基于決策樹的非機動車闖紅燈行為研究
2019-12-10 09:39:10高航
物流科技 2019年11期
高航
摘要:為了研究非機動車騎行者的闖紅燈行為及其重要影響因素。采用錄像拍攝獲取紅燈期間到達的非機動車騎行者在交叉口的穿越行為數據,對騎行者在信號交叉口紅燈期間穿越行為的分類(即冒險主義行為、機會主義行為和守法行為)進行調整和更具體的描述,運用數據挖掘決策樹方法中的CHAID算法對非機動車闖紅燈行為數據進行分類并構建決策樹模型。結果表明,1344個騎行者中有60%以上實施了闖紅燈行為,騎行者的視覺搜索行為和交叉口其他騎行者的數量是影響闖紅燈行為的重要因素。
關鍵詞:闖紅燈行為;非機動車;決策樹;信號交叉口
中圖分類號:U491.4文獻標識碼:A
0引言
中國是非機動車大國,由于非機動車具備健康、經濟、環保等特點,早已成為我國重要的交通出行方式之一。與此同時,非機動車也是城市道路交通中受傷和死亡風險最高的類別之一。據我國2013年至2017年的交通事故統計,有關非機動車的城市道路交通事故發生5萬余起,造成直接財產損失1.11億元。如此高的交通事故發生率也側面凸顯了研究信號交叉口非機動性違規行為的重要性。事故分析表明,闖紅燈是非機動性騎行者中最典型的違規行為之一,也是導致交通事故發生的主要原因之一。由于我國大部分非機動車騎行者法律、交通安全意識相對薄弱,導致非機動車的闖紅燈行為較為普遍,為我國城市交通帶來一些問題與隱患。基于此,結合我國當前交通現狀,研究非機動車的闖紅燈行為是十分必要的。
Pai將騎行者的交叉口通過行為分為三種不同的方式:冒險、機會主義和守法,并建立了一個混合logit模型,分析三種不同方式的穿越行為。發現紅燈時長、交叉口類型等因素顯著增加了騎行者發生危險行為的可能性。Wu對北京的交叉口進行調查研究發現,56%的非機動車發生闖紅燈行為,年齡是預測騎行者闖紅燈的重要因素,同時從眾心理也會影響騎行者面臨紅燈時的決策。Huang確定了具有代表性的行為特征(速度、交叉口間隙或滯后接受行為和群體騎行行為)來研究騎行者在信號交叉口的行為。Yu嗵過二元logit模型。分析了性別、非機動車類型、轉彎車輛數量等相關因素對有或無倒計時信號裝置的信號交叉口電動車騎行者闖紅燈行為及提前啟動行為的影響。Jahangiri A應用混合效應的廣義回歸分析發現,其他騎行者的移動和存在是影響闖紅燈概率的重要因素。Huan用生存分析方法估計電動自行車在信號交叉口等待時間的模型。引入Cox比例危險模型,將反映個人特征和交通狀況的變量定義為協變量,用以描述內外部因素的影響。Zhang通過logistic回歸分析和方差分析結果表明,遮陽板在晴天和陰天對降低闖紅燈概率均有顯著效果,并且遮陽板在晴天的效果大于陰天。評估哪些是闖紅燈行為自行車手最常見的行為和人口特征,哪些是他們在信號交叉口的行為,有助于制定更好的政策和制定適當的干預措施,以促使自行車手尊重紅燈信號,并且減少因其造成的交通事故的數量。現有研究中,很少有對騎行者的視覺搜索行為進行相關探討。因此本文在前人研究的基礎上,結合我國交通現狀,運用CHAID決策樹方法探索闖紅燈違規行為與騎行者的個人特征、穿越行為等變量之間的關系,期望可以更好地解釋上述變量如何在非機動車中普遍存在的闖紅燈現象中發揮作用。
1調查設計與實施
1.1數據收集
本文主要采取錄像拍攝收集相關樣本,通過在信號交叉口進行實地視頻拍攝,再對視頻回放提取所需要的數據。
為便于采集非機動車的穿越行為數據,在選擇交叉口調查時會遵守以下幾點原則:(1)調查地點應是典型信號控制四路交叉口;
(2)調查地點需要有較大的非機動車流量,確保收集的樣本量充足;(3)為了能清晰獲取全部所需數據,調查地點應具備良好的拍攝條件,方便擺放相機三腳架。根據上述原則,本文最終選取上海市隆昌路與長陽路交叉口、周家嘴路與雙陽路交叉口和圖們路與控江路交叉日進行實地調研。
1.2數據處理
1.2.1闖紅燈行為
為了更清楚地描述騎行者在紅燈期間到達交叉口的穿越行為,本文采用如下分類,清晰刻畫三種不同類型的穿越行為:(1)冒險主義行為:紅燈期間到達交叉口,沒有等待就直接闖紅燈;(2)機會主義行為:最初在紅燈期間等待,一段時間后仍在紅燈期間穿越交叉口;(3)守法行為:紅燈期間全程停車等待,直到綠燈期間才穿越交叉口。在回放錄像統計數據時,對變量的描述為0=守法行為;1=機會主義行為;2=冒險主義行為。
1.2.2個人特征
個人特征數據包括騎行者的性別、年齡和非機動車類型,各變量的解釋如下:
記錄非機動車騎行者的個人特征數據時,將被觀察到的騎行者的性別記錄為:1=男性;2=女性。由于數據是在調查地點實地拍攝獲得,因此騎行者年齡是通過觀察與估計來評估的。為便于感知,將年齡分為三個類別:1=0-30歲;2=31-50歲;3=50歲以上。對于非機動車的類型,將其分為電動自行車與人力自行車,變量解釋為:1=電動自行車;2=人力自行車。
1.2.3群體規模
群體規模指的是其他騎行者在交叉口等待的情況,即當騎行者紅燈期間到達交叉口時,有其他騎行者已經在等待的過程中了。該變量的解釋為:0=沒有其他騎行者;1=存在1-4名騎行者;2=存在5名以上騎行者。
1.2.4視覺搜索行為
由于本文采用的是錄像拍攝獲取相關數據,無法觀察到騎行眼球的相應運動,所以將會通過觀察采集的錄像中騎行者在到達十字路口時的頭部轉動來評估騎行者的視覺搜索行為(0=無頭部轉動;1=頭向一個方向轉動;2=頭部向兩個方向轉動)。在實際評估時,會對某些特殊情況進行相應處理,如有時騎行者頭部轉動,是因結伴出行而觀察其他同行者,因此該情況會被判定為“0”。
1.3數據分析
對收集并處理得到數據進行卡方統計分析,采用卡方檢驗來檢驗不同類型闖紅燈行為與個人特征、群體規模和視覺搜索策略之間的關系。
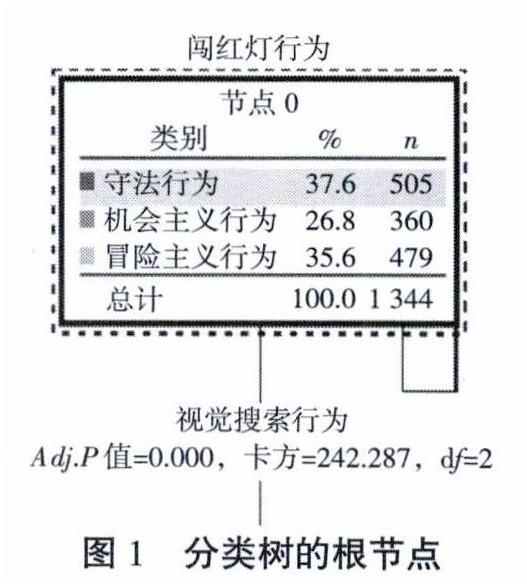
并且為了進一步分析收集的變量的作用,采取決策樹方法來分析不同闖紅燈行為的發生。決策樹是一種從無秩序、無規則的數據中推理出一套分類規則,對樣本數據進行分類的方法。對決策樹內部的節點進行屬性值的比較,并根據不同屬性值判斷從該節點向下分,在決策樹的葉節點得到結論。在決策樹中,目標變量(即闖紅燈行為)也被稱為根節點并且包含整個樣本,如圖1所示。在分裂過程中,根據選擇的目標變量識別最佳的分類方向,將父節點分裂成子節點,最后形成一個完整的樹。決策樹有助于更好地識別分組并預測結局,從而支持決策過程和風險因素分析。由于決策樹的非參數性和易于解釋的特點,決策樹在許多領域得到了廣泛的應用。在本文中使用決策樹方法來分析騎行者的闖紅燈行為,對于解釋和預測騎行者在紅燈期間到達交叉口后的穿越行為是有較大作用的。
決策樹分析基于CHAID算法,它是一種以目標變量最優為依據,能夠快速高效地挖掘數據的多元統計分析方法。CHAID算法主要根據卡方統計量尋找最佳分組變量和分割點。如果多個解釋變量與目標變量間具有顯著的關聯性,那么CHAID算法會從中挑選出最關鍵的解釋變量(P值最小)。該算法經過三個連續的階段:合并、拆分和停止。當解釋變量具有多個類別時,會對多個類別進行比較,將未顯示出差異的類別合并在一起。當決策樹達到一定規模時,需根據停止規則,阻止樹的繼續生長。采用SPSS軟件進行決策樹分析,通過CHAID算法建立了自行車闖紅燈決策的分類樹模型。
2結果分析
一共收集了1344名在紅燈期間到達交叉口的非機動車騎行者的穿越行為數據,其中505名(37.6%)騎行者為守法行為,360名(26.8%)騎行者屬于機會主義行為,479名(35.6%)騎行者被記錄為冒險主義行為。
在所有樣本中,有692名(51.5%)是男性,652名(48.5%)是女性,按性別劃分的樣本分布是均勻的。在年齡方面。收集了489名(36.4%)30歲以下的騎行者,547名(40.7%)騎行者的年齡在31-50歲之間,308名(22.9%)騎行者的年齡在50歲以上。
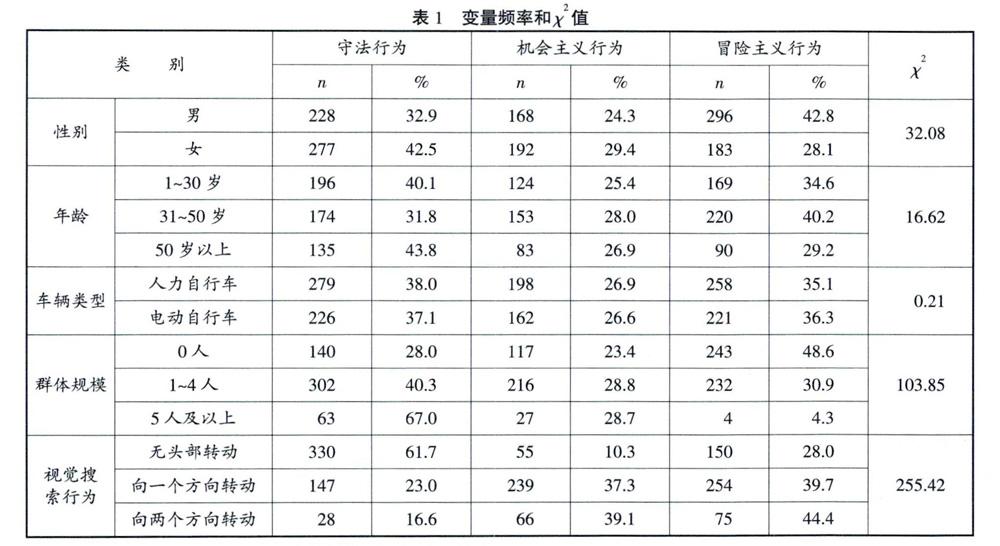
用卡方檢驗性別與闖紅燈行為之間的關系,結果顯示這兩個變量之間存在關聯,X2(2)=32.08,p<0.001。對性別進行分類比較后得出,男性冒險主義行為的傾向性更大(p<0.05),而女性更偏向于守法行為(p<0.05)。
對騎行者的年齡和闖紅燈行為之間的關系進行卡方檢驗。結果顯示兩個變量之間存在關聯,X2(4)=16.62,p<0.05。31-50歲的騎行者在紅燈期間的交叉口進行冒險主義行為(p<0.05)的可能性大于其守法行為或機會主義行為(p<0.05)。年齡在50歲以上的老年騎行者,相比于其他兩類行為,更傾向于在整個紅燈期間停車等待,即守法行為(p<0.05)。
關于騎行者的車輛類型,卡方檢驗顯示車輛類型與闖紅燈行為之間無關聯,x2(2)=0.21,p>0.05。
卡方檢驗顯示視覺搜索行為與闖紅燈行為之間有關聯,x2(4)=255.42,p<0.001。對于實施守法行為的騎行者在交叉口等待時,很大程度上只關注綠燈,所以幾乎不存在頭部的轉動,而對于機會主義行為的騎行者來說,由于要尋找闖紅燈的時機。所以將更傾向于頭部轉動看向一側或兩側。
群體規模與闖紅燈行為之間也存在關聯,x2(4)=103.85,p<0.001。當群體規模不小于5人時,騎行者更容易進行守法行為,而當周圍沒有其他人時,騎行者進行冒險主義行為的可能性更大。
如表1所示,為闖紅燈行為分類下各變量的頻率和x2值。
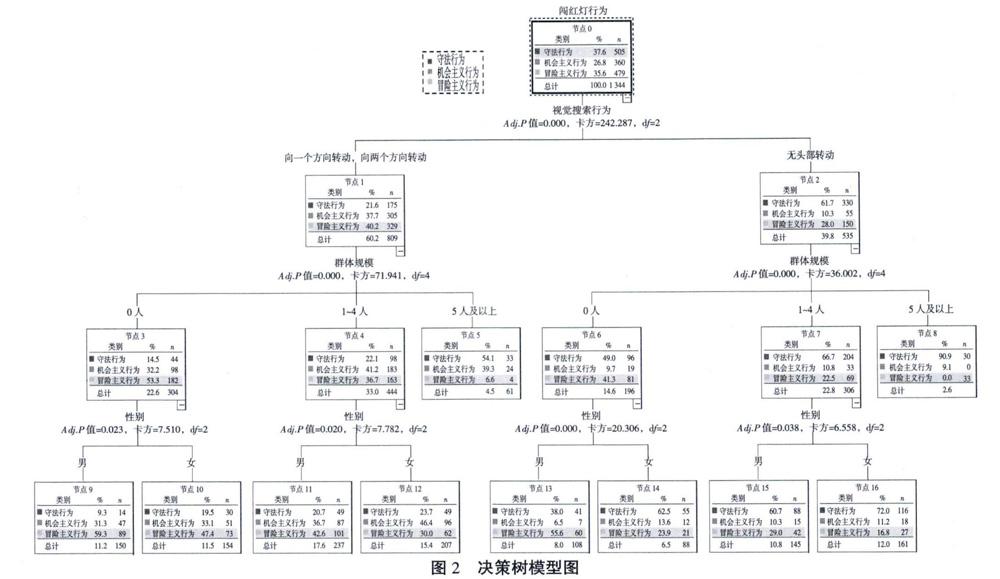
非機動車騎行者的闖紅燈行為的決策樹模型圖如圖2所示。
圖中包括10個終端節點。節點0由37.6%的守法行為騎行者、26.8%的機會主義行為騎行者以及35.6%的冒險主義行為騎行者組成,第一個最佳分割的變量為視覺搜索行為。如果騎行者在交叉口頭部轉動了一個或兩個方向,則其中21.6%的騎行者屬于守法行為,將在整個紅燈期間停止等待;37.7%的騎行者會等待一段時間后進行闖紅燈行為;40.7%的騎行者則會不等待并直接闖紅燈。相反,對于無頭部轉動的騎行者來說,存在61.7%的人屬于守法行為;機會主義行為的騎行者僅占10.3%,28.0%的騎行者進行了冒險主義行為。不過節點1和節點2的純度都不足夠,所以還需繼續分裂,直到所有的終端節點達到相應的純度。結果顯示,如果騎行者進行了視覺搜索行為且附近無其他騎行者,則他會很大程度進行冒險主義行為。
騎行者進行視覺搜索行為但附近有5人以上的其他騎行者時(節點5),他將更有可能等待到綠燈期間再穿越(54.1%)。同樣的,如果騎車人沒有進行視覺搜索行為且周圍存在5人以上的騎行者(節點8),騎行者在整個紅燈期間也更有可能停車。無論男性還是女性,在有左右的視覺搜索行為且獨自一人在交叉口時,都會大概率的實施冒險主義行為(節點9和節點10),而當附近存在1-4.個騎行者時,男性仍會傾向于不等待直接闖紅燈(42.6%),女性則有46.4%的比例會在等待一小段時間后闖紅燈(節點12)。當騎行者無視覺搜索行為時,只有當性別為男性且周圍無其他人的情況下,55.6%的騎行者會不停車直接闖紅燈,其他情況如節點14、15和16,騎行者的紅燈行為均大部分屬于守法行為。
年齡和車輛類型兩個變量沒有在決策樹中出現,因為CHAID算法在考慮這些變量時無法找到純節點。
3結論
本文研究目的為進一步了解騎行者在信號交叉口的穿越行為,分析個人特征和行為特征與闖紅燈行為的關系,運用CHAID決策樹方法進一步了解每個解釋變量在預測騎行者闖紅燈時的重要性,得到以下結論:
(1)42.77%的男性騎行者在紅燈期間傾向于不停車直接闖紅燈,女性則大多傾向于守法行為;年齡在50歲以上的騎行者在紅燈期間始終停車等待的可能性要比其他兩種行為的可能性大得多(P<0.05)。
(2)等待的其他騎行者數量越少,被觀察的騎行者闖紅燈的可能性就越大。當騎行者獨處時,他們往往會讓自己處于更大的風險之中。
(3)當騎行者進行視覺搜索行為時,闖紅燈的概率大大增加。當群體規模在5人以下時,男女騎行者大部分都選擇闖紅燈行為,尤其當男性騎行者在無其他人等待,且進行搜索行為時,闖紅燈比例達到59.3%。
