考慮操縱穩(wěn)定性的自動(dòng)駕駛汽車(chē)軌跡綜合優(yōu)化方法
2019-12-10 03:09:18蘭鳳崇李詩(shī)成陳吉清劉照麟
湖南大學(xué)學(xué)報(bào)·自然科學(xué)版 2019年10期
蘭鳳崇 李詩(shī)成 陳吉清 劉照麟

摘 ? 要:針對(duì)自動(dòng)駕駛汽車(chē)在局部軌跡規(guī)劃上對(duì)車(chē)輛操縱穩(wěn)定性考慮不足、對(duì)車(chē)輛模型過(guò)度簡(jiǎn)化和缺少對(duì)車(chē)輛舒適性客觀評(píng)價(jià)的問(wèn)題,建立了考慮車(chē)輛操縱穩(wěn)定性的車(chē)輛三自由度模型,模擬自動(dòng)駕駛汽車(chē)換道場(chǎng)景,根據(jù)輸入車(chē)輪轉(zhuǎn)角得到輸出的換道軌跡,運(yùn)算得到車(chē)輛換道行駛參數(shù)化方程和行駛軌跡特征. 運(yùn)用BP神經(jīng)網(wǎng)絡(luò)對(duì)行駛軌跡特征進(jìn)行識(shí)別,得到自動(dòng)駕駛汽車(chē)換道持續(xù)時(shí)間和橫向偏移距離所對(duì)應(yīng)的車(chē)輪轉(zhuǎn)角變化關(guān)系. 在不同換道車(chē)速下,根據(jù)不同換道持續(xù)時(shí)間和橫向偏移距離,輸入車(chē)輪轉(zhuǎn)角得到換道優(yōu)化軌跡簇和操縱穩(wěn)定性參數(shù). 在只考慮行駛效率和安全的常規(guī)軌跡優(yōu)化方法的基礎(chǔ)上,構(gòu)建軌跡綜合優(yōu)化目標(biāo)函數(shù),考慮表征車(chē)輛換道過(guò)程舒適性和操縱穩(wěn)定性的(橫擺、側(cè)傾、側(cè)向)加速度變化率均值,提出一種基于行駛效率、安全性、舒適性和操縱穩(wěn)定性的軌跡綜合優(yōu)化方法. 對(duì)軌跡綜合優(yōu)化目標(biāo)函數(shù)進(jìn)行求解得到最優(yōu)換道行駛軌跡,聯(lián)合仿真結(jié)果表明該方法優(yōu)于常規(guī)軌跡優(yōu)化方法且舒適性、操縱穩(wěn)定性改善達(dá)20%以上.
關(guān)鍵詞:自動(dòng)駕駛;神經(jīng)網(wǎng)絡(luò);操縱穩(wěn)定性;軌跡優(yōu)化
中圖分類(lèi)號(hào):U471.1 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻(xiàn)標(biāo)志碼:A
Comprehensive Approach for Trajectory Optimization
of Autopilot Vehicles Considering Handling Stability
LAN Fengchong1,2,LI Shicheng1,2,CHEN Jiqing1,2?覮,LIU Zhaolin1,2
(1. School of Mechanical and Automotive Engineering,South China University of Technology,Guangzhou 510640,China;
2. Guangdong Provincial Automobile Engineering Key Laboratory,South China University of Technology,Guangzhou 510640,China)
Abstract: Automated driving vehicles have problems in local trajectory planning, such as insufficient consideration of vehicle handling stability, excessive simplification of vehicle models, and lack of objective evaluation of vehicle comfort. Considering the stability of vehicle handling, a three-degree-of-freedom model of vehicle is established. The lane changing scene of the self-driving car is simulated. The lane-changing trajectory is output by inputting the wheel angle,and the parameterization equation and driving trajectory characteristics of the vehicle are calculated. The BP neural network is used to identify the trajectory characteristics, and the change relationship between the lane change duration and lateral offset distance of the autonomous driving vehicle is obtained. At different lane changing speeds, according to different lane changing durations and lateral offset distances, the input wheel angles are used to obtain the lane change optimized by the trajectory clusters and steering stability parameters. Based on the conventional trajectory optimization method that only considers the driving efficiency and safety, the trajectory optimization objective function is constructed, by using the value of the yaw, roll, and lateral acceleration rate of the vehicle lane change process. A comprehensive trajectory optimization method based on driving efficiency, safety, comfort and steering stability is proposed. The trajectory optimization objective function is solved to obtain the optimal lane change trajectory. The joint simulation results show that the method is superior to the conventional trajectory optimization method, and the comfort and steering stability are improved by more than 20%.
Key words: automatic driving;neural networks;handling stability;trajectory optimization
近年來(lái)自動(dòng)駕駛汽車(chē)致力于降低駕駛員操作復(fù)雜性,提高自動(dòng)駕駛汽車(chē)的主動(dòng)安全性,但是其發(fā)展同樣面臨考驗(yàn),如局部軌跡規(guī)劃中車(chē)輛行駛軌跡生成方式的可行性、軌跡參數(shù)化方法是否符合車(chē)輛運(yùn)動(dòng)學(xué)特性和軌跡優(yōu)化方法是否能充分考慮車(chē)輛操縱穩(wěn)定性、乘員舒適性等.
早期的軌跡規(guī)劃是基于行駛軌跡的幾何模型對(duì)車(chē)輛行駛位置狀態(tài)進(jìn)行約束,對(duì)車(chē)輛軌跡優(yōu)化時(shí)沒(méi)有充分考慮車(chē)輛的動(dòng)力學(xué)和運(yùn)動(dòng)學(xué)參數(shù),使得車(chē)輛無(wú)法完成按指定軌跡行駛,軌跡規(guī)劃結(jié)果存在缺陷. 部分研究[1-3]以移動(dòng)式機(jī)器人的路徑規(guī)劃方法對(duì)自動(dòng)駕駛汽車(chē)進(jìn)行橫向、縱向的跟蹤預(yù)瞄,以跟隨控制參數(shù)使得車(chē)輛沿指定路徑行駛. 但其考慮的是車(chē)輛簡(jiǎn)化的二自由度模型,不能很好地評(píng)價(jià)操縱穩(wěn)定性,且軌跡規(guī)劃不一定光滑無(wú)突變.
近年來(lái),對(duì)自動(dòng)駕駛汽車(chē)軌跡規(guī)劃方法致力于尋求軌跡曲率連續(xù)且安全無(wú)碰撞的參數(shù)化方法[4-6],如B樣條曲線、β樣條曲線、多項(xiàng)式等,建立軌跡優(yōu)化評(píng)價(jià)函數(shù)對(duì)行駛軌跡進(jìn)行擇優(yōu). 大部分優(yōu)化算法結(jié)合自動(dòng)駕駛汽車(chē)的自身車(chē)輛系統(tǒng)[7-8],在保證車(chē)輛安全性條件下,對(duì)車(chē)輛的加速度、碰撞概率、行駛效率等多個(gè)性能指標(biāo)進(jìn)行優(yōu)化,得到最優(yōu)行駛軌跡. 由于傳統(tǒng)算法簡(jiǎn)化的動(dòng)力學(xué)模型不能兼顧操縱穩(wěn)定性和舒適性,故搭建操縱穩(wěn)定性、舒適性、換道效率為一體的評(píng)價(jià)目標(biāo)函數(shù)[9-10]顯得很有必要.
為了在軌跡規(guī)劃中最大程度地反映實(shí)車(chē)性能,建立了車(chē)輛橫擺、側(cè)傾、側(cè)向的三自由度動(dòng)力學(xué)模型,得到車(chē)輛行駛軌跡和操縱穩(wěn)定性參數(shù),對(duì)其輸出的軌跡進(jìn)行參數(shù)化表達(dá)和識(shí)別,得到車(chē)輪轉(zhuǎn)角輸出規(guī)律. 在車(chē)輛具體駕駛場(chǎng)景下,對(duì)車(chē)輛制動(dòng)性能進(jìn)行分析,得到車(chē)輛軌跡規(guī)劃安全域、曲率連續(xù)光滑的行駛軌跡. 這不僅保證了車(chē)輛的安全平穩(wěn)運(yùn)行而且能夠通過(guò)車(chē)輛模型獲得實(shí)時(shí)車(chē)輛姿態(tài)參數(shù)和操縱穩(wěn)定性參數(shù). 對(duì)比常規(guī)軌跡優(yōu)化算法,提出并求解一種考慮車(chē)輛操縱穩(wěn)定性、舒適性、換道效率為一體的軌跡綜合優(yōu)化方法.
1 ? 考慮操縱穩(wěn)定性的車(chē)輛模型
1.1 ? 車(chē)輛動(dòng)力學(xué)方程
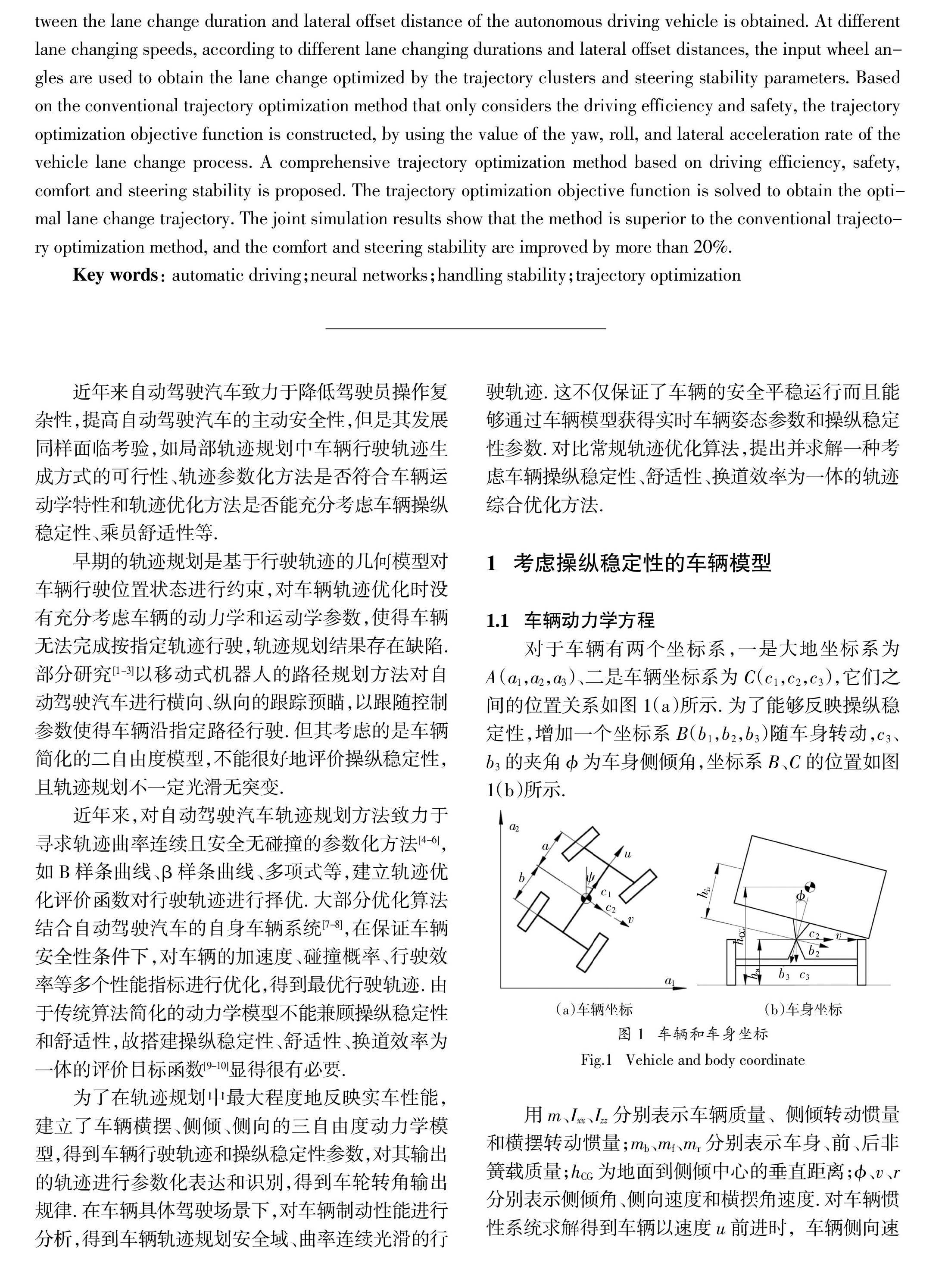
對(duì)于車(chē)輛有兩個(gè)坐標(biāo)系,一是大地坐標(biāo)系為
A(a1,a2,a3)、二是車(chē)輛坐標(biāo)系為C(c1,c2,c3),它們之間的位置關(guān)系如圖1(a)所示. 為了能夠反映操縱穩(wěn)定性,增加一個(gè)坐標(biāo)系B(b1,b2,b3)隨車(chē)身轉(zhuǎn)動(dòng),c3、b3的夾角?準(zhǔn)為車(chē)身側(cè)傾角,坐標(biāo)系B、C的位置如圖1(b)所示.
用m、Ixx、Izz分別表示車(chē)輛質(zhì)量、側(cè)傾轉(zhuǎn)動(dòng)慣量和橫擺轉(zhuǎn)動(dòng)慣量;mb、mf、mr分別表示車(chē)身、前、后非簧載質(zhì)量;hCG為地面到側(cè)傾中心的垂直距離;?準(zhǔn)、v、r分別表示側(cè)傾角、側(cè)向速度和橫擺角速度. 對(duì)車(chē)輛慣性系統(tǒng)求解得到車(chē)輛以速度u前進(jìn)時(shí),車(chē)輛側(cè)向速度v、橫擺角速度r和車(chē)身側(cè)傾角?準(zhǔn)的動(dòng)力學(xué)關(guān)系為:
(mb + mf + mr)(■ + ur)+(amf - bmr )■ +
mb hb■ = Fyf + Fyr ? ? ?(1)
(amf - bmr )(■ + ur)(Izz■ + Ixz■) = aFyf - bFyr )
(2)
Ixx■ + C?準(zhǔn)■ + (K?準(zhǔn) - mb ghb)?準(zhǔn) +
mb hb(■ + ur) + Ixz■ = df Fyf + drFyr ? ? ?(3)
對(duì)方程進(jìn)行數(shù)學(xué)變換可得關(guān)于[?鬃 ?v ? r ? ?準(zhǔn) ?■]T矩陣表達(dá)式為:
0 ? ? ? ? ? ? ?0 ? ? ? ? ? ? -1 ? ? ? ? ? ? 0 ? ? ? ? ? 00 ? ? ? ■ ? ? ? a11 ? ? ? ? ? ? 0 ? ? ? ? ? 00 ? ? ? ■ ? ? ? a12 ? ? ? ? ? ? 0 ? ? ? ? ? 00 ? ? ■ ? ?a13 ? ?K?準(zhǔn) - mb ghb ? ?00 ? ? ? ? ? ? ?0 ? ? ? ? ? ? ? 0 ? ? ? ? ? ? ?0 ? ? ? ?-1 ?鬃vr?準(zhǔn) ■+
1 ? ? ? ? ? 0 ? ? ? ? ? ? ? ? ? ?0 ? ? ? ? ? 0 ? ? ? ? 00 ? ? ? ? ? m ? ? ? ? ? ?amf ?- bmr ? ?0 ? ? ? mb hb0 ? ?amf ?- bmr ? ? ? ? ? ?Izz ? ? ? ? ? 0 ? ? ? ? 00 ? ? ? ? mb hb ? ? ? ? ? ? ? 0 ? ? ? ? ? ?C?準(zhǔn) ? ? ? ? Ixx0 ? ? ? ? ? 0 ? ? ? ? ? ? ? ? ?0 ? ? ? ? ? ? 1 ? ? ? ? ?0 ?鬃■■■ ■=
0 CαfaCαfdf Cαf ? ?0δf ? ? (4)
式中:K?準(zhǔn)、C?準(zhǔn)均為常量,分別為懸架側(cè)傾剛度系數(shù)和側(cè)傾阻尼系數(shù);df、dr分別為單位車(chē)身側(cè)傾造成的前后輪側(cè)向偏移量;Cα為輪胎側(cè)偏剛度.
a11 = mu + ■
a12 = ■ + (amf - bmr)u
a13 = ■ + mb hu
令X1 = [?鬃 ?v ? r ? ?準(zhǔn) ?■]T
E0 = [0 ? Cαf ? ? aCαf ? ? df Cαf ? 0]T
E1=0 ? ? ? ? ? ? ?0 ? ? ? ? ? ? -1 ? ? ? ? ? ? 0 ? ? ? ? ? ? 00 ? ? ? ■ ? ? ? a11 ? ? ? ? ? ? 0 ? ? ? ? ? ? 00 ? ? ? ■ ? ? ? a12 ? ? ? ? ? ? 0 ? ? ? ? ? ? 00 ? ? ■ ? ?a13 ? ?K?準(zhǔn) - mb ghb ? ? ?00 ? ? ? ? ? ? ?0 ? ? ? ? ? ? ? 0 ? ? ? ? ? ? 0 ? ? ? ? ? ?-1
E2 =1 ? ? ? ? ? 0 ? ? ? ? ? ? ? ? ? ?0 ? ? ? ? ? 0 ? ? ? ? 00 ? ? ? ? ? m ? ? ? ? ? ?amf ?- bmr ? ?0 ? ? ? mb hb0 ? ?amf ?- bmr ? ? ? ? ? ?Izz ? ? ? ? ? 0 ? ? ? ? 00 ? ? ? ? mb hb ? ? ? ? ? ? ? 0 ? ? ? ? ? ?C?準(zhǔn) ? ? ? ? Ixx0 ? ? ? ? ? 0 ? ? ? ? ? ? ? ? ?0 ? ? ? ? ? ? 1 ? ? ? ? ?0
則 ? E1X1 + E2 ■1 = E0 δf ? ? ? (5)
其中X1為反映車(chē)輛操縱穩(wěn)定性參數(shù)的狀態(tài)空間. 令U=δf為系統(tǒng)輸入車(chē)輪轉(zhuǎn)角,由A、B、C、D矩陣構(gòu)造車(chē)輛三自由度車(chē)輛運(yùn)動(dòng)學(xué)模型狀態(tài)空間變量Y1為:
■1 = AX1 + BUY1 = CX1 + DU ? ?(6)
其中:A=-(E2 )-1E1;B=(E2 )-1E0;C為5階對(duì)角單位矩陣;D為五行一列0矩陣.
不同車(chē)輛參數(shù)和車(chē)速會(huì)不同程度地影響車(chē)輛操縱穩(wěn)定性和舒適性,對(duì)比復(fù)雜的整車(chē)系統(tǒng),三自由度模型能夠充分反映不同車(chē)輛的操縱穩(wěn)定性,而傳統(tǒng)的二自由度模型不能充分考慮不同車(chē)輛的操縱穩(wěn)定性能,進(jìn)而無(wú)法客觀評(píng)價(jià)乘員的舒適性.
根據(jù)車(chē)輛坐標(biāo)和大地坐標(biāo)關(guān)系轉(zhuǎn)換,輸出的航向角ψ、側(cè)向速度v以及速度u之間的關(guān)系表示為:
■ = ucosψ - vsinψ■ = usinψ + vcosψ ? ?(7)
式中:X、Y為大地坐標(biāo)系下車(chē)輛縱向和橫向行駛距離,即為車(chē)輛行駛軌跡.
1.2 特定工況下模型操縱穩(wěn)定性參數(shù)響應(yīng)
在Simulink模塊搭建自動(dòng)駕駛汽車(chē)的三自由度動(dòng)力學(xué)模型,同時(shí)在Carsim中輸入車(chē)輛參數(shù). 自動(dòng)駕駛汽車(chē)參數(shù)見(jiàn)表1.
LD = uc·tlatδf = Ksin(ωt) X = uc·tY=-■sin■+■,t∈[0,tlat+td]
(8)
對(duì)模型輸出軌跡進(jìn)行擬合得到三自由度模型響應(yīng)遲滯時(shí)間為0.22 s,同時(shí)擬合得到軌跡與標(biāo)準(zhǔn)正弦換道軌跡最大橫向誤差小于0.1 m.
2.3 換道軌跡識(shí)別
根據(jù)軌跡規(guī)劃技術(shù)路線圖(圖10),為了獲得具體駕駛場(chǎng)景下?lián)Q道軌跡對(duì)應(yīng)的車(chē)輛車(chē)輪轉(zhuǎn)角變化規(guī)律,進(jìn)而得到車(chē)輛行駛時(shí)的姿態(tài)參數(shù)和操縱穩(wěn)定性參數(shù),需要對(duì)換道軌跡進(jìn)行識(shí)別[13-14].
■
圖10 ? 軌跡規(guī)劃技術(shù)路線
Fig.10 ? Trajectory planning technical route
由換道軌跡參數(shù)化方程分析可得,輸入一組車(chē)輛前輪轉(zhuǎn)角就會(huì)得到一組換道軌跡,其中,換道的正弦車(chē)輪轉(zhuǎn)角幅值為K,橫向換道距離為YD;由于ω =2π/tlat,所以模型的輸入是一組變化的車(chē)輪轉(zhuǎn)角(關(guān)于K、ω的函數(shù)),輸出是一組換道橫向距離YD和縱向距離LD,故規(guī)律特征數(shù)據(jù)為K、ω、YD. 對(duì)特征數(shù)據(jù)進(jìn)行分析,選擇BP神經(jīng)網(wǎng)絡(luò)訓(xùn)練算法對(duì)軌跡進(jìn)行識(shí)別,輸入量為ω、YD,輸出為車(chē)輛正弦轉(zhuǎn)角變化幅值K.
由于車(chē)輪側(cè)偏呈線性變化,側(cè)向加速度不超過(guò)0.4g,正常換道持續(xù)時(shí)間約為1~7 s,可得到K、ω的取值范圍分別為:
ω ∈■,2π K ∈ (0,0.611) ? ?(9)
將K以0.01 rad為間隔分為61組,以0.2 s的換道持續(xù)時(shí)間為間隔將ω分為30組,在車(chē)輛速度為10 m/s的條件下,令車(chē)輛模型輸入不同的正弦前輪轉(zhuǎn)角,循環(huán)調(diào)用模型,循環(huán)采集參數(shù)K、ω、YD,可以得到訓(xùn)練集1 830組,部分結(jié)果如表2所示,舍去YD ≥ 10 m的數(shù)據(jù)可得有效訓(xùn)練集為471組. 為了滿(mǎn)足不同車(chē)輛速度換道工況,還分別采集了12 m/s、15 m/s的訓(xùn)練集,有效數(shù)據(jù)分別為374和307組.
表2 ? 10 m/s車(chē)速下訓(xùn)練集部分?jǐn)?shù)據(jù)
Tab.2 ? Partial data of 10 m/s
■
采集特征量后,搭建神經(jīng)網(wǎng)絡(luò)還需要考慮:訓(xùn)練函數(shù)算法、隱含層數(shù)量、神經(jīng)元節(jié)點(diǎn)數(shù)、激活函數(shù)、輸出函數(shù)、學(xué)習(xí)率等. 訓(xùn)練函數(shù)的選取直接關(guān)系到神經(jīng)網(wǎng)絡(luò)訓(xùn)練精確度,對(duì)軌跡識(shí)別起關(guān)鍵作用. 通過(guò)控制變量實(shí)驗(yàn)對(duì)最優(yōu)算法進(jìn)行篩選,選擇u = 10 m/s時(shí)的訓(xùn)練集,訓(xùn)練網(wǎng)絡(luò)隱含層為兩層,結(jié)構(gòu)為2-14-13-1,隱含層第1層激活函數(shù)選用雙極S形函數(shù)、隱含層第2層和輸出層為線性函數(shù)、訓(xùn)練誤差為10-7、學(xué)習(xí)率為0.05、訓(xùn)練迭代次數(shù)為500次,為了達(dá)到訓(xùn)練函數(shù)快速收斂,對(duì)訓(xùn)練集進(jìn)行歸一化處理后,訓(xùn)練函數(shù)的結(jié)果如表3所示.
表3 ? 訓(xùn)練函數(shù)的選擇
Tab.3 ? Selection of training function
■
訓(xùn)練次數(shù)為訓(xùn)練集誤差達(dá)到最小時(shí)的訓(xùn)練次數(shù),當(dāng)訓(xùn)練次數(shù)較少時(shí),說(shuō)明訓(xùn)練函數(shù)不能使訓(xùn)練集的誤差減小,反而可能使誤差增大,結(jié)合訓(xùn)練函數(shù)的回歸相關(guān)性可得L-M算法和Bayes規(guī)范化算法都能較好地訓(xùn)練神經(jīng)網(wǎng)絡(luò). 其中L-M算法,訓(xùn)練結(jié)果收斂性好,達(dá)到最小誤差的迭代次數(shù)少.
在激活函數(shù)的選擇上,線性函數(shù)能夠減少訓(xùn)練的時(shí)間,但是非線性函數(shù)能夠提高訓(xùn)練網(wǎng)絡(luò)的精度,由于前面對(duì)訓(xùn)練集進(jìn)行了[-1,1]的歸一化處理,故對(duì)線性函數(shù)(調(diào)用字符‘purelin)和雙極S形函數(shù)(調(diào)用字符‘tansig)的訓(xùn)練精度進(jìn)行比較,運(yùn)用控制變量法選擇隱含層和輸出層激活函數(shù)對(duì)神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練,得到訓(xùn)練結(jié)果如表4所示.
表4 ? 激活函數(shù)的選擇
Tab.4 ? Activation function selection
■
由表4可知,隱含層采用雙極函數(shù)、輸出層采用線性函數(shù)的訓(xùn)練時(shí)間較短,回歸相關(guān)性好. 因此,神經(jīng)網(wǎng)絡(luò)的訓(xùn)練函數(shù)隱含層第1層采用雙極S函數(shù),第2層采用線性函數(shù),輸出層采用線性激活函數(shù).
類(lèi)比以上的選擇情況,通過(guò)控制變量法最終確定神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)為2-14-13-1;訓(xùn)練函數(shù)為L(zhǎng)-M算法;輸入集激活函數(shù)選擇雙極S函數(shù)和線性函數(shù),輸出集激活函數(shù)選擇線性函數(shù);訓(xùn)練誤差為10-7;學(xué)習(xí)率為0.05;迭代次數(shù)為500次. 網(wǎng)絡(luò)訓(xùn)練誤差如圖11所示.
■
迭代次數(shù)
圖11 ? 神經(jīng)網(wǎng)絡(luò)訓(xùn)練誤差
Fig.11 ? Neural network training error
從訓(xùn)練誤差結(jié)果可得,BP神經(jīng)網(wǎng)絡(luò)能夠很好地對(duì)車(chē)輛模型輸出的軌跡和參數(shù)化軌跡進(jìn)行識(shí)別. 當(dāng)輸入換道橫向距離和換道持續(xù)時(shí)間為ω = 2π/tlat時(shí),可得到換道時(shí)車(chē)輪轉(zhuǎn)角輸入,將車(chē)輪轉(zhuǎn)角輸入自動(dòng)駕駛汽車(chē)三自由度模型獲得操縱穩(wěn)定性參數(shù).
3 軌跡優(yōu)化分析
3.1 軌跡優(yōu)化目標(biāo)函數(shù)搭建
參數(shù)化表達(dá)式中,LD為車(chē)輛換道的縱向前進(jìn)距離,它直接影響自動(dòng)駕駛汽車(chē)的換道持續(xù)時(shí)間;車(chē)輛的換道橫向距離為YD,根據(jù)國(guó)家標(biāo)準(zhǔn)取3.75 m,故影響換道的變量為L(zhǎng)D,令換道時(shí)間為1~7 s,當(dāng)u = 10 m/s時(shí),則LD∈(10,70).
在車(chē)輛安全域內(nèi)生成60條換道軌跡,對(duì)搭建的BP神經(jīng)網(wǎng)絡(luò)模型進(jìn)行仿真得到換道時(shí)車(chē)輛前輪轉(zhuǎn)角的變化,將前輪轉(zhuǎn)角輸入到自動(dòng)駕駛汽車(chē)三自由度車(chē)輛模型中,得到換道時(shí)車(chē)輛姿態(tài)參數(shù)和操縱穩(wěn)定性參數(shù);同理可以分別獲得車(chē)速為u = 12 m/s、15 m/s時(shí)的評(píng)價(jià)參數(shù).
評(píng)價(jià)車(chē)輛換道軌跡的好壞有很多方法[15],換道評(píng)價(jià)方法不僅影響車(chē)輛行駛安全,還影響車(chē)輛的動(dòng)力學(xué)性能(如操縱穩(wěn)定性、舒適性、行駛效率等). 換道時(shí)間長(zhǎng)短反映汽車(chē)的行駛效率,而車(chē)輛的橫向和縱向加速度不同程度地影響車(chē)輛性能;由于在換道過(guò)程中速度變化不明顯,故常規(guī)軌跡優(yōu)化方法選擇換道持續(xù)時(shí)間和橫向加速度來(lái)搭建軌跡優(yōu)化目標(biāo)函數(shù). 常規(guī)換道軌跡優(yōu)化函數(shù)變量分別為綜合加速度和換道時(shí)間tlat,其中綜合加速度表示為:
a = ■ ?= Aymax ? (10)
考慮變量權(quán)值,當(dāng)評(píng)價(jià)體系的值取最小時(shí),對(duì)應(yīng)的換道軌跡為軌跡優(yōu)化簇的最優(yōu)換道軌跡,故常規(guī)軌跡優(yōu)化目標(biāo)函數(shù)為:
J1 = w1 A2 ? ? ?ymax+ w2 t 2 ? ?lat ? (11)
式中:Aymax為橫向加速度;w1、w2均為評(píng)價(jià)變量的權(quán)重系數(shù);tlat為換道持續(xù)時(shí)間.
常規(guī)軌跡優(yōu)化目標(biāo)函數(shù)中,其橫向加速度為換道過(guò)程中的極值,并不能反映車(chē)輛在換道過(guò)程中的變化情況,存在局限性,且常規(guī)軌跡優(yōu)化方法是針對(duì)二自由度車(chē)輛模型建立的評(píng)價(jià)體系,對(duì)汽車(chē)的操縱穩(wěn)定性和舒適性缺少客觀評(píng)價(jià). 本文在常規(guī)軌跡優(yōu)化評(píng)價(jià)算法的基礎(chǔ)上對(duì)優(yōu)化評(píng)價(jià)函數(shù)進(jìn)行了改進(jìn),提出了基于車(chē)輛行駛效率和操縱穩(wěn)定性的軌跡綜合優(yōu)化目標(biāo)函數(shù),其中變量為車(chē)輛持續(xù)換道時(shí)間、橫向加速度變化率均值、側(cè)傾角加速度變化率均值和橫擺角加速度變化率均值. 這樣既能充分考慮車(chē)輛的行駛效率,也能客觀評(píng)價(jià)車(chē)輛的操縱穩(wěn)定性、舒適性和車(chē)輛狀態(tài). 軌跡綜合優(yōu)化目標(biāo)函數(shù)為:
J2 = w1 (■ + ■ + ■) + w2 t 2 ? ?lat ? (12)
式中:■、■、■分別為橫向加速度變化率均值、側(cè)傾角加速度變化率均值和橫擺角加速度變化率均值的平方. 其表達(dá)式分別為:
■ = (2(■ymax - ■ymin)/t ? ? lat)2 ■ = (2(■max - ■min)/t ? ? lat)2 ■ = (2(■max - ■min)/t ? ? lat)2 ? ? (13)
3.2 車(chē)輛動(dòng)力學(xué)約束條件
車(chē)輛在換道過(guò)程中,車(chē)輛與障礙物的距離需要滿(mǎn)足最小安全距離模型,故安全距離約束為:
ΔL ≥ Ssafe,0 ≤ t ≤ t ? ? lat ? (14)
式中:ΔL為車(chē)輛與障礙物的縱向距離.
車(chē)輛在換道時(shí),從主車(chē)道到目標(biāo)車(chē)道行駛的過(guò)程中,需要對(duì)車(chē)輛的橫向偏移距離進(jìn)行約束,否則車(chē)輛可能會(huì)與其他車(chē)輛或障礙物發(fā)生碰撞.橫向偏移距離約束為:
3.6 m ≤ YD ≤3.9 m ? (15)
車(chē)輛在換道過(guò)程中操縱穩(wěn)定性參數(shù)影響車(chē)輛的舒適性和安全性,當(dāng)橫向加速度和側(cè)傾角過(guò)大時(shí),車(chē)輛會(huì)出現(xiàn)甩尾或側(cè)翻風(fēng)險(xiǎn). 因此,需要對(duì)車(chē)輛進(jìn)行約束,根據(jù)對(duì)車(chē)輛側(cè)傾角關(guān)于側(cè)翻預(yù)警的研究[16]可得,加速度約束為:
ay ≤ 0.8g ? ? ?(16)
3.3 軌跡綜合優(yōu)化目標(biāo)函數(shù)求解
對(duì)車(chē)輛換道速度分別為u = 10 m/s、12 m/s和15 m/s的評(píng)價(jià)參數(shù)進(jìn)行采集,求解常規(guī)軌跡優(yōu)化目標(biāo)函數(shù),得到不同權(quán)重比下、車(chē)輛最優(yōu)換道軌跡所對(duì)應(yīng)的橫向加速度和最優(yōu)換道時(shí)間,結(jié)果如圖12所示.
■
權(quán)重比w2 /w1
圖12 ? 常規(guī)軌跡優(yōu)化方法下最優(yōu)換道時(shí)間和橫向加速度
Fig.12 ? Optimal lane change time and lateral
acceleration under conventional methods
不同權(quán)重比分配影響換道過(guò)程中橫向加速度與最優(yōu)換道時(shí)間. 當(dāng)評(píng)價(jià)函數(shù)取最小值時(shí),得到的換道軌跡既為安全域中軌跡簇的最優(yōu)換道軌跡. 根據(jù)不同權(quán)重比下得到的最優(yōu)換道時(shí)間,通過(guò)神經(jīng)網(wǎng)絡(luò)識(shí)別得到自動(dòng)駕駛車(chē)輛的正弦車(chē)輪轉(zhuǎn)角變化規(guī)律,從車(chē)輛模型中輸出不同的換道軌跡,如圖13所示.
■
車(chē)輛換道縱向行駛距離/m
圖13 ? 不同權(quán)重比下的換道軌跡
Fig.13 ?Lane change trajectory under different weights
根據(jù)車(chē)輛動(dòng)力學(xué)模型輸出的操縱穩(wěn)定性參數(shù)可以分析換道時(shí)間效率和汽車(chē)行駛性能. 以車(chē)速10 m/s為例,權(quán)重比越大,換道軌跡越陡峭,行駛效率越高,換道持續(xù)時(shí)間越短;權(quán)重比越小,軌跡越平緩,但換道持續(xù)時(shí)間增加,換道效率下降. 由圖12可知,當(dāng)權(quán)重比大于1時(shí),換道效率增加,隨之出現(xiàn)換道粗暴行為,車(chē)輛橫向加速度較大. 當(dāng)權(quán)重比為1時(shí),不同車(chē)速換道軌跡如圖14所示. 由圖14可知,車(chē)輛換道過(guò)程速度越小,車(chē)輛換道軌跡坡度越大;速度越大車(chē)輛換道軌跡越平緩,車(chē)輛縱向換道距離也相對(duì)較大.
■
車(chē)輛換道縱向行駛距離/m
圖14 ? 權(quán)重比為1時(shí)不同車(chē)速換道軌跡
Fig.14 ? Different speed-changing track with a
weight ratio of 1
常規(guī)軌跡優(yōu)化方法存在一定的局限性,采用軌跡綜合優(yōu)化方法進(jìn)行求解,對(duì)采集的數(shù)據(jù)進(jìn)行處理可得,不同權(quán)重比下軌跡綜合優(yōu)化算法最優(yōu)換道時(shí)間和加速度變化率均值如圖15所示. 與常規(guī)軌跡優(yōu)化算法對(duì)比,軌跡綜合優(yōu)化算法下的車(chē)輛換道時(shí)間與綜合加速度變化率曲線變化平緩,最優(yōu)換道時(shí)間有所增加,車(chē)輛總體性能更加偏向于舒適性,操縱穩(wěn)定性更好,有效地避免了換道粗暴行為.
■
權(quán)重比w2 /w1
圖15 ? 軌跡綜合優(yōu)化方法最優(yōu)換道時(shí)間和加速度變化率均值
Fig.15 ? Mean optimization method for optimal trajectory
time and acceleration rate
當(dāng)車(chē)速為10 m/s時(shí),在不同權(quán)重比下,采用軌跡綜合優(yōu)化算法可得換道軌跡如圖16所示. 由圖13和圖16可知,軌跡綜合優(yōu)化算法所得車(chē)輛換道軌跡更加平緩,車(chē)輛的操縱穩(wěn)定性有所改善,更偏向舒適性.
由圖15可得,為了避免換道粗暴和充分考慮操縱穩(wěn)定性、舒適性和換道效率,取權(quán)重比為1.5時(shí),不同車(chē)速的換道軌跡如圖17所示,與常規(guī)軌跡優(yōu)化
■
車(chē)輛換道縱向行駛距離 /m
圖16 ? 不同權(quán)重比下的軌跡綜合優(yōu)化方法的換道軌跡
Fig.16 ? Lane change trajectory of trajectory comprehensive
optimization algorithm with different weight ratio
■
車(chē)輛換道縱向行駛距離 /m
圖17 ? 權(quán)重比為1.5時(shí)不同車(chē)速換道軌跡
Fig.17 ? Different speed-changing track
with a weight ration of 1.5
算法的最優(yōu)換道軌跡對(duì)比,軌跡綜合優(yōu)化算法更偏向于操縱穩(wěn)定性和舒適性,同時(shí)換道效率也有保障,換道軌跡更加平緩. 所以,軌跡綜合優(yōu)化目標(biāo)函數(shù)評(píng)價(jià)變量權(quán)重比取w2 /w1 = 1.5.
4 ? 對(duì)比分析和評(píng)價(jià)
在保證車(chē)輛行駛安全的前提下,在Carsim- Simulink聯(lián)合仿真平臺(tái)對(duì)自動(dòng)駕駛汽車(chē)不同速度工況執(zhí)行換道操作,得到常規(guī)軌跡優(yōu)化目標(biāo)函數(shù)和軌跡綜合優(yōu)化目標(biāo)函數(shù)的換道評(píng)價(jià)參數(shù)分別如圖18和圖19所示.
■
時(shí)間 /s
圖18 ? 在車(chē)速為10 m/s時(shí)車(chē)輛換道評(píng)價(jià)參數(shù)
Fig.18 ? Evaluation parameters for 10 m/s lane change
■
時(shí)間 /s
圖19 ? 在車(chē)速為15 m/s時(shí)車(chē)輛換道評(píng)價(jià)參數(shù)
Fig.19 ? Evaluation parameters for 15 m/s lane change
由換道評(píng)價(jià)參數(shù)可得仿真車(chē)輛換道持續(xù)時(shí)間和車(chē)輛橫向加速度隨時(shí)間變化關(guān)系,為了評(píng)價(jià)換道軌跡綜合優(yōu)化評(píng)價(jià)方法的科學(xué)性和時(shí)效性,以車(chē)輛換道持續(xù)時(shí)間差值與常規(guī)軌跡換道持續(xù)時(shí)間之比代表?yè)Q道效率下降率;以車(chē)輛換道橫向加速度最大值的差值和常規(guī)軌跡換道橫向加速度最大值之比表征車(chē)輛操縱穩(wěn)定性和舒適性改善程度,可得優(yōu)化效果評(píng)價(jià)表達(dá)式為:
Δt ≥ ■ × 100% ? (17)
Δa = -■ × 100% ? (18)
式中:Δt為換道效率下降率;Δa為換道操縱穩(wěn)定性、舒適性提升改善率;tlat1、tlat2分別為綜合優(yōu)化方法和常規(guī)優(yōu)化方法換道持續(xù)時(shí)間;Ay1max、Ay2max分別為綜合優(yōu)化方法和常規(guī)優(yōu)化方法換道過(guò)程橫向加速度最大值.
對(duì)圖18中參數(shù)進(jìn)行運(yùn)算可得換道效率下降率約為12.9%,換道操縱穩(wěn)定性、舒適性提升改善率約為25%. 同理,對(duì)圖19中參數(shù)進(jìn)行仿真,可得換道效率下降率約為11.4%,換道操縱穩(wěn)定性、舒適性提升改善率約為21.4%.
5 ? 結(jié) ? 論
1)針對(duì)常規(guī)軌跡優(yōu)化算法的車(chē)輛二自由度模
型,缺乏對(duì)操縱穩(wěn)定性參數(shù)的評(píng)價(jià),建立了考慮操縱穩(wěn)定性的三自由度模型,可充分反映自動(dòng)駕駛車(chē)輛的操縱穩(wěn)定性和舒適性.
2)基于車(chē)輛三自由度動(dòng)力學(xué)模型輸出的軌跡,
運(yùn)用BP神經(jīng)網(wǎng)絡(luò)算法對(duì)換道軌跡進(jìn)行識(shí)別. 提出并求解得到了考慮主動(dòng)安全性和舒適性、操縱穩(wěn)定性和行駛效率的軌跡綜合優(yōu)化評(píng)價(jià)方法.
3)求解軌跡綜合優(yōu)化目標(biāo)函數(shù)得到的最優(yōu)換道軌跡更加平緩,其舒適性、操縱穩(wěn)定性更好. 根據(jù)Carsim-Simulink聯(lián)合仿真和常規(guī)軌跡優(yōu)化方法比較可知:考慮操縱穩(wěn)定性的軌跡綜合優(yōu)化方法優(yōu)于常規(guī)軌跡優(yōu)化方法,且在換道效率下降較少的情況下,自動(dòng)駕駛汽車(chē)的舒適性、操縱穩(wěn)定性改善率超過(guò)20%,具有良好的實(shí)用性和可靠性. 同時(shí)車(chē)輛前輪轉(zhuǎn)角能夠?qū)崿F(xiàn)連續(xù)變化,沒(méi)有階躍突變,能夠較好地控制車(chē)輛,為自動(dòng)駕駛汽車(chē)換道控制提供幫助.
參考文獻(xiàn)
[1] ? ?GLASER S,VANHOLME B,MAMMAR S,et al. Maneuver-based trajec- tory planning for highly autonomous vehicles on real road with traffic and driver interaction[J]. IEEE Transactions on Intelligent Transportation Systems,2010,11(3):589—606.
[2] ? ?CHEN B C,LUAN B C,LEE K. Design of lane keeping system using adaptive model predictive control[C]// 2014 IEEE International Conference on Automation Science and Engineering (CASE). New York: IEEE,2014:922—926.
[3] ? ?HUANG C,NAGHDY F,DU H. Model predictive control-based lane change control system for an autonomous vehicle[C]//IEEE Region 10 Conference. Tenco:IEEE,2016:3349—3354.
[4] ? ?孫浩,鄧偉文,張素民,等. 考慮全局最優(yōu)性的汽車(chē)微觀動(dòng)態(tài)軌跡規(guī)劃[J]. 吉林大學(xué)學(xué)報(bào)(工學(xué)版),2014,44(4):918—924.
SUN H ,DENG W W ,ZHANG S M ,et al. Micro vehicle dynamic trajectory plan with global optimality[J]. Journal of Jilin University (Engineering and Technology Edition),2014,44(4):918—924.(In Chinese)
[5] ? ?PEI Y L,WANG Y G,ZHANG Y. Microscopic model of automobile lane-changing virtual desire trajectory by spline curves[J]. Promet-Traffic and Transportation,2010,22(3):203—208.
[6] ? ?G?魷MEZ-BRAVO F,CUESTA F,OLLERO A,et al. Continuous curvature path generation based on β-spline curves for parking manoeuvres[J]. Robotics and Autonomous Systems,2008,56(4):360—372.
[7] ? ?COELINGH E,EIDEHALL A,BENGTSSON M. Collision warning with full auto brake and pedestrian detection a practical example of automatic emergency braking[C]//The 13th Int IEEE Conf on Intelligent Transportation Systems(ITSC). Funchal:IEEE,2010: 155—160.
[8] ? ?SOUDBAKHSH D,ESKANDARIAN A,CHICHKA D. Vehicle collision avoidance maneuvers with limited lateral acceleration using optimal trajectory control[J]. Journal of Dynamic Systems,Measurement,and Control,2013,135(4):1—12.
[9] ? ?付驍鑫,江永亨,黃德先,等. 一種新的實(shí)時(shí)智能汽車(chē)軌跡規(guī)劃方法[J].控制與決策,2015,30(10):1751—1758.
FU X X,JIANG Y H,HUANG D X,et al. A novel real-time trajectory planning algorithm for intelligent vehicles[J]. Control and Decision,2015,30(10):1751—1758. (In Chinese)
[10] ?DIB W,SERRAO L,SCIARRETTA A. Optimal control to minimize trip time and energy consumption in electric vehicles[C]//IEEE Vehicle Power and Propulsion Conference.Chicago:IEEE,2011:1—8.
[11] ?ZHANG S M,DENG W W,ZHAO Q R,et al. Dynamic trajectory planning for vehicle autonomous driving [C]//Proceedings of the 2013 IEEE International Conference on Systems,Man,and Cybernetics. Washington DC:IEEE Computer Society,2013:4161—4166.
[12] ?JULA H,KOSMATOPOULOS E B,IOANNOU P A. Collision avoidance analysis for lane changing and merging[J]. IEEE Transactions on Vehicular Technology,2000,49(6):2295—2308.
[13] ?劉煬,湯傳玲,王靜,等. 一種基于BP神經(jīng)網(wǎng)絡(luò)的數(shù)字識(shí)別新方法[J]. 微型機(jī)與應(yīng)用,2012,31(7):36—39.
LIU Y,TANG C L,WANG J,et al. A new method of numerical recognition based on improved BP neural network[J]. Microcomputer and Its Applications, 2012, 31(7): 36—39. (In Chinese)
[14] ?李碩,汪猛. 基于換道起點(diǎn)和終點(diǎn)混合搜索算法的軌跡與行為特征研究[J]. 公路工程,2017,42(6):116—121.
LI S,WANG M. Lane-changing trajectoryand behavior analysis based on a mix searching algorithm for start point and end point [J].Highway Engineering,2017,42(6):116—121. (In Chinese)
[15] ?張琳,章新杰,郭孔輝,等. 未知環(huán)境下智能汽車(chē)軌跡規(guī)劃滾動(dòng)窗口優(yōu)化[J]. 吉林大學(xué)學(xué)報(bào)(工學(xué)版),2018,48(3):652—660.
ZHANG L,ZHANG X J,GUO K H,et al. Rolling window optimization for intelligent vehicle trajectory planning in unknown environment[J]. Journal of Jilin University(Engineering and Technology Edition),2018,48(3):652—660. (In Chinese)
[16] ?朱穎,周煒,郭志平,等. 基于車(chē)輛側(cè)傾角側(cè)翻預(yù)警算法的研究[J]. 機(jī)械設(shè)計(jì)與制造,2011(2):52—54.
ZHU Y,ZHOU W,GUO Z P,et al. The study of vehicles rollover forewarning algorithm based on pattern recognition[J]. Machinery Design & Manufacture,2011(2):52—54. (In Chinese)
