一種聯合多特征量的SAR人造微弱痕跡檢測方法
2019-12-24 06:29:04王志浩張金松孫光才邢孟道
西安電子科技大學學報 2019年6期
王志浩,張金松,孫光才,李 軍,邢孟道
(1.西安電子科技大學 雷達信號處理國家重點實驗室,陜西 西安 710071;2.北京無線電測量研究所,北京 100854)
合成孔徑雷達(Synthetic Aperture Radar,SAR)通過距離向發射大帶寬信號及方位向平臺運動形成長合成陣列,可以獲得高分辨二維遙感圖像[1-4]。由于合成孔徑雷達具有全天時、全天候的優勢,因此其在軍事和民用領域均具有極為廣泛的應用,其中一種應用便是利用合成孔徑雷達對腳印、車輪印等人造微弱痕跡進行檢測。從軍用角度,對腳印、車輪印等人造微弱痕跡的檢測可以提前獲知目標區域內敵方地面部隊的存在與動向,從而在戰場偵察中發揮重要作用;而在民用領域,通過對森林、荒漠等人跡罕至區域中腳印、車輪印等人造微弱痕跡的檢測可以獲取人類活動信息,在反恐、搜救等方面具有廣闊的應用空間。
在對人造微弱痕跡進行檢測時,普通的光學圖像和合成孔徑雷達圖像受到觀測條件、圖像分辨率等的限制,難以觀測到諸如腳印、車輪印等尺寸微小的微弱痕跡,而傳統的合成孔徑雷達非相干變化檢測方法[5](Incoherent Coherent Change Detection,ICCD)由于只利用了合成孔徑雷達圖像的幅度信息而忽略了相位信息,故其對場景的變化不夠敏感,難以取得較好的檢測性能。相比之下,由于充分利用了合成孔徑雷達復圖像的相位信息,相干變化檢測方法(Coherent Change Detection,CCD)對場景的變化更加敏感,其對變化的檢測精度可達波長的五分之一[6]。因此,目前主要采用相干變化檢測對人造痕跡進行檢測。然而,對于植被、河流等自然區域,較強的時間失相關性[7]使其同樣表現為低相關系數。故利用傳統相干變化檢測方法對人造微弱痕跡進行檢測時,會檢測出大范圍的自然區域,從而導致虛警率升高。因此,如何在不影響人造微弱痕跡檢測準確度的同時盡可能地降低虛警概率,成為了一個亟待解決的難題。
針對傳統相干變化檢測方法存在的問題,國內外學者也進行了大量研究,文獻[8-10]從檢驗統計量角度進行了改進。其中文獻[8-9]提出以廣義似然比作為檢驗統計量代替原有的復相關系數;文獻[10]則采用斯托克斯參數作為檢驗統計量;文獻[11]從統計樣本的選取方式入手,采用刪除平均法選取樣本對相關性進行估計,這些方法相比于傳統方法都取得了不錯的改進效果,可以在一定程度上降低虛警率,但單純地采用相關性量度無法從根本上剔除掉同樣呈現低相關性的自然環境區域;文獻[12]提出利用多航過合成孔徑雷達圖像進行檢測,以達到抑制相干變化檢測雜波的目的;文獻[13]則從頻率維度進行擴展采用多波段合成孔徑雷達數據進行檢測。這些方法通過多次重軌觀測可以獲得多維度信息,從而對人造痕跡和虛警目標有著不錯的區分效果,然而多航過飛行對間隔時間、軌道精度等實驗條件要求較高,且易產生基線失相關,從而影響檢測結果;文獻[14]提出了一種聯合非相干與相干處理的兩步檢測方法。為檢測框架的改進提供了一種新的思路,但是該方法只是采用相干變化檢測對非相干變化檢測處理中未能檢測出的場景變化進行進一步檢測,并未對虛警區域的特性和剔除進行分析。
為了能從雙航過毫米波合成孔徑雷達復圖像中檢測到腳印、車輪印等人造微弱痕跡,同時去除河流、植被等自然區域造成的大量虛警, 筆者提出了一種聯合多特征量的毫米波合成孔徑雷達人造微弱痕跡檢測方法。該方法首先采用相干變化檢測法對人造微弱痕跡進行粗檢測,獲取包含虛警區域在內的粗檢測結果;接著通過分析植被和河流區域的雷達散射截面積(Radar Cross Section, RCS)特性,提出采用合成孔徑雷達復圖像對的圖像強度差及圖像強度和作為檢驗統計量,分別對植被及河流區域產生的虛警進行剔除,進而獲得對人造微弱痕跡的精檢測結果;最后毫米波合成孔徑雷達實測數據的處理結果證明了所提方法的有效性。
1 基于相干變化檢測的人造微弱痕跡粗檢測
1.1 合成孔徑雷達復圖像對的統計特性
將不同時刻觀測同一區域獲取的兩幅合成孔徑雷達復圖像分別記為f和g,經過圖像配準后,兩幅圖像的對應像素構成二維聯合矢量X=[f,g]T。根據中心極限定理,X服從零均值二維復高斯分布,其概率密度函數(Probability Density Function,PDF)為[15]
(1)
其中,|·|表示取行列式;XH為X的共軛轉置;CX為X的協方差矩陣,其表達式為
(2)

1.2 相干變化檢測算法原理
在相干變化檢測算法中,通常采用如下的估計算子對復相關系數進行估計:
(3)
其中,N為用于聯合估計的鄰域像素個數,其取值需與實際變化場景的大小保持一致。通過式(3)計算即可得到合成孔徑雷達復圖像對復相關系數的幅度圖,在圖中可以根據相關系數大小對變化區域與不變區域進行直觀的區分。
式(3)中的估計算子具有如下形式的概率密度函數[16]:
(4)
其中,2F1(··;·;·;·)表示高斯超幾何函數。
由于不變區域本身具有一定的時變性,故其實際的相關系數值γ要小于1。文獻[6]對γ取不同值時的受試者工作特征曲線(Receiver Operating Characteristic,ROC)進行了仿真,發現γ=0.6時,虛警概率的仿真結果最接近理論值。根據這一結論,可以建立如下的假設檢驗:
(5)
其中,H0和H1分別表示場景未發生變化和發生變化時的假設檢驗。由式(4)可得,兩種假設檢驗的概率密度函數分別為
(6)
根據式(6),圖1給出了N=9時兩種假設檢驗的概率密度函數分布曲線。其中虛線和實線分別表示假設檢驗H0和H1。從圖1可以看出,兩條曲線的峰值位置具有明顯的差異,可以通過一定的判決準則選取閾值對復相關系數幅度圖進行二值化處理,進而獲得對變化區域的檢測結果。
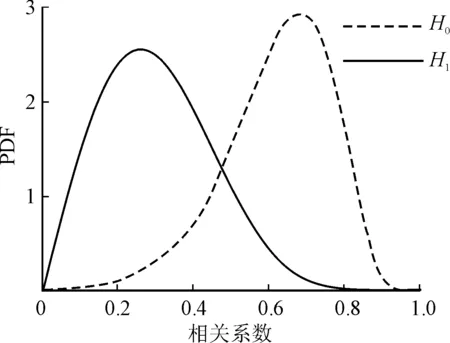
圖1 N=9時兩種假設檢驗的概率密度函數曲線
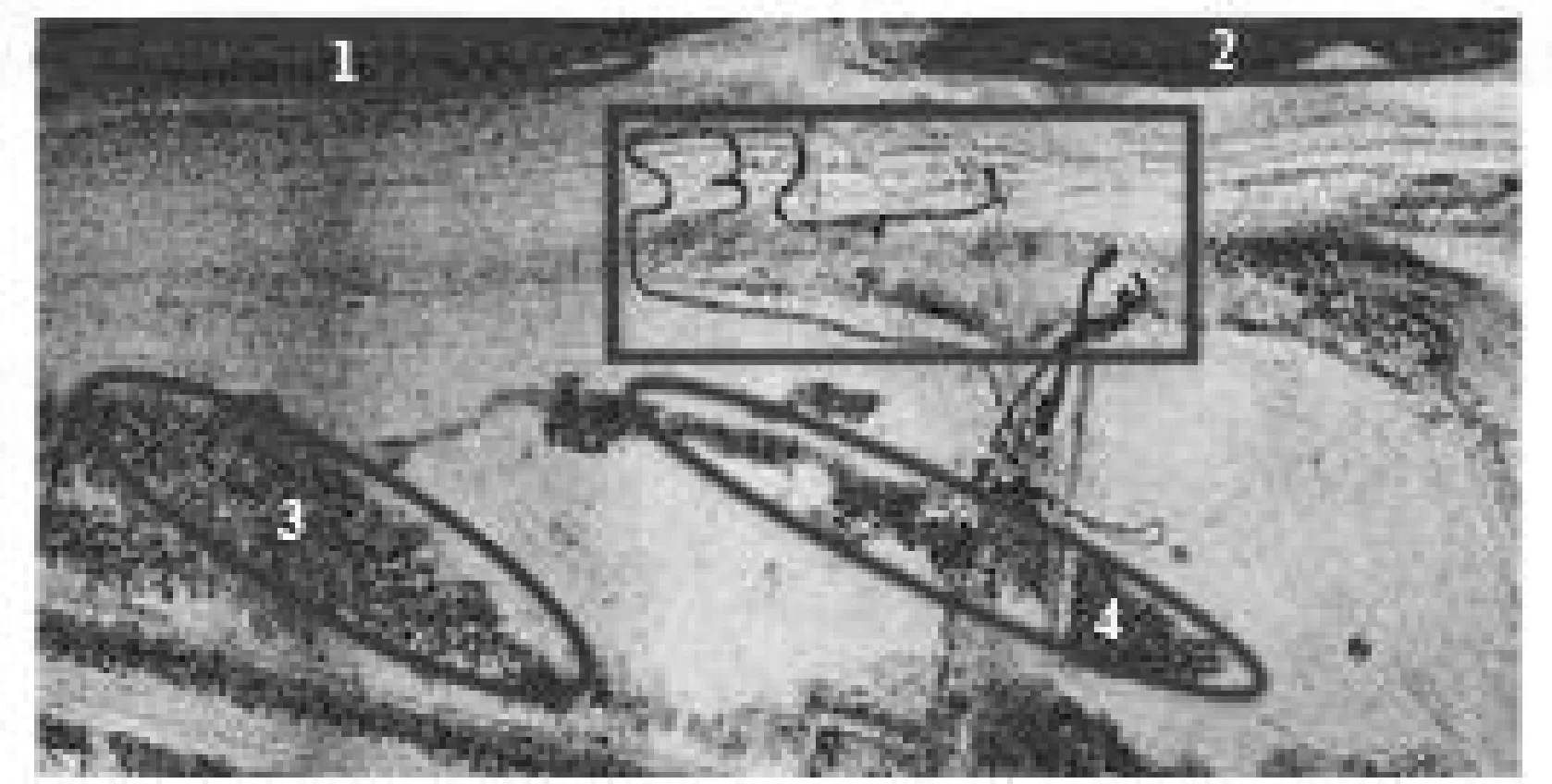
圖2 采用傳統相干變化檢測方法的檢測結果
2 基于多重特征量的人造微弱痕跡精檢測
由于植被、河流等自然區域本身具有較強的時間失相關性,因此在利用相干變化檢測法進行檢測時,這些區域和人造微弱痕跡一樣會呈現低相關性,從而在最后的檢測結果中表現為虛警區域。本節在分析這些自然區域雷達散射截面積特性的基礎上,提出以復圖像對的圖像強度差及圖像強度和作為特征量分別對河流和植被區域進行剔除。為了便于敘述,圖2給出了某次實驗中采用相干變化檢測法對人造微弱痕跡進行粗檢測的結果,圖中用矩形框標出了地面人造痕跡區域,用橢圓框標出了由植被、河流造成的4塊虛警區域。該次實驗的具體過程及處理結果將在下一節中進行詳細討論。
2.1 基于圖像強度和的河流區域剔除
為了最大化河流與人造微弱痕跡的差異,實現河流區域的有效剔除,本節采用Morchin模型[17]對兩者的雷達散射截面積特性進行對比分析。在該模型中,不同類型地面及不同等級海面的后向散射系數可表示為
(7)
其中,λ為波長;θg為雷達觀測的擦地角;A、B、u、β0均為特征參數,其大小與地面類型及海情等級有關,不同地形下特征參數的具體取值在文獻[17]中有詳細討論,這里不再贅述。
根據Morchin模型,圖3給出了波長為8 mm,擦地角范圍為0°~80°時河流、沙地、田地、丘陵和山地的后向散射系數隨擦地角的變化曲線,其中河流采用一級海情的海面進行近似。從圖中可以看出,河流區域相對于各個類型的地面區域,其后向散射系數有著大幅度的降低,因此其在合成孔徑雷達復圖像對中的幅度也相應地低于其他區域。
基于上述分析,本小節提出以合成孔徑雷達復圖像對的圖像強度和S作為檢驗統計量來對粗檢測結果中河流區域造成的虛警進行剔除,其計算公式為
(8)
其中,|fk|和|gk|分別為合成孔徑雷達復圖像對中對應像素的幅值,估計時采用均值濾波器對相干斑噪聲進行抑制;N為用于均值濾波的鄰域像素數。
對圖2中的虛警區域1及人造微弱痕跡區域的圖像強度和S進行統計,統計直方圖分別如圖4(a)、(b)所示。從圖4可以看出,虛警區域1的圖像強度和S分布在90 dB附近,而人造微弱痕跡區域的圖像強度和S則分布在115 dB附近,故采用統計量S可以很好地將河流與地面人造微弱痕跡進行區分。
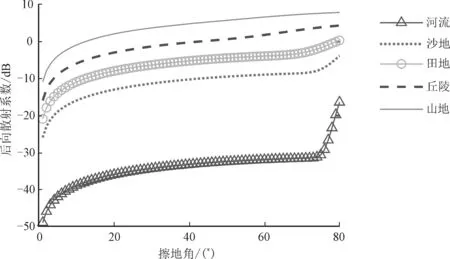
圖3 不同地形的后向散射系數
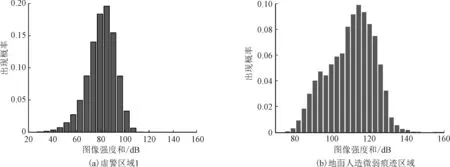
圖4 不同區域圖像強度和的統計直方圖
2.2 基于圖像強度差的植被目標剔除
植被易受到風吹雨淋等自然因素的影響產生無規則擺動,本節針對這一擺動產生的影響進行分析,進而討論植被區域產生虛警的成因及相應的剔除方法。
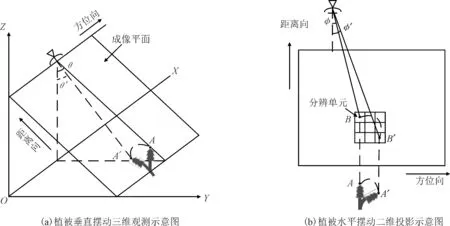
圖5 植被目標擺動的簡化模型示意圖
首先,建立簡化的植被擺動模型。將植被目標的無規則擺動分解為水平方向(平行于載機航向)和垂直方向(垂直于載機航向),分別如圖5(a)、(b)所示,其中X軸方向為載機航向,考慮植被上某一散射點A,其受風吹雨淋等自然因素的影響無規則擺動至點A′ 處,在此過程中,其在成像平面上的投影位置也相應地由點B移動至點B′處。根據圖5所示的擺動模型,可以將植被目標無規則擺動產生的影響歸納為以下3個方面:①同一散射點空間位置的變化;②雷達對同一散射點觀測的下視角θ和方位角φ的變化;③同一散射點在圖像上位置的越分辨單元移動。
同一散射點空間位置的變化會造成嚴重的失相關性,假設合成孔徑雷達復圖像對的初始相關系數為ρ,則散射點的空間位移會使得復相關系數變為[18]
ρ′=ρρt,
(9)
其中,ρt為去相關因子,其表達式為[18]
(10)
其中,λ為波長,?為入射角,Δy和Δz分別為散射點在垂直和高度方向上的位置變化量。從式(11)中可以看出,對于波長為毫米量級的毫米波合成孔徑雷達,散射點任何微小的位移都會導致ρt無限接近于零,使得合成孔徑雷達復圖像對的相關系數大幅降低。故采用相干變化檢測方法進行人造微弱痕跡檢測時,植被目標同樣會呈現出低相關性,造成大片虛警區域。
由于植被的結構不規則,散射機理復雜,難以通過嚴格的理論計算得出其雷達散射截面積的精確數值,因此常采用實際測量的方法給出后向散射系數σ0在不同參數下的參考數值。文獻[19]根據對植被σ0的實際測量結果,給出了σ0隨下視角θ增大而降低的變化關系曲線;該曲線說明了植被擺動導致的下視角變化,會造成σ0發生較大變化,從而使得相同植被區域在合成孔徑雷達復圖像對中的幅度發生較大變化。除此之外,當圖像分辨率較高或植被擺動幅度較大時,同一散射點在圖像上嚴重的越分辨單元移動現象也會導致同一植被區域的幅度變化。
相比之下,腳印、車輪印等人造微弱痕跡位置較為固定,不會因擺動產生上述影響,因此其在復圖像對中對應像素的幅度變化相對植被區域要低很多。基于這一分析,本小節提出以合成孔徑雷達復圖像對的圖像強度差D作為檢驗統計量來對植被區域造成的虛警進行剔除,其計算公式為
(11)
其中,|fk|和|gk|分別為合成孔徑雷達復圖像對中對應像素的幅值,估計時同樣采用均值濾波器對相干斑噪聲進行抑制;N為用于均值濾波的鄰域像素數。
對圖2中的虛警區域2~4及人造微弱痕跡區域的圖像強度差D進行統計,統計結果分別如圖6(a)~(d)所示。從圖6可以看出,虛警區域2~4的圖像強度差都集中分布在95 dB附近,而人造微弱痕跡區域的圖像強度差則分布在80 dB附近,故采用統計量D可很好地將植被區域和地面人造微弱痕跡進行區分。
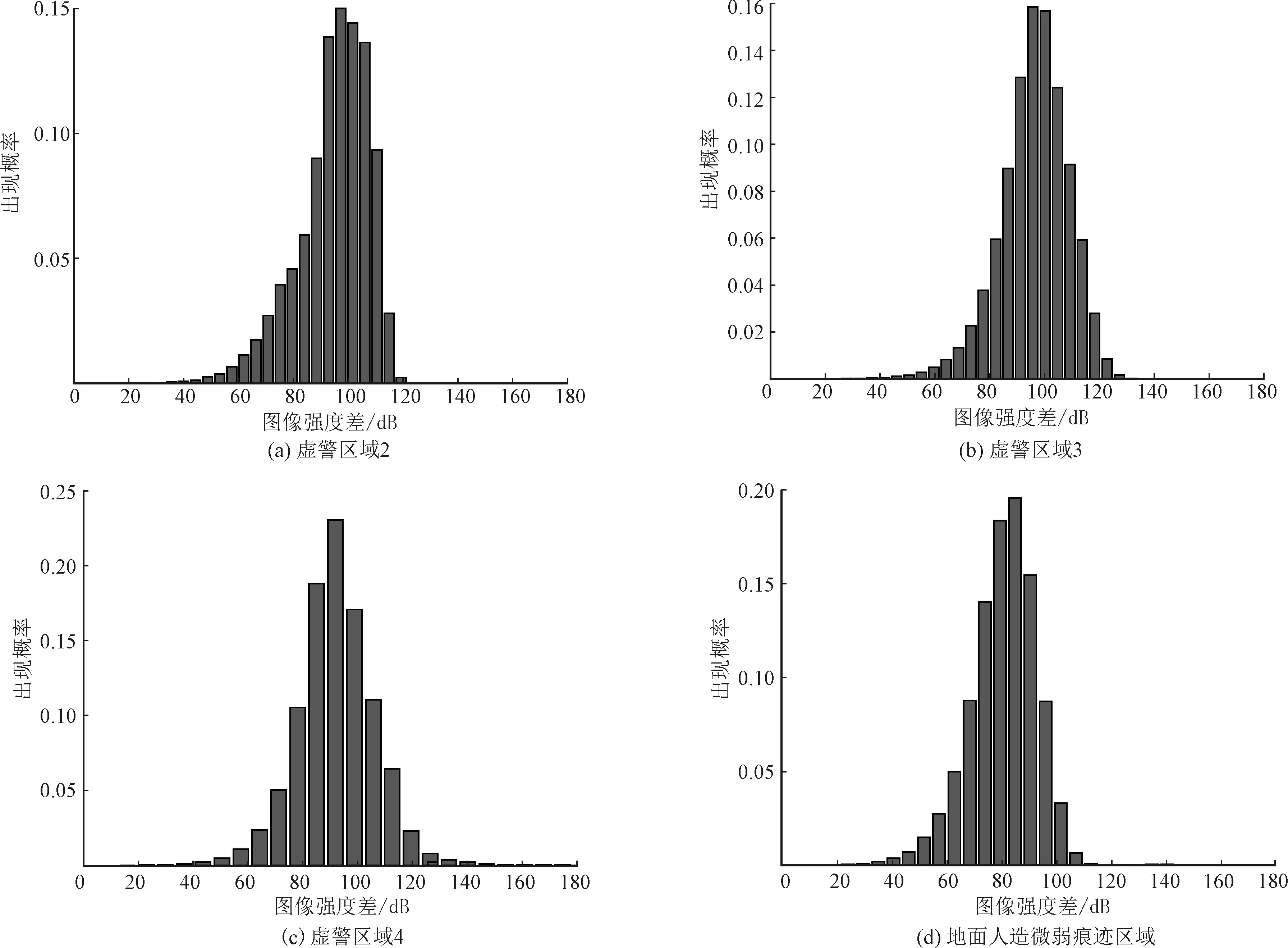
圖6 不同區域圖像強度差的統計直方圖
3 算法流程與實驗結果分析
3.1 算法流程
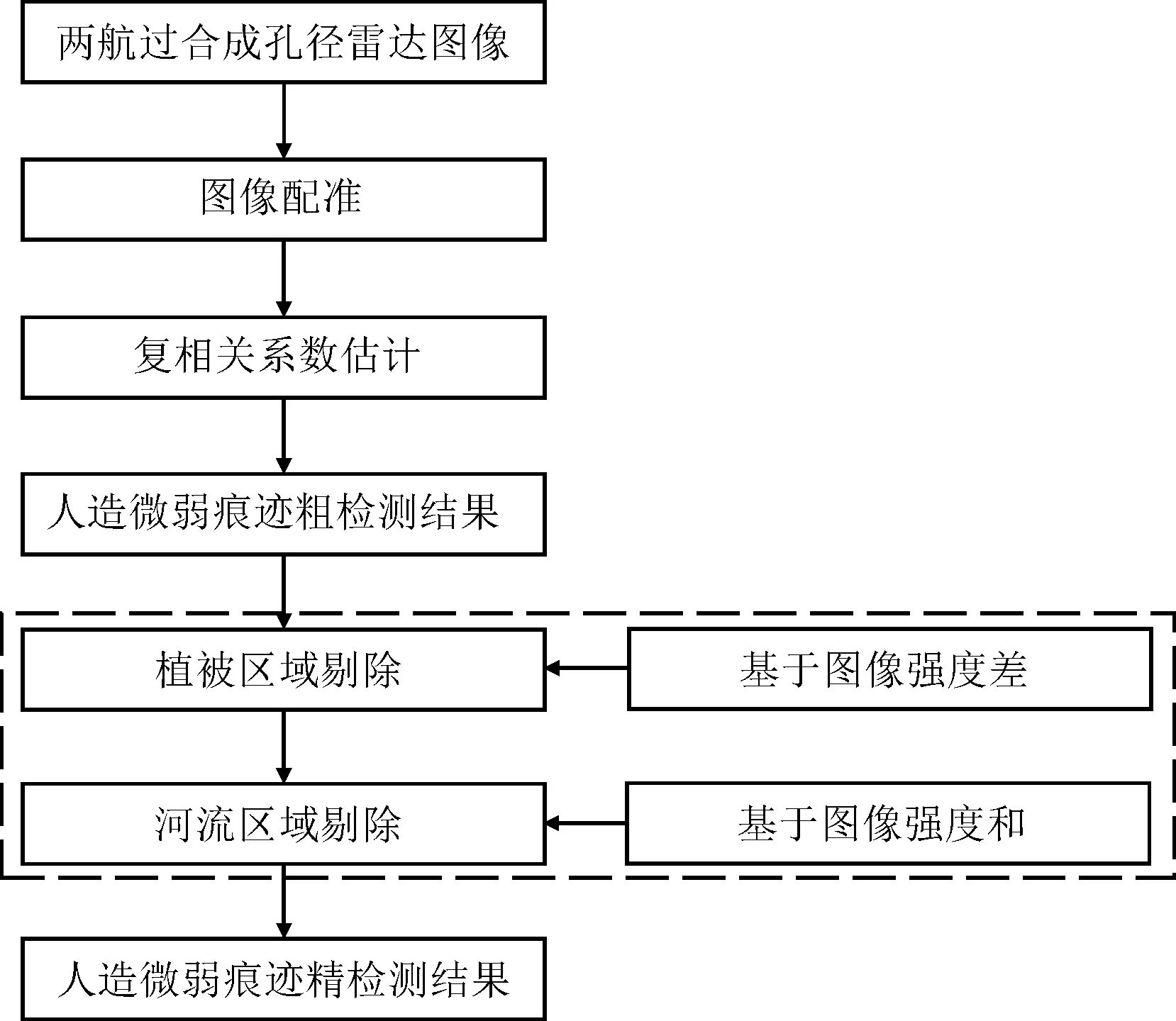
圖7 文中所提方法的流程圖
根據第1、2節的分析,圖7給出了文中所提方法的流程圖。首先對不同時刻獲取的兩航過合成孔徑雷達復圖像對進行圖像配準,在此基礎上進行相關性估計,得到復相關系數的幅度圖,進而通過閾值處理得到包含虛警區域在內的粗檢測結果;接著根據式(11)和式(8)分別得到基于圖像強度差及圖像強度和的差異圖像,將其中檢測到的區域坐標記錄下來,并在粗檢測結果中將相應位置進行剔除(相關系數置為1),從而得到對人造微弱痕跡的精檢測結果。
3.2 實驗結果分析
利用文中方法對毫米波合成孔徑雷達實測數據的處理結果如圖8所示。實驗場景為煙臺市周邊的一個沙灘區域,包含植被、河流等復雜自然環境。未產生人造痕跡時對沙灘區域的觀測結果如圖8(a)所示,經過汽車行駛和腳印踩踏形成人造微弱痕跡后,對目標區域進行二次觀測,結果如圖8(b)所示。由于痕跡微弱,故從中并不能直接觀測到人造微弱痕跡。
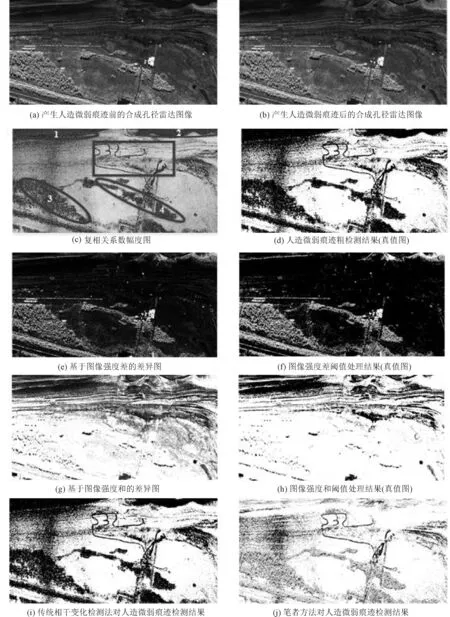
圖8 毫米波合成孔徑雷達實測數據處理結果
對獲取的合成孔徑雷達復圖像對,首先進行圖像配準,之后進行相關性估計,得到復相關系數幅度圖如圖8(c)所示,圖中人造微弱痕跡用矩形框標出,其周圍的四大塊河流、植被等自然區域也呈現出低相關性,對其進行標注,分別記為虛警區域1~4,對圖8(c)進行閾值處理,得到包含大片虛警區域的粗檢測結果如圖8(d)所示。在此基礎上,根據式(11)得到基于圖像強度差的差異圖像及其閾值處理結果分別如圖8(e)、(f)所示。從圖中可以看出,虛警區域2~4圖像強度差較大,可被檢測出來。緊接著,通過式(8)進一步得到基于圖像強度和的差異圖及其閾值處理結果,分別如圖8(g)、(h)所示。從圖中可以看出,虛警區域1圖像強度和較小,可被檢測出來。最后,將圖8(f)、(h)中檢測出來的虛警區域在初始檢測結果圖8(d)中進行剔除,即得到了對人造微弱痕跡的精檢測結果,如圖8(j)所示。為了更加直觀地進行對比,圖8(i)、(j)分別給出了采用傳統相干變化檢測方法和文中方法進行人造微弱痕跡檢測的結果,從圖中可以看到,相比于傳統方法,采用文中方法進行處理后,虛警區域1~4得以被剔除,從而有效地降低了人造微弱痕跡檢測時的虛警率。
對于人造微弱痕跡的檢測結果,這里采用圖像語義分割[20]對其準確率和虛警率進行評估,從定量角度進行進一步分析。準確率Pre和虛警率Pfa可表示為
(12)
(13)
其中,NTP、NFP和NTN分別為真正樣本、假正樣本和真負樣本對應的像素點數。根據上式對圖8(i)、(j)中各個區域檢測的準確率和虛警率進行計算,結果如表1所示,其中4個虛警區域由于不存在人造微弱痕跡,故不討論其準確率。從表1可以看出,采用文中方法對腳印、車輪印等人造微弱痕跡進行檢測可以提升檢測的準確率,同時降低其虛警率,進而有效地提升了檢測性能。

表1 人造微弱痕跡檢測結果的準確率與虛警率對比 %
4 結束語
采用傳統相干變化檢測方法檢測腳印、車輪印等人造微弱痕跡時易受河流、植被等自然區域影響產生大量虛警。 筆者在分析河流與植被雷達散射截面積特性的基礎上,引入合成孔徑雷達復圖像對的圖像強度差與圖像強度和作為檢驗統計量,提出了一種聯合多重特征量的毫米波合成孔徑雷達人造微弱痕跡檢測方法。該方法可以有效地剔除河流與植被區域,獲得對人造微弱痕跡的精檢測結果。利用傳統相干變化檢測方法和筆者所提方法對毫米波合成孔徑雷達實測數據的處理結果驗證了筆者所提方法的有效性。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電測與儀表(2015年5期)2015-04-09 11:30:52