小型空間對(duì)接機(jī)構(gòu)設(shè)計(jì)與仿真分析
2019-12-24 07:33:00馬如奇高翔宇姜水清王友漁
載人航天 2019年6期
關(guān)鍵詞:服務(wù)設(shè)計(jì)
馬如奇,高翔宇,姜水清,白 美,王友漁,侯 亮
(北京空間飛行器總體設(shè)計(jì)部空間智能機(jī)器人系統(tǒng)技術(shù)與應(yīng)用北京市重點(diǎn)實(shí)驗(yàn)室,北京100094)
1 引言
人類對(duì)航天器性能、效率、壽命、成本提出越來(lái)越高的需求,目前有效的解決途徑是在軌服務(wù)技術(shù)。美國(guó)先后開展了軌道快車計(jì)劃[1]、鳳凰計(jì)劃[2]等項(xiàng)目,在該領(lǐng)域處于領(lǐng)先地位;歐洲各國(guó)在歐空局主導(dǎo)下開展了ROGER、ROTEX、TECSAS等在軌服務(wù)驗(yàn)證項(xiàng)目[3-6];日本也開展了與在軌服務(wù)相關(guān)的ETS-VII項(xiàng)目[7-8]。
開展在軌服務(wù)首先需要實(shí)現(xiàn)服務(wù)航天器對(duì)受服務(wù)航天器的在軌捕獲對(duì)接,小型對(duì)接機(jī)構(gòu)作為在軌服務(wù)中建立航天器間剛性連接的重要執(zhí)行系統(tǒng),是決定在軌服務(wù)任務(wù)是否能夠順利開展的關(guān)鍵設(shè)備。早期對(duì)接機(jī)構(gòu)的研究主要針對(duì)應(yīng)用于載人航天的大型航天器,該類對(duì)接機(jī)構(gòu)的主要特點(diǎn)是對(duì)接過(guò)程有人參與,典型形式為異體周邊式與中心式[9],機(jī)構(gòu)中間需設(shè)計(jì)航天員通道。隨著在軌服務(wù)技術(shù)的發(fā)展,針對(duì)在軌服務(wù)的小型對(duì)接機(jī)構(gòu)成為領(lǐng)域內(nèi)的研究熱點(diǎn),其主要特點(diǎn)是對(duì)接過(guò)程無(wú)人參與,能夠重復(fù)多次使用,并需要保證服務(wù)航天器與受服務(wù)航天器間的可靠對(duì)接與分離[10-12]。
本文在借鑒現(xiàn)有小型對(duì)接機(jī)構(gòu)設(shè)計(jì)基礎(chǔ)上,針對(duì)某型號(hào)任務(wù)對(duì)在軌無(wú)人對(duì)接捕獲的實(shí)際需求,提出一種三爪式小型無(wú)人對(duì)接機(jī)構(gòu)方案,該對(duì)接機(jī)構(gòu)由主動(dòng)捕獲機(jī)構(gòu)與被動(dòng)適配器組成,通過(guò)主動(dòng)捕獲機(jī)構(gòu)上圓周均布的3個(gè)捕獲手抓與3個(gè)線性緩沖阻尼單元,實(shí)現(xiàn)航天器間的大容差與弱沖擊捕獲對(duì)接;根據(jù)任務(wù)需求在對(duì)接機(jī)構(gòu)對(duì)接平面上設(shè)計(jì)用于工質(zhì)傳輸?shù)臋C(jī)電液接口,以實(shí)現(xiàn)航天器間的機(jī)、電、液、信息一體化對(duì)接。
2 任程分析
小型空間對(duì)接機(jī)構(gòu)的主要任務(wù)是輔助建立航天器間的剛性連接,并在此基礎(chǔ)上為在軌服務(wù)提供接口聯(lián)通與工質(zhì)傳輸通道。為確保對(duì)接機(jī)構(gòu)滿足在軌服務(wù)的應(yīng)用需求,需要對(duì)在軌服務(wù)任務(wù)流程進(jìn)行分析,以明確不同任務(wù)段對(duì)對(duì)接機(jī)構(gòu)設(shè)計(jì)的約束與要求。一次完整的在軌服務(wù)可概括為5個(gè)階段:
1)捕獲條件建立。通過(guò)服務(wù)航天器相對(duì)于受服務(wù)航天器的在軌機(jī)動(dòng),使受服務(wù)航天器中的對(duì)接部分逐步處于服務(wù)航天器對(duì)接機(jī)構(gòu)的有效捕獲容差范圍內(nèi),并保持兩航天器間的相對(duì)位姿,為航天器間的捕獲對(duì)接提供初始條件。
2)目標(biāo)捕獲與位姿校正。服務(wù)航天器利用對(duì)接機(jī)構(gòu)實(shí)現(xiàn)對(duì)受服務(wù)航天器的在軌捕獲,并通過(guò)對(duì)接機(jī)構(gòu)實(shí)現(xiàn)兩航天器間的位姿校正,為航天器間的工質(zhì)傳輸通道建立提供便捷條件。
3)弱碰撞剛性對(duì)接。在航天器相對(duì)位姿偏差校正完成后,兩航天器在對(duì)接機(jī)構(gòu)的牽引下相互靠攏,同步實(shí)現(xiàn)機(jī)電接口對(duì)接與工質(zhì)通道對(duì)接建立;為避免對(duì)服務(wù)界面造成破壞,要求對(duì)接過(guò)程盡量在弱碰撞沖擊條件下完成。
4)在軌服務(wù)。利用對(duì)接機(jī)構(gòu)建立的剛性連接條件、機(jī)電接口及工質(zhì)通道,即可有效開展航天器間的在軌服務(wù)任務(wù)。
5)解鎖分離。在軌服務(wù)任務(wù)完成后,對(duì)接機(jī)構(gòu)需根據(jù)任務(wù)指令完成工質(zhì)傳輸通道封閉、電氣斷路、機(jī)械解鎖及航天器間的在軌分離,整個(gè)分離過(guò)程要求在無(wú)沖擊條件下完成。
3 對(duì)接機(jī)構(gòu)設(shè)計(jì)
3.1 總體方案
本文設(shè)計(jì)的小型空間對(duì)接機(jī)構(gòu)主要包括主動(dòng)抓捕機(jī)構(gòu)與被動(dòng)適配器,如圖1所示。主動(dòng)抓捕機(jī)構(gòu)與被動(dòng)適配器分別安裝于服務(wù)航天器和受服務(wù)航天器上,在主動(dòng)機(jī)構(gòu)對(duì)被動(dòng)適配器抓捕對(duì)接時(shí),同步實(shí)現(xiàn)航天器間的機(jī)電、液、氣、信息傳輸通道建立。對(duì)接機(jī)構(gòu)主要設(shè)計(jì)參數(shù)如表1所示。
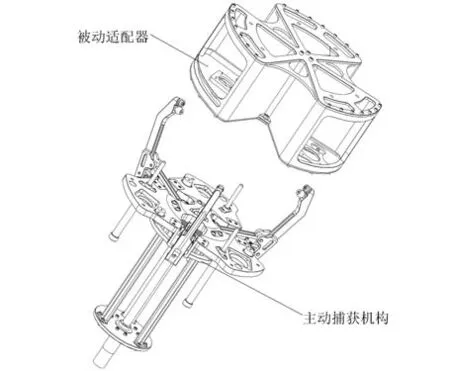
圖1 空間小型對(duì)接機(jī)構(gòu)Fig.1 Small-sized space docking mechanism
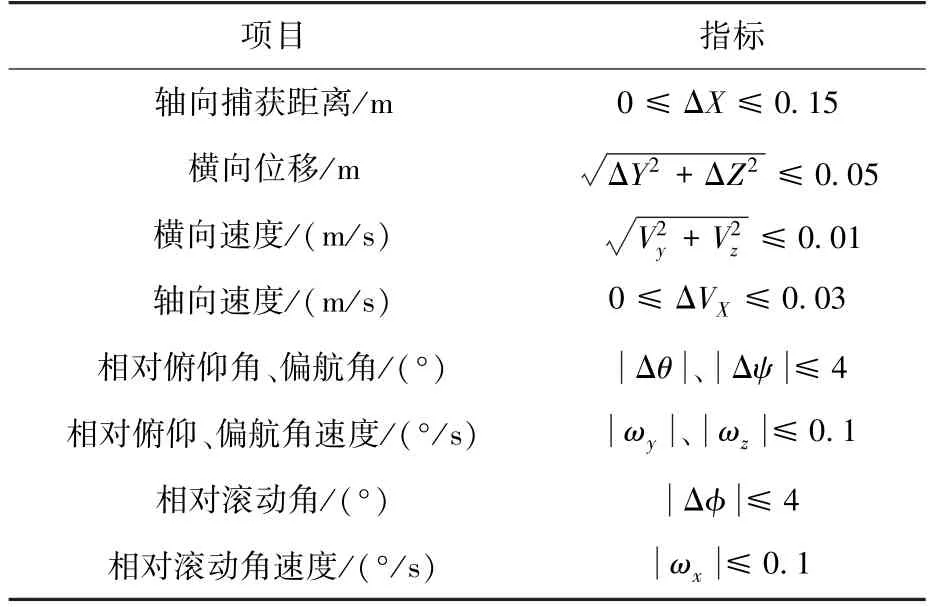
表1 對(duì)接機(jī)構(gòu)主要設(shè)計(jì)參數(shù)及指標(biāo)Table 1 Design parameters and indexes of the docking mechanism
對(duì)接機(jī)構(gòu)的工作流程設(shè)計(jì)如下:
1)服務(wù)航天器在軌機(jī)動(dòng),使受服務(wù)航天器上的被動(dòng)適配器位于主動(dòng)抓捕機(jī)構(gòu)的位姿容差內(nèi);
2)主動(dòng)抓捕機(jī)構(gòu)中圓周均布的3套捕獲手指在驅(qū)動(dòng)系統(tǒng)的驅(qū)動(dòng)下逐步收攏,并與被動(dòng)機(jī)構(gòu)上的3個(gè)V型錐面凹槽配合,實(shí)現(xiàn)航天器間的初始位姿校正;
3)驅(qū)動(dòng)系統(tǒng)通過(guò)捕獲手指帶動(dòng)被動(dòng)適配器向機(jī)構(gòu)對(duì)接平面靠攏,在緩沖阻尼器的配合下完成航天器間的機(jī)械對(duì)接;
4)在機(jī)械對(duì)接的過(guò)程中,同步完成電氣接口及工質(zhì)傳輸通道的建立;
5)開展在軌服務(wù)后,電氣及工質(zhì)傳輸通道自動(dòng)關(guān)閉,在緩沖阻尼器的作用下實(shí)現(xiàn)航天器間的無(wú)沖擊分離。
從對(duì)接機(jī)構(gòu)的工作過(guò)程可以看出,其工作過(guò)程與前文分析的在軌服務(wù)流程一致,能夠覆蓋在軌服務(wù)各任務(wù)段功能需求。
3.2 主動(dòng)機(jī)構(gòu)
主動(dòng)抓捕機(jī)構(gòu)設(shè)計(jì)為3部分:主體支撐結(jié)構(gòu)、四桿式三指抓捕機(jī)構(gòu)及其驅(qū)動(dòng)機(jī)構(gòu)。主體支撐結(jié)構(gòu)上設(shè)計(jì)有用于對(duì)接緩沖的線性阻尼器、判定鎖緊力的壓力傳感器及氣/液/電路連接器和斷接器及控制器。抓捕機(jī)構(gòu)如圖2所示,為實(shí)現(xiàn)對(duì)被動(dòng)適配器的位姿校正及可靠抓捕,采用三指圓周均勻布局,3個(gè)手指安裝于由絲杠伺服系統(tǒng)驅(qū)動(dòng)的移動(dòng)基座上,通過(guò)移動(dòng)基座平動(dòng)及各捕獲手指背部導(dǎo)向機(jī)構(gòu)的約束來(lái)實(shí)現(xiàn)3個(gè)捕獲手指的聯(lián)動(dòng),進(jìn)而完成對(duì)接過(guò)程中的三指展開和收攏。整個(gè)對(duì)接機(jī)構(gòu)只具有一個(gè)主動(dòng)自由度,這種機(jī)構(gòu)設(shè)計(jì)形式既能通過(guò)控制絲杠拉力控制整個(gè)系統(tǒng)的連接剛度,又可保證整個(gè)抓捕機(jī)構(gòu)的結(jié)構(gòu)緊湊。
小型空間對(duì)接機(jī)構(gòu)中的3套捕獲手共同集成在統(tǒng)一的圓形基座平臺(tái)上,并隨著基座平臺(tái)實(shí)現(xiàn)整體平動(dòng)。對(duì)接機(jī)構(gòu)中的每個(gè)捕獲手均由上臂、外臂、內(nèi)桿、機(jī)架等組成,其中上臂和外臂為主承力構(gòu)件,內(nèi)桿主要用于運(yùn)動(dòng)約束,4個(gè)桿件通過(guò)運(yùn)動(dòng)鉸鏈形成四連桿機(jī)構(gòu)。對(duì)接機(jī)構(gòu)單個(gè)手指的整體機(jī)構(gòu)如圖3所示。
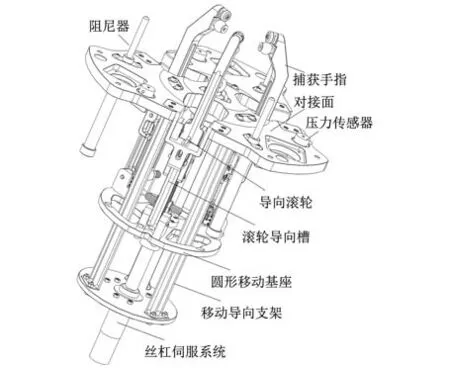
圖2 主動(dòng)抓捕機(jī)構(gòu)Fig.2 Active capture mechanism
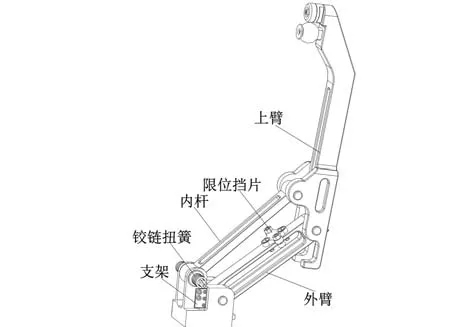
圖3 四連桿式捕獲手Fig.3 4-link capture claw
單個(gè)手指運(yùn)動(dòng)包括:①手指張開。對(duì)接初始階段,上臂的滾輪導(dǎo)向槽受導(dǎo)向滾輪約束,四連桿機(jī)構(gòu)在基座平臺(tái)的帶動(dòng)下沿移動(dòng)導(dǎo)向支承實(shí)現(xiàn)伸長(zhǎng)運(yùn)動(dòng);當(dāng)上臂的滾輪導(dǎo)向槽脫離導(dǎo)向滾輪約束時(shí),四連桿機(jī)構(gòu)在鉸鏈扭簧的作用下展開,張開角度范圍由限位擋片確定。②手指收攏。四連桿機(jī)構(gòu)在基座平臺(tái)的帶動(dòng)下沿移動(dòng)導(dǎo)向支承實(shí)現(xiàn)收縮運(yùn)動(dòng),使上臂的滾輪導(dǎo)向槽進(jìn)入導(dǎo)向滾輪的約束范圍,并隨著基座平臺(tái)的運(yùn)動(dòng)逐漸收攏,基座平臺(tái)運(yùn)動(dòng)行程由對(duì)接平面的壓力傳感器閾值確定。
為使整個(gè)機(jī)構(gòu)具有較大捕獲容差,手指采用非平行四桿機(jī)構(gòu),設(shè)計(jì)以捕獲包絡(luò)半徑為依據(jù),根據(jù)運(yùn)動(dòng)關(guān)系可得出捕獲半徑R可近似計(jì)算如式(1):

其中:Rd為基座半徑(mm);Rb為外臂長(zhǎng)度(mm);α為外臂張開角度(°)。為防止四連桿機(jī)構(gòu)收攏時(shí)產(chǎn)生運(yùn)動(dòng)過(guò)盈而導(dǎo)致整個(gè)機(jī)構(gòu)受到破壞,在上臂下部增加限位觸動(dòng)開關(guān)及機(jī)械運(yùn)動(dòng)限位。
3.3 被動(dòng)適配器
被動(dòng)調(diào)整機(jī)構(gòu)包括輔助定位的三瓣殼體以及與主動(dòng)抓捕機(jī)構(gòu)相對(duì)應(yīng)的機(jī)電液接口連接器。被動(dòng)適配器隨受服務(wù)航天器發(fā)射,集成在航天器的主結(jié)構(gòu)設(shè)計(jì)中,并在適配器上預(yù)先設(shè)計(jì)有開展在軌服務(wù)所需的機(jī)電液氣接口通路。為配合三指式主動(dòng)抓捕機(jī)構(gòu)完成受服務(wù)航天器的捕獲及相對(duì)位姿偏差校正,對(duì)接機(jī)構(gòu)被動(dòng)適配器部分采用V型三瓣式結(jié)構(gòu),在提供較大滾動(dòng)向姿態(tài)容差的同時(shí),通過(guò)三點(diǎn)接觸方式消除滾動(dòng)姿態(tài)偏差及橫向位置偏差。為了保證主動(dòng)捕獲機(jī)構(gòu)捕獲手指對(duì)被動(dòng)適配器的可靠抓捕拖動(dòng),在被動(dòng)適配器的V型槽底部設(shè)計(jì)有與捕獲手指配合的手指扣,被動(dòng)適配器整體結(jié)構(gòu)如圖4所示。為消除對(duì)接過(guò)程中的對(duì)接沖擊并實(shí)現(xiàn)對(duì)接面預(yù)緊力的動(dòng)態(tài)監(jiān)測(cè),對(duì)接機(jī)構(gòu)被動(dòng)適配器對(duì)接面上設(shè)計(jì)有與線性阻尼緩沖器相配合的倒錐孔及與壓力傳感器相配合的結(jié)構(gòu)凸臺(tái);此外,被動(dòng)適配器對(duì)接面上還設(shè)計(jì)有用于支持在軌服務(wù)的電氣接口及工質(zhì)傳輸通道接口。
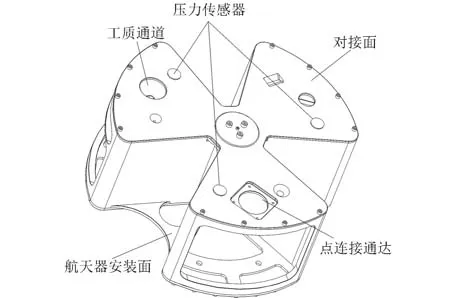
圖4 被動(dòng)適配器結(jié)構(gòu)Fig.4 Structure of the passive adapter
3.4 阻尼緩沖器
為避免航天器對(duì)接過(guò)程中發(fā)生器間剛性碰撞沖擊,同時(shí)在航天器分離時(shí)提供器間分離力,在主動(dòng)機(jī)構(gòu)的對(duì)接面上設(shè)計(jì)了用于能量耗散的阻尼緩沖器。阻尼緩沖器主要由頂桿、彈簧、殼體等組成,3套阻尼緩沖器呈三角形分布在主動(dòng)機(jī)構(gòu)的對(duì)接面上,相互間協(xié)調(diào)工作,其結(jié)構(gòu)形式如圖5所示。

圖5 阻尼緩沖器結(jié)構(gòu)Fig.5 Structure of the damp bumper
4 仿真驗(yàn)證
4.1 仿真設(shè)置
為驗(yàn)證設(shè)計(jì)的空間小型對(duì)接機(jī)構(gòu)捕獲容差是否符合指標(biāo)及該機(jī)構(gòu)對(duì)接過(guò)程中是否存在碰撞、沖擊、回彈現(xiàn)象,本文利用Adams多體動(dòng)力學(xué)仿真軟件建立對(duì)接機(jī)構(gòu)動(dòng)力學(xué)仿真模型,如圖6所示。仿真模型的初始對(duì)接容差按表1所示,按對(duì)接機(jī)構(gòu)設(shè)計(jì)的最大允許容差指標(biāo)設(shè)定,模型中對(duì)接航天器的質(zhì)量特性參照某任務(wù)中航天器質(zhì)量特性設(shè)定(表2)。
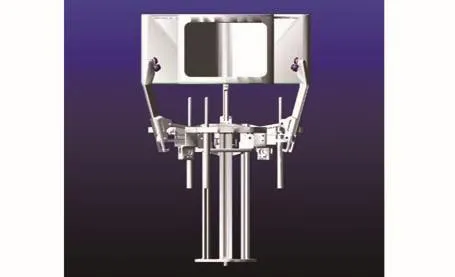
圖6 對(duì)接機(jī)構(gòu)仿真模型Fig.6 Simulation model of the docking mechanism
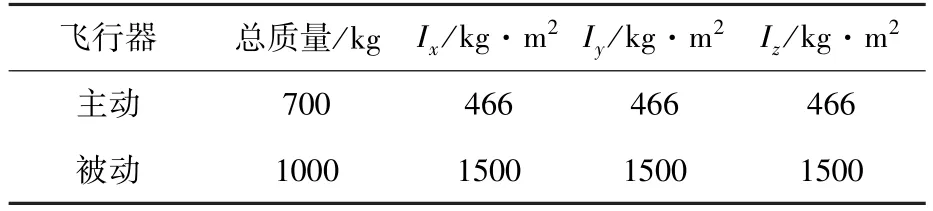
表2 航天器質(zhì)量參數(shù)Table 2 Quality parameters of the spacecraft
為真實(shí)反映機(jī)構(gòu)對(duì)接過(guò)程中的動(dòng)力學(xué)特性,在建立對(duì)接機(jī)構(gòu)幾何特征、對(duì)接約束條件等的基礎(chǔ)上,定義對(duì)接機(jī)構(gòu)接觸、摩擦等非線性特性。其中,捕獲爪與對(duì)接機(jī)構(gòu)被動(dòng)部分之間根據(jù)真實(shí)材料特性設(shè)置摩擦參數(shù),建立接觸約束;緩沖桿與對(duì)接機(jī)構(gòu)被動(dòng)部分在對(duì)接過(guò)程中的接觸碰撞采用式(2)所示Hertz沖擊函數(shù)模型描述:

其中:F為法向接觸力,K為接觸剛度系數(shù),C為阻尼系數(shù),δ、δ˙分別表示接觸法向嵌入量和穿透速度,e為剛度項(xiàng)的貢獻(xiàn)因子。
4.2 對(duì)接過(guò)程仿真
根據(jù)建立的仿真模型,仿真過(guò)程(50 s)中所得主動(dòng)服務(wù)航天器與被動(dòng)受服務(wù)航天器間的相對(duì)距離隨時(shí)間變化曲線如圖7中所示,主被動(dòng)航天器相對(duì)姿態(tài)變化曲線如圖8所示。
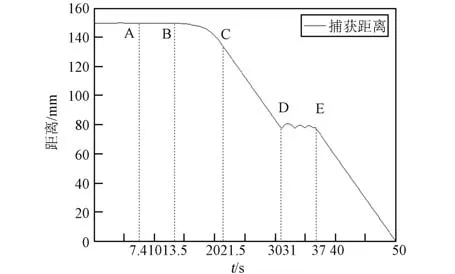
圖7 捕獲距離變化曲線Fig.7 Curve of the capture distance
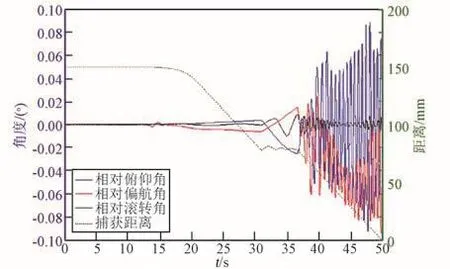
圖8 航天器相對(duì)姿態(tài)曲線Fig.8 Relative pose curves of the spacecraft
4.3 對(duì)接過(guò)程分析
從圖8可以看出,在給定的初始捕獲容差下,主動(dòng)機(jī)構(gòu)可以實(shí)現(xiàn)對(duì)被動(dòng)適配器的捕獲對(duì)接,表明對(duì)接機(jī)構(gòu)主要設(shè)計(jì)參數(shù)及指標(biāo)滿足設(shè)計(jì)要求。為便于對(duì)機(jī)構(gòu)進(jìn)行優(yōu)化設(shè)計(jì),進(jìn)一步對(duì)對(duì)接機(jī)構(gòu)仿真過(guò)程中的力學(xué)特性進(jìn)行分析。從圖7中可看出,對(duì)接機(jī)構(gòu)的整個(gè)對(duì)接過(guò)程可劃分為5個(gè)階段:
1)自由對(duì)接階段(AB段)。主動(dòng)機(jī)構(gòu)的捕獲爪開始合攏,兩器無(wú)直接力相互作用,兩器間的距離不發(fā)生變化。
2)加速接近階段(BC段)。捕獲爪夾緊被動(dòng)適配器花瓣后建立器間軟連接,捕獲爪在絲杠驅(qū)動(dòng)下以恒定速度收攏,捕獲爪與瓣殼間的受力以滑動(dòng)摩擦力為主,如圖9、10所示。
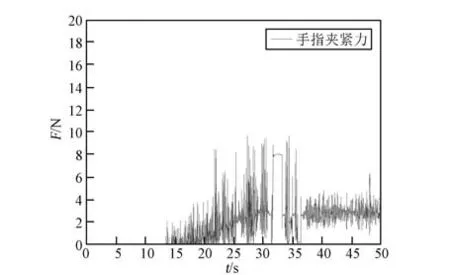
圖9 捕獲爪夾緊力曲線Fig.9 Clamp force curves of the claw

圖10 手指摩擦力曲線Fig.10 Friction force curves of the claw
3)穩(wěn)定接近階段(CD段)。到達(dá)C點(diǎn)時(shí)器間相對(duì)接近速度與捕獲爪收攏速度一致,被動(dòng)航天器與捕獲爪相對(duì)靜止,并以恒定速度靠近,滑動(dòng)摩擦力為0,如圖10所示。
4)波動(dòng)調(diào)整階段(DE段)。瓣殼接觸到緩沖器頂端,受到緩沖器中彈簧支撐作用反彈;而捕獲爪仍以恒定速度收攏,捕獲爪與被動(dòng)航天器間的相對(duì)滑動(dòng)產(chǎn)生滑動(dòng)摩擦力并導(dǎo)致被動(dòng)航天器反復(fù)壓縮緩沖器,主被動(dòng)航天器相對(duì)距離出現(xiàn)振蕩,如圖10、11所示。
5)剛性連接階段(從E點(diǎn)到距離為0處)。捕獲爪運(yùn)動(dòng)至手指槽,器間剛性連接建立;被動(dòng)飛行器在緩沖器與捕獲爪的合力作用下以恒定速度接近主動(dòng)飛行器直至對(duì)接結(jié)束。
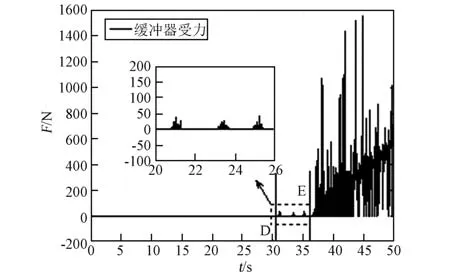
圖11 緩沖器緩沖力曲線Fig.11 Buffering force curves of the damp bumper
從對(duì)接仿真過(guò)程中可以看出,航天器間相對(duì)位置振蕩主要發(fā)生在波動(dòng)調(diào)整段,振蕩反映的是阻尼緩沖器能量耗散的主要過(guò)程。在這段過(guò)程中對(duì)接機(jī)構(gòu)被動(dòng)部分對(duì)接面與緩沖桿開始作用,但是捕獲爪指并未收回到對(duì)接機(jī)構(gòu)被動(dòng)部分的配合卡槽處,被動(dòng)航天器在受到緩沖器作用下不斷地小幅反彈,通過(guò)捕獲爪與瓣殼間的滑動(dòng)摩擦不斷耗能,對(duì)接過(guò)程中的能量耗散曲線如圖12所示,耗散能量約占電機(jī)輸入能力的0.5%,超過(guò)99%的電機(jī)輸入能量被緩沖器以彈簧勢(shì)能形式吸收。

圖12 對(duì)接機(jī)構(gòu)能量耗散曲線Fig.12 Energy dissipation curves of docking mechanism
忽略對(duì)接過(guò)程結(jié)束時(shí)仿真軟件計(jì)算結(jié)果發(fā)散,從仿真結(jié)果中可以明確看出,單個(gè)緩沖阻尼器的最大緩沖行程為80 mm,未達(dá)到桿可用緩沖行程的最大范圍,具備一定的緩沖行程余量,單個(gè)緩沖阻尼器的最大緩沖吸能約為23 J,整個(gè)對(duì)接仿真過(guò)程運(yùn)動(dòng)平穩(wěn),未出現(xiàn)沖擊碰撞與回彈現(xiàn)象。
5 結(jié)論
1)設(shè)計(jì)了可用于在軌服務(wù)的三爪式輕小型無(wú)人對(duì)接機(jī)構(gòu),可在對(duì)接過(guò)程中同步建立航天器間的機(jī)、電、氣、液傳輸通道,對(duì)接機(jī)構(gòu)工作過(guò)程與在軌服務(wù)任務(wù)流程保持一致。
2)經(jīng)仿真驗(yàn)證對(duì)接機(jī)構(gòu)軸向位置捕獲容差達(dá)150 mm,線速度容差為30 mm/s;徑向位置捕獲容差為50 mm,線速度容差為10 mm/s;三向姿態(tài)容差為4°,角速度容差為0.1°/s。
3)經(jīng)仿真驗(yàn)證對(duì)接機(jī)構(gòu)中設(shè)計(jì)的阻尼緩沖器能夠有效消除對(duì)接過(guò)程中可能出現(xiàn)的沖擊與回彈現(xiàn)象,并可儲(chǔ)存超過(guò)99%的系統(tǒng)能量,整個(gè)對(duì)接機(jī)構(gòu)具有較好的能量耗散特性。
猜你喜歡
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
今日農(nóng)業(yè)(2019年14期)2019-09-18 01:21:54
今日農(nóng)業(yè)(2019年12期)2019-08-15 00:56:32
今日農(nóng)業(yè)(2019年10期)2019-01-04 04:28:15
今日農(nóng)業(yè)(2019年15期)2019-01-03 12:11:33
今日農(nóng)業(yè)(2019年16期)2019-01-03 11:39:20
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
商周刊(2017年9期)2017-08-22 02:57:56
海峽姐妹(2017年7期)2017-07-31 19:08:17