度盤式指示表自動檢測儀控制系統設計
2019-12-11 02:20:08王紅敏崔晨晨隋文濤
山東理工大學學報(自然科學版) 2019年1期
王紅敏,崔晨晨,隋文濤
(1.山東理工大學 機械工程學院, 山東 淄博 255049; 2. 中國計量大學 計量測試工程學院,浙江 杭州 310018)
度盤式指示表是長度測量中一種常用的計量器具,在生產企業及科研單位的計量部門使用頻率甚高,尤其在一些設備制造行業中,是企業保證質量和提高生產效率的關鍵。因使用頻率高,故指示表在使用過程中難免會產生誤差,為了提高度盤式指示表的檢測精度和速度,需要相應的快速檢測設備[1],本文將設計相對應的伺服控制系統,以匹配其快速高精度檢測。
1 指示表自動檢測儀伺服控制系統基本單元
伺服控制系統是指示表自動檢測儀的重要組成部分,控制系統主要由PC、運動控制及數據采集器、步進電機驅動器、步進電機、傳動機構、光柵位移傳感器、信號調理電路組成,其控制系統基本結構如圖1所示。
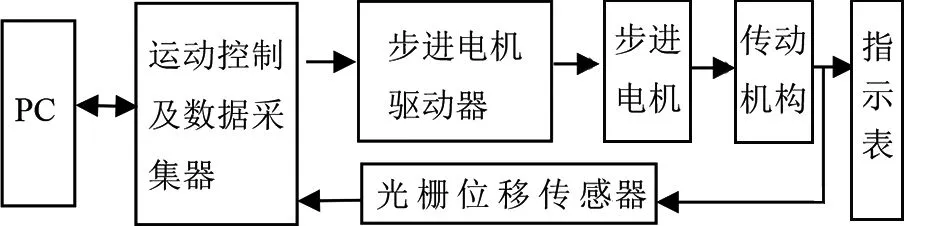
圖1 伺服控制系統結構圖Fig.1 Structure diagram of servo control system
當檢測系統工作時,首先PC通過RS232串口將控制指令發送給運動控制器,運動控制器在接收到指令后,發送相應的控制信號給步進電機驅動器,控制信號經過驅動器細分放大后,驅動步進電機執行相應的運動狀態[2-3]。步進電機通過減速裝置將作用力傳遞給滾珠絲杠,絲杠帶動與滑臺連接的測量頭對指示表進行微量進給,通過光柵位移傳感器把進給量實時反饋給運動控制器,構成閉環控制系統,由此使步進電機運動更加精準。
2 運動控制及數據采集器設計
通過對步進電機驅動器的分析,綜合考慮系統性價比、兼容性、開發難度等因素,本系統選擇意法半導體公司的STM32F103C8T6單片機作為運動控制芯片,其主要功能是負責運動控制,以及對光柵傳感器的數據進行采集,此類型的單片機具有質量好、功耗低、體積小、價格便宜、抗干擾能力強、技術成熟、環境適應能力強等特點[4-5]。
2.1 通信接口的選擇
PC與STM32之間選用RS232通訊協議,MAX232是一種把PC的串行口RS232信號電平(-10 V ,+10 V)轉換為單片機所用到的TTL信號電平(0,+5 V)的芯片。其內部具有雙組驅動器和接收芯片,完全可以滿足RS232的電平轉換要求[6-7]。RS232串行線主要在計算機與外部設備間進行數據傳送,其轉換電路如圖2所示。
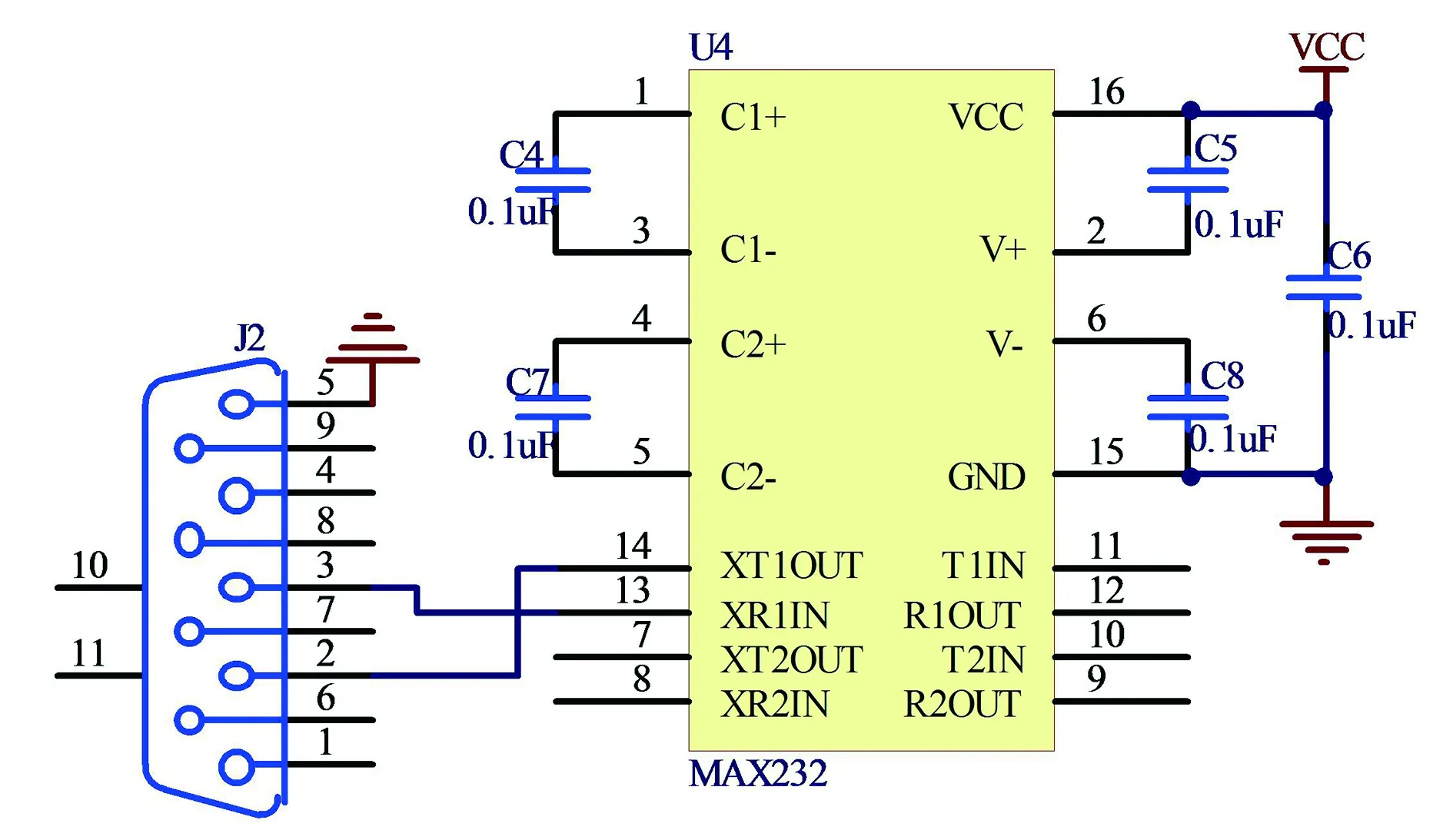
圖2 MAX232芯片電平轉換電路Fig.2 Level switching circuit of MAX232 chip
2.2 光柵位移傳感器信號調理電路設計
2.2.1 差分電路設計
差分電路主要是將光柵尺的差動輸入信號轉換成單端輸出信號,以便后面的電壓比較器使用。本電路選用INA105芯片,該芯片是精密差分放大器,不需要價格很高的電阻網路。用該芯片設計的差分放大電路具有較高的共模抑制比,可以很好地抑制零點漂移以及噪聲和干擾。其放大電路如圖3所示。
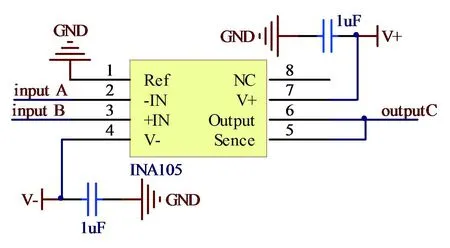
圖3 差分電路Fig.3 Differential circuit
2.2.2 電壓比較電路設計
由于本系統選用的光柵位移傳感器輸出的信號是標準的正弦信號,因此選用電壓比較電路進行轉換才能進行后續的信號處理,電壓比較電路可以把正弦信號轉換成方波信號。在本設計電路中選用MAX913芯片,MAX913是單路、高速、低功耗、具有差分輸入和互補TTL輸出的比較器,由MAX913組成的電壓比較電路如圖4所示。
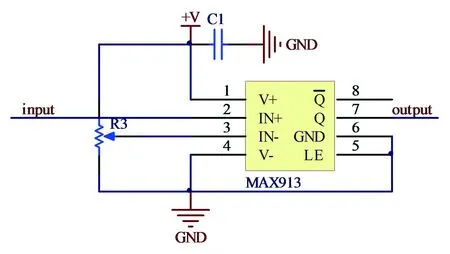
圖4 電壓比較電路Fig.4 Voltage comparator circuit
2.2.3 細分辨向電路設計
正弦信號經過電壓比較電路轉換成了方波信號,雖然能夠被單片機處理,但是為了提高位移測量的分辨力,要對整形后的方波信號進行細分處理。由于測量指示表時要進行正、反行程誤差的測量,所以需選用細分辨向電路。先由CD4013進行二細分然后與后面的四細分電路級聯構成八細分電路,通過兩路方波相位的相對導前和滯后的關系進行方向的判別,其電路如圖5所示。
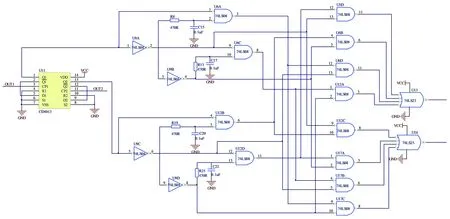
圖5 細分辨向電路Fig.5 Subdivision and direction-distinguishing circuit
2.2.4 可逆計數器設計
經過細分辨向后,需要對細分后的方波信號進行計數,才能獲得相應的位移量信息。本系統選用74LS193可逆計數器對細分后的方波信號進行計數。74LS193可逆計數器可以進行4位二進制輸出,本系統采用兩片74LS193級聯的方式,這樣最多可計255個脈沖。74LS193可逆計數器級聯電路如圖6所示。
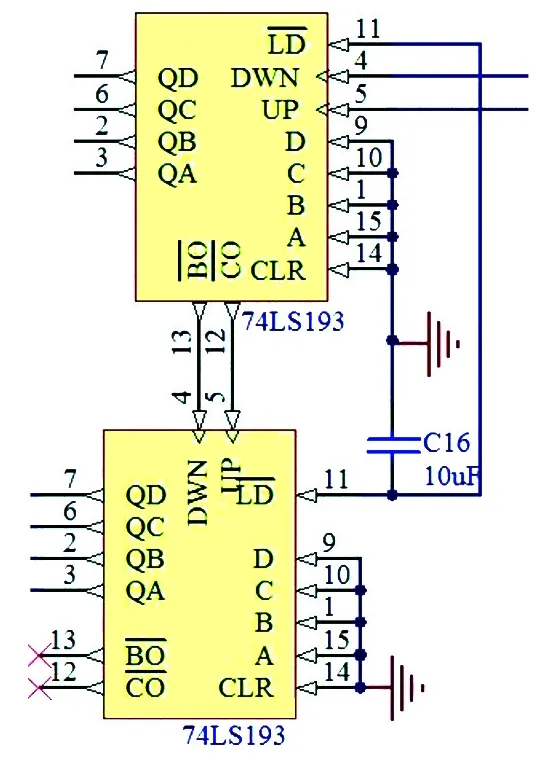
圖6 74LS193可逆計數器級聯電路Fig.6 The cascade circuit of 74LS193 reversible counter
2.2.5 數據緩沖器設計
脈沖信號經過可逆計數器后,為了保證可逆計數器傳送給STM32的數據不發生丟失,還需要經過數據緩沖器才能與STM32相連。針對本系統測量精度的要求,需選用高性能的緩沖芯片。本系統選用74LS125芯片作為數據緩沖器,74LS125是四總線數據緩沖器。因為級聯后的74LS193輸出的是8位數據,所以這里對74LS125也采用了級聯方式與74LS193進行連接。其連接后的電路如圖7所示。
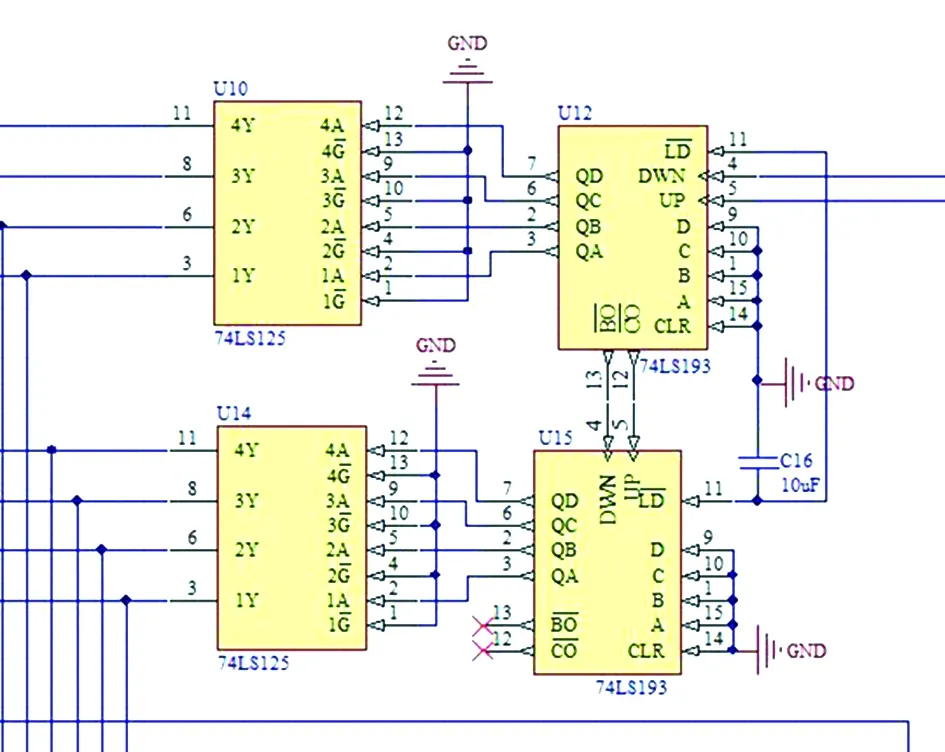
圖7 74LS193與74LS125級聯電路Fig.7 Cascade circuit for 74LS193 and 74LS125
3 步進電機驅動器設計
在考慮選擇步進電機驅動器時,要求其不僅要驅動步進電機工作,還要達到相應的細分要求,同時在盡量降低驅動器功耗的情況下,要保證功率放大器的安全運行,所以本系統選用THB6064AH二相步進電機驅動芯片。該芯片采用脈寬調制和斬波驅動方式,可以進行雙全橋MOSFET驅動,最高耐壓高達50 V,峰值電流為4.5 A,具有自動限流和半流鎖定功能,內置溫度保護及過流保護,低電壓檢測電路,可以進行8種細分方式和4種衰減方式的選擇,具有穩定性高、價格較低、外圍電路簡單等優點,因此該芯片為實現系統高性能、低成本、小型化步進電機的驅動提供了最佳方案[8-10]。THB6064AH芯片的應用電路如圖8所示。
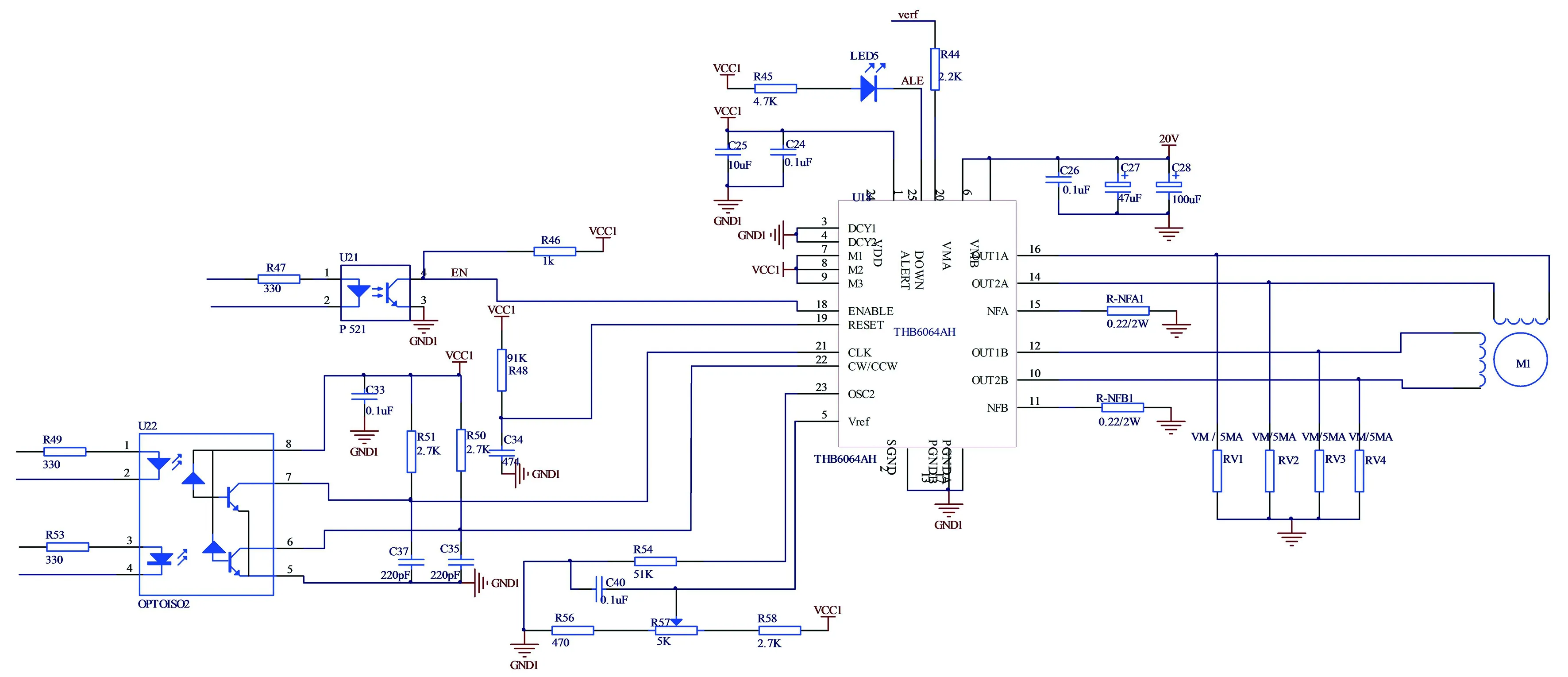
圖8 THB6064AH應用電路Fig.8 THB6064AH application circuit
4 結束語
本文對指示表自動檢測儀的伺服控制系統進行了完整的創新設計,根據系統需要設計了運動控制器,并對信號處理電路和驅動電路進行了設計,其主要創造性工作如下:(1)系統中采用高性能驅動芯片,使步進電機運行更加平穩和精準,其進給量誤差小于0.1 μm。(2)對光柵位移傳感器輸出的正弦信號進行了濾波、整形、細分辨向、計數緩沖等處理,經實際測試檢驗,該伺服控制系統的測量誤差不超過0.25 μm,與之前的指示表檢測相比較[11],大大提高了系統的測量準確度。
因此,該伺服控制系統在測量方式、分辨力和測量準確度等方面均有進一步提高,為儀表檢測提供了一種精確高效的檢測方法,對于指示表檢測儀的準確快速檢測具有重要現實意義。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
