一種基于遷徙策略的自適應粒子群算法
2019-12-17 09:23:22張紅民巴忠鐳孫成勝
重慶理工大學學報(自然科學) 2019年11期
張紅民,巴忠鐳,王 艷,孫成勝
(重慶理工大學 a.電氣與電子工程學院; b.計算機科學與工程學院, 重慶 400054)
室外光伏陣列系統經過一段時間運行后,其表面會逐漸積聚灰塵。灰塵的覆蓋影響光伏組件前蓋玻璃的透光率,使被遮擋的部分接收光照強度減弱,造成局部陰影問題[1]。此時,光伏陣列的P-U曲線會由單峰特性變為多峰特性。傳統的最大功率點跟蹤算法(MPPT)如擾動觀察法、電導增量法此時容易陷入局部極值點,無法追蹤到真正的最大功率點[2]。針對這一問題,國內外學者提出了一些多峰MPPT算法。文獻[4]將模糊邏輯控制器與擾動觀察法結合,該算法可以降低搜索過程中的功率波動,但存在求解精度不足等問題。文獻[5]研究了粒子群算法(PSO)在MPPT中的應用,PSO作為一種仿生算法,雖擁有較好的全局搜索能力,但存在收斂速度慢、精度不高、搜索早期容易陷入局部最優區域特點。文獻[6]提出了基于自適應權重的粒子群算法,在運算過程中引入非線性動態慣性權重系數,有效地改善了系統在最大功率點附近的振蕩現象,具有較強的魯棒性,但能否應用于復雜結構的光伏陣列還需進一步研究。為解決粒子群算法尋優的不穩定問題,本文提出一種基于遷徙策略的自適應粒子群算法,其核心思想是對標準粒子群算法進行改進,在迭代過程中引入自適應系數和遷徙策略。仿真分析表明:改進后的粒子群算法得到的結果波動小,追蹤到的功率精度更高。
1 局部陰影下光伏陣列特性分析
一般情況下,實際運行的光伏陣列由多個光伏組件串聯,輸出功率為所有組件輸出功率之和,輸出電流相同。當某一塊光伏組件表面有灰塵沉積時,其所帶來的局部陰影會使光伏組件輸出電流下降,輸出功率不平衡且出現多個極值點。
為驗證局部陰影對光伏陣列輸出功率及電流的影響,以3個光伏組件串聯的光伏陣列為例,單個光伏組件參數如下:開路電壓Uoc=39.6 V,短路電流Isc=9.21 A,最大功率點電壓Ump=31.7 V,最大功率點電流Imp=8.68 A,最大輸出功率UMPP=275 W,參考溫度為25 ℃,參考光照為1 000 W/m2。分別在不同光照強度下進行仿真,3種光照狀態如表1所示,光伏陣列仿真輸出結果如圖1所示。
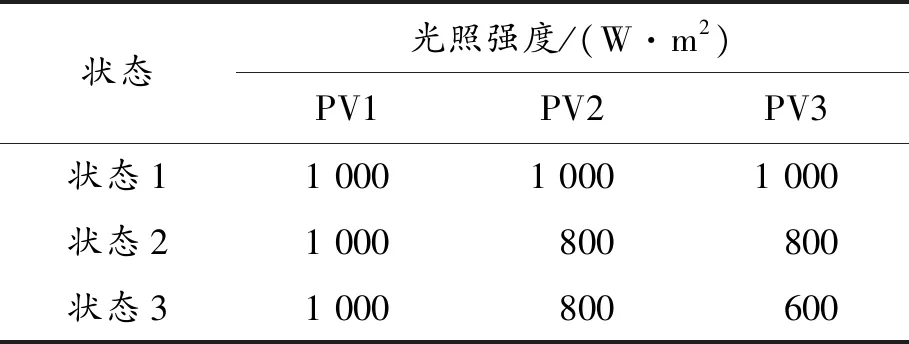
表1 光照狀態
由圖1(a)(b)可知:當光伏陣列接收的光照強度相同時,P-U特性曲線及I-U特性曲線均為單峰值狀,僅存在1個最大功率點。在光照狀態2和3時,光伏組件的輸出功率和輸出電流均會降低,且曲線呈多峰值狀。狀態2下的P-U曲線出現2個峰值,狀態3下的P-U曲線出現3個峰值,造成輸出功率出現3個極值點。由此可知,當出現n種不同程度的局部陰影時,光伏陣列的P-U曲線也會出現n個峰值。傳統的MPPT算法面對多峰問題,難以追蹤到全局最大功率點,時常陷入局部最優,因此需要新的MPPT方法進行尋優。

圖1 光伏陣列仿真輸出特性曲線
2 基于遷徙策略的自適應粒子群算法
2.1 標準粒子群算法(PSO)
PSO算法是由Kennedy和Eberhart通過觀察鳥類覓食行為提出的一種全局搜索算法。算法隨機初始化一群粒子,賦予每個粒子1個隨機速度與隨機位置,每個粒子代表1個隨機解,經過迭代找出最優解。迭代過程中,每個粒子通過跟蹤個體極值與全局極值來完成更新。標準粒子群算法描述如下:
(1)

(2)
式中:k為迭代次數;ω為慣性權重;v為粒子速度;c1、c2為學習因子;r1、r2為0,1之間的隨機數;Pid為個體極值;Ggd為全局極值;X為粒子位置。
標準粒子群算法存在著很多缺陷,如對環境的變化不敏感,常常會受到個體極值和全局極值的影響而陷入非最優區域,算法經常會發生早熟收斂等現象。針對上述問題,本文對算法的權重系數和慣性因子進行了改進,同時引入遷徙策略,提升算法的全局搜索能力。
2.2 自適應粒子群算法
PSO算法的速度迭代公式中存在3個參數:慣性權重ω、學習因子c1、c2。慣性權重決定了粒子先前的飛行速度對當前飛行速度的影響,適當的慣性權重可以平衡全局搜索和局部搜索能力。迭代初期采取較大的慣性權重增強全局搜索能力,迭代末期采用較小的慣性權重增強局部搜索能力。遞減權值可分為線性遞減與非線性遞減,線性遞減策略由于簡單直觀、收斂速度快和易于實現,采用較多。因此本文采取的是線性遞減權值策略,隨著迭代次數的增加,慣性權重系數ω逐漸減小,其形式為
(3)
式中:ωstart為慣性權重初始值,也是最大值;ωend為迭代結束時的慣性權重值,也是最小值;k為當前迭代次數,為最大迭代次數。
在PSO算法中,學習因子c1、c2分別代表了粒子的自我認識和社會認知,使粒子具備了自我總結和向優秀個體學習的能力。設置較大或較小的c1、c2值都不利于粒子的搜索。搜索前期粒子應注重自我認知,搜索末期粒子需要更關注社會信息。c1值在迭代中應由大到小,c2值則與之相反。本文據此設置學習因子為:
c1=2-sin((t*pi)/tmax)
(4)
c2=1+sin((t*pi)/tmax)
(5)
式中:t為當前迭代次數;tmax為最大迭代次數。改進后的速度迭代公式為

(6)
與標準粒子群算法相比,自適應粒子群算法的速度公式做到了隨迭代次數變化而變化,其全局搜索能力有所提高,但面對一些復雜的多峰值函數曲線尋優問題時(例如局部陰影造成的光伏陣列輸出特性曲線上出現多個峰值時),IPSO算法仍存在一些瑕疵,算法的跟蹤精度不足、收斂速度慢等。光伏陣列在局部陰影的影響下,其非線性輸出曲線會更加復雜多變,多個峰值的出現加大了全局尋優的困難,PSO和IPSO算法都會出現粒子早熟現象,跟蹤陷入局部最優造成功率損失。
2.3 基于遷徙策略的自適應粒子群算法
PSO和IPSO算法中粒子種群的多樣性直接影響算法早熟收斂及陷入局部極值的風險。算法在每次迭代時粒子都會參考自身的歷史最優位置與群體最優位置,這種影響會使種群多樣性在早期過快下降,算法陷入非最優區域。為了提高早期種群多樣性,本文改進的算法在初期將n個粒子隨機劃分成s個子群,每個子群獨立演化過程中采用了自適應系數,同時用評價算子P來判斷子種群的多樣性。
遷徙操作評價算子為
P=fitness(tbest)-fitness((t-1)best)
(7)
式中:t為迭代次數;fitness(t)為第t代子種群中最優個體適應度值,t>1。P值與子種群多樣性呈正相關性,P值越大,子種群中個體多樣性越高,不需要進行遷徙操作。若連續5代評價算子均小于臨界值,則認為粒子發生早熟收斂現象,需進行遷徙操作,從預先設定的最優個體緩沖區中隨機選擇最優個體替代已發生收斂早熟的粒子。
在遷徙策略中,粒子群的遷徙滿足如下條件:① 互斥,每個子種群會被隨機分派一個索引,索引的互斥可以保證遷徙發生在不同子種群之間;② 移動,在種群更新的過程中,一些粒子要離開子種群,另外一些粒子要加入子種群,每個子種群粒子的數目在遷徙過程中是固定不變的。
在對子種群的數量進行設置時,應保持每個子群中的粒子數量維持在6~15個。設置子種群數量過少會造成每個子種群中粒子數少,內部信息交流困難;設置子種群數量過多,會造成遷徙過程緩慢,影響算法的收斂速度。
基于遷徙策略的自適應粒子群算法的流程如圖2所示,描述如下:
步驟1初始化粒子群,隨機生成所有粒子的速度與位置,劃分子種群,種群規模s=mn,m為劃分的子種群的個數,n為子種群包含的粒子數量;
步驟2更新慣性權重系數ω和學習因子c1、c2;
步驟3評價每一個粒子,找出每個粒子的個體極值Pid和群體極值Gid;
步驟4更新粒子個體極值與全局極值;
步驟5判斷評價算子P是否小于臨界值,若大于臨界值,則繼續執行步驟2;若連續5代均小于臨界值,則執行遷徙操作;
步驟6判斷是否滿足算法結束條件,若滿足,輸出最終結果;若不滿足,轉步驟2。
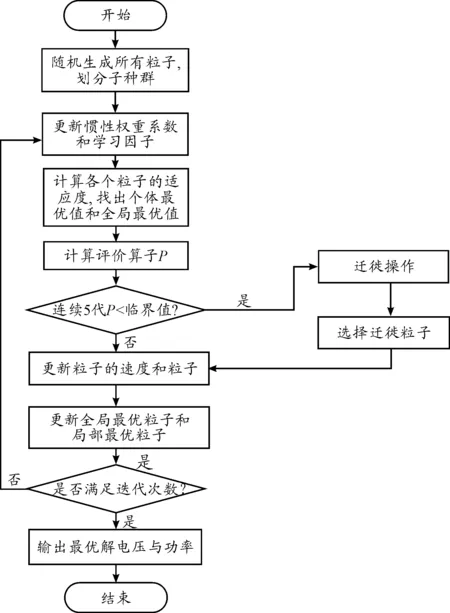
圖2 遷徙策略粒子群算法流程
2.4 算法測試
為驗證本文提出的MIPSO算法性能,將其與標準PSO算法、IPSO算法進行對比。以局部陰影下的光伏陣列輸出功率為目標函數,進行尋優測試實驗。光伏陣列由3塊光伏組件串聯組成,每塊光伏組件上接收的光照不相同,得到其功率輸出曲線如圖3。圖3曲線中存在1個全局極值點,2個局部極值點。
PSO參數設置如下:PSO算法的參數設置如下:慣性權重ω=0.9,學習因子c1=c2=1,粒子總數量num=40,最大迭代次數gen=100;IPSO算法參數設置如下:慣性權重0.9遞減到0.4,學習因子c1由2遞減到1,學習因子c2由1遞增到2,粒子數量和迭代次數與PSO算法一致;MIPSO算法參數設置如下:子種群個數l=5,遷徙率r=0.3,評價算子臨界值P=1,其余參數與IPSO算法一致。
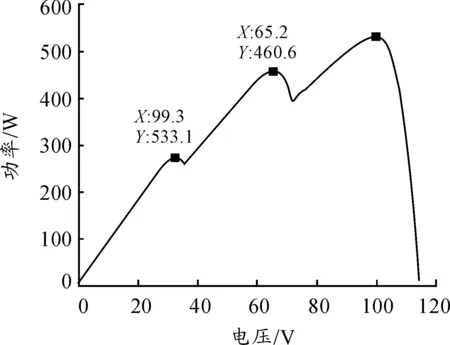
圖3 光伏陣列P-U輸出特性
分別進行100次重復實驗,統計3種算法尋找到極值點,算法結果統計與比較見表2。
觀察表2發現:MIPSO算法找到的最優值為533.141 7,最劣值為533.100 8,兩者的誤差為0.040 9,找到全局極值點的成功率為100%,所有測試結果均成功跳出了局部極值點。IPSO算法找到的最優值為533.141 7,最劣值為460.616 2,該點為局部極值點,其找到全局極值點的成功率為90%,PSO算法找到的最優值和最劣值與IPSO算法測試結果一致,但PSO算法找到的結果有18%的幾率會是局部極值點,是3種算法中跳出局部能力最弱的。以上結果表明:MIPSO算法在尋找全局極值的能力上優于其余兩種算法,跳出局部極值能力強。

表2 算法結果統計與比較
3 仿真結果與分析
基于上述分析,在Matlab中搭建多峰MPPT仿真模型,仿真模型包括由3塊光伏組件串聯組成的光伏陣列模塊,Boost電路,PWM模塊,PI調節器。

圖4 MPPT仿真模型
由圖3可知,局部陰影下光伏組件的最大輸出功率為533.1W。采用標準粒子群算法(PSO)和遷徙策略自適應粒子群算法(MIPSO)跟蹤結果分別如圖5、6所示。

圖5 標準粒子群算法追蹤結果
由圖5可以看出:標準粒子群算法在0.6 s追蹤到最大功率,系統最大輸出功率為529.8 W,與理想的最大功率533.1 W相比,功率減少3.3 W,有輕微能量損失,且追蹤過程中輸出功率波動大。而采用遷徙策略自適應粒子群算法時,觀察圖6可知,算法在0.38 s時達到穩定狀態,相比于標準粒子群算法,追蹤時間提高了36.6%,而且追蹤到的最大功率與理論最大功率無差別,功率追蹤曲線振蕩小,輸出波形平穩。

圖6 遷徙策略粒子群算法追蹤結果
由于外界環境復雜多變,導致光伏系統日常運行中所受的陰影條件時刻發生著變化,因此十分有必要對動態陰影下的光伏MPPT進行研究。為此本文設置的動態局部陰影條件如下:在初始時刻,3塊光伏陣列中PV1和PV2接收的光照強度均為1 000 W/m2,PV3為600 W/m2。1.5s時光照突變,PV2接收的光照強度由1 000 W/m2變為800 W/m2。系統檢測到光照突變,算法重啟。經過0.36 s后重新追蹤到新的最大功率點為533.1 W,與理論分析的最大功率相差不大,可見改進后的粒子群算法在動態陰影下也具有良好的效果。圖7為基于遷徙策略的粒子群算法面對陰影突變情況下的跟蹤結果。
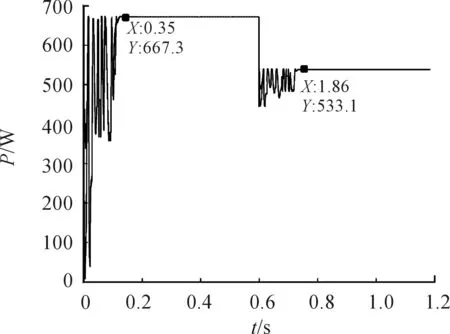
圖7 動態陰影下的基于遷徙策略的粒子群算法
4 結論
本文首先分析了局部陰影下的光伏陣列輸出功率特性,針對標準粒子群算法面對P-U曲線多峰特性問題容易發生早熟收斂現象,提出了一種基于遷徙策略的自適應粒子群算法。算法通過評價算子和隨機遷徙解決了種群早期多樣性不足的問題,提高了算法的搜索精度,有效地避免了粒子早熟現象,通過仿真實驗分析得出如下結論:
1) 標準粒子群算法在早期容易發生收斂,無法做到全局最優,且搜索精度不高,搜索波動大;
2) 本文所提算法通過引入遷徙策略,增加了粒子早期種群的多樣性,配合自適應系數,基本不會丟失最優解,搜索過程功率波動小,無論在靜態陰影還是動態陰影條件下都能快速準確追蹤到最大功率點,提高光伏發電效率。