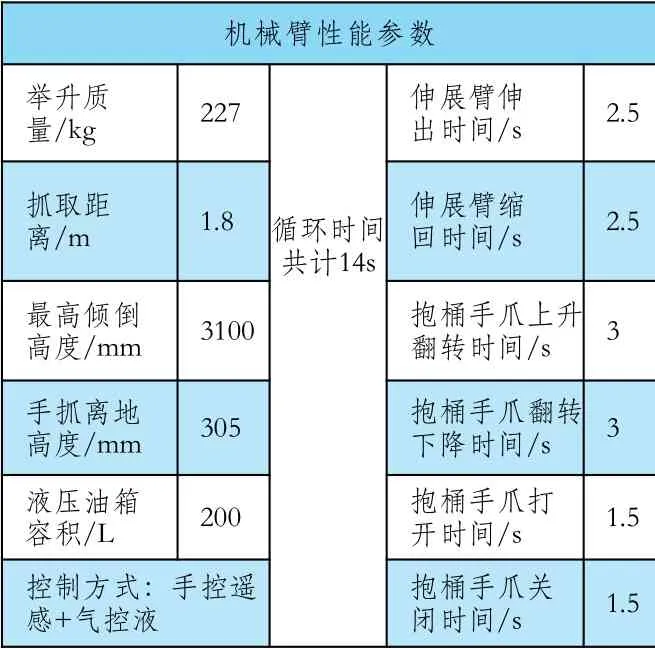
表3 Zero-Radius 型機械臂主要參數(shù)
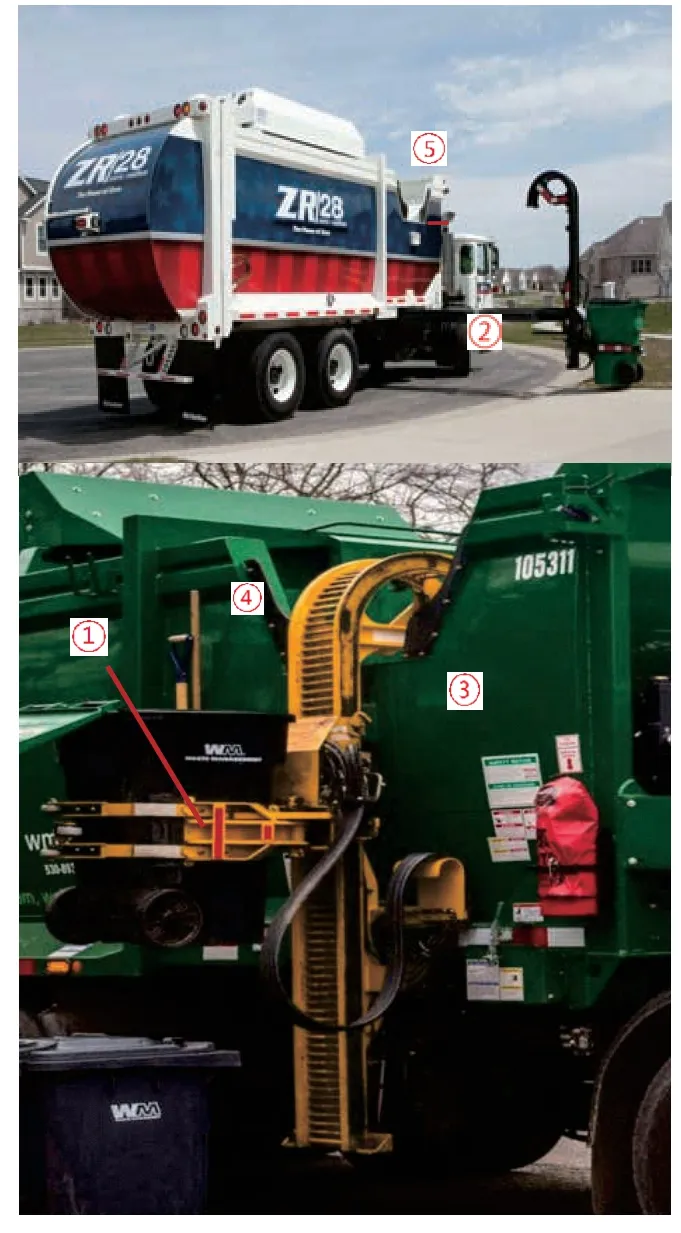
圖7 Zero-Radius 型機械臂
2. 運動過程分析
2.1 機械臂抓桶過程
伸展油缸伸出帶動伸展臂展開,抱桶手爪(包括導(dǎo)軌)遠離車體運動,抱桶手爪到達垃圾桶位置, 抱桶油缸伸出帶動抱桶手爪抓住垃圾桶。機械臂伸出抓桶如圖8所示。
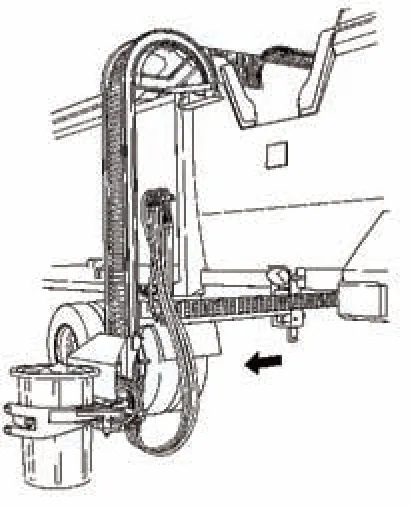
圖8 機械臂伸出抓桶
2.2 機械臂提桶卸料過程
伸展油缸縮回時帶動伸展臂收回,抱桶手爪(包括導(dǎo)軌)靠近車體;液壓馬達帶動抱桶手爪沿著軌道運動,抱桶手爪帶著垃圾桶沿著導(dǎo)軌向上運動并傾翻,垃圾桶垃圾倒入垃圾箱中。機械臂提桶卸料如圖9所示。
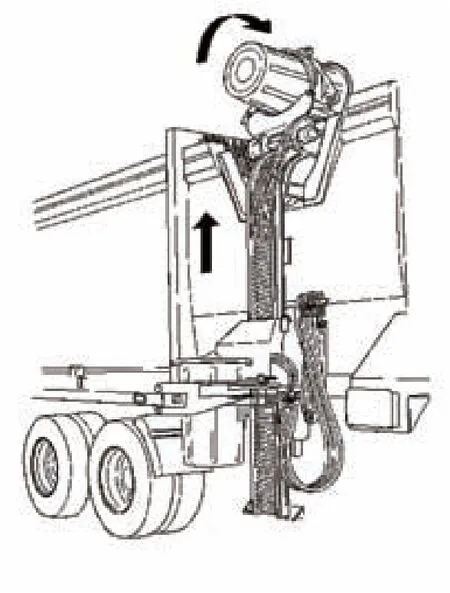
圖9 機械臂提桶卸料
2.3 機械臂放桶過程
液壓馬達帶動抱桶手爪沿著導(dǎo)軌翻轉(zhuǎn)并向下運動,伸展油缸伸出時帶動抱桶手爪(包括軌道)遠離車箱, 抱桶手爪到達垃圾桶放置位置,抱桶油缸縮回帶動抱桶手爪松開垃圾桶。
2.4 機械臂收回原點位置
伸展油缸縮回時帶動伸展臂(包括軌道)收回,機械臂收回原點位置。
3.性能分析
3.1 性能優(yōu)勢
McNeilus 公司Zero-Radius 型機械臂伸出-縮回為簡單的直線運動,上料時抱桶手爪在液壓馬達的推動下沿著導(dǎo)軌運動,整個運動過程控制比較簡單,運動平穩(wěn)性較好,駕駛員也容易操作。同時由于采用了導(dǎo)軌式結(jié)構(gòu),機械臂上料高度更高。
3.2 性能劣勢
由于采用導(dǎo)軌的框架結(jié)構(gòu),整個機械臂占用空間比較大,直線運動的伸展臂的伸出距離較短。由于導(dǎo)軌隨著伸展臂一起運動,其結(jié)構(gòu)強度要求更高。
結(jié)語
國外垃圾機械臂上料機構(gòu)有很多種,不同的結(jié)構(gòu)都有其設(shè)計特點,本文僅僅選取了三種比較有代表性的進行了技術(shù)分析。機械臂上料機構(gòu)最大的特點就是無人化,大大減輕了環(huán)衛(wèi)工人的勞動強度,大大降低了垃圾收運的成本,是未來垃圾收運的發(fā)展方向。國內(nèi)的垃圾機械臂設(shè)計人員在參考國外機械臂上料機構(gòu)設(shè)計時,一定要考慮到不同結(jié)構(gòu)性能上的優(yōu)缺點,并且一定要結(jié)合國內(nèi)垃圾成分特點以及國內(nèi)垃圾收運模式進行綜合考慮,才能設(shè)計出適合國內(nèi)垃圾收運特點的機械臂。
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學(xué)科學(xué)(學(xué)生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發(fā)展導(dǎo)向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09
