智能車隊跟車縱向控制算法設(shè)計及仿真驗證
2019-12-17 09:23:12魏勁鵬楊杰星
重慶理工大學學報(自然科學) 2019年11期
葉 心,魏勁鵬,楊杰星, 葉 明, 呂 強
(1.重慶理工大學 a.車輛工程學院;b.汽車零部件先進制造技術(shù)教育部重點實驗室,重慶 400054;2.重慶美萬新能源汽車科技有限公司,重慶 401121)
智能汽車是一個集外部環(huán)境感知、行駛路徑?jīng)Q策、車輛輔助控制等功能于一體的綜合系統(tǒng),車輛的縱向控制技術(shù)是智能汽車最終“落地”的關(guān)鍵技術(shù)之一,目前已成為汽車領(lǐng)域研究的熱點及重點。將車輛縱向控制技術(shù)應用到智能車隊自動駕駛上,在緩解道路擁堵、保證交通安全以及駕駛節(jié)能等方面有重要意義[1]。
車輛縱向控制算法是連接上層跟車決策層和下層車輛執(zhí)行機構(gòu)的橋梁。上層控制器以車路相對位置為參照,規(guī)劃車輛的期望運動狀態(tài),如駕駛?cè)四P蚚2-3]和人工勢場法[4-5];下層控制器利用上層控制器的輸出設(shè)計車輛控制器,如LEE等[6]應用參數(shù)自整定模糊PID控制,通過模糊規(guī)則對PID的3個參數(shù)進行調(diào)節(jié),實現(xiàn)汽車縱向控制。Hedrick等[7]提出三狀態(tài)模型,忽略發(fā)動機動態(tài)特性、液力變矩器特性、輪胎滑移,以進氣量、發(fā)動機轉(zhuǎn)速和制動力矩3個狀態(tài)進行車輛控制。部分學者采用直接式控制方式[8]和分層式控制方式[9-10],建立并開發(fā)了參數(shù)自適應型速度控制策略,適用于強魯棒性控制系統(tǒng),但未考慮車輛隊列行駛時的應用。在車輛隊列控制方面,張向南等[11-13]研究了車輛隊列縱向控制的基本理論、控制方法和實驗手段,未考慮領(lǐng)航車模型,但為車輛隊列系統(tǒng)控制提供理論基礎(chǔ)和技術(shù)支撐。
本文將車輛縱向動力學建模方法、模糊智能控制應用在車隊縱向跟車控制中,建立包括領(lǐng)航車模型、車隊縱向動力學模型、跟車模型等,為達到提高車隊通行效率以及安全行駛的目的,保證車隊車輛速度差小于5 km/h,車車間距差值波動率在靠近時小于20%,遠離時小于30%,最后通過仿真分析,驗證模型和控制器的性能和可行性。
1 領(lǐng)航車縱向動力學模型及仿真分析
領(lǐng)航車是車隊中位于首位的車輛,并按照給定的城市循環(huán)工況ECE中規(guī)定的車速、加速度以及減速度的指令行駛。本節(jié)首先建立領(lǐng)航車縱向動力學建模,包括駕駛員模型、發(fā)動機模型、變速器模型、換擋模型、制動系統(tǒng)模型以及整車驅(qū)動模型,這些模型在建立過程中進行了如下假設(shè):
1) 假設(shè)在路況良好的平路上行駛,無坡度;
2) 汽車輪胎與地面有良好的接觸,并且地面有充足的附著力,不存在輪胎相對地面滑移之類的非線性因數(shù);
3) 發(fā)動機的工作狀態(tài)為理想工作狀態(tài)下的瞬態(tài)修正。
與真實的道路情況相比,ECE只對道路車速、加減速、紅綠燈等因素進行了理想的模擬,考慮真實的道路存在打滑、彎道以及通訊延遲等實際情況,為了避免車輛隊列行駛時出現(xiàn)安全隱患,在車間距保持方面引入安全系數(shù)ζ。
1.1 研究對象
車隊中的車輛全部為國產(chǎn)某車廠的同一款前置前驅(qū)AMT轎車,其整車及動力系統(tǒng)參數(shù)如表1所示。
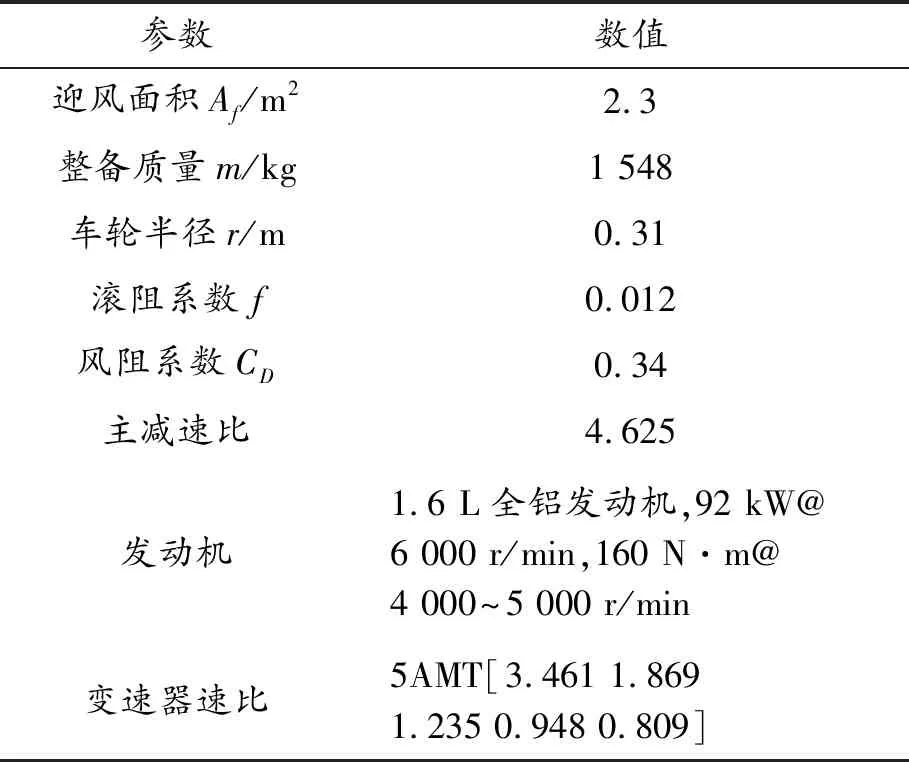
表1 整車及動力系統(tǒng)參數(shù)
1.2 領(lǐng)航車縱向動力學模型
領(lǐng)航車的縱向動力學模型,包括駕駛員模型、發(fā)動機模型、變速器模型、驅(qū)動橋模型(主減速器、差速器)以及制動系統(tǒng)模型5個部分,基于車輛動力學領(lǐng)域的研究成果以及經(jīng)驗數(shù)據(jù),各個部分通過力矩、轉(zhuǎn)速的傳遞關(guān)系連接,建立單個車輛整車縱向動力學模型,如圖1所示。
1) 駕駛員模型
駕駛員模型提供整車模型的輸入信號,包括油門踏板開度以及制動踏板開度。為了使駕駛員模型接近真實的情況,采用具有強魯棒性的模糊邏輯智能算法,通過對比實際車速與期望車速的差值,以及該差值的變化率,將車速需求轉(zhuǎn)化為油門踏板或者制動踏板的開度,建立駕駛員模型,如圖2所示。
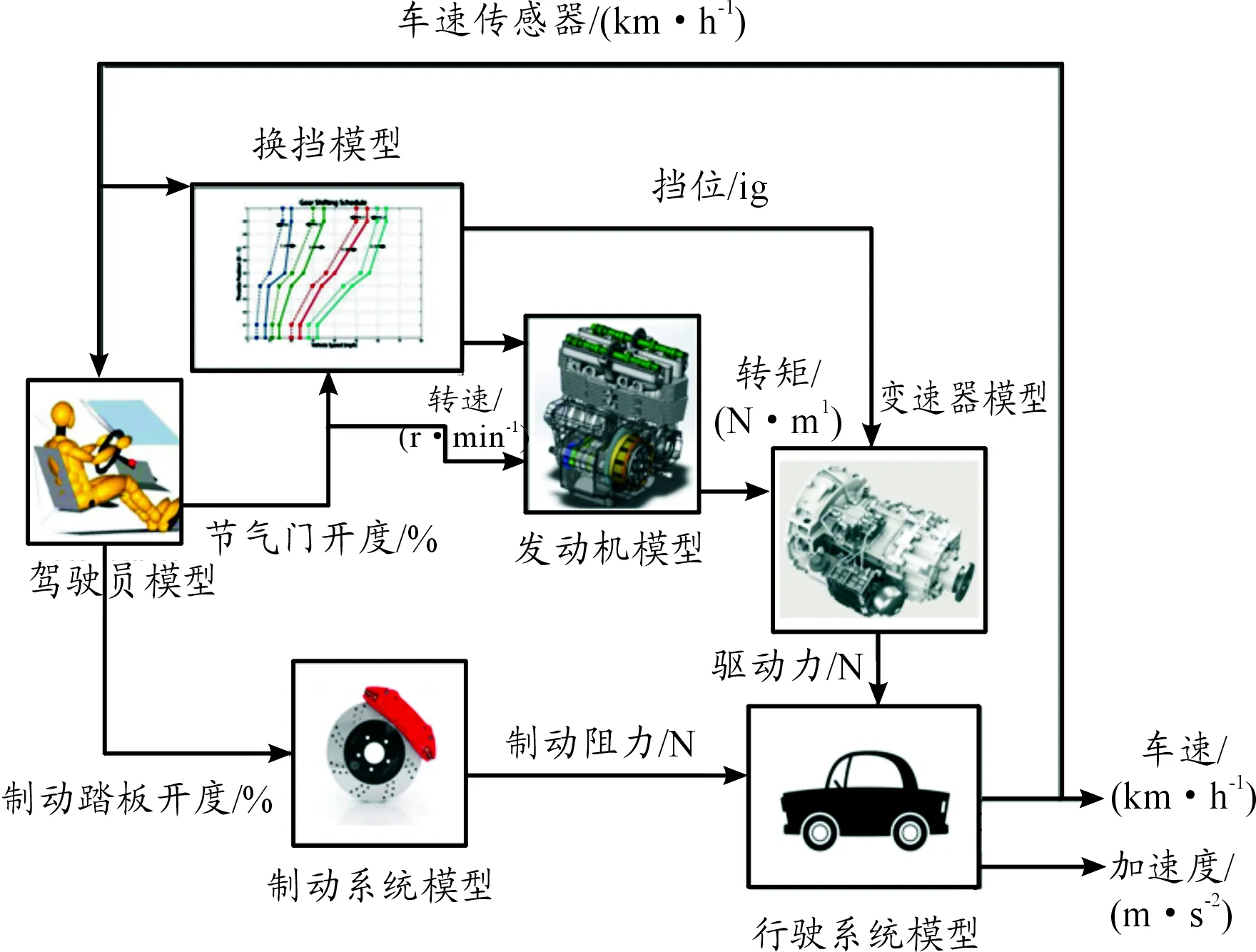
圖1 領(lǐng)航車縱向動力學系統(tǒng)模型
2) 發(fā)動機模型
由于發(fā)動機有動態(tài)工作負載,導致其常處于一種不穩(wěn)定的運行工況中。本文采用發(fā)動機穩(wěn)態(tài)數(shù)據(jù)擬合并動態(tài)修正的方法來建立發(fā)動機模型。根據(jù)內(nèi)燃機的工作原理可知,發(fā)動機所輸出的轉(zhuǎn)矩與曲軸的轉(zhuǎn)角、進入汽缸的混合氣體質(zhì)量、空燃比以及其他因素有關(guān),在進行發(fā)動機系統(tǒng)動態(tài)建模過程中,基于發(fā)動機穩(wěn)態(tài)實驗數(shù)據(jù),通過動態(tài)修正,搭建1階惰性發(fā)動機模型來補償動態(tài)誤差,如式(1)所示。
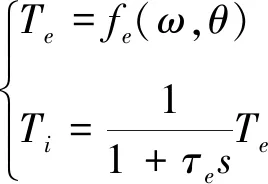
(1)
式中:Te為理想的發(fā)動機輸出轉(zhuǎn)矩(N·m);θ為油門的開度;ω為發(fā)動曲軸轉(zhuǎn)速(r/min);τe為發(fā)動機扭矩階躍響應時間常數(shù);Ti為發(fā)動機實際輸出扭矩(N·m)。
3) 變速器模型
本文研究對象為5擋AMT自動變速器,可根據(jù)當前車速和節(jié)氣門開度選擇合適擋位。變速器輸入軸與發(fā)動機輸出軸通過離合器連接起來,起到減速增矩的作用,因此自動變速器的輸出軸扭矩Tg及轉(zhuǎn)速ng計算如式(2)所示。
(2)
式中ig為當前擋位傳動比。
基于式(2)及AMT綜合性換擋規(guī)律,在Matlab/Simulink/Stateflow仿真平臺搭建變速器換擋模型,如圖3所示。

圖2 領(lǐng)航車駕駛員模型
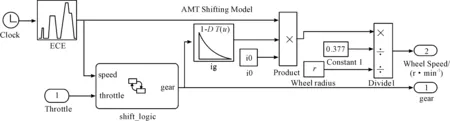
圖3 AMT換擋模型
4) 制動系統(tǒng)模型
制動系統(tǒng)模型是確保車輛按照預期的車速行駛,以及與前車保持安全距離的重要手段。駕駛員制動意圖可通過制動踏板力與期望制動減速度關(guān)系來表示,制動踏板力與期望制動減速度之間的關(guān)系如式(3)所示。

(3)
式中:Fb為估算出的制動踏板力(N);Pm、Am分別為人力制動主缸的壓力(Pa)及活塞有效面積(m2);Ks為彈簧剛度(N·m-1);Rpedal為制動踏板杠桿比;Pb為制動踏板位移(m),一般可以通過實車場地實驗的數(shù)據(jù)擬合等獲得。
5) 車輛行駛系統(tǒng)模型
假定車輛在良好路面行駛,且只考慮汽車的縱向受力情況,汽車行駛系統(tǒng)承受來自傳動系統(tǒng)輸出的轉(zhuǎn)矩轉(zhuǎn)化的驅(qū)動力Fx、空氣阻力Fw、滾動阻力Ff、加速阻力Fj以及制動阻力Fb,汽車受力平衡如圖4所示。
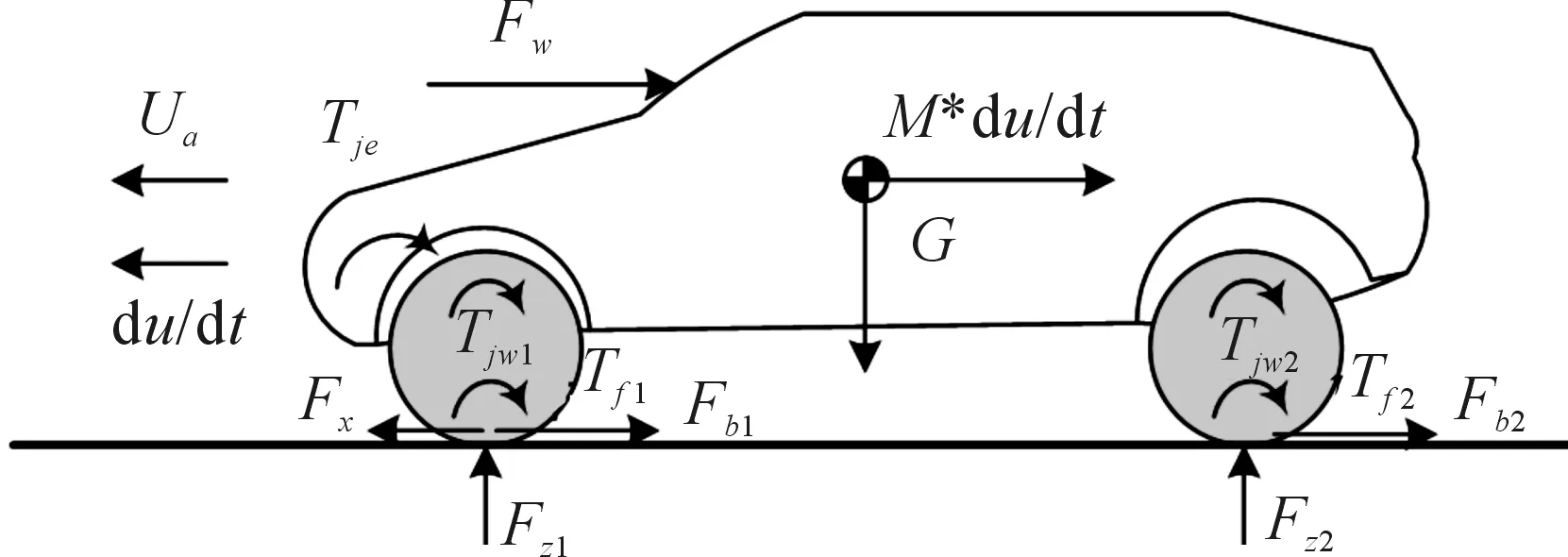
圖4 汽車受力平衡圖
根據(jù)圖4,得到汽車在行進過程中的受力平衡方程式:
Fx=Fw+Ff+Fb+Fj
(4)

(5)
式中:δ為汽車的旋轉(zhuǎn)質(zhì)量轉(zhuǎn)換系數(shù)(根據(jù)經(jīng)驗數(shù)據(jù)δ>1,且在1.1~1.4之間,本文研究對象為C級轎車,故δ=1.3);ρ為空氣密度(g/cm3);CD為空氣阻力系數(shù);Af為迎風面積(m2);Vi為第i輛車的縱向速度(km/h),忽略風速;Td為車輪處驅(qū)動轉(zhuǎn)矩(N·m);Te為發(fā)動機飛輪處輸出轉(zhuǎn)矩(N·m);m為汽車質(zhì)量(kg);f為道路摩擦因數(shù);du/dt為車輛縱向加速度(m/s2);r為車輪半徑(m);i0為主減速器傳動比;ig為變速器當前工作檔位速比;ητ為傳動系傳動效率。
1.3 領(lǐng)航車駕駛模型仿真分析
基于Matlab/Simulink/Stateflow仿真平臺,對上述小節(jié)中的領(lǐng)航車模型進行仿真分析,以ECE道路循環(huán)工況為目標車速,仿真結(jié)果如圖5所示。

圖5 領(lǐng)航車行駛車速與ECE車速對比
圖5中,虛線為ECE道路循環(huán)工況目標車速,實線為領(lǐng)航車的實際車速。通過仿真結(jié)果可知,領(lǐng)航車行駛車速與ECE循環(huán)工況的車速最大差值不超過2 km/h,較好地實現(xiàn)了領(lǐng)航車按照預定的車速,加速、減速行駛要求的目的。
2 智能車隊跟隨控制器設(shè)計及仿真分析
車輛的隊列行駛是指2輛以上的汽車,在以相同的車速行駛的基礎(chǔ)上,兩兩車輛之間按相近的車間距離保持有序行進的方式,可以確保交通安全,提高交通通行率。
傳統(tǒng)車隊間車距控制取決于駕駛員豐富的經(jīng)驗以及熟練的車輛控制技能,以確保車輛間的相對距離以及行駛的車速,而智能車車隊通過先進的傳感器(機器視覺、磁、雷達)來感知和獲取前方車輛的距離以及速度。本文根據(jù)該信號建立車隊跟隨控制器,確保車輛與車輛之間的安全距離,使其構(gòu)成一個不可分割的整體,如圖6所示。
假設(shè)車身長度均為L,Sdk為第k-1輛車與第k輛車之間的允許安全車距,Sdk+1為第k輛車與第k+1輛車之間的允許安全車距。ua和α為領(lǐng)航車車速和加速度,uak和αk為第k輛車的車速與加速度,uak+1和αk+1為第k+1輛車的車速和加速度。

圖6 車輛隊列行駛簡易模型圖
2.1 車間間距的控制策略
合理控制車車間距是車隊按一定通行率安全行駛的保障。目前,車距算法可分為固定間距算法和可變間距算法,后者又可分為固定車頭時距算法和可變車頭時距算法[14-15]。本文從安全角度出發(fā)采用可變車頭時距法,考慮以下幾種影響因素:① 所確定的車車間距必須考慮車隊當前車速、最大制動減速度等因素;② 兼顧車輛隊列行駛的穩(wěn)定性和交通的通暢性,密度合理,不會造成交通擁堵。
領(lǐng)航車按照給定的ECE城市工況為目標車速行駛,跟隨車輛則根據(jù)前車的車速以及車輛間的相對距離來控制本車的車速,使得前后車輛車速相近,為了保持車輛隊列行駛時的穩(wěn)定性,要求車車間距的波動率在遠離時不超過30%。由于汽車的縱向動力學模型存在很多的不確定性以及非線性因素,本文基于強魯棒性的智能模糊控制方法,建立車隊中各個車輛的跟隨控制算法,以實現(xiàn)車輛隊列行駛中車車間距的保持,詳見2.2節(jié)。
另外,車車間距控制策略中被控對象車距的確定對車隊穩(wěn)定性有重要影響,考慮到智能車隊車車之間有通訊,因此車車之間的安全距離與當前車速和加/減速度有關(guān)系,上述三者之間關(guān)系如式(6)所示。車速越大,安全距離越大;加速度越大,安全距離越大;減速度越大,安全距離越小。
Sdk=f(uak,αk)=tuak+ξdbk
(6)

考慮到道路模型的復雜性,隊列中第k輛車與前車的實際距離可定義為:
di=Sdk+L
(7)
2.2 基于模糊智能控制的智能汽車跟隨模型
針對非線性控制系統(tǒng),模糊控制策略有良好的魯棒性,因此根據(jù)上述智能汽車車隊的車車間距以及車速控制策略,建立智能車隊跟隨模型。把車速差(Δu)以及距離差(Δd)作為跟隨控制器的輸入,油門踏板開度以及制動踏板開度作為該控制器的輸出。
1) 模糊智能控制器輸入輸出量以及隸屬度函數(shù)的選擇
根據(jù)輸入量的特性,其隸屬函數(shù)選擇的是控制效率高、變化快的三角形隸屬函數(shù)。經(jīng)過多次調(diào)試模型,最終確定了車速差Δu(前一輛車的車速與后一輛車的車速的差值)最佳的論域范圍[-1 1],其模糊子集分為7級,分別為:正大(PB)、正中(PM)、正小(PS)、零(Z)、負小(NS)、負中(NM)、負大(NP)。同理,經(jīng)過調(diào)試,距離差Δd(前一輛車的車頭到后一輛車車頭的距離)的論域為[0 1],模糊子集分為4級,分別是:危險(N)、小(S)、中(M)、大(B)。該控制器的輸出分別為油門踏板開度和制動踏板開度,論域為[-1 1],它們的模糊子集分為7級,分別是:正大(PB)、正中(PM)、正小(PS)、零(Z)、負小(NS)、負中(NM)、負大(NP)。當輸出值范圍為(0.1,1],表明油門踏板信號輸出,當輸出值范圍為[-1,-0.1),則表明制動踏板信號接入。考慮到減小油門和制動之間的切換次數(shù),當輸出值為[-0.1,0.1]時,則表明踏板維持原來的狀態(tài)。考慮到輸入輸出量的特點,在模糊子集范圍內(nèi),無明顯峰值,因此選擇正態(tài)分布型隸屬函數(shù)。
2) 模糊智能控制器控制規(guī)則
根據(jù)本文2.1節(jié)對跟車控制策略的描述,采用Mamdani’S(min-max)決策法,建立跟隨模型的控制規(guī)則,如表2所示。
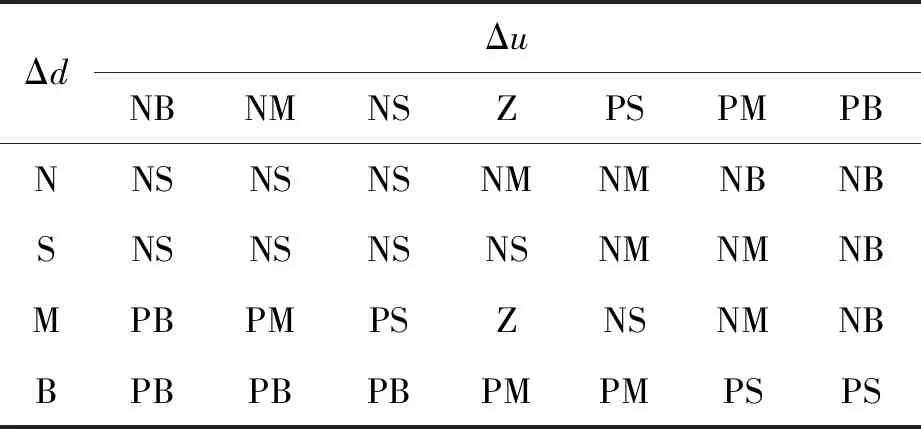
表2 規(guī)則變化
3 基于Matlab/Simulink/Stateflow建模以及仿真分析
3.1 智能車隊跟隨模型
基于上述對領(lǐng)航車的模型和跟車模型的分析,基于Matlab/Simulink仿真平臺下,搭建了有3輛車所組成的隊列行駛模型,如圖7所示。
本研究是由3輛同一款式的汽車構(gòu)成的車隊,其中領(lǐng)航車的駕駛員模型是根據(jù)自身的車速與目標車速的差值,以及差值的變化率,通過智能模糊控制方法(詳見第1節(jié)的結(jié)論)來判斷領(lǐng)航車的加速程度或者制動大小。1號跟隨車的駕駛員模型則需根據(jù)和領(lǐng)航車的速度差值以及和領(lǐng)航車的位移差值來判斷1號跟隨車的油門和制動踏板開度,1號跟隨車跟車模型如圖8所示。同理,2號跟隨車則是根據(jù)和1號跟隨車的相對速度以及相對距離來控制2號跟隨車的油門以及制動踏板的開度。

圖7 智能車隊跟隨模型

圖8 跟隨車駕駛員模型
3.2 仿真結(jié)果分析
在Matlab/Simulink搭建好模型后,車隊各個車輛之間車頭與車頭之間的初始間距為15 m,根據(jù)式(6)可知,車隊之間的安全距離隨著車速的增加而增加。領(lǐng)航車以ECE城市道路巡航工況的目標車速起步,ECE循環(huán)工況仿真時長為196 s。
車隊中各個車輛行駛速度隨時間的變化如圖9所示,圖中實線為領(lǐng)航車車速變化趨勢,點線為1號跟隨車車速變化情況,虛線為2號跟隨車車速變化情況。
分析圖9可知,車輛行駛速度變化曲線相似,2號跟隨車在某些時間節(jié)點出現(xiàn)了速度差異,分別是30、90、161.32和181.96 s,將該時間節(jié)點的車速進行對比,如表3所示。

圖9 隊列行駛車輛的速度變化
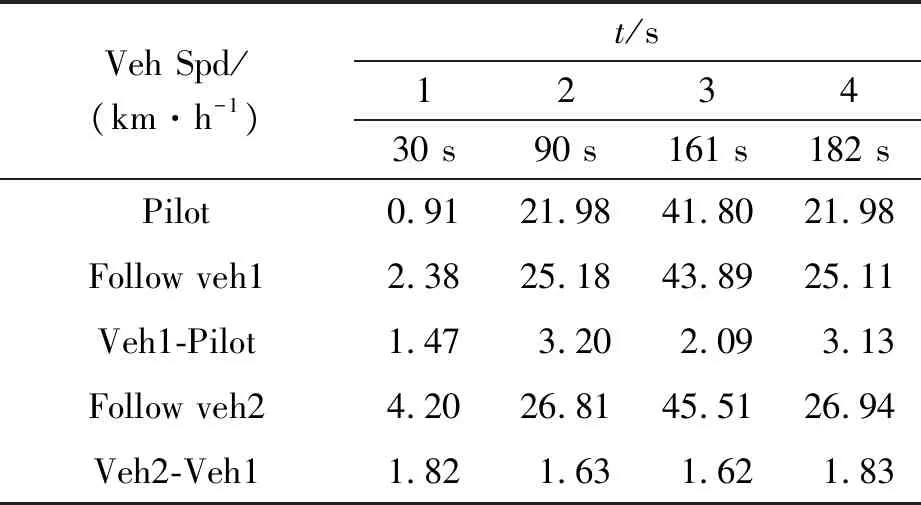
表3 車隊行駛特殊節(jié)點速度對比
通過表3的數(shù)據(jù)分析可知,在ECE城市道路循環(huán)工況下,最大車速差為3.2 km/h,小于車隊行駛車速差的要求,符合車輛隊列行駛的跟車車速目標范圍。
智能車隊在t=0時刻,各個車車頭間距以15 m為安全距離,在經(jīng)過ECE城市道路循環(huán)工況后,每輛車行駛距離隨時間的變化如圖10所示,圖中實線、點線和虛線分別為領(lǐng)航車、1號跟隨車、2號跟隨車的行駛距離變化曲線,可知在ECE城市道路工況下,車隊中的各個車輛間距保持較為一致,滿足了車隊通行效率的要求,其中在98.2、100、118、144.7 、190.2和191 s時間節(jié)點車車間距值較大。
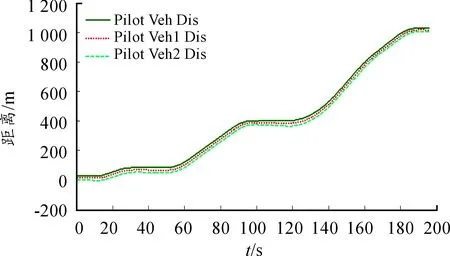
圖10 隊列行駛車輛的距離變化
記錄3輛車在上述6個節(jié)點所對應的行駛距離,詳細變化如表4所示。
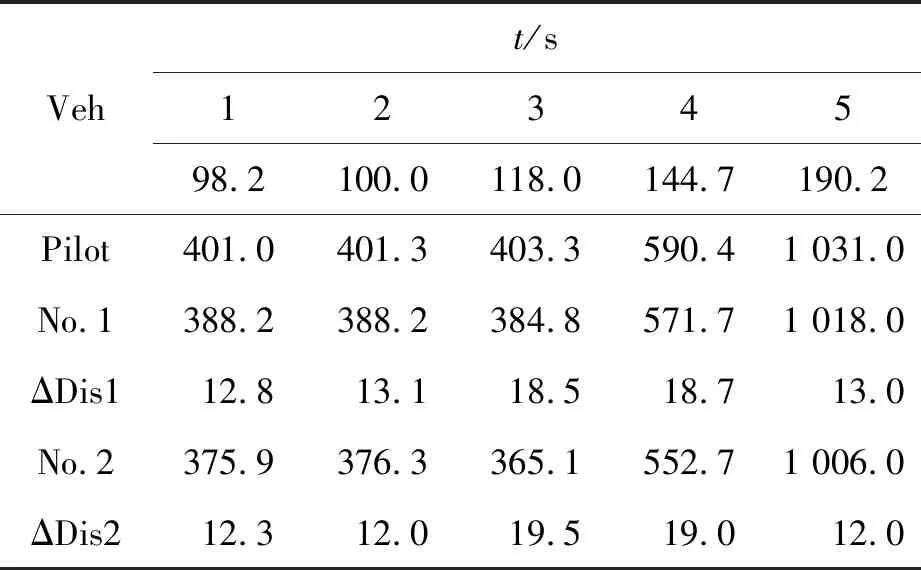
表4 隊列行駛車輛的距離(d)變化
表4中,ΔDis1代表領(lǐng)航車與1號跟隨車之間的距離差,ΔDis2代表1、2號跟隨車之間的距離差值。在ECE道路循環(huán)過程中,在98、100、190 s時刻,車隊兩兩車頭間距均有所減小,最近的情況保持在12 m。在118 s和114.7 s時刻,車車間距有所增加,最大車距保持在19.5 m。為了更好地描述車隊間距保持情況,計算了車車間距波動率,如表5所示。
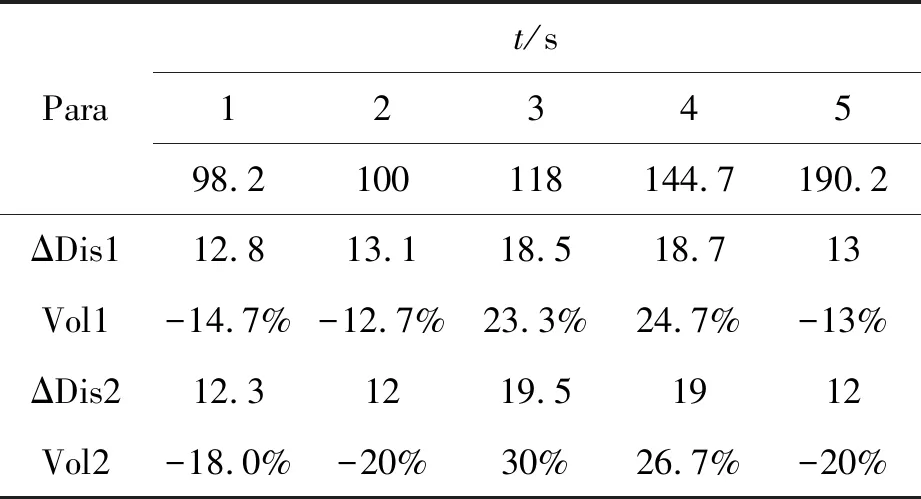
表5 隊列行駛車輛的距離(d)波動率
表5中,Vol1代表的是領(lǐng)航車與1號跟隨車間距的波動情況,Vol2代表的是1、2號跟隨車間距的波動情況,負值代表車車間距在靠近程度,正值代表車車間距在增加程度。
由表5可知,在ECE循環(huán)工況下,車車間距在靠近時的最大波動率為20%,在遠離時的最大波動率為30%,均小于或等于目標值,滿足車隊行駛時車車間距的要求。
4 結(jié)論
為了提高車隊行駛過程的安全和通行率,本文建立了車隊車輛跟隨模糊控制器、領(lǐng)航車駕駛模糊控制模型以及換擋模型模糊控制模型,并完成車隊縱向動力學建模,在給定的ECE城市道路循環(huán)工況下,基于Matlab/Simulink/Stateflow仿真平臺,對其進行了仿真分析,結(jié)果可知,車隊中的車輛行駛速度與領(lǐng)航車車速誤差值為3.2 km/h,行駛中各車間的距離保持在安全距離,在12~19.5 m。從仿真結(jié)果來看,2號跟隨車車速與1號跟隨車存在差值的原因有以下幾點:① 道路模型、車輛各系統(tǒng)模型的建立是采用的理想化的模型;② 模糊邏輯控制策略依賴大量的經(jīng)驗數(shù)據(jù)進行決策判斷,因此會導致結(jié)果誤差;③ 系統(tǒng)響應滯后,造成跟車反應遲滯;④ 未控制油門變化率,未考慮車輛隊列行駛時的能耗優(yōu)化。
基于以上分析,后續(xù)研究工作開展方向為:① 本次設(shè)計中未考慮復雜的實際環(huán)境以及非線性的動態(tài)特性,未來可以考慮。② 未來可以考慮深度學習等控制方法。③ 下一步針對混合動力汽車車隊能耗、通過率以及安全性綜合研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
車主之友(2022年6期)2023-01-30 07:58:16
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車實用技術(shù)(2019年17期)2019-09-21 03:46:32
黃河之聲(2017年13期)2017-01-28 13:30:17
教育界·下旬(2016年4期)2016-11-19 22:15:52
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03